雙行星排式動力耦合機構動態(tài)特性分析
2017-07-06 11:02:56鄭銘垠左言言吳傳剛楊忠凱
重慶理工大學學報(自然科學) 2017年6期
關鍵詞:發(fā)動機
鄭銘垠,左言言,吳傳剛,楊忠凱
(江蘇大學 振動噪聲研究所, 江蘇 鎮(zhèn)江 212013)
?
雙行星排式動力耦合機構動態(tài)特性分析
鄭銘垠,左言言,吳傳剛,楊忠凱
(江蘇大學 振動噪聲研究所, 江蘇 鎮(zhèn)江 212013)
以某款混合動力汽車動力耦合機構為例,綜合應用UG、ADAMS及ANSYS建立雙行星排式動力耦合機構剛柔耦合動力學模型;對建立的系統(tǒng)動力學模型進行典型工況下的仿真分析,通過分析前后排行星輪系輪齒嚙合力、軸系角加速度的時域和頻域響應曲線,得到該動力耦合機構在穩(wěn)態(tài)(如純電動、巡航)和非穩(wěn)態(tài)(如發(fā)動機起動)工況下的動態(tài)特性。仿真結果表明:該動力耦合機構穩(wěn)態(tài)工況下動態(tài)特性峰值頻率主要為低頻段的旋轉頻率和兩行星排的嚙合頻率及其倍頻;非穩(wěn)態(tài)工況初期存在瞬時沖擊激勵,但前排行星輪系動態(tài)特性的變化對后排行星輪系影響較小。
混合動力汽車;動力耦合機構;行星齒輪;動態(tài)特性
動力耦合機構是耦合混合動力汽車發(fā)動機和電機輸出動力的關鍵部件,其中行星齒輪動力耦合機構的應用最為廣泛[1]。動力耦合機構要承受各動力源輸入的穩(wěn)態(tài)載荷和動力切換過程中的瞬態(tài)沖擊,由此產生的振動與噪聲直接影響乘坐舒適性[2]。
行星齒輪系統(tǒng)動態(tài)特性以齒輪副嚙合時的動力學特性為核心。主要研究齒輪系統(tǒng)在傳遞動力過程中的沖擊、振動和噪聲規(guī)律,為設計振動小、噪聲低、可靠性高的齒輪系統(tǒng)提供理論依據[3]。王偉華等[4-6]分析了行星齒輪式混合動力汽車動力耦合機構的構型和工作模式,得到了不同工作模式下動力耦合機構輸出的轉速和轉矩特性。Deur[7]建立了某車輛行星傳動系統(tǒng)動力學模型,驗證了系統(tǒng)的傳動規(guī)律與動力學特性。
前人對行星齒輪系統(tǒng)進行了大量而深入的研究,但對包含整個傳動系和結構系的復合行星齒輪系的多工況動力學研究還很少。本文通過建立ADAMS多體動力學模型,對動力耦合機構進行典型工況下的動力學仿真,分析不同工況下各構件的運動特性以及齒輪嚙合力的時域和頻域特性。
1 動力耦合機構三維實體建模
1.1 混聯式混合動力系統(tǒng)
混聯式動力耦合系統(tǒng)綜合了串聯和并聯的特點,其動力源包括內燃機和電機,通過行星齒輪動力耦合機構的耦合作用,既可以實現各動力源的單獨驅動,也可以實現2個動力源的聯合驅動[8]。本文以某混聯式混合動力汽車為例,建立其動力耦合系統(tǒng)的示意圖,如圖1所示。
此混合動力系統(tǒng)的動力源包括發(fā)動機、電機MG1/電機MG2。其動力耦合機構由前后排行星齒輪系構成,都以齒圈作為動力輸出部件。兩行星齒輪排的內齒圈分別嵌套在復合齒輪機構的左右兩邊。兩行星齒輪系與各動力源的連接關系如下[9]:
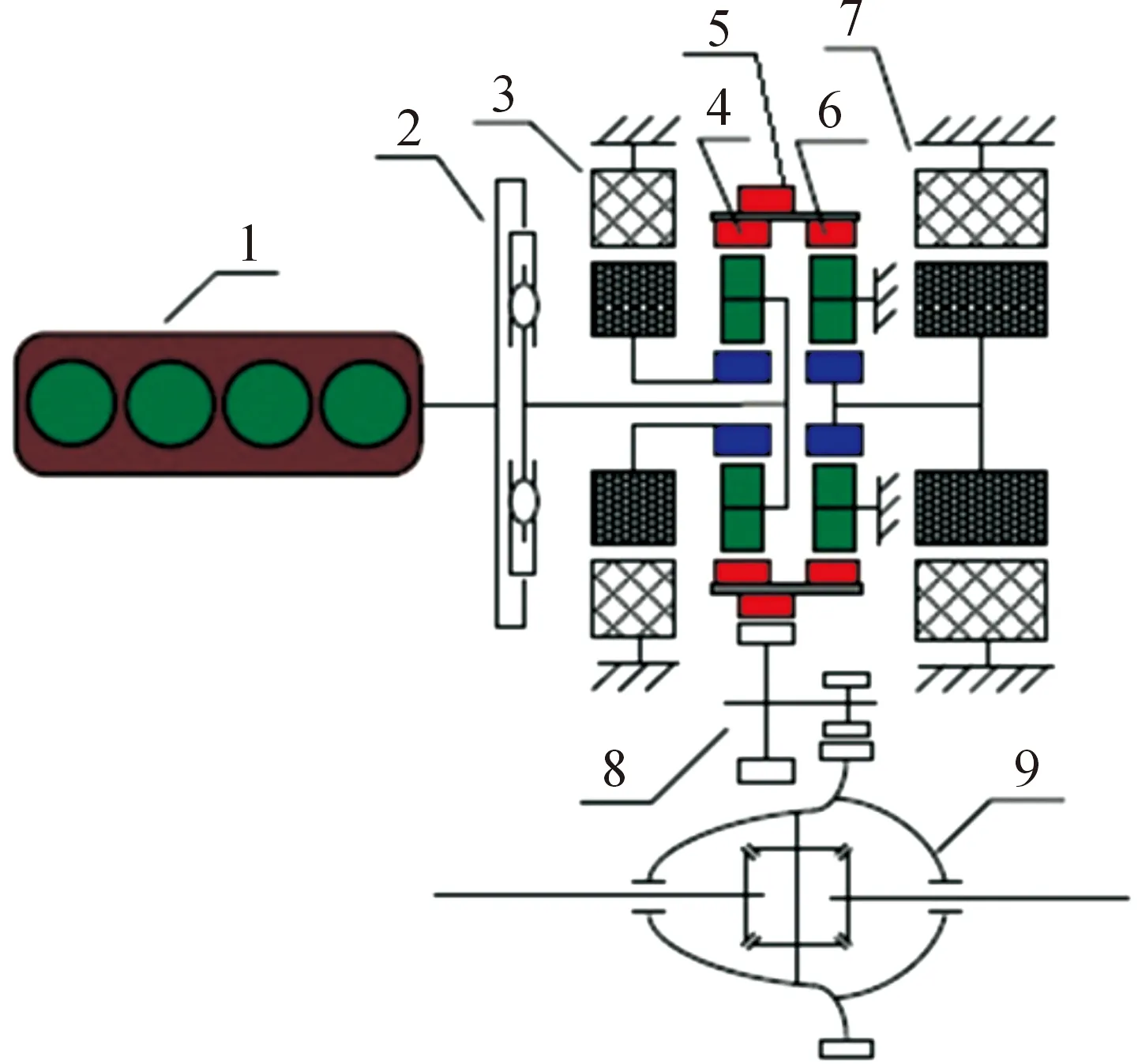
1.發(fā)動機;2.扭轉減振器;3.電機MG1;4.前排行星輪系;5.復合齒輪機構;6.后排行星輪系;7.電機MG2;8.主減速器齒輪;9.驅動橋
圖1 某混聯式混合動力汽車動力系統(tǒng)結構
1.2 動力耦合機構三維實體建模
根據已知的結構參數,利用UG8.0自帶的齒輪庫建立行星輪系中各漸開線斜齒輪的實體模型,得到行星輪系的三維模型,如圖2 所示。表1為雙排行星輪系各齒輪的基本參數。
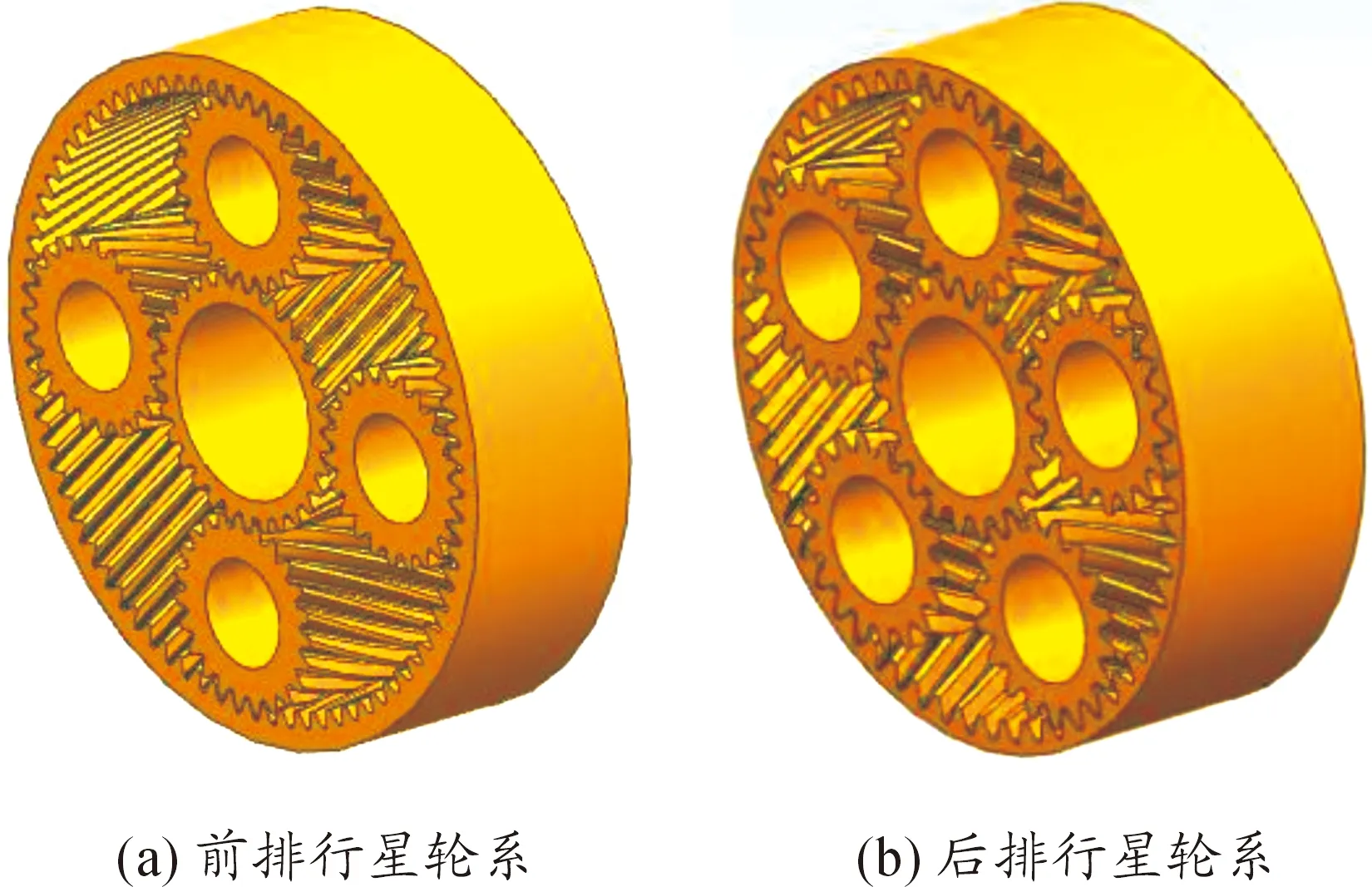
圖2 斜齒行星齒輪系實體模型
整個動力耦合系統(tǒng)還包括發(fā)動機輸入軸、兩電機及其輸入軸、復合齒圈、軸承等部件。根據已知的參數,建立各子部件的實體模型。應用UG的裝配模塊,通過施加各種約束關系,將動力耦合系統(tǒng)的各部件裝配成一體,整個裝配體模型見圖3。

圖3 動力耦合系統(tǒng)裝配體模型
2 動力耦合機構多體動力學建模
將UG模型通過中間格式(Parasolid)導入到ADAMS中,定義系統(tǒng)部件的材料屬性,包括密度、泊松比和彈性模量;施加各構件的約束關系;采用沖擊函數法定義輪齒之間的接觸力[10]。該動力耦合機構運行工況復雜多變,發(fā)動機、電機MG1/MG2要根據工況條件頻繁啟停。為了提高計算精度,利用ANSYS將發(fā)動機輸入軸、兩電機輸入軸進行柔性化處理[11]。創(chuàng)建的剛柔耦合動力學模型如圖4所示。

圖4 剛柔耦合動力學模型
3 動力耦合機構多體動力學仿真分析
3.1 載荷和驅動的施加
采用混合動力汽車檢測儀對其進行路上試驗,得到典型工況下各動力元件的轉速和轉矩數據,如表2所示。
3.2 仿真觀測點的選擇
動力耦合系統(tǒng)的振動噪聲特性與兩行星排的嚙合傳動息息相關,所以選擇兩行星排的太陽輪與行星輪、行星輪與內齒圈的嚙合力為觀測目標。在汽車運行過程中,發(fā)動機要頻繁起停,兩電機要在發(fā)電機和電動機之間頻繁切換,所以選擇發(fā)動機輸入軸和兩電機輸入軸的質心角加速度作為觀測點,研究其扭轉振動特性。

表1 雙排行星輪系各齒輪的基本參數
注:“前排”含4個行星輪,各齒輪存在變位;“后排”含5個行星輪,各齒輪為標準斜齒輪。

表2 不同工況下各動力元件的試驗數據
注:v為車速(km·h-1);nEng、nMG2、nMG1為發(fā)動機、電機MG2、電機MG1的轉速;TMG2、TMG1為電機MG2、電機MG1轉矩。

圖5 嚙合力時域和頻域響應曲線
3.3 動力耦合機構典型工況仿真結果及分析
3.3.1 純電動工況
根據表2,在v=30 km/h純電動工況下,電機MG2輸入轉速nMG2=2 250 r/min,由于動力耦合機構中相互嚙合的齒輪之間存在間隙,仿真的初始時刻會存在瞬態(tài)沖擊,為了盡量減少仿真初始時刻的瞬態(tài)沖擊,使用Step函數為電機MG2轉子施加轉速驅動:nMG2=step(time,0,0,0.05,13 500d),表示在0.05 s時轉速增加至13 500(°)/s,復合齒圈負載力矩Tv=16.85 N·m[12]。仿真時間為0.5 s,步數為1 000步。
由圖5嚙合力的頻域響應曲線可知:后排行星輪系在頻率f=825 Hz,f=1 650 Hz處存在明顯的峰值,分別對應后排嚙合頻率及其2倍頻;在低頻段f=37.5 Hz處也存在峰值,對應太陽輪的旋轉頻率;前排行星輪系在f=1 110 Hz,f=2 219 Hz處存在明顯峰值,分別對應前排嚙合頻率及其2倍頻;另外,在低頻段f=74.8 Hz處存在明顯峰值,對應太陽輪的2倍旋轉頻率。
由圖6軸角加速度時域響應曲線可知:齒輪系統(tǒng)在傳動過程中存在明顯的動載成分,各軸角加速度存在波動。由頻域特性曲線可知:各輸入軸角加速度低頻成分比較明顯,主要為輸入軸的旋轉頻率及其倍頻。此外電機MG2輸入軸在f=3 287 Hz存在峰值,對應后排嚙合頻率4倍頻;MG1輸入軸在f=2 218 Hz存在峰值,對應前排嚙合頻率的2倍頻,但兩者的峰值并不突出。
綜上可知,在純電動穩(wěn)態(tài)工況下,動力耦合機構運行平穩(wěn),其頻域特性的主要峰值頻率為低頻段的旋轉頻率和兩行星排的嚙合頻率及其倍頻。

圖6 軸角加速度時域與頻域響應曲線
3.3.2 巡航工況
對于v=30 km/h巡航工況,根據表2,使用Step函數對發(fā)動機和電機MG2轉子施加轉速驅動:nEng=Step(time,0,0,0.05,7 320d),nMG2=Step(time,0,0,0.05,13 218d);對復合齒圈施加負載轉矩Tv=16.85 N·m[12],兩電機都作為發(fā)電機,此時兩電機的負載轉矩TMG1=-6.25 N·m,TMG2=-9.25 N·m。仿真時間為0.5 s,步數為1 000步。
由圖7嚙合力時域和頻域響應曲線可知:在穩(wěn)態(tài)巡航工況下,各齒輪對之間的嚙合力時域信號比較平穩(wěn)。并且后排在其嚙合頻率f=807.8Hz及其2倍嚙合頻率f=1 615 Hz處存在峰值,另外后排太陽輪與行星輪嚙合力在f=36.6 Hz處也存在較大峰值,其對應太陽輪的旋轉頻率,而前排峰值頻率f=37 Hz對應前排太陽輪旋轉頻率,峰值頻率f=500 Hz對應前排嚙合頻率。
由圖8軸角加速度頻域響應曲線可知:各輸入軸角加速度頻域信號比較平穩(wěn),其峰值頻率主要為低頻的旋轉頻率或2倍旋轉頻率。
綜上可知:在穩(wěn)態(tài)巡航工況下,動力耦合機構運行平穩(wěn),其主要峰值頻率為兩行星排的嚙合頻率及其倍頻、輸入軸的旋轉頻率及其倍頻。

圖7 嚙合力時域和頻域響應曲線

圖8 軸角加速度時域和頻域響應曲線
3.3.3 停車工況下發(fā)動機啟動
啟動汽車之后,若電池電量不足或發(fā)動機水溫過低,電機MG1會作為啟動電機,帶動太陽輪旋轉,并通過行星架啟動發(fā)動機。根據表2,對電機MG1施加轉速驅動:nMG1=Step(time,0,0,0.25,-7 020d),由發(fā)動機轉動慣量求得其輸入軸上的負載力矩TEng=34 N·m。仿真時間為0.25 s,仿真步數為500步:
由圖9前排嚙合力響應曲線可知:發(fā)動機啟動的前半段時間,前排嚙合力存在一定的瞬時沖擊激勵,隨著發(fā)動機的起動,嚙合力逐漸趨于平穩(wěn);從頻域響應曲線可知,并未出現突出峰值,但低頻段幅值較大。
由圖10角加速度時域響應曲線可知:電機MG1和發(fā)動機輸入軸依然在發(fā)動機啟動前半段時間存在較大的沖擊振動,而頻域特性中并沒有突出峰值。 綜上可知:停車狀態(tài)下發(fā)動機啟動時,前排行星輪系在前半段時間內存在一定的沖擊振動,但隨著發(fā)動機運行逐漸趨于平穩(wěn),其頻域響應曲線中并未出現突出的峰值。

圖9 嚙合力時域和頻域響應曲線

圖10 軸角加速度時域和頻域響應曲線
3.3.4 發(fā)動機在純電動工況下啟動
汽車起初在純電動模式v=30 km/h勻速行駛,當電量下降到設定值或猛踩油門踏板的一瞬間,發(fā)動機會在電機MG1的帶動下迅速啟動,電機MG1由反向空轉迅速轉變?yōu)檎D。根據表2,為電機MG2施加轉速驅動:nMG2=13 500 r/min;MG1轉速驅動nMG1=Step(time,0.05,13 314d,0.25,-3 967.8d),其表示0.05 s之前為純電動工況, 0.05 s至0.25 s為發(fā)動機啟動狀態(tài);復合齒圈負載力矩Tv=16.85 N·m[12];此外,在發(fā)動機軸上施加克服轉動慣量負載TEng=34 N·m。仿真時間為0.25 s,仿真步數為500步。
由嚙合力的時域和頻域響應曲線可知:純電動工況下發(fā)動機啟動時,后排嚙合力特性并未受到太大影響,依然在嚙合頻率f=825 Hz及2倍嚙合頻率f=1 650 Hz處存在突出的峰值;而由于此時電機MG1及發(fā)動機的轉速都在變化,前排嚙合力特性變化較大,發(fā)動機啟動初期前排嚙合力信號并不十分平穩(wěn),在某些時刻會存在瞬態(tài)沖擊,但沖擊載荷峰值不大,而且頻域特性中并沒有突出的峰值。
由各軸角加速度響應曲線可知:純電動工況下發(fā)動機啟動時,電機MG2輸入軸角加速度并未出現太大變化;電機MG1輸入軸角加速度在發(fā)動機啟動初期出現了較大波動,隨著發(fā)動機運行逐漸趨于平穩(wěn),發(fā)動機輸入軸角加速度逐漸減小。
綜上可知:純電動工況下發(fā)動機啟動時,前排行星輪系動態(tài)特性的變化對后排行星輪系及復合齒圈動態(tài)特性影響較小。

圖11 嚙合力時域和頻域響應曲線

圖12 軸角加速度時域和頻域響應曲線
4 結論
1) 在穩(wěn)態(tài)工況(如純電動工況和巡航工況)下,該動力耦合機構運行平穩(wěn),其動態(tài)特性峰值頻率主要為兩行星排的嚙合頻率及其倍頻。
2) 在停車狀態(tài)下發(fā)動機啟動時,初期存在一定的瞬時沖擊激勵,但隨著發(fā)動機的運行嚙合力逐漸趨于平穩(wěn)。
3) 在純電動工況下發(fā)動機啟動時,前排行星輪系動態(tài)特性的變化并未對后排行星輪系造成太大的影響。
4) 此雙行星排式動力耦合機構結構合理,可以適應各種典型的工況。
[1] 朱福堂,陳俐,殷承良,等.混合動力汽車行星齒輪機構的方案設計與優(yōu)選[J].中國機械工程,2010,21(1):104-109.
[2] 周立峰.基于ANSYS 的行星齒輪系統(tǒng)參數化建模與模態(tài)分析[D].南京:南京航空航天大學,2009.
[3] 李潤方,王建軍.齒輪系統(tǒng)動力學:振動、沖擊、噪聲[M].北京:科學出版社,1996.
[4] 王偉華,宋瑞芳,劉松,等.雙模功率分流式混合動力系統(tǒng)構型分析[J].汽車工程,2015,37(6):648-654.
[5] 歐陽明高,田碩,徐梁飛.汽車動力的混合化發(fā)展趨勢與構型分析[J].汽車工程,2008,30(9):742-752.
[6] BURRESS T A,CAMPBELL S L,COOMER C L,et al.Evaluation of the 2010 Toyota Prius Hybrid Synergy Drive System [R].Oak Ridge,Tennessee:Oak Ridge National Laboratory,2011,3.
[7] DEUR J,ASGARI J,HROVAT D,et al.Modeling and analysis of automatic transmission engagement dynamics-linear case[J].Journal of Dynamic Systems,Measurement and Control 2006,128:263-277.
[8] 趙博聞.一種雙排行星輪系動力耦合方案研究[D].上海:上海交通大學,2013.
[9] 莫愁,陳吉清,蘭鳳崇.混合動力汽車動力集成傳動機構的設計與分析[J].汽車工程,2016,38(1):36-41.
[10]畢鳳榮,崔新濤,劉寧.漸開線齒輪動態(tài)嚙合力計算機仿真[J].天津大學學報,2005,38(11):991-995.
[11]田磊.混合動力汽車動力分配器殼體結構改進及優(yōu)化[D].長春:吉林大學,2012.5.
[12]余志生.汽車理論[M].3版.北京:機械工業(yè)出版社,2003:1-4.
(責任編輯 劉 舸)
Dynamic Characteristic Analysis of Double Planetary Gear Power Coupling Mechanism
ZHENG Ming-yin, ZUO Yan-yan, WU Chuan-gang, YANG Zhong-kai
(Institute of Noise and Vibration, Jiangsu University, Zhenjiang 212013, China)
Taking a double planetary gear power coupling mechanism of hybrid electric vehicle as an example,this paper established multi-body system dynamics model of the double planetary gear power coupling mechanism through the comprehensive application of UG, ADAMS and ANSYS. Then,simulation analysis of multi-body system dynamics model under typical steady conditions was carried out. Through the analysis of time domain and frequency domain response curve of shafting angular acceleration and meshing forces,this paper obtained the dynamic characteristics of coupling mechanism in the steady state conditions (such as electric,cruise) and non-steady state conditions(such as engine starting). Simulation results show that in the steady state conditions, the peak frequency of dynamic characteristics is rotating frequency,meshing frequency of double row of gear planetary and its octave. Transient impact exists in the initial stage of non-steady state, but the dynamic characteristics of front row planetary gear have little influence on rear planet gear.Key words: hybrid electric vehicle; power coupling mechanism;planetary gear; dynamic characteristic
2016-08-15
國家自然科學基金資助項目(51575238)
鄭銘垠(1992—),男,浙江寧波人,碩士研究生,主要從事振動與噪聲控制研究,E-mail:zmygogoing@163.com ;通訊作者 左言言(1958—),男,江蘇漣水人,教授,博士生導師,主要從事振動與噪聲控制研究。
鄭銘垠,左言言,吳傳剛,等.雙行星排式動力耦合機構動態(tài)特性分析[J].重慶理工大學學報(自然科學),2017(6):47-56.
format:ZHENG Ming-yin, ZUO Yan-yan, WU Chuan-gang, et al.Dynamic Characteristic Analysis of Double Planetary Gear Power Coupling Mechanism[J].Journal of Chongqing University of Technology(Natural Science),2017(6):47-56.
10.3969/j.issn.1674-8425(z).2017.06.007
TH113
A
1674-8425(2017)06-0047-10
猜你喜歡
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:30
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:18
汽車維修與保養(yǎng)(2020年11期)2020-06-09 05:42:06
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
汽車維護與修理(2016年3期)2016-02-28 13:16:54
汽車維修與保養(yǎng)(2015年1期)2015-04-17 03:25:30
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年6期)2014-02-27 12:10:49
汽車與新動力(2014年5期)2014-02-27 12:10:41
汽車與新動力(2014年2期)2014-02-27 12:10:15
