串聯機械臂及視覺控制探究
2017-07-07 11:13:43張景晰曹奇左攀張文龍唐偉李新科
電子測試 2017年9期
關鍵詞:控制技術
張景晰,曹奇,左攀,張文龍,唐偉,李新科
(金發科技股份有限公司,廣東廣州,510520)
串聯機械臂及視覺控制探究
張景晰,曹奇,左攀,張文龍,唐偉,李新科
(金發科技股份有限公司,廣東廣州,510520)
本文從串聯機器人和視覺技術的應用方面,對機器人如何通過視覺完成復雜的包裝工作進行探究。關鍵詞:機器人;并聯機器人;串聯機器人;視覺;包裝;控制技術
0 引言
機器人技術是推動制造業的升級的重要動力,應用范圍也越來越多。機器人按照設計結構來分,可分為串聯機器人和并聯機器人。機器人的主要指標有工作空間,自由度、有效負載、運動精度、運動特性、動態特性等。串聯機器人剛好和并聯機器人有一定的互補性,通常負載都可以優于并聯型機器人,尤其是在裝配、搬運、焊接等對負載要求較高的應用場合。
視覺技術作為一種全新技術進入了工業自動化領域,機器人技術和視覺技術的結合是為了擴展機器人的視覺功能,加上先進的編程算法,使得機器人的應用空間更加廣泛,適用于更加復雜的應用。
1 機器人技術原理
1.1 串聯機器人技術
顧名思義,串聯機器人它的各個運動關節是是串在一起的,而如何實現機器人的運動,需要從以下幾個方面的相關技術和知識來了解。
1.2 位姿描述和參考系
參考系即指設定的一個空間坐標系,位姿描述是指在這個參考系中物體的位置和姿態。通常情況下把機器人的安裝部分即固定底座的參考系稱為基坐標系{B},末端操作工具參考系稱為工具坐標系{T},平臺坐標系稱為工作臺坐標系{S},腕坐標系{W}。在控制算法內,必須進行相應的坐標系轉換才能對機器人的運動進行控制,即通過正運動學和逆運動學的知識,計算出機器人的運動軌跡并到達指定的位姿。
1.2.1 正運動學和逆運動學
串聯機器人是由連桿和關節組成,通過關節來實現連桿的轉動或移動。在一般研究中,需要在D-H參數和坐標系建立的情況下,通過坐標系變換的方法,求解末端執行器在工作空間的位置和姿態,屬于機器人正運動學問題。
串聯機器人逆運動學是指在已知工具坐標系{T}相對于工作臺坐標系{S}的期望位置和姿態,如何計算出合適的關節角。通過算法,找到最優的逆運動學的解,就解決了機器人的運動軌跡問題。
1.2.2 控制算法實現
機器人的運動是為了實現某種工作要求,所以機器人運動過程必須遵循最優的運動軌跡才能實現,控制算法計算出驅動器運動所期望的力矩。控制算法還應該能夠通過在有干擾和誤差的情況下,通過線性或者非線性的位置控制方法實現跟隨軌跡的運動路徑,從而完成所要求的的工作。本文主要關于機器人的功能實現,對機器人的應用方面技術進行說明。
2 視覺技術原理
2.1 機器視覺技術
視覺技術正在改變著制造行業,機器視覺類似于人的眼睛,可以通過非接觸的傳感器技術,借助于先進的算法,完成更復雜更強大的功能。借助于檢測和跟蹤程序,制造商可以自始至終地跟蹤產品。視覺向導機器人使得機器人解決方案在曾經不可能的領域成為可能。
攝像機在有光源(可見光或不可見光)的情況下,攝像機工作與光源的控制同步,從而采集到檢測物的圖像。圖像采集卡將被檢測的目標轉換成圖像信號,傳送給專用的圖像處理系統,根據像素分布和亮度、顏色等信息,轉變成數字化信號,圖像處理系統對這些信號進行各種運算來抽取目標的特征[3],如面積、數量、位置、長度,再根據預設的允許度和其他條件輸出結果,包括尺寸、角度、個數、有/無等,實現自動識別功能。
2.2 機器人的視覺控制原理
機器人視覺方案主要是用視覺技術幫助機器人在視覺技術確定工作點的位置和姿態,從而用于指引機器人在大范圍內的操作和行動,如從料斗送出的雜亂工件堆中揀取工件并按一定的方位放在傳輸帶或其他設備上(即料斗揀取問題)。如圖2所示的凌云公司機器人視覺方案中,在機器人末端執行器(E)處增加了攝像頭(C)和光源(B),機器人在執行運動前,通過視覺技術對目標位(A)進行檢測和識別,機器人沿算法生成的運動軌跡控制完成撿取動作。
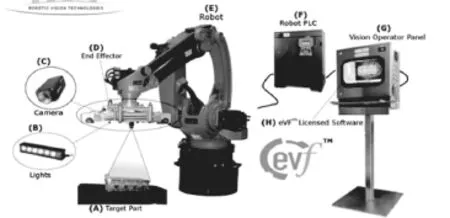
圖1 凌云公司機器人視覺方案
3 復雜包裝應用的算法
3.1 實際應用的特點
為了對串聯機器人的視覺技術在實際的應用中,如何完成工作要求的方法進行探究。運用算法使機器人實現多規格產品的包裝,是本次的工作任務。
對非標準規格的紙箱完成其包裝任務,這類的包裝工作任務有以下幾個特點,是設計算法的核心問題。
(1)每個規格的產品的體積大小、長寬高是不相同的。
(2) 每個規格的產品的位置是不確定的。
(3)每個規格的產品的底部是相同的平面,且放置時不傾斜。
由于采用機器人的視覺控制技術來實現工作任務,我們假設視覺控制算法和機器人控制算法是成熟可靠的,且假設控制過程和技術是可靠的。本文只對視覺技術如何加入到算法設計中,幫助機器人實現工作任務進行分析和探討。
3.2 控制算法的框圖
3.2.1 串聯機器人工作原理
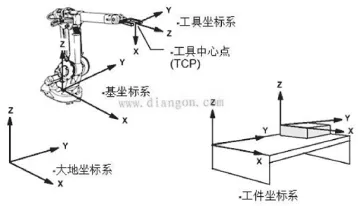
圖2 坐標系的位置示意圖
串聯機器人需要完成包裝工作,對于紙箱的位置和大小要進行確認,也就是圖2中的工作臺坐標系{S}內的目標坐標{G},工作臺坐標系{S}相對于基坐標系{B}的關系是確定的,可以通過得到工件坐標系相對于基坐標系的坐標。
工具坐標系相對于腕坐標系也是相對固定的,可以通過確定工具坐標系。機器人系統需要通過算法計算一系列的關節角度,使關節一次運動,工具坐標系從初始位置運動到{T}={G}時,即機器人末端執行工具到達了目標位置和姿態,可以開始設定的包裝工作任務。
3.2.2 控制算法和設計思想
由第1小節的分析可知,如果需要機器人完成拾取和包裝任務,必須先確定目標坐標,而目標坐標{G}通常是針對工作態度坐標系{S}來描述的,由于串聯機器人在機器人的末端固定位置增加了視覺系統,可以通過視覺技術來確定目標紙箱的坐標:
(1)機器人到達指定位置T1(上方),確定紙箱的擺放位置P1。
(2)機器人到達指定位置T2(側面),確定紙箱的高度H1。
(3)通過視覺控制技術確定,目標紙箱相對于工作臺坐標系的坐標TG。
運用逆運動學知識,求解機器人的運動軌跡和關節角度,隨后,控制機器人運動,使工具坐標系{T}={G}時,即機器人末端執行工具到達了目標位置和姿態,可以開始設定的包裝工作任務。
3.3 需要解決的問題
3.3.1 視覺技術的準確性問題
要想實時準確的獲得桌子、瓶子、瓶蓋之間的相對位置和三維信息,對目前的科技水平來說還是一個難點。這一問題只能通過目前熱門的雙目或者多目的三維測量、姿態跟蹤、姿態識別等技術來實現,但是這些方法也存在一些缺點需要解決。機器視覺系統對于外部環境和光源要求比較高,如果出現外部環境干擾等影響,有可能無法完成視覺控制算法,或者計算結果出錯,從而影響機器人工作任務的實現。
3.3.2 機器人逆運動學求解
機器人的控制離不開逆運動學,而求解機器人逆運動學問題常用的逆陣十分復雜。機器人視覺控制技術中,需要機器人先完成固定的一些圖像拍攝任務,從而根據視覺控制算法形成三維結構或者給出控制信號,機器人需要更強的逆運動學求解能力。機器人模型的誤差和運動的誤差,加上攝像機的誤差,及視覺控制器的誤差,對于機器人的精度都有影響,如果要完成復雜的工作任務,必須克服各種影響。
4 小結
機器人視覺控制技術可以完成更復雜的工作任務,因為視覺技術相比較傳統傳感器技術,視覺信息包含信息量大,可以非接觸地感知環境等優點,如果有合適的算法能夠實現更強的功能,勝任復雜任務。這將會使我國人工智能技術實現進一步發展,推動我國制造業的發展。
參考資料
[1](美)克來格(John J.Craig)著,贠超等譯.機器人學導論[M].機械工業出版社. 2006.6.
[2]康博.工業機器人軌跡跟蹤控制算法研究[D].華南理工大學.2012.
[3]岳曉峰.計算機視覺技術及其在工業中應用的研究[D].吉林大學.2006.
[4]趙清杰,連廣宇,孫增圻.機器人視覺伺服綜述[J].控制與決策. 2001, 16(6):849-853 .
[5]鐘玉琢.機器人視覺技術[M].北京:國防工業出版社,1994.
Series mechanical arm and visual control
Zhang Jingxi,Cao Qi,Zuo Pan,Zhang Wenlong,Tang Wei,Li Xinke
(The blond technology co., LTD. ,Guangzhou Guangdong,510520)
This article from the aspects of serial robot and the application of visual technology, the robot how to visually explore the complex packing work.
robot;parallel robot;serial robots;vision;packaging;control technology
猜你喜歡
機電安全(2022年1期)2022-08-27 02:15:16
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2019年7期)2019-04-25 13:16:50
電子測試(2018年14期)2018-09-26 06:04:44
上海大中型電機(2017年4期)2017-02-06 05:27:06
山東工業技術(2016年15期)2016-12-01 05:30:51
照明工程學報(2016年3期)2016-06-01 12:17:56
水電站機電技術(2014年4期)2014-10-13 08:30:07
水電站機電技術(2014年1期)2014-09-26 11:59:46
導航定位與授時(2014年2期)2014-04-27 13:41:08
