GNSS接收機內部噪聲水平檢測方法研究
2017-07-18 11:24:38高知明
中國測試 2017年4期
胡 寧, 高知明, 周 勇,4
(1.南京信息工程大學電子與信息工程學院,江蘇 南京 210044;2.南京市計量監督檢測院,江蘇 南京 210037;3.江蘇北斗衛星導航檢測中心有限公司,江蘇 南京 210032;4.江蘇省氣象傳感網技術工程中心,江蘇 南京 210044)
GNSS接收機內部噪聲水平檢測方法研究
胡 寧1,2,3, 高知明1, 周 勇1,4
(1.南京信息工程大學電子與信息工程學院,江蘇 南京 210044;2.南京市計量監督檢測院,江蘇 南京 210037;3.江蘇北斗衛星導航檢測中心有限公司,江蘇 南京 210032;4.江蘇省氣象傳感網技術工程中心,江蘇 南京 210044)
GNSS接收機的定位精度在進行性能評估時必須進行內部噪聲水平檢測必不可少。該文利用多載體導航信號模擬器仿真導航信號,作為高精度的標準信號源,在對多臺GNSS接收機內部噪聲水平檢測時播發同一信號源,運用零基線法對GNSS接收機鑒定。通過檢測實例表明,利用多載體導航信號模擬器進行接收機內部噪聲水平檢測合理、可信,檢測速度快速有效且符合接收機內部噪聲水平檢測要求。
GNSS接收機;內部噪聲水平;零基線法;多載體導航信號模擬器
0 引 言
GNSS泛指全球衛星導航系統,常見系統有GPS、BDS、GLONSS和GALILEO衛星導航系統,隨著全球衛星導航系統的快速發展,衛星產品產業化不斷加快,市場對GNSS接收機的需求也日益增大,同時對GNSS接收機的性能要求也越來越高。GNSS接收機的性能好壞直接影響著全球衛星導航系統的應用和發展,因此對GNSS接收機進行檢測并做出合理的評估對全球衛星導航系統的建設和發展有著十分重要的意義[1]。內部噪聲水平的好壞是評價GNSS接收機性能的重要指標,GNSS接收機內部噪聲水平(receiver interior noise level)是 GNSS 接收機信號通道間的偏差,延遲鎖相環、碼跟蹤環的偏差,以及鐘差等引起的測距和測相誤差的綜合反映[2]。GNSS接收機的內部噪聲水平檢測方法有超短基線法和零基線法,這兩種檢測方法主要依據BD 420009——2015《北斗/全球衛星導航系統(GNSS)測量型接收機通用規范》與CH 8016——1995《全球定位系統(GPS)測量型接收機檢定規程》。通常GNSS接收機內部噪聲水平檢測需要特定的檢測場地,對于同批號待檢數量較多的接收機,由于條件的限制使得接收機檢測環境有所差異且效率較低。本文提出一種利用多載體導航信號模擬器進行GNSS接收機內部噪聲水平檢測,通過模擬器仿真多星座任意頻點組合的導航信號,對同批號多臺接收機檢測時播發同一信號源。
1 接收機內部噪聲水平檢測方法
1.1 相對定位基本原理
GNSS系統的定位方法是通過測量衛星位置到接收機之間的距離,然后依據多顆衛星的觀測數據解算出接收機具體位置。由于測碼偽距在測量時定位精度比載波相位誤差較大,而在工程測量時往往希望獲得高精度的定位數據,因此采用載波相位進行測量[3]。
載波相位的原始觀測方程可表示為

tA——接收機鐘差;
tP——衛星鐘差;
c——真空中光速;
λ——載波相位波長,λ=f/c;每個變量的上標為衛星編號,下標為接收機編號。

式(2)是在理想環境中衛星P空間位置到接收機A之間距離的觀測方程,其中[XP,YP,ZP]為衛星在空間中的位置矢量,[XA,YA,ZA]為接收機在測站的待定量,為衛星到接收機間的距離。
在相對定位時,為了獲得高精度的定位結果,將載波相位觀測值直接相減即形成衛星間求差、接收機間求差、歷元間求差3種方式[4]。在實際應用中往往考慮到衛星鐘差和接收機鐘差的影響,而采用接收機間求差方式,可得接收機A、B間的單差載波相位觀測方程為

式(3)是接收機間單差方式,這種單差方式消除了衛星鐘差的影響,同時也對衛星軌道誤差、以對流層為主的中性大氣延遲誤差和電離層延遲誤差的影響也可大大降低[5]。
為了進一步消除在定位過程中帶來的各種誤差,采用雙差方式,在接收機間和衛星間進行二次求差,可得接收機A、B與衛星P、Q的雙差載波相位觀測方程為

雙差載波相位觀測值消除了衛星鐘差和接收機鐘差的影響,在A、B兩個接收機之間距離較近且周圍環境相似時,這種雙差方式可以極大消除大氣延遲誤差及衛星軌道誤差帶來的影響,可以得到更好的定位結果。
1.2 零基線檢測方法
GNSS接收機內部噪聲水平檢測主要運用零基線法,它主要是檢測接收機鐘差、信號通道時延、延遲鎖相環及機內噪聲等電性能對接收機定位精度影響大小一種有效方法[6]。零基線法利用接收機接收同一衛星信號進行載波相位觀測值間求差,其雙差差值理論上為0,因此零基線法是指多臺接收機分別接收同一功率分配器輸出的衛星信號且信號的功率、相位等同,隨意選擇兩臺接收機設備進行雙差載波相位觀測數據求差,解算出相應的基線向量,以檢測儀器固有誤差[7]。
零基線檢測步驟:
1)選擇周圍高度角10°以上無障礙物的開闊地方安放天線,按圖1連接功率分配器。
2)打開電源,接收機在靜態測量模式下同步接收4顆以上衛星不少于30min。
3)用靜態軟件計算坐標增量和基線長度,其誤差應小于1mm[8]。
1.3 超短基線檢測方法
GNSS接收機在進行內部噪聲水平檢測時,在無功率分配器的條件下可采用超短基線法檢測內部噪聲水平,超短基線法對內部噪聲水平的檢測也是一種相對定位法對接收機定位精度的檢測。超短基線法選擇在周圍高度角10°以上無障礙物的場地并無電磁波干擾及地面反射系數小。將接收機天線整平對中放置在觀測墩上且同步測試。
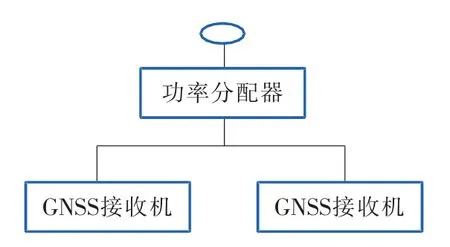
圖1 零基線檢測示意圖
超短基線檢測步驟:
1)在標定的場地內接收機天線必須安置在觀測墩北方向。
2)接收機開機接收同步衛星信號,同步衛星必須4顆以上連續接收1.5h。
3)用GNSS數據處理軟件計算,解算出的基線向量值與大地測量的標準值之間差值應小于接收機固定規格。
1.4 內部噪聲水平檢測方法分析
GNSS接收機在進行相對定位時產生的誤差主要來源于載波相位觀測數據,因此載波相位觀測數據質量的好壞直接影響著接收機性能的優越,是接收機的重要指標。零基線法和超短基線法依據相對定位原理采用雙差載波相位方式對觀測數據進行解算。
零基線法的解算依據上式(1)~式(4),它消除了電離層和對流層延遲誤差、衛星軌道誤差、多路徑效應誤差、載波相位觀測噪聲、天線相位中心偏差誤差等,零基線檢測法可以較為真實地反映接收機的質量水平,從檢測方法上分析多臺接收機接收的信號由同一臺天線傳輸,因此零基線法消除了天線對觀測數據的影響[9-10]。
在檢測主機與天線固定在一起的GNSS接收機采用超短基線法,但此方法無法消除天線相位中心偏差誤差和GNSS接收機對中誤差的影響,同時在雙差定位時載波觀測模型的解算也殘留著相關誤差的殘差。
2 儀器檢測實例與數據分析
本次檢測采用多載體導航信號模擬器,它能夠根據運動載體的動態特性等各種因素對衛星信號的影響,精確模擬高動態包括GLONASS、GPS和BDS等混合星座任意頻點組合的導航信號。依據我國最新發布的JJF 1471——2014《全球導航衛星系統(GNSS)信號模擬器校準規范》和BD 420012——2015《北斗/全球衛星導航系統(GNSS)信號模擬器性能要求及測試方法》對此次使用的GNS8450多載體導航信號模擬器校準,表1為多載體導航信號模擬器性能與BD 420012——2015專項標準指標對比。可以看出GNS8450多載體導航信號模擬器仿真的導航信號符合我國規定要求,因此GNS8450模擬器可以作為高精度的標準信號源,提供高穩定度的標準1PPS脈沖信號和10MHz時鐘信號,并且能夠滿足各類多終端協同導航測試的應用需求,目前是GNSS接收設備測量首選計量儀器[11]。
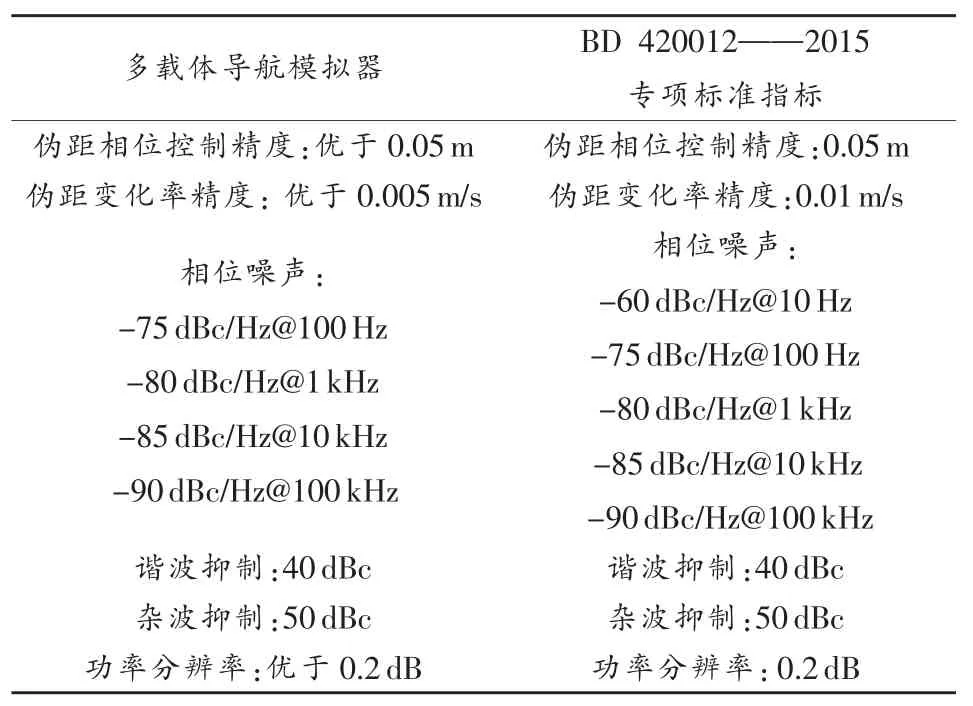
表1 多載體導航信號模擬器性能與BD 420012——2015專項標準指標對比
本次采用GNS8450多載體導航信號模擬器支持 BDS(B1、B2、B3)和 GPS(L1、L2)5 個頻點任意頻點間隨機組合信號輸出,同時檢測接收機采用上海司南研發的M300 Pro接收機,此型號接收機完全支持多載體導航信號模擬器仿真的5個頻點,可同時跟蹤14顆衛星,利用M300 Pro接收機對衛星信號進行數據采集。
本次檢測采用零基線法對GNSS接收機內部噪聲水平檢測,將2臺接收機分別接至功率分配器2個輸出端口,在檢測中多載體導航信號模擬器直接將衛星信號輸出至功率分配器,然后通過功率分配器等功率、相位傳輸給接收機,如圖2所示。
在多載體導航信號模擬器檢測平臺上,首先將多載體導航信號模擬器通過本地控制軟件界面設置后,下發星歷數據,確定下發完畢指示信號后,等待仿真計算機仿真命令,仿真計算機開始仿真后實時將載體運動數據通過光纖傳輸給模擬器,信號處理模塊將產生的GNSS中頻信號輸入到射頻板,再將模擬器射頻輸出的衰減信號與功率分配器對接[12]。由于本次檢測是對GNSS接收機內部噪聲水平檢測,衛星信號質量越好使得接收機定位精度越高,更加體現接收機性能的優越,但是接收機在日常工作中往往會受到各方面的干擾,因此在對仿真環境星座參數編輯時,使用多種仿真效應模型,如:對流層模型和電離層模型。
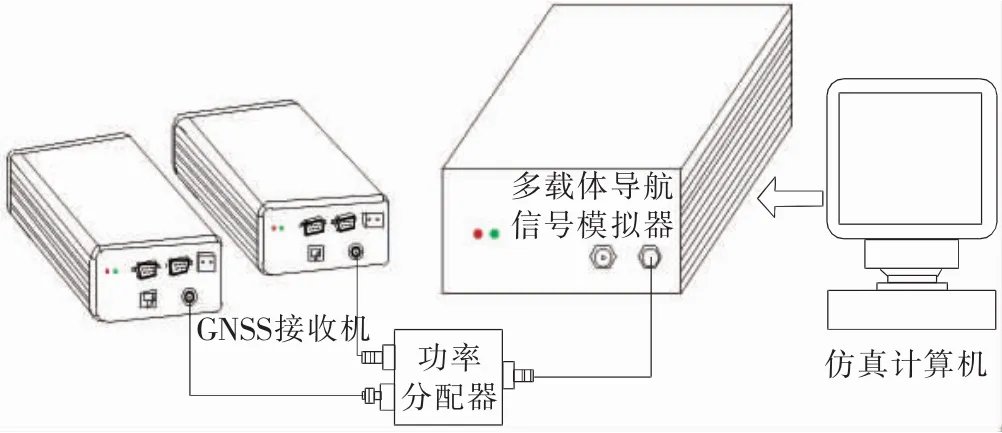
圖2 接收機閉環仿真系統框圖
利用多載體導航信號模擬器在對衛星信號靜態觀測數據的采集時,衛星天空分布圖如圖3所示。
運用GNSS數據處理軟件對各接收機采集的衛星原始觀測數據進行靜態基線處理,根據BD420009——2015規定:在接收機內部進行噪聲水平檢測時,接收機連續采集數據時間不少于30min且觀測數據靜態解基線向量長度在1mm以內,則認為接收機內部噪聲水平滿足檢測要求[13]。表2為9組接收機靜態基線處理結果,在表中直觀的看出利用多載體導航信號模擬器對接收機內部噪聲水平檢測所采集的靜態解基線向量長度均小于1mm。
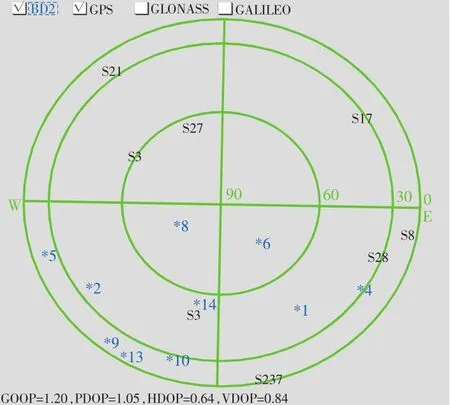
圖3 觀測時段衛星天空分布圖

表2 9組接收機靜態基線處理結果
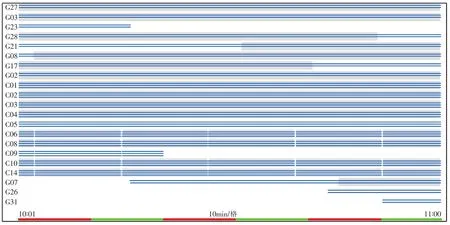
圖4 第1組接收機零基線觀測數據質量
圖4 是第1組接收機零基線雙差定位殘差,圖中大寫字母C、G分別代表BDS和GPS(下文字母含義一致)。由圖可知雙差定位殘差值很小,GPS衛星雙差定位殘差最大值為5mm,而BDS衛星雙差定位殘差最大值為18 mm,根據雙差殘差可以明顯分析出GPS觀測數據質量優于BDS觀測數據質量。如圖5所示,靜態基線GPS觀測數據質量較好沒有出現周跳現象,BDS觀測數據質量較差明顯出現周跳現象。
載波相位觀測值精度根據雙差觀測量殘差分析:第1組接收機觀測值精度很高,其中GPS觀測值精度高于BDS觀測值精度,如表3所示,GPS/BDS水平精度和垂直精度均符合標準要求。通過上述結果表明,雙差觀測量殘差的高低直接影響著觀測數據質量的好壞,對觀測值精度的計算起到決定作用。接收機內部噪聲影響了GPS/BDS載波相位觀測數據導致雙差觀測量殘差參差不齊,但內部噪聲的影響較小,GPS/BDS頻點殘差變化幅度不大。
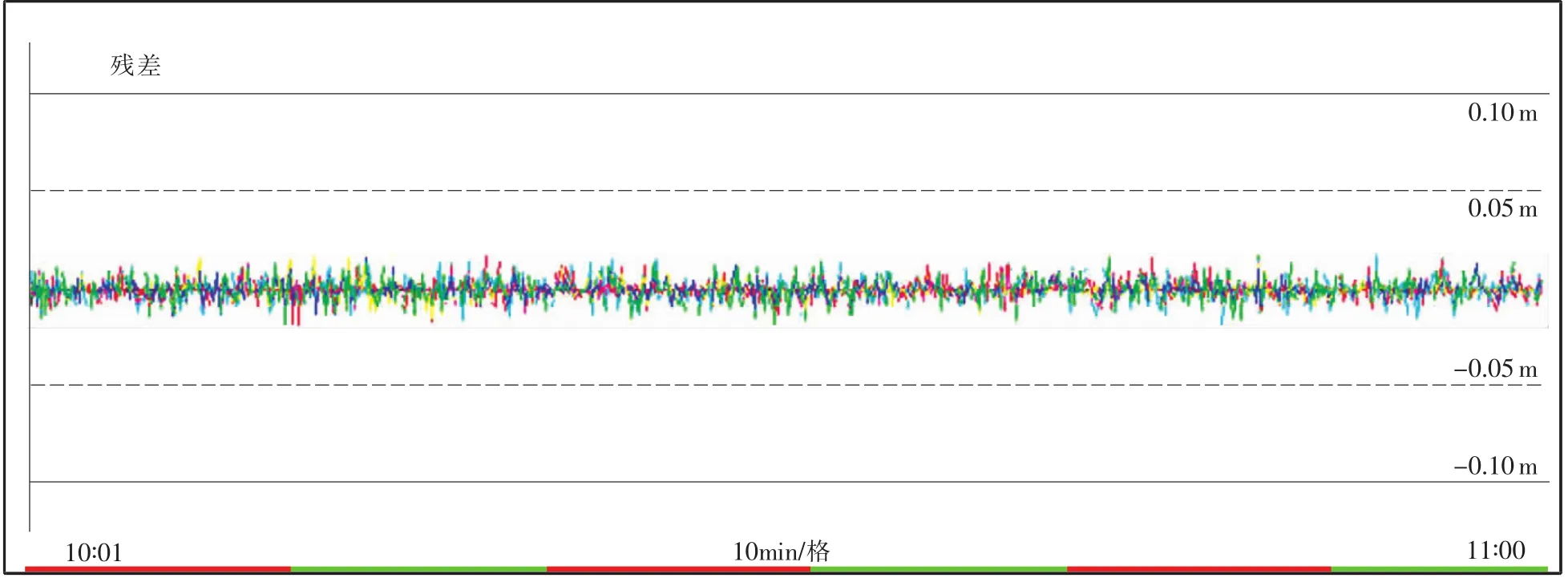
圖5 第1組接收機零基線雙差定位殘差

表3 第1組接收機靜態基線觀測值精度
3 結束語
隨著全球衛星導航系統的快速發展,GNSS接收機性能的檢測越來越重要,它必須符合國家規定要求。內部噪聲水平的檢測是GNSS接收機主要的檢測項目之一,本文采用多載體導航信號模擬器對接收機內部噪聲水平檢測,該方法可重現復雜的效應場景對同批號接收機進行檢測,這在已有的檢測方法中是無法實現的。通過檢測實例,驗證了的多載體導航信號模擬器檢測方法的有效性,該方法不但科學、客觀的反映了接收機內部噪聲水平,而且還提高了檢測效率。
[1]羅海美,劉廣軍,劉旭東.GNSS接收機內噪聲水平檢測評價方法研究[J].電子測量技術,2015,38(1):34-37.
[2]北斗/全球衛星導航系統(GNSS)測量型接收機通用規范:BD 420009-2015[S].北京:中國衛星導航系統管理辦公室,2015.
[3]張銳,蔡艷輝,翟清斌.現代GNSS接收機內部噪聲水平評定[J].中國計量,2010(12):97-99.
[4]高成發,趙毅,萬德鈞.GPS載波定位中雙差觀測值權的合理確定[J].測繪科學,2005,30(3):28-32.
[5]祝會忠.長距離單元非差GNSS網絡RTK理論呢與方法 [M].北京:中國測繪出版社,2014:14-38.
[6]蘇玉瑞,姬洪亮,王曉南.GPS接收機內部噪聲水平測試方法研究[J].測繪與空間地理信息,2014,37(12):118-119.
[7]杜娟,張會,劉星,等.基于零基線的GPS/BD2兼容接收機精度檢測方法研究[J].艦船電子工程,2013,33(7):121-123.
[8]全球定位系統(GPS)測量型接收機檢定規程:CH 8016-1995[S].北京:國家測繪局,1995.
[9]AMIRI-SIMKOOEI A R,TIBERIUS C C J M.Assessing receiver noise using GPS short baseline time series[J].GPS Solutions,2007,11(1):21-35.
[10]LANGLEY R B.GPS receiver system noise[J].GPS World,1997,8(7):40-45.
[11]劉志國.衛星導航信號模擬器研究與實現[D].太原:中北大學,2014.
[12]寇艷紅,常青,張其善.高動態GPS模擬器閉環測試系統結構與軟件設計[J].北京航空航天大學學報,2004,30(6):534-538.
[13]高曉,戴吾蛟,李施佳.高精度GPS/BDS兼容接收機內部噪聲檢測方法研究 [J].武漢大學學報 (信息科學版),2015,40(6):759-799.
(編輯:劉楊)
Study on the internal noise level detection method of GNSS receiver
HU Ning1,2,3,GAO Zhiming1,ZHOU Yong1,4
(1.School of Electronics and Information Engineering,Nanjing University of Information Science and Technology,Nanjing 210044,China;2.Nanjing Institute of Measurement and Testing Technology,Nanjing 210037,China;3.Jiangsu Beidou Satellite Navigation Testing Center Co.,Ltd.,Nanjing 210032,China;4.Jiangsu Technology and Engineering Center of Meteorological Sensor Network,Nanjing 210044,China)
In performance evaluation,GNSS receiver positioning accuracy is essential for testing of the internal noise level.The research uses multi-carrier navigation signal as a high-precision standard signal,and broadcasts the same signal source when detecting the internal noise level of multiple GNSS receivers,then uses the zero-baseline method to identify the GNSS receivers.By testing samples,it is more reasonable and feasible to detect the receiver’s internal noise level with multi-carrier navigation simulator.Compared with the traditional method,the proposed method is faster,more effective and can satisfy the requirements of the receiver’s internal noise level.
GNSS receiver; internal noise level; zero baseline method; multi-carrier navigation signal simulator
A
1674-5124(2017)04-0028-05
10.11857/j.issn.1674-5124.2017.04.007
2016-09-12;
2016-11-03
胡 寧(1967-),男,江蘇南京市人,高級工程師,碩士,主要從事衛星導航產品檢測技術研究。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
海峽科技與產業(2016年3期)2016-05-17 04:32:12
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
