基于蒙特卡羅的移動傳感網節點定位跟蹤算法
2017-07-18 11:48:46石研楊文忠高秋田李雙雙韓玄
現代計算機 2017年14期
石研,楊文忠,,高秋田,李雙雙,韓玄
(1.新疆大學軟件學院,烏魯木齊 830008;2.新疆大學信息科學與工程學院,烏魯木齊 830046;3.國網新疆電力公司吐魯番供電公司,吐魯番 838000)
基于蒙特卡羅的移動傳感網節點定位跟蹤算法
石研1,楊文忠1,2,高秋田1,李雙雙2,韓玄3
(1.新疆大學軟件學院,烏魯木齊 830008;2.新疆大學信息科學與工程學院,烏魯木齊 830046;3.國網新疆電力公司吐魯番供電公司,吐魯番 838000)
針對傳統蒙特卡羅定位算法(MCL)存在的需要大量樣本才能得到較好定位效果,導致的算法需要較長的計算時間以及較高的能源消耗的問題,提出IMCL算法,通過免疫計算加快預測階段樣本的抽樣,減少定位時間,降低能耗;使用插值法預測節點的運動速度和方向,縮小采樣區域,提高采樣效率。實驗仿真表明提出的IMCL算法和MCL算法相比定位時間減少30%左右,定位誤差降低約10%。
無線傳感器網絡;移動節點;定位;蒙特卡羅算法;遺傳算法
第二項會議議程為“攻克技術難關”。學生按興趣分為研討種子繁殖和研討嫁接繁殖的小組。每個小組將會通過合作探究的學習模式領會各種繁殖方式的要領,并進行動手實踐操作和小組成果分享。
0 引言
無線傳感器網絡(Wireless Sensor Networks,WSNs)是由部署在監測區域中的大量具有感知、計算和通信能力的傳感器節點通過自組織和多跳的方式構成的無線網絡,是物聯網的一種主要形式[1]。在WSNs的許多應用中節點位置至關重要,如果沒有位置信息,感知的數據是沒有意義的[2]。在過去的幾年時間里,提出了很多的WSNs節點定位算法,按照定位時是否需要測量節點之間的實際距離,這些算法大致可以分成2類,分別是基于測距的和無須測距的定位算法。基于測距的定位算其中有基于接收信號強度(Received Signal Strength Indication,RSSI)定位方法[3],基于信號到達時間差(Time Difference of Arrival,TDOA)定位方法[4]等;無須測距的定位算有質心定位算法[5]、DV-Hop(Distance Vector-Hop)定位算法[6]等。
上述算法適用于靜態傳感器網絡,在很多應用如牧區牲畜監測跟蹤等,節點在部署后可能會移動形成移動傳感器網絡,節點的移動造成很多現有的靜態定位算法并不適用。因此,設計移動WSNs節點定位算法很有必要。2004年L.Hu和D.Evans提出了MCL(Monte Carlo Localization)算法[7],算法利用節點的移動性在提高定位精度的同時減小了定位代價,為WSNs移動節點的定位提供了新的思路。2008年Baggio[8]等人提出了蒙特卡羅箱(MCB)算法,算法通過建立錨箱(AnchorBox)減少候選樣本的抽取區域以提高采樣效率。雖然在定位效率和精度上有所提高,可是當觀測數據分布在錨箱的比重很小時,采樣成功率仍舊很低。在文獻[9]中,RudafshaniM和Datta S通過利用鄰居節點位置信息來提高定位精度,提出了MSL和MSL*算法,但是它們利用鄰居節點的方式比較復雜,都存在采樣效率低的問題。文獻[10]將測距信息引入到MCL算法中,提出了一種基于測距的MCL算法。雖然定位精度得到提升,但是節點卻需要配置額外的測距硬件,增加了網絡成本和能量消耗。文獻[11]考慮到移動WSNs中由于節點的移動造成網絡拓撲的變化,造成有些單個節點被完全孤立面臨沒有可用錨節點的情況,Hartung S等人提出通過使用磁力儀、加速計、陀螺儀來更新節點的位置估計。提出的算方法成功地解決錨節點信息缺失時的定位問題,大幅度降低了定位誤差。但卻需要增加很多額外的裝置,增加了網絡成本。
MCL算法需要獲得足夠的有效樣本來準確描述節點的位置分布,但是尋找這些樣本點的計算量是很大的,因此導致算法需要較長的計算時間以及較高的能源消耗。針對這一問題本文提出了IMCL(Improved MCL)算法,通過免疫計算加快預測階段的抽樣,減少定位時間,降低能耗;利用節點前幾個時刻的歷史位置信息,使用插值法預測節點的運動速度和方向,縮小候選樣本的抽取區,提高采樣效率。
1 MCL算法
在MCL算法中,時間被分成為若干等長的離散時間段,需跟蹤節點在每一個時間段都要對自身進行重定位。
在定位初始化階段,從布置區域中隨機的抽取N個樣本點形成初始的位置樣本L0={l10,l20,…,lN0}。然后重復預測階段和濾波階段對節點進行定位。以t時刻的定位過程為例進行說明。
全民皆兵的陣仗,令“頑固”的古城物業人員驚呆了,一見華為的人都掉頭跑。畢竟,從沒見過這么能死纏爛打軟磨硬泡的,還團伙作戰圍追堵截,簡直太可怕了。
1.1 預測階段
在MCL中,節點的移動被建模為馬爾科夫過程,節點在時刻t的位置lt僅由它在t-1時刻的位置lt-1決定。需跟蹤節點只知道自己的最大運動速度vmax,并不知道自身的移動速度和方向。所以,lt必然包含在以lt-1為圓心、以vmax為半徑的圓形區域內,且假設節點的速度在區間[0,vmax]上服從均勻分布。算法在該圓內反復抽樣,便可以通過t-1時刻的位置樣本集合Lt-1獲得t時刻的位置樣本集合Lt。因此,轉移分布函數為:
其中,d(lt|lt-1)表示lt與lt-1之間的歐氏距離。從這個分布函數可以看出,vmax的值越大,采樣區域越大,那么每一步的不確定性也就越多。
經過一段時間的實踐探索,金山區走出了一條以制度建設為基礎、以民主參與為重心、以法治方式為內核的,特點鮮明、群眾認可、成效顯著的精細化基層治理新路子。但同時,也還存在著一些需要進一步完善的問題。比如,基層法律服務的多部門工作銜接還不夠流暢,律師參與基層治理的機制還可以進一步完善,村規民約的修訂尚不夠精細等。
1.2 濾波階段
生物學中,遺傳算法中的交叉遺傳算子也稱為基因重組,其通過某種方式互換兩條染色體上某些位上的基因,從而形成新的染色體。本文主要用到兩種交叉免疫操作,分別是線性交叉免疫和矩形交叉免疫。濾波階段完成以后,首先從滿足濾波條件的樣本集中隨機的選取兩個樣本(xi,yi)和(xj,yj),(xp,yp)表示通過交叉操作產生的新的樣本坐標。線性交叉免疫如公式(4)所示,矩形交叉免疫如公式(5)所示。在式(4)中,為了獲得較好的效果,α一般從[0.1,0.9]之間隨機選取。在式(5)中,α和β是在0到1之間的隨機數。
(3)獨特的地域區位有助于打造特色專創師資團隊。廣西是少數民族集聚的省份之一,有著豐富的民族特色資源可供開發。2003年,中國-東盟建立戰略伙伴關系,南寧成為中國-東盟博覽會永久舉辦地,歷經15年的發展,“共建21世紀海上絲綢之路,構建中國-東盟創新共同體”成為新的活動主題,東博會已形成進出口相結合、投引資相結合、商品與服務貿易相結合、展會結合、經貿盛會與外交舞臺共舞以及經貿活動與文化交流相結合的特色。東博會的發展提供了更多的國際市場營銷、國際物流、國際貿易等市場機會,為就業創業提供了更豐富的崗位,也為特色的專創師資團隊打造指明了方向。
近年來,我國鐵路建設處于高速發展時期,新站處于建設過程的同時既有客站也在改造過程中。根據交通運輸部的統計數據,2016年中國鐵路總里程達到12.4萬公里,預計2020年達到20萬公里。據統計,公共建筑的全年電耗是居住建筑的10~15倍,而交通樞紐類建筑用能強度在公共建筑中位列第二,僅次于商業建筑。鐵路客運站作為交通樞紐的重要組成部分,具有建筑面積大、窗墻比高、人員流動性大、照明系統復雜等特點。上述特點都會在一定程度上增加候車室內的空調供暖負荷,由此進一步增加了對電能、天然氣、水等能源的消耗。因此,研究客運站中央空調系統的節能技術對鐵路系統節能降耗具有重要意義。

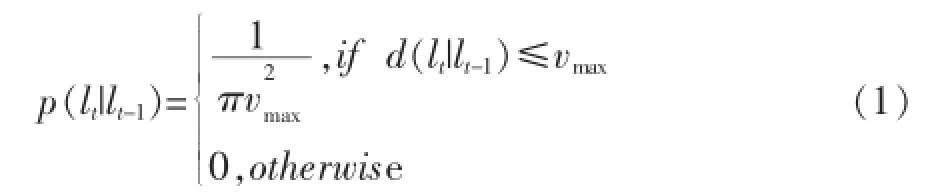
根據式(2),滿足條件的有效位置樣本點lt被保留,不滿足條件的位置樣本點被過濾掉,圖1(a)為節點的采樣區域圖,(b)為過濾圖。
3.1 實驗參數與評價指標
圖1 節點采樣區域和過濾圖
在濾波階段完成以后,如果得到的有效位置樣本點的數目小于N,那么將重復以上的兩個過程,直至獲得滿足條件的N個有效位置樣本點。如果過濾階段完成以后,得到了包含N個有效樣本點的位置樣本集Lt= {l1t,l2t,…,lNt},那么取這些樣本點位置坐標的平均值作為節點的估計位置,如公式(3)所示:

2 IMCL算法
本節首先介紹IMCL算法的預測階段和樣本免疫生成階段,最后對IMCL算法的整個流程進行描述。
如圖12中所示,紅色五角星代表節點當前的實際位置,圓點A和B表示兩個初始樣本點。點E和F為通過線性交叉免疫計算得到新的樣本,點G和H為通過矩形交叉免疫計算得到的新的樣本。與線性交叉相比,矩形交叉可以得到更多的可能位置,增加了樣本的多樣性,能夠防止算法退化的現象。當采用矩形交叉免疫時,新生成的樣本可能不滿足濾波條件,所以需要進行二次濾波處理。遺傳算法的使用使得MCL算法能夠通過較少的計算和能耗產生更多的樣本。
在預測階段使用牛頓二次插值法估算出節點當前時刻的運動速度和方向進。假設歷史記錄隊列中的前3個時刻的位置坐標分別(xt-3,yt-3),(xt-2,yt-2),(xt-1,yt-1)對x,y方向的數據使用牛頓插值可得:
Wind數據顯示,截至12月4日,滬深兩市仍有25只股票處于停牌狀態,其中有10只個股連續停牌天數已超過100個交易日。部分公司停牌時間甚至長達數年,*ST新億(600145.SH)以重組名義停牌已近3年,深深房A(000029.SZ)也停牌逾2年。

由此可估算出當前時刻的速度及方向為:
路面養護施工單位申請開工,并于2015年4月7日向社會發布施工公告。2015年4月19日,施工單位組織人員、材料、機械進場,具備開工條件,經審核于4月20日正式開工。

④每次對未知節點進行定位所需的樣本數為5000。
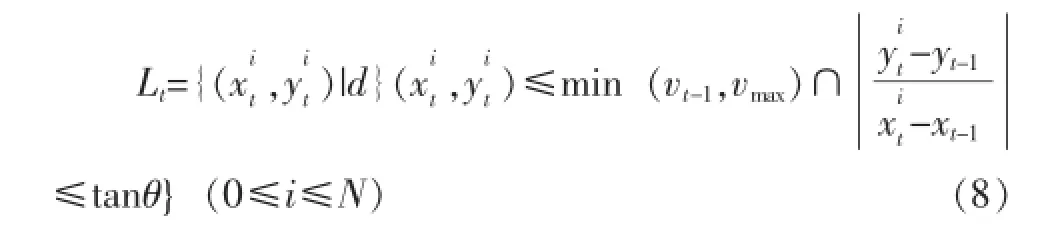
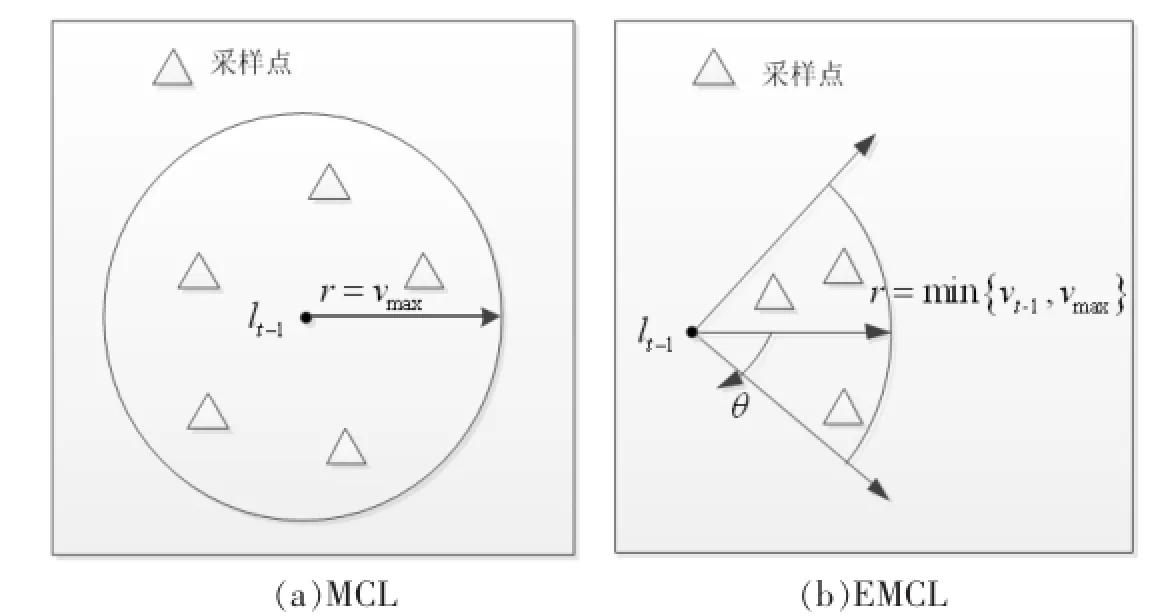
圖2 節點采用圖
2.2 樣本免疫生成階段
在濾波階段,算法依據當前時刻接收到的一跳和二跳錨節點的位置信息過濾掉無效的樣本。假設未知節點監測到的一跳錨節點的集合為S1,二跳錨節點的集合為S1,每個節點的通信半徑均為r。過濾條件如式(2)所示:

2.1 預測階段
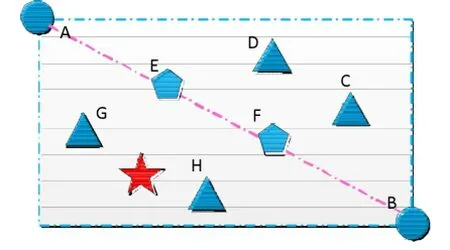
圖3 遺傳樣本示例圖
2.3 IMCL算法描述
IMCL算法描述如下:
①初始時,節點先按照傳統MCL算法獲得自身前3個時刻的位置坐標,把它們存放在一個歷史記錄隊列中。
②根據歷史記錄隊列中最新的3個時刻的位置坐標,利用二次牛頓插值得到當前時刻的運動速度vt-1公式(6)和運動方向(角θ)公式(7)。
③在以前一時刻的節點估計位置為圓心,以min(vt-1,vmax)為半徑,沿順時針及逆時針各展開角的扇形區域內隨機地選取N個位置樣本點;
④依據當前時刻接收到的2跳范圍內的錨節點進行濾波,判斷位置樣本集中的每個位置樣本點是否滿足濾波條件(2),如果不滿足那么就將該樣本丟棄;
⑤從濾波后的樣本集合中隨機的選取兩個樣本粒子進行線性交叉免疫和矩形交叉免疫。
⑥實驗中不考慮障礙物的遮掩。
⑦要是經過濾波操作后滿足條件的位置樣本數不足N,那么將扇形的角θ擴大1倍,重復執行預測、濾波、免疫、二次濾波的過程,直到獲得N個有效的樣本。
⑧計算未知節點在t時刻的位置如公式(3)。
希望各出版社夠增加英語原版書籍和音像材料的引進和出版,加大市場流通。尤其入門級英語原版童書繪本的市場細分需要加強和完善,以便給廣大英語入門學習者提供充分地道的語言環境,為英語語言的靈活運用提供豐富的借鑒范本,為語言技能習得打好堅實的基礎。
⑨將步驟⑧計算產生的新的定位值加入到歷史記錄隊列的尾部,若隊列的長度大于3,那么刪除隊首元素,保持隊列中存放的始終是3個最新的位置記錄。轉步驟③對未知節點下一時刻的速度方向進行估計。
3 仿真實驗及分析
尿蛋白是糖尿病腎病的主要指標之一,ACEI類藥物可使糖尿病腎病患者尿蛋白顯著減少,降低血壓,擴張腎血管,提高糖尿病腎病的療效[8]。ACEI可以抑制血管緊張素Ⅰ轉化為血管緊張素Ⅱ,降低循環系統血壓,改善腎臟血流動力學效果[9]。ACEI可以減緩2型糖尿病患者的腎病進程,起到保護腎功能、避免惡化的作用[10]。ACEI不僅可以減少尿蛋白排泄,同時可以保護腎避免因蛋白質的重吸收引起的腎小管超負荷導致的促炎癥反應。臨床上可以將其與其它藥物聯用,提高治療效果[11-12]。
(二)臨診癥狀和病理學診斷 急性病豬出現高熱、嚴重的呼吸困難、咳嗽、拒食、死亡突然,死亡率高。死后剖檢病變主要局限于胸腔,可見肺臟和胸膜有特征性的纖維素性和壞死性出血性肺炎、纖維素性胸膜炎。
為了檢驗IMCL算法的性能,本章使用MATLAB 2016b進行了一系列實驗仿真。假設錨節點本身的位置為已知的,且不發生移動。需跟蹤節點在仿真區域內按照Random Waypoint模型做隨機運動,并且在每個時間段都要對自身進行重定位。無線傳感器網絡和節點的參數設置為:
①仿真區域為500米×500米的矩形區域。
②設定節點的通信半徑r=150m。
通過多彩豐富的數學活動不僅可以滲透數學文化,還有利于拓寬學生的見識,發揮學生對學習數學的優勢特長,激發學習興趣。并且有利于學生獨立思考能力的培養,發展學生對數學的優秀才能激發潛力。數學教學活動的設計要符合學生的年齡特點,從而吸引學生的注意力。活動本身的形式與內容要豐富多樣,有趣味性。在數學文化的滲透過程中,可以幫助學生將復雜的問題進行簡單處理,當遇到新問題時可以利用自己掌握的知識和自身的能力去有效地處理解決,從而提升學生的素養與能力。開展數學活動可以包括:游戲競賽、動手操作、實踐應用、講述故事和智力活動等等。
③節點的最大速度為=50m/s。
節點根據t-1時刻的位置樣本集Lt-1,由公式(3)得出t-1時刻的節點估計位置lt-1,隨后以Lt-1(位置坐標為(xt-1,yt-1))為坐標原點,以min(vt-1,vmax)為半徑,在估算出的節點的運動方向沿順時針及逆時針各展開θ角從而得到一個扇形采樣區域,在該區域內隨機地選取N個候選位置樣本點,如圖2(b)所示。通過對節點的運動速度及運動方向的預測,釆樣區域與MCL算法相比大為減小,從而提高了采樣成功率。滿足上述情況的樣本集合可以表示為:
⑤初始布點是隨機的。
⑥進行二次濾波處理,同步驟④。
歐米茄星座系列至臻天文臺小秒針腕表搭載歐米茄8704至臻天文臺機心,令這款精巧典雅的腕表擁有精準走時。腕表配備白色珍珠母貝表盤,鑲嵌10枚鉆石小時刻度及4枚鉆石小秒盤刻度,盡顯靈動柔和之美。
用定位誤差和計算開銷來衡量定位算法的性能,其中定位誤差使用估計位置與實際位置之間的歐式距離與通信半徑的比值來表示,節點定位誤差的計算如下:

其中(x,y)和(x',y')分別為各節點的真實位置坐標和節點的估計位置坐標。
3.2 仿真分析
第一,制約語言文字工作定位因素研究,有利于處理好各民族語言之間的關系,處理好共同語與方言之間的關系,處理好母語同外語的關系,處理好普通話的國內推廣和國際傳播之間的關系。能夠充分認識到語言規劃越來越走近人們的真實生活,健康和諧的語言生活是推進社會科學發展的重要因素。
MCL和IMCL算法的平均定位時間如圖4所示。在相同仿真環境下進行了10組實驗,每組數據為連續5次定位計算所得平均值。從圖中可以看出,IMCL算法具有明顯優勢,比傳統的MCL算法相比定位時間減少了30%左右,同時,其算法性能也更加穩定。
如圖5所示,在相同仿真環境下進行了10組實驗,每組數據同樣為連續5次定位計算所得平均值。可以看出,IMCL算法的定位精度還是稍高于MCL算法,與MCL算法相比定位誤差降低了10%左右。總體看來,IMCL算法雖精度提高不明顯,但在算法性能上獲得了較大改善,這對于能量即是生命的無線傳感器節點來說,是至關重要的。
圖6描述了在不同vmax下兩種算法定位誤差的變化。隨著vmax的提高,MCL算法與IMCL算法的定位誤差都有不斷增大的趨勢。這是由于vmax的連續增大,采樣區域也隨之變大,致使無效樣本增多導致定位誤差也逐漸變大。但IMCL算法的定位誤差還是稍低于MCL算法。
圖7描述了MCL和IMCL算法在不同樣本數目下節點定位誤差的變化。從圖中可以看出隨著樣本數目的增多,兩種定位算法的定位誤差都不斷減小,MCL和IMCL兩種定位算法之間的定位誤差大致相等。
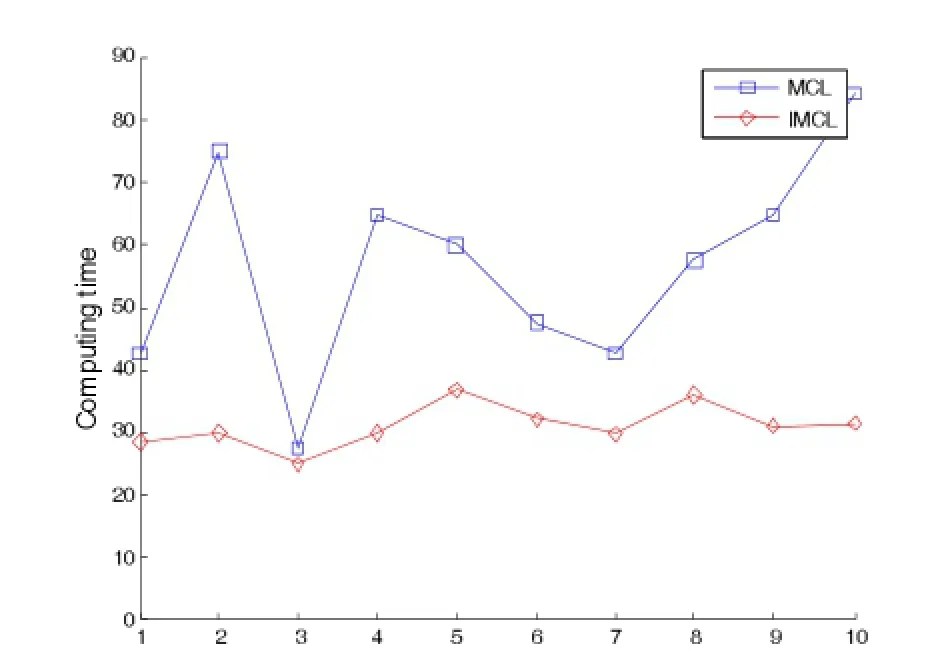
圖4 定位花費時間比較
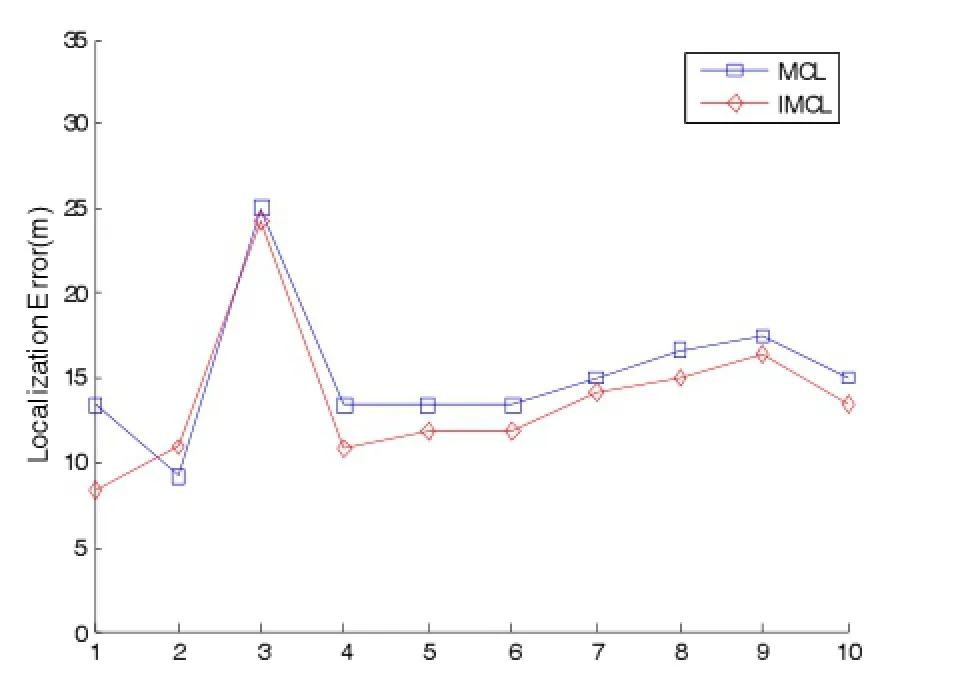
圖5 定位誤差比較
4 結語
在MCL算法的基礎之上,結合遺傳算法和插值法提出了一種IMCL算法。通過引入交叉免疫操作,對蒙特卡洛算法的采樣結構進行了優化,減少了采樣次數,降低了算法的計算開銷;采用插值法對節點的運動速度及方向進行預測,縮小了采樣區域,提高了定位精度。實驗結果表明,與MCL算法相比提出的IMCL算法定位精度提高了10%左右,定位時間減少了30%左右。然而,目前的研究尚不完善,障礙物遮掩情況下的定位跟蹤將是我們下一步工作的重點。

圖6 定位精度隨移動速度變化

圖7 定位精度隨樣本數目變化
[1]Qian Zhi-hong,Wang Yi-jun.Internet Of Things-Oriented Wireless Sensor Networks Review[J].Journal Of Electronics&Information Technology,2013,35(1):215-227.
[2]Liu YH,Yang Z,Wang XPEt Al.Location,Localization,and Localizability.Journal of Computer Science and Technology25(2):1-Mar.2010
[3]Yaghoubi F,Abbasfar A A,Maham B.Energy-Efficient RSSI-Based Localization for Wireless Sensor Networks[J].IEEE Communications Letters,2014,18(6):973-976.
[4]Bandiera F,Coluccia A,Ricci G,Et A l.TDOA Localization in Asynchronous WSNs[C].IEEE International Conference on Embedded and Ubiquitous Computing.IEEEComputer Society,2014.
[5]Wang J,Urriza P,Han Y,Et Al.Weighted Centroid Localization Algorithm:Theoretical Analysis and Distributed Implementation[J]. IEEE Transactions onWireless Communications,2011,10(10):3403-3413.
[6]Hadir A,Zine-Dine K,Bakhouya M,Et Al.An Optimized DV-Hop Localization A lgorithm Using Average Hop Weighted Mean in Wsns[C].TheWorkshop on Codes,2014:25-29.
[7]Hu Ling-Xuan and Evans D.Localization for Mobile Sensornetworks[C].Proceedings of Mobicom 2004,Philadelphia,Pennsylvania, USA,September,2004:45-57.
[8]Baggio A and Langendoen K.Monte Carlo Localization Formobile Wireless Sensor Networks[J].Ad Hoc Networks,2008,6(5):718-733.
[9]Rudafshani M,Datta S.Localization in Wireless Sensor Networks[C].International Symposium on Information Processing in Sensor Networks,2007:216-221.
[10]Shao Q,Xu H,Jia L,Et Al.The Research of Monte Carlo Localization Algorithm Based on Received Signal Strength[C].International Conference onWireless Communications,Networking and Mobile Computing.IEEE,2011:1-4.
[11]Hartung S,Bochem A,Zdziarstek A,Et Al.Applied Sensor-Assisted Monte Carlo Localization for Mobile Wireless Sensor Networks [C].International Conference on Embedded Wireless Systems and Networks.Junction Publishing,2016:181-192.
Im proved Monte Carlo Localization for Mobile W ireless Sensor Network
SHIYan1,YANGWen-zhong1,2,GAO Qiu-tian1,LIShuang-shuang2
(1.School of software,Xinjiang University,Urumqi 830008;2.School of Information Science and Technology,Xinjiang University,Urumqi 830046)
Monte Carlo Localization(MCL)has a decisive role for themobile nodes'localization in W ireless Sensor Networks(WSN).However,current MCL-based approaches need to acquire a large number of samples to calculate to achieve good precision.The energy of one node is limited and can't last for a long time.Aiming to solve the problems,proposes an improved algorithm IMCL(Improved MCL),in which applies the genetic algorithm to improve MCL in MSNs for localization.Besides,uses interpolation operation to predict the velocity and angle,which improves the sampling efficiency by reducing the scope from which the candidate samples are selected.Experimental results illustrate that themethodology has a better performance in comparison with Monte Carlo localization algorithm.
石研(1991-),女,河南商丘人,碩士研究生,研究方向為無線傳感器網絡節點定位和網絡安全
楊文忠(1971-),男,河南南陽市人,博士,副教授,研究方向為物聯網和網絡安全
高秋田(1991-),女,河南平輿人,碩士研究生,研究方向為移動傳感器網絡
2017-03-23
2017-05-10
國家自然科學基金項目(No.U1603115、No.61262087、No.61262089)
1007-1423(2017)14-0003-06
10.3969/j.issn.1007-1423.2017.14.001
李雙雙(1992-),女,山東濟寧人,碩士研究生,研究方向為無線網絡算法和分析和信息安全
韓玄(1991-),男,河南商丘人
Wireless Sensor Network;Mobile Node;Localization;Monte Carlo Localization(MCL);Genetic Algorithm(GA)