大型復雜鍛鑄件三維掃描點云數據去噪及光順研究
2017-07-19 12:57:41霍洪旭姜興宇
重型機械 2017年3期
鄭 鵬,霍洪旭,姜興宇
(沈陽工業大學 機械工程系,遼寧 沈陽 110870)
大型復雜鍛鑄件三維掃描點云數據去噪及光順研究
鄭 鵬,霍洪旭,姜興宇
(沈陽工業大學 機械工程系,遼寧 沈陽 110870)
逆向工程,對鍛鑄件的三維點云數據處理是獲得復雜零件外形尺寸的關鍵環節。如何從散亂的、多噪點的點云數據中得到無噪點、光滑的三維點云是人們一直研究的重點。依據散亂點云中的噪聲點的特征進行分類,并提出一種分步去噪及光順方法。首先用格網閥值法去除第一類噪點,用格網法去除第二類噪點,最后用雙邊濾波法對數據進行光順處理。結果表明該方法不僅有效去除了鍛鑄件的三維點云數據的噪聲點,同時獲得了光滑的測量表面,保留了尖銳特征。
三維激光掃描;數據處理;數據濾波;去噪;光順;鍛鑄件
0 前言
三維測量方法可分成接觸式與非接觸式兩類。接觸式基于力觸發原理測量三維數據,典型設備是三坐標測量儀(CMM)。大型復雜鍛鑄件由于表面粗糙,結構復雜,對其測量以非接觸式為主。非接觸式測量是基于光學、聲學和電磁學原理[1],通過算法將物理模擬量轉化為三維點云。在采集鍛鑄件的點云數據時,由于測量儀器本身的缺陷和人為干擾等原因,在采集到的點云數據點中往往含有大量噪聲點。為了保證測量精度,同時又能保證形貌數據完整,必須先對原始點云數據進行去噪和光順處理。然而對鍛鑄件的三維點云數據處理的研究相對滯后,點云數據去噪和光順一直是人們研究的重點。
許多學者已經在去噪、光順方面做出了一些研究。劉輝等人將最小二乘法用于輪廓內的連續錯誤噪點的數據濾波,提出一種對雙向去噪方法[2]。王麗輝等人將魯棒的模糊C均值算法用于去除大噪點,提出一種魯棒算法和點云雙邊濾波結合去噪方法[3]。梁新合等人將光順后的結果作為補償量,提出一種補償濾波算法[4]。宋陽等人引入模糊聚類權重因子,提出一種改進C均值算法[5]去除大尺寸噪點。通過分析發現幾乎每一種算法都有一定的局限性,有待進一步的改進。
在MATLAB環境下獲取點云數據,并完成數據重構,并根據MATLAB的環境中點云數據特點,對噪點進行分類去噪光順。本文根據點云數據特征類型,將其分成四類,第一類數據點是偏離真實樣件數據點較遠的、數量較少的離散稀疏噪點。第二類是偏離真實樣件數據點較遠的、數量較多的密集噪點。第三類是由于設備原因在真實樣件的數據點中穿插的不易處理的噪點。第四類數據點是樣件理想狀態下的數據點。針對上述問題,本文提出一種結合格網閥值法和三維雙邊濾波方法的點云數據去噪及光順算法。這樣處理的優點在于既可以解決原始點云數據中包含的孤立點云,也避免產生過光順的問題。
本文對大型復雜鍛造件進行數據處理實驗,證明該方法與傳統的單一形式去噪方法相比,不但高效去除點云數據的噪聲點、完成數據光順,同時還保留了樣件的基本特征。
1 第一類噪點去除算法
第一類噪點為懸浮在樣件數據上空,并散亂稀疏的分布在四周,如圖1所示。同時也是很明顯的錯誤點,必須在光順前去除。本文采用格網閥值法,通過劃分網格,求其數據點的數量與預先設定的閥值對比,如果數量小于閥值,則將該網格內的所有點從原始數據點中刪除。這樣做的目的是刪除第一類噪點,也叫孤點。具體方法如下:
圖1 某測量實驗的三維點云原始數據
1.1 構建虛擬包圍盒
首先,讀取原始點云數據,并將點云三維坐標存儲在一維數組中,獲取所有數據點的位置極值坐標,模擬出一個平行于坐標系的長方形包圍盒,因此包圍盒內包含所有原始數據點,并根據公式(1)將其分割成若干個邊長為L的小立方體[6]。
(1)
式中,h為網格比例因子,取值范圍在1.0~1.5之間;N為全部點云數量。
設虛擬包圍盒的最小坐標(xmin,ymin,zmin)和最大坐標(xmax,ymax,zmax)。其中,小立方體的在三個方向的個數分別為
(2)
(3)
(4)
1.2 判斷小立方體的點云數據
在三維點云數據和它的編號之間構建一個確定的并與之對應的哈希函數,使每個編號與唯一的小立方體相對應。假設原始數據點云的任意一點P的坐標為(Px,Py,Pz),則
(5)
(6)
(7)
其中,I,J,K分別是該點對應的小立方體的編號。散亂點云格網化后,將對三維空間中懸浮在樣本點之外的、散亂稀疏的噪點剔除,采用的方法是判斷每個小立方體中的數據點個數,如果數量小于規定的閥值,則清空此立方體的數據。
實驗中,將某點云數據導入到MATLAB中顯示,如圖1所示。由于外界原因,激光掃描儀將噪點保留,通過格網閥值法將點云數據的偏離樣本點較遠的數據點剔除,剔除后的結果如圖2所示。
圖2 用格網法去除第一類噪點效果
2 第二類噪點去除算法
在第一類劃分網格的基礎上,按順序搜索點云數據中小立方體是否有數據點,如果有數據點個數不為零,則以此立方體為中心,搜索周圍立方體中包含數據點的立方體。如果存在這樣立方體再依次以周圍立方體為中心,搜索其周圍立方體,直到所有立方體被查看完。找出屬于同一相鄰立方體并存在數據點的點云,通過對比不同點云的數據點個數,保留最多的點云,剔除距離大片點云較遠的密集點云,即第二類噪點。圖3為用格網法去除第二類噪點效果。
圖3 用格網法去除第二類噪點效果
3 第三類噪點光順算法
本文將雙邊濾波算法引進到三維光順點云數據當中,以此來光順第三類噪點。
3.1 圖像中的雙邊濾波算法
雙邊濾波算法(BLT)首先應用在濾除二維圖像噪聲點,Fleishman等人用周圍點灰度值的加權平均來代替當前點的灰度值[7],該方法簡單有效并且在保持圖形的基本特征的同時,達到光順目的。
二維圖像的雙邊濾波算法[8]的基本公式為
(8)
式中,q為像素點,N(q)為q的相鄰像素集合;k是q的相鄰像素點;(║q-k║)是像素q與相鄰的像素k之間幾何距離;L(q)為像素q的灰度值;(|L(q)-L(k)|)是像素q與相鄰的像素k之間灰度的相似性;Wc和Ws都是高斯函數。
3.2 三維點云樣件的雙邊濾波算法
三維雙邊濾波方法用于光順三維點云數據,以此來光順點云數據中小尺度的噪點。重新定義
q∶=q+an
(9)
式中,q為原始數據點;q:為光順后的數據點;n是q的法失方向;a是雙邊濾波權因子,定義為
(10)
(11)
(12)
式中,Wc類似于二維圖像中的雙邊濾波權函數,稱為空間域(距離)權重;Ws為用來捕捉領域點之間的法向的變化,稱為特征域權重或影響權重[9];c和s為切平面上的高斯核函數的濾波系數,分別代表了某一點的雙邊濾波函數值的切向量和方向量的影響范圍。其中,c為原始數據點q到領域點的距離對該點的影響因子,s為原始數據q到領域點的距離向量在該點法失方向上的投影對于原始數據點的影響因子。c為點領域半徑,不同的s的取值影響最終的光順效果,常見的s為鄰域點的標準偏差。σs為空域高斯函數的標準差,σr為值域高斯函數的標準差。
3.3 雙邊濾波算法及光順步驟
(1)任意數據點qi的m個相鄰點kij,j=1,2,3,…,m;
(2)求出相鄰點的光順濾波函數的幾何距離║qi-kij║,即數據點qi到相鄰點kij的幾何距離;
(3)求出保持權重函數的內積參數
(4)依據距離權重和特征域權重公式計算出雙邊濾波函數;
(5)將(4)中的Wc和Ws代入雙邊濾波權因子公式,求出C;
(6)用新數據點替代原始數據點 ;
(7)循環完成所有數據點的更新,保存結果,程序結束。
三維雙邊濾波函數的幾何距離及Wc和Ws的MTALAB計算算法:
y(j)=dot(normal(i,:),points(i,:)-points(indx(i,j),:));
wc(j)=exp(-(dist(i,j)^2)/(2*mc^2));
ws(j)=exp(-y(j)^2/(2*ms^2));
d1(i)=d1(i)+wc(j)*ws(j)*y(j);
d2(i)=d2(i)+wc(j)*ws(j);
4 算法的實現過程
(1)首先通過對原始的點云數據的預處理進行極大極小點云的剔除,縮小去噪的運算時間。
(2)在XOY平面坐標系內,找出X坐標和Y坐標的極值點,然后模擬出一個平行于坐標系的長方形包圍盒,判斷其格網點云數量,對少于閥值的格網進行清空,完成第一類噪點的去噪。
(3)利用區域增長思想[10],搜索三維點云中每個小立方體是否存在數據點,如果某個立方體有數據點,并以此為中心繼續搜索,直到網格都被搜索。再判斷網格是否相鄰,找出相鄰點云的最大點云數量。除去其他點云,完成第二類噪點的去噪。
(4)改進二維圖形雙邊濾波器,運用三維雙邊濾波原理去光順(3)中的噪點數據。完成第三類噪點的去噪。
5 實驗分析與評定
5.1 實驗數據
為驗證本文算法的效果,用手持三維激光掃描儀對某鐵礦測量件進行三維數據測量實驗,獲取鍛鑄件的原始點云數據,如圖4所示。其設備分辨率為0.4mm×0.5mm×0.4mm,獲得約220 332個高密度數據點。數據處理實驗在Matlab2014環境下進行,新建硬件平臺為280 Hz處理器、512 MB內存。

圖4 手持3D掃描儀獲取鍛鑄件原始點云數據
考慮到目前某軟件應用較為廣泛[11],將本文算法輸出結果與其進行比較。其應用原理是用許多細小的空間三角形來逼近還原CAD實體模型,采用NURBS曲面片擬合出NURBS曲面模型。
5.2 實驗結果分析
根據上述方法對點云數據進行分析,達到了預期效果。其中,圖5為沒有處理的原始點云數據和某軟件數據處理效果。圖6為應用MATLAB采用本文算法濾波效果。圖7、圖8為原始點云重建結果和光順后的點云重建結果。
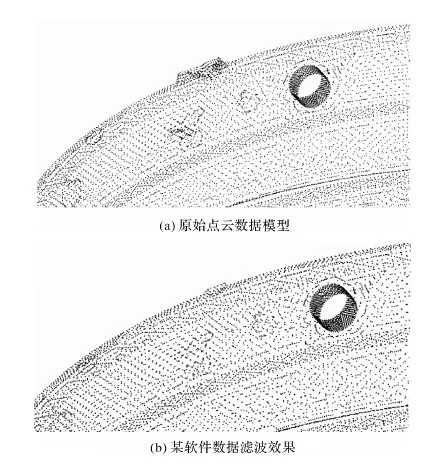
圖5 數據濾波前后三維效果圖
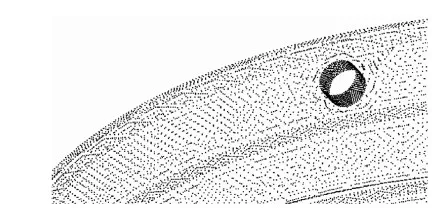
圖6 應用MATLAB采用本文算法濾波效果
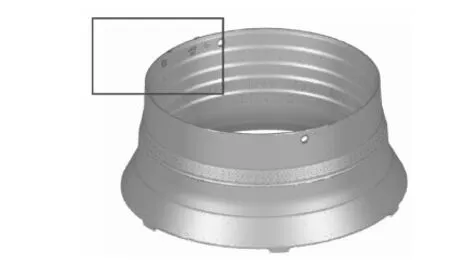
圖7 原始點云重建結果
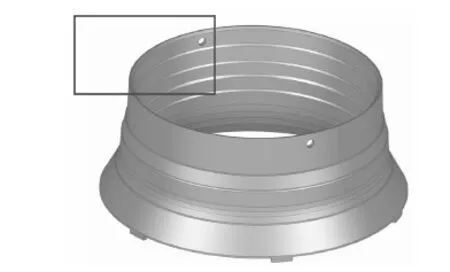
圖8 光順后點云重建結果
5.3 評定標準
對于去噪光順算法的評定是一個新的研究方向,在數據處理中扮演重要角色,是檢驗方法可行性的重要條件。目前,去噪光順算法的評定主要有目視檢查法、隨機抽樣檢查法[12]、定性評價[13]、交叉表分析法、Kappa系數法和平均二次距離誤差法。
(1)交叉表分析法[14]。交叉表(交叉列聯表)分析法是一種以表格的形式同時描述兩個或多個變量的聯合分布及其結果的統計分析方法。基于表1的評價系統,按照Ⅰ類誤差、Ⅱ類誤差和總誤差進行定量分析。具體如下:
Ⅰ類誤差是指樣件點錯分為非樣件點的概率,用b/a表示;
Ⅱ類誤差是指非樣件點錯分為樣件點的概率,用c/f表示;
總誤差是指分類結果與參考數據不一致的概率,用(b+c)/n表示。
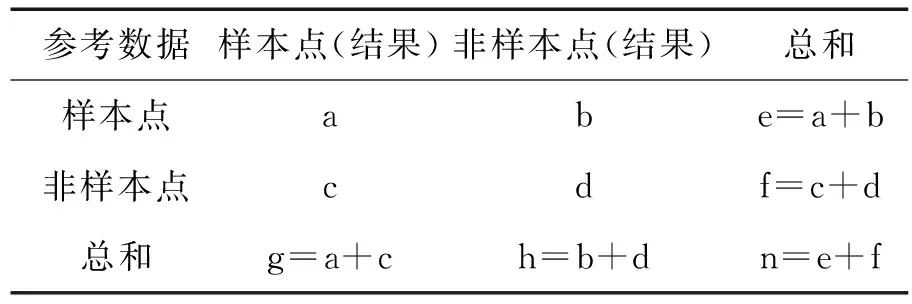
表1 交叉表
其中,a表示算法正確分類的樣本點個數,b表示樣本點誤判為非樣本點的個數,c表示非樣本點誤判為樣本點的個數,d表示算法正確的分類的非樣本點個數,e和f分別表示參考數據中樣本點和非樣本點個數;g和h分別表示去噪光順結果中樣本點和非樣本點個數。
在實際情況下,零件的表面情況比較復雜,通常通過調整實驗參數,對比實驗結果,選擇較小的Ⅰ類誤差。總誤差是衡量Ⅰ類誤差和Ⅱ類誤差錯誤總數的標準,所以通過對比總誤差,選擇較為合適的數據。統計處理前后的去噪指標如表2所示,本文方法的Ⅰ類誤差相對Ⅱ類誤差較大,說明在數據濾波時,要盡可能保證樣件結構特征、保證點云數據數量的同時,也要達到去除噪點和光順的目的。
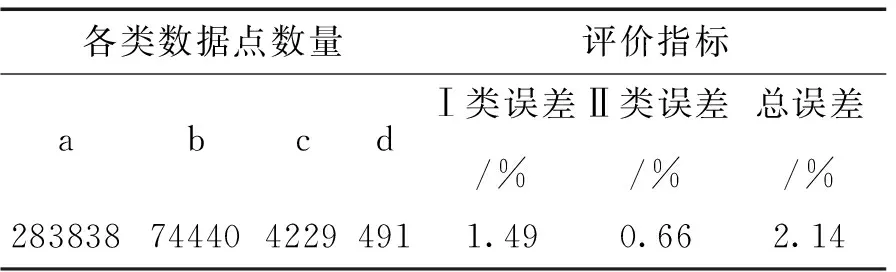
表2 交叉表分析法分析實驗數據結果
(2)Kappa系數法。kappa系數[15-16]是一種檢查分類評價一致性的計算精度方法。它是通過把所有地表真實分類中的像元總數乘以混淆矩陣對角線的和,再減去某一類地表真實像元總數與被誤分成該類像元總數之積對所有類別求和的結果,再除以總像元數的平方差減去某一類中地表真實像元總數與該類中被分類像元總數之積對所有類別求和的結果所得到的。Kappa系數與分類結果和參考數據的吻合度成正比。Kappa系數定義如下:
(13)
計算得到Kappa=0.94,表明實驗方法得出的分類結果與參考數據緊密吻合。

(14)
此方法適用于多次迭代雙邊濾波器,在分析Bunny等模型雙邊濾波時,可以體現多次迭代雙邊濾波收斂特性,但多次迭代對于不同的鍛鑄件可能造成過于光順現象。
6 結束語
本文提出一種格網閥值法和雙邊濾波器相結合的分類去噪方法,通過實驗驗證了該方法的有效性,得出結論。
(1)在原始點云光順之前,采用格網法有效的去除噪點,為后續光順處理奠定基礎,有效保證數據的完整性。
(2)對實驗數據應用本文算法和某商業軟件進行對比實驗,結果證明本文的算法能夠很好的去除噪點的同時,還能保證數據樣點的結構特征。
(3)對去噪效果評價的指標進行匯總,對實驗結果進行定量的評價,結果顯示評價指標在允許誤差范圍內,說明算法已經達到預期的效果。
[1] 趙燦,董剛,程俊廷.利用噪聲特點與曲面擬合的點云去噪及光順算法研究[J].現代制造工程,2008(06):90-93.
[2] 劉輝,王伯雄,任懷藝等.基于三維重建數據的雙向點云去噪方法研究[J].電子測量與儀器學報,2013,27(01):1-7.
[3] 王麗輝,袁保宗.魯棒的模糊C均值和點云雙邊濾波去噪[J].北京交通大學學報,2008,32(02):18-21.
[4] 梁新合,新晉,郭成, 等.散亂點云的補償濾波[J].西安交通大學學報,2011,45(11):91-95.
[5] 宋陽,李昌華,馬宗方,等.應用于三維點云數據去噪的改進C均值算法[J].計算機工程與應用,2015,51(12):1-4.
[6] LES APIEGI,WAYNE THLLER.Algorithm for Finding All k Nearest Neighbors [J].Computer-Aided Design,2002,34:167-172.
[7] Fleishman S,Drori I,Cohen-Or D.Bilateral mesh denoising [J].ACM Transcations on Graphics,2003,22(03):950-953.
[8] JIN Ming , SONG Jian-zhong.An adaptive bilateral filtering method for image processing [D]. Opto-Electronic Engineering,2004,31(07):65-68.
[9] 杜小燕,姜曉峰,郝傳剛, 等.點云模型的雙邊濾波去噪算法[J].計算機應用與軟件,2010,27(07):245-247.
[10]曹爽,岳建平,馬文.基于特征選擇的雙邊濾波點云去噪算法[J].東南大學學報,2013,43(02):351-354.
[11]TU QUN-ZHANG ZHAO JIAN-XUN DAI JV-YING. A Method of Reverse Modeling of Equipment Parts by Combining Geomagic Studio and Pro/Engineer [J]. 2011 International Conference on Computer Science and Logistics Engineering,ZhengZhou, 2011:366-370.
[12]周駿,陳雷霆,劉啟和, 等. 基于序貫概率及局部優化隨機抽樣一致性算法[J].儀器儀表學報,2012,33(09):2037-2044.
[13]高志國.海量點云數據濾波處理方法研究[J].測繪工程,2013,22(01):35-38.
[14]胡永杰,程朋根,陳曉勇, 等.機載激光雷達點云濾波算法分析與比較[J].測繪科學技術學報,2015,32(01):72-77.
[15]MENG,WANG,SILVAN-CARDENAS,et al.A Multi Dir-ectional Ground Filtering Algorithm for Airborne Li-DAR[J]. Photogrammertric Engineering and Remote Sensing,2009,64(01):117-124.
[16]SHAO YICHEN,CHEN LIANGCHIEN.Automated Sea-rching of Ground Points From Airborne LiDAR Data Using a Climbing and Sliding Method [J].Photogra-mmertric and Remote Sensing,2008,74(05):625-635.
Study on denoising and smoothing method of 3D-scaning point cloud data tothe large complex malleable cast parts
ZHENG Peng, HUO Hong-xu, JIANG Xing-yu
(Mechanical Engineering Department,Shenyang University of Technology,Shenyang 110870, China)
Reverse engineering is the key part to obtain dimensions of complex parts for the processing of three-dimensional point cloud data of malleable cast parts. The key point is how to get the noiseless and smooth 3D point cloud from the scattered and multi-noise point cloud data. According to characteristics of noise points in the scattered cloud, this paper presents two methods: step-by-step denoising and smoothing method. First, the first kind of noise is removed by using grid threshold method. Second, the second kind of noise is removed by using virtual grid method. Finally, the above data is smoothed by using bilateral filtering method. The results show that the method not only removes the noisy points of 3D point cloud data, but also obtains a smooth measurement of surface and retains the characteristics of sharp features.
3D laser scanning; data processing; data filtering; denoising; smoothing; malleable cast parts
2016-10-09;
2016-12-18
國家自然科學基金項目(NO.51305279)
鄭鵬(1964-),男,教授,主要研究方向為現代制造技術與測量、數控制造技術、機械成套設備設計與開發。
霍洪旭(1990-),男,碩士生,主要研究方向為三維掃描測量與三維建模。
P204
A
1001-196X(2017)03-0023-06
