地面三維激光掃描儀測距測角精度分析
2017-07-05 14:19:29鄒進貴朱勇超
地理空間信息 2017年5期
關鍵詞:測量
童 魁,鄒進貴,朱勇超
地面三維激光掃描儀測距測角精度分析
童 魁1,鄒進貴2,朱勇超2
(1.中鐵第四勘察設計院集團有限公司,湖北 武漢 430063;2.武漢大學 測繪學院,湖北 武漢430079)
地面三維激光掃描儀的測量精度主要由掃描儀的測距測角精度決定。以VZ-400型掃描儀為例設計實驗,運用基線比較法得到其測距精度為2 mm;通過建立測角誤差模型得到其測角精度為1.5"。研究結果表明,在一定條件下,VZ-400型掃描儀的測距測角精度均符合儀器的標稱精度。
掃描儀;測距;測角;精度

近年來,地面三維激光掃描系統已取得了蓬勃發展[1]。隨著點云測量精度的提高,其在變形監測領域的應用越來越廣泛。目前,國內對掃描儀精度評定的研究還處于初級階段,張毅[2]等從掃描儀的測量原理出發,建立了誤差模型;齊建偉[3]等采用一種基于空間拓撲關系的方法評價了掃描儀平面位置精度;劉金輝[4]從測量距離、入射角度和目標顏色等方面研究了掃描儀的測量精度。本文針對VZ-400型掃描儀進行實驗設計,分析了其測距測角精度。
1 地面三維激光掃描儀工作原理
地面三維激光掃描系統主要由地面三維激光掃描儀、計算機、外接電源、三角架、標靶及軟件系統構成。其中地面三維激光掃描儀內部主要由測距系統、測角系統、成像系統和內部校正系統組成。
1.1 測距系統
測距系統是地面三維激光掃描儀的重要組成部分,一般由發射器、接收器、時間或相位計算器和微電腦組成。激光測距的原理主要有4種:脈沖測距法、相位測距法、激光三角法和脈沖—相位式測距法。在測繪領域,對于遠距離觀測多采用基于脈沖測距法的地面三維激光掃描儀;對于近距離觀測多采用基于相位測距法和激光三角法的地面三維激光掃描儀。
1.2 測角系統
目前,應用最多激光掃描技術包括光機掃描、電鏡掃描、多棱鏡掃描和全息光柵掃描等。地面三維激光掃描系統通過內置伺服驅動馬達系統,精確控制多面反射棱鏡的轉動,使脈沖激光束沿橫軸或縱軸方向快速掃描。測量可得每個脈沖激光的橫向掃描角度α和縱向掃描角度β。
2 測距精度實驗與分析
類似于傳統測量儀器的測距精度研究方法,先將地面三維激光掃描儀置于基準場,再將測量結果與檢定場的數據進行比較,進而判斷儀器參數是否準確。目前,較為常用的測距精度評定方法是六段解析法和基線比較法[5-6]。六段解析法是Schwendener H R在1971年提出的,通過對觀測數據進行平差處理,即可獲得加常數,無需標準基線。該方法的優點是加常數的檢測精度很高;缺點是只能檢測加常數,無法獲取乘常數。基線比較法則可同時解算加常數和乘常數,先通過加常數改正,得到準確的距離基準;再通過基線比較法對地面三維激光掃描儀的測量數據進行處理,得到加常數和乘常數,從而確定地面三維激光掃描儀的測距精度。
2.1 實驗方案設計
測距精度測試包括六段解析模型和基線比較模型的確定。首先通過六段解析模型,獲取全站儀的距離加常數,從而精確確定檢校場六段精確距離值;然后運用地面三維激光掃描儀測定檢校場的21段距離;再通過基線比較模型,平差得到地面三維激光掃描儀的加常數和乘常數;最后確定其測距精度。
2.2 檢校場和誤差模型的建立
實驗之前,要建立檢校場。選擇直線長度為100 m的檢校場地,按照標準六段解析模型,在直線上設置控制點A~G。其中AB段、BC段的距離為10 m,CD段、DE段、EF段和FG段的距離為20 m。
2.2.1 六段解析模型
六段解析模型又稱六段全組合法,觀測方法是在A、B、C、D、E、F和G點上架設全站儀,按全組合的方法獲取21條邊的觀測距離Di,進而組成誤差方程:

2.2.2 基線比較模型
在六段解析模型確定的檢校場中,將VZ-400型掃描儀和平面靶標按照同樣的測距方法完成測距工作;再通過軟件計算每段掃描測量的距離Di(i=1,2,…,21),組成誤差方程為:

式中,k為加常數;R為乘常數;Di為觀測值。
2.2.3 實驗數據的獲取與處理
1)基準數據的獲取與處理。根據實驗方案,通過高精度全站儀建立檢校場。依據六段解析模型,采用TCRP 1201全站儀完成6站的測量工作,對21段全組合距離進行精確測量,TCRP 1201的測距精度為1±1.5 ppm。經過處理后,A至B~G點的距離可作為標準參考值,見表1。
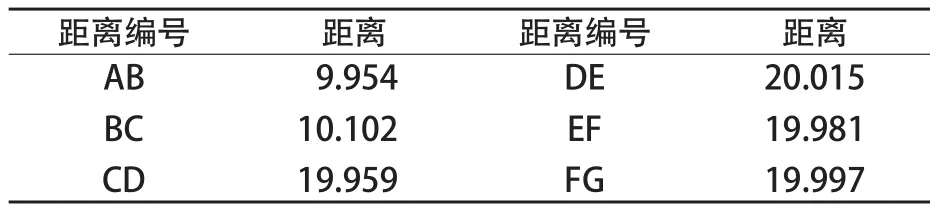
表1 六段距離標準值/ m
2)VZ-400型掃描儀數據的獲取與處理。在基準場,按照六段解析模型,運用VZ-400型掃描儀分別對21段距離進行掃描測量,每段距離測量3次;再通過RiSCAN PRO軟件進行靶標識別,并提取靶標中心坐標[7],進而反算出距離。VZ-400型掃描儀測量的21 段距離平均值如表2所示。常數改正后的距離與標準值進行比較,結果見圖1。經過改正后,測距誤差均在2 mm以內。
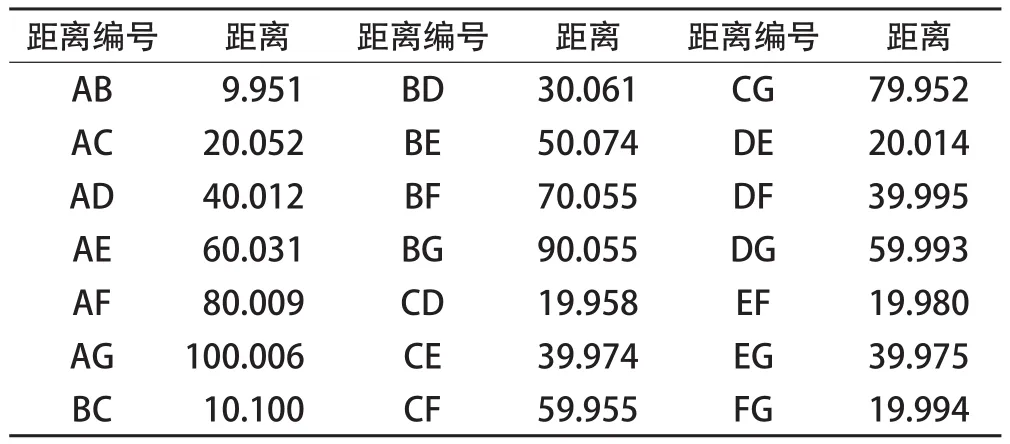
表2 VZ-400型掃描儀21段距離平均值/m
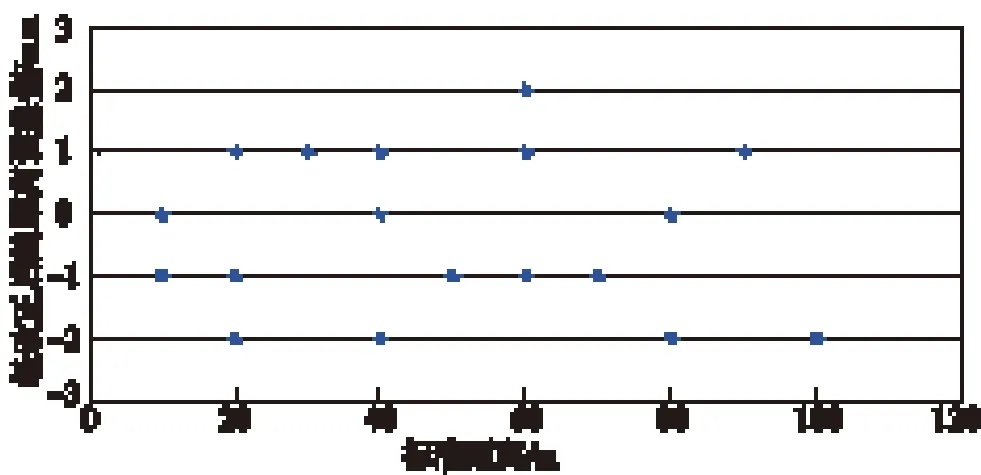
圖1 VZ-400型掃描儀經改正后的測距誤差
3 測角精度實驗與分析
地面三維激光掃描儀的測角原理是通過掃描儀繞豎軸旋轉確定水平角,激光束通過旋轉棱鏡沿垂直方向旋轉,通過旋轉的角度確定豎直角。與傳統的測角儀器不同,地面三維激光掃描儀在測量過程中無法通過盤左盤右測量來消除視準軸誤差[8-9]。在其工作過程中,以下因素會造成水平角度精度缺失:①激光發射光束未垂直于橫軸引起的水平角誤差ΔH1;②橫軸傾斜引起的水平角誤差ΔH2;③豎軸傾斜引起的水平角誤差ΔH3。因此,需針對VZ-400型掃描儀設計實驗方案,測量激光束不垂直于橫軸誤差、橫軸傾斜誤差和豎軸傾斜誤差。
3.1 實驗方案設計
首先通過高精度測角全站儀建立滿足實驗要求的檢校場,以處理后的全站儀測量角度為參考值;再將掃描儀置于同樣的點上,完成對目標點的掃描工作;最后通過建立誤差方程,解算出各參數,完成對觀測值的改正[10]。
3.2 檢校場和誤差模型的建立
在體育場上選取一條直線,在直線上每隔5 m標記一個點,共標記8個點,編號為A~H。測站點S位于AH的中垂線上,且與直線的垂直距離為50 m,將其作為儀器放置點。
3.2.1 水平角誤差ΔH1
激光束不垂直于橫軸對水平角觀測值的影響如圖 2a所示,由幾何關系可得:
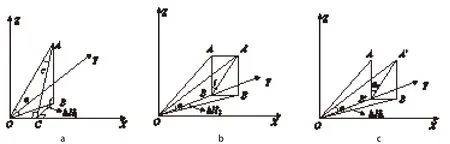
圖2 測角誤差模型

由于c和ΔH1均非常小,因此可寫成:

3.2.2 水平角誤差ΔH2
掃描儀的橫軸不與豎軸垂直所產生的誤差用i表示,其對水平角觀測值的影響如圖2b所示,由幾何關系可得:

由于i和ΔH2均非常小,因此可寫成:

3.2.3 水平角誤差ΔH3
掃描儀的豎軸與重力線方向不平行所引起的水平角誤差對水平角觀測值的影響如圖2c所示,由幾何關系可得:

由于ax和ΔH3均非常小,因此可寫成:

3.3 實驗數據的獲取與處理
3.3.1 基準數據的獲取
在水平角測量精度檢校場中,將TCRP1201型全站儀置于S點上,并對中整平。選取校場中某固定靶標O為起始零方向,采用基于PDA的多測回測角軟件完成對A~H點的角度測量工作。TCRP1201型全站儀的測角精度為1",優于VZ-400型掃描儀的角度分辨率1.8"。因此,將TCRP1201型全站儀的角度測量作為標準值,其測量結果見表3。

表3 全站儀角度測量均值
3.3.2 VZ-400型掃描儀數據的獲取與處理
將VZ-400型掃描儀架設在S點上,將靶標分別架設在A~H點處,掃描儀對中整平后,對O及A~H 號靶標進行掃描,每個點掃描3次。掃描結束后,通過RiSCAN PRO軟件從點云中提取靶標的中心坐標。
地面三維激光掃描儀采用的坐標系是以儀器中心為坐標原點的站心坐標系,在三維激光掃描點云數據中提取靶標點坐標,求得每個方向3次掃描的水平角φ與高度角α,取平均求得各方向間的夾角,見表4。
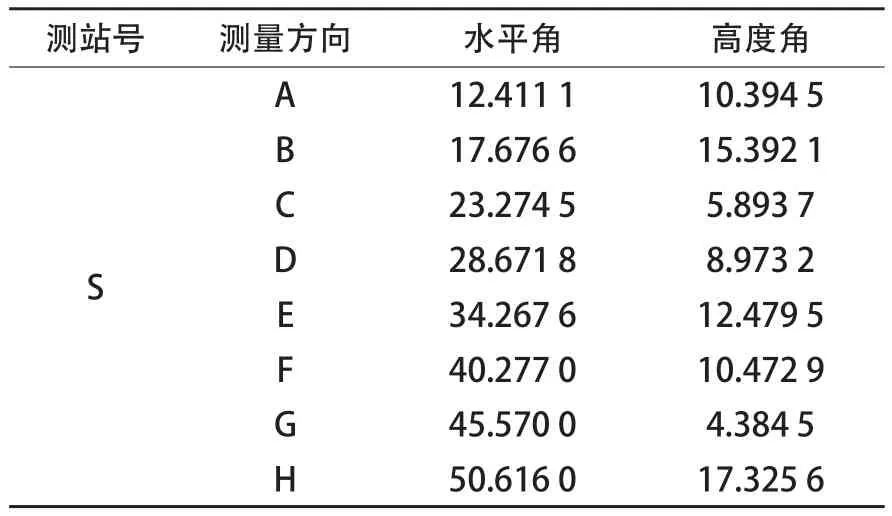
表4 VZ-400型掃描儀角度測量均值/(°)
激光束不垂直于橫軸的誤差為c,其對水平角觀測值的影響為c/cosα;橫軸傾斜誤差為i,其對水平角觀測值的影響為itanα;豎軸傾斜誤差為ax,其對水平角觀測值的影響為axtanα,進而建立觀測值方程為:

誤差方程為:
水平角中誤差為:

根據基準檢校場的測量數據和掃描儀獲得的水平角和高度角,通過間接平差模型解算得到激光束不垂直于橫軸誤差c、橫軸傾斜誤差i和豎軸傾斜誤差ax。
c=0.000 37°,i=0.002 23°,ax=0.002 23°
根據式(12)求得改正數vi,再根據式(13)求得水平角中誤差為:
3.3.3 實驗結果分析
將經過上述3項誤差改正后的水平角觀測值與標準值進行比較,其差值結果如圖3所示。經過改正后,方向值與標準值最大相差2.6"。
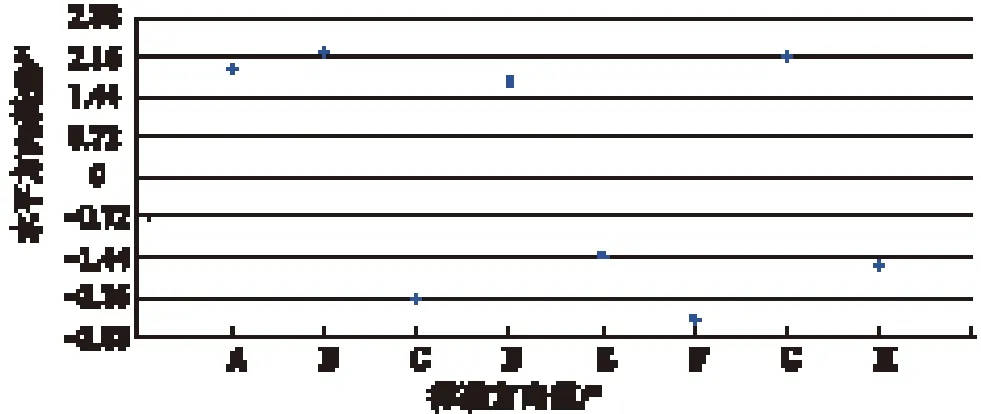
圖3 掃描儀水平角度誤差
4 結 語
通過本文的研究分析可知,VZ-400型掃描儀的測距精度在100 m范圍內,可達到2 mm,符合儀器的標稱精度2 mm/100 mm;其測角精度在短距離范圍內,可達到1.5",小于儀器的標稱精度1.8"。該檢校測量原理及方法,可為其他類型激光掃描儀的精度檢定提供一定理論和實驗依據。
[1] 馬立廣.地面三維激光掃描測量技術研究[D].武漢:武漢大學,2005
[2] 張毅,閆利,楊紅,等.地面三維激光掃描的系統誤差模型研究[J].測繪通報,2012(1):16-19
[3] 齊建偉,朱恩利.三維激光掃描測量內符合精度試驗研究[J].地理空間信息,2012,10(4):20-22
[4] 劉金輝.地面三維激光掃描儀測量精度試驗與分析[J].測繪與空間地理信息,2013(12):142-145
[5] 蔡慶生.地面三維激光掃描儀測距檢校與精度評定[J].測繪與空間地理信息,2015(1):217-218,221
[6] 張永彬,高祥偉,謝宏全,等.地面三維激光掃描儀距離測量精度試驗研究[J].測繪通報,2014(12):16-19
[7] 蘇曉蓓,郝剛.地面三維激光掃描標靶中心識別算法研究[J].城市勘測,2010(3):68-70
[8] 王玉鵬,盧小平,葛曉天,等.地面三維激光掃描點位精度評定[J].測繪通報,2011(4):10-13
[9] 鄭小寧,劉軍平.三維激光掃描的應用與精度分析[J].地理空間信息,2008,6(1):132-134
[10] 曹先革,張隨甲,司海燕,等.地面三維激光掃描點云數據精度影響因素及控制措施[J].測繪工程,2014,23(12):5-7,11
P204
B
1672-4623(2017)05-0091-03
10.3969/j.issn.1672-4623.2017.0052.8
童魁,碩士研究生,研究方向為精密工程測量、變形監測、點云數據處理。
2016-01-26。
項目來源:國家自然科學基金資助項目(41074025)。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
