試論新型精密滾動摩擦傳動凸輪系統在無人機上應用的可行性
2018-05-31 07:21:08崔芹芹
時代汽車 2018年1期
崔芹芹
滄州巨擎汽車配件有限公司 河北省滄州市 062461
1 對于無人機的認識
(1)無人機,簡稱UAV(Unmanned Aerial Vehicle),指不載有操作人員、利用空氣動力起飛、可以自主飛行或遙控駕駛、可以一次使用也可以回收使用的、攜有致命或非致命有效負載的飛行器。
(2)無人機的組成:無人機一般由飛機平臺系統、有效載荷系統(信息采集系統)和地面控制系統三大部分組成。飛機平臺系統和有效載荷系統組成了整個飛行器,根據負載能力和實現任務的不同,一個平臺可以搭載多套有效載荷系統,實現復雜功能。
(3)無人機家族體系龐大,當前無人機市場以固定翼和旋翼無人機為主。
(4)一種無人機光電載荷,由20X變焦可見光電視,寬/窄現場可切換長波前視紅外和重頻5Hz的脈沖激光測距機構成,緊湊安裝在25μrad穩定精度的兩軸四框架穩定上,該光電載荷下傳到地面站的圖像清晰,目標定位數據可信,定位精度滿足技術要求。
2 認為無人機有3個方面可以改進
2.1 對于20X變焦可見光CCD電視
作為主要的測量定位用光電傳感器,20X變焦可見光CCD電視除滿足連續變焦過程中成像清晰,視軸不跳動和焦面重復性好等常規要求外,還要保持足夠高的焦距輸出精度、制約變焦過程中重心的變化,以及做好與激光接受共光路的設計。
由于20X變焦可見光電視的穩定精度取決于兩軸四框架控制的穩定平臺,而兩軸四框架的傳動控制采用了導槽、導輪和凸輪傳遞,對傳遞凸輪的制造精度要求高,振動和噪聲要求嚴格。
2.2 對于無人機動力系統
盡管無人機的動力系統經常配備有:活塞發動機、渦軸發動機、渦槳發動機、渦噴發動機、渦扇發動機、微型電動機/內燃機/噴氣發動機。值得特別指出的是,由于歷史原因,目前多數無人機采用活塞發動機,雖然活塞發動機只適用于低速小型無人機,局限性較大;而推力變化范圍大、耗油率低、高空性能好的渦扇發動機在無人機動力裝置將占有重要地位。無人機發動機類型的選擇不但與無人機要求的性能有關而且與當時的發動機技術水平、研制進度要求及用戶的經濟承受力等有關。但從無人機動力的裝置選擇情況來看,活塞式發動機適用于低谷、中低空的偵查、監視無人機及長航時無人機,飛機起飛質最較小一般為幾百千克。所以目前仍得到廣泛的采用。
凡是活塞式發動機都具有配氣凸輪(軸),凸輪制造工藝復雜,要求精度高,在某種程度上,限制了活塞式發動機的使用性能和推廣。
2.3 對于多旋翼無人機
多旋翼無人機有6種工作狀態,分別為:垂直運動、俯仰運動、滾轉運動、偏航運動、前后運動、側向運動。
四旋翼飛行器通過調節四個電機轉速來改變旋翼轉速,實現升力的變化,從而控制飛行器的姿態和位置。四旋翼飛行器是一種六自由度的垂直升降機,但只有四個輸入力,同時卻有六個狀態輸出,所以它又是一種欠驅動系統。

圖1 四旋翼飛行器的結構形式
四旋翼飛行器的電機1和電機3逆時針旋轉的同時,電機2和電機4順時針旋轉,因此當飛行器平衡飛行時,陀螺效應和空氣動力扭矩效應均被抵消。
在上圖中,電機1和電機3作逆時針旋轉,電機2和電機4作順時針旋轉,規定沿 x軸正方向運動稱為向前運動,箭頭在旋翼的運動平面上方表示此電機轉速提高,在下方表示此電機轉速下降。
通過對多旋翼無人機的研究,認為四個旋翼電機是處于各自獨立的工作狀態,問題是旋翼電機在旋翼上是固定的位置,旋槳全部處在同一舉升水平上。電機四角對稱中心的設計限制住了6個輸出狀態,改進旋槳將達到對于中心在增倍旋轉的同時可以伸縮運動,采用這樣的結構將使4個輸入力控制6個飛行狀態,變得更加靈活。
3 發明專利推介
3.1 本發明人獲得專利
《新型精密滾動摩擦傳動凸輪傳動系統》,獲得時間:2016年8月10日,專利號:ZL201620150868.4。
由于典型的凸輪傳動,沖程量一般不可以調解,傳動使用噪音大,振動大,傳動磨損大,為了解決以上問題,本發明人對凸輪傳動系統進行研究與開發,目的是要改進原有曲柄曲拐式凸輪傳動為本項目內嵌偏心齒輪軸、外配內齒圈加滾動軸承的全新的傳動方式。
3.2 核心技術及創新點
本設計為內外雙層凸輪,往復行程可以從0~e1+e2,自由精確調節,調節范圍大,精度高。(以精密齒輪制造精度可以達到±0.01mm)。
本凸輪傳動系統可以從偏心距為0到2倍偏心齒輪軸的行程調節量,做到無極精密調節,并且實現了凸輪傳動的連續的勻速滾動摩擦。從該技術的結構特點可以看出,本發明和傳統的凸輪傳動比較,有較大的傳動原理上的突破,內外偏心齒輪傳動的凸輪完全可以應用在更高速旋轉的機械裝置上采用。
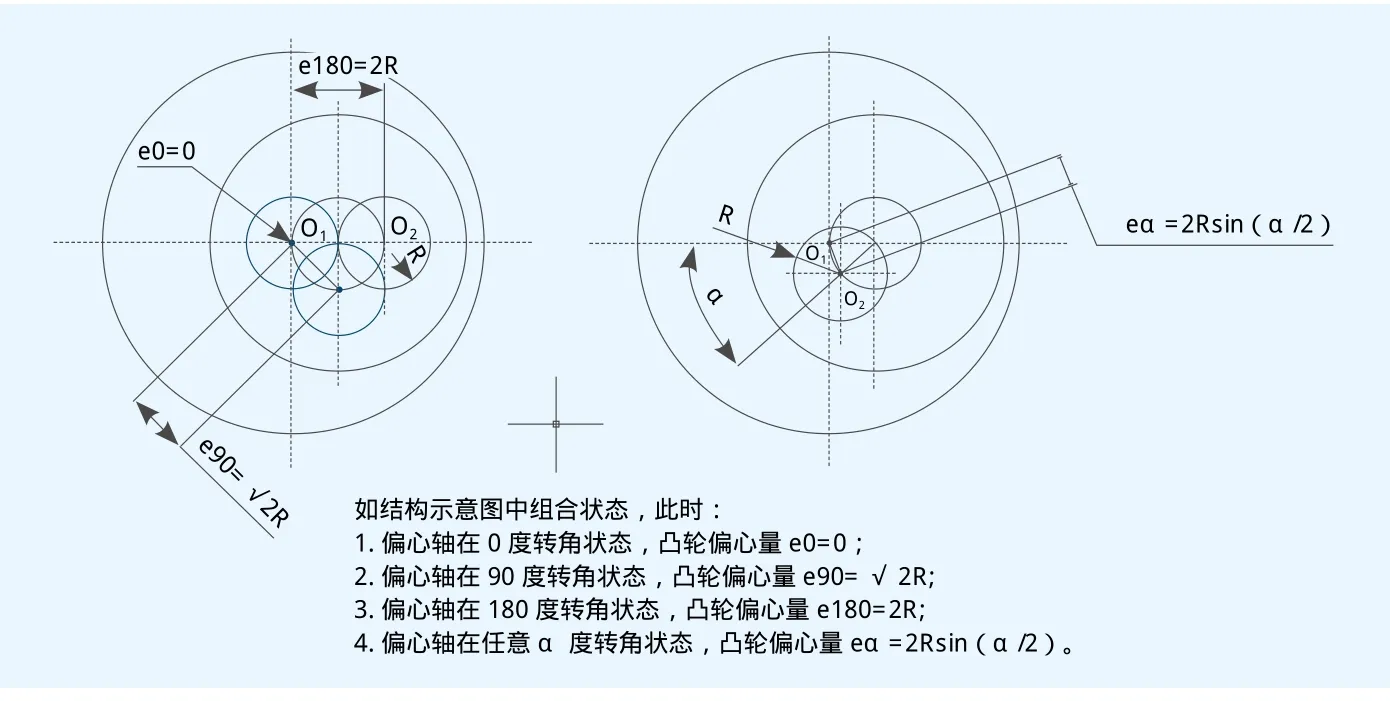
圖2 內外凸輪組合求各轉角狀態下凸輪的偏心量調節示意圖

3.3 凸輪專利的原理簡介
本設計為內外雙層凸輪,往復行程可以從0~e1+e2,自由精確調節,調節范圍大,精度高。(以精密齒數制造精度可以達到±0.01mm)(偏心量調解 見圖2《偏心量調節示意圖》)。
該凸輪傳動系統的主要原理為偏心外齒輪軸嵌入內齒圈,齒圈外圓鑲嵌滾動軸承。偏心外齒輪軸嵌入內齒圈的初裝角度,即決定了外齒圈的偏心量(外齒圈和滾動軸承為一體)。因此當偏心軸轉動時外齒圈也同樣繞著偏心軸轉動,這樣外齒圈就形成了一個可以滾動摩擦的傳動凸輪。由于外凸輪為圓形,并且可以鑲有滾動軸承;升降傳動軸外嵌軸承,這樣在相對傳遞中可以實現始終接觸不脫離無沖擊的滾動摩擦。
3.4 本專利發明的優點
(1)傳動環節簡單、為Ⅰ級傳遞、功率損失小、機械效率高。(2)傳動系統各環節的在潤滑和滾動摩擦狀態下工作,傳動噪聲小。(3)節能、減噪、符合國家“節能減排”要求。(4)可以滿足較高頻率的試驗要求。(5)調節往復行程方便、快捷,提高工作效率。(6)往復的行程可以達到精確調解。(7)體積小、重量輕。(8)具有在機械行業廣泛推廣價值。
4 認為本發明針對上述3方面的不足可以進行改善:
(1)無人機穩定平臺的控制,由內外框架的兩套控制子系統實現,均使用PWM控制直流電動機驅動,也就是說由回轉運動要轉變成導輪、導槽與凸輪的直線運動。CCD電視控制要求實測焦距輸出精度在優于2%的條件下,凸輪傳動誤差精度為0.61°,如果采用《新型精密滾動摩擦傳動凸輪傳動系統》專利,可以實現凸輪的超精密加工(因為該凸輪為圓形);可以在一次凸輪設計制造中,獲得N個調整角度和行程量。對于角度可以為 0 min ~ α max ;對于沖程可以由 0 min ~2e max(e為內外凸輪偏心量)進行無極調節,這樣凸輪誤差可以精準到1個齒的分度圓的精密角度(現在精密超小模數齒輪的加工技術已經相當成熟),通過應用此凸輪傳動系統后,兩軸四框架穩定平臺結構的設計與控制更為合理,完全可以超過要求的誤差精度,具有實用的意義和推廣價值。
(2)本發明專利《新型精密滾動摩擦傳動凸輪傳動系統》從結構原理和制造工藝要求可以看出,完全適用于無人機活塞式發動機的配器氣凸輪(軸)系統的精密復雜的凸輪設計和制造。如果采用本專利設計,可以使得配氣凸輪(軸)的凸輪制造和角度、沖程調節變得更加精密、方便、體積變得更小;另外對于發動機的曲軸(曲拐凸輪)設計和制造也有一定的參考作用。
(3)從旋翼無人機的四個旋翼傳動原理可以看出:旋翼的速度、角度和旋翼的舉升位置決定了無人機的6個自由度的飛行狀態。這種狀態的動力來自于四臺獨立的電動機驅動。電動機驅動旋轉翼的速度、角度和旋翼的舉升位置即實現了無人機的啟動動力和操控狀態的控制。
本專利發明人經過工作實踐,對于原專利進行了延伸設計,設計了銑刀凸輪進給系統。
經過對于旋翼無人機6種工作狀態的粗淺認識,認為該專利的延伸設計完全可以應用到旋翼電機傳動和旋轉翼的速度、角度、舉升位置的控制。四個旋翼電機是處于各自獨立的工作狀態,旋翼電機在旋翼上是固定的位置,旋槳全部處在同一舉升水平上。電機四角對稱中心的設計限制住了6個輸出狀態,改進旋槳將達到對于中心在增倍旋轉的同時可以伸縮運動,采用這樣的結構將使4個輸入力控制6個飛行狀態,變得更加靈活。
該設計原理如下:在原無級精密凸輪傳動的基礎上,擴大了使用范圍的設計,該設計的基本結構是:凸輪傳動系統(1),偏心凸輪的外圓環改為小模數齒圈,件號19為第一級傳動齒輪,件號11為第二級傳動齒輪,第一級第二級傳動齒輪由兩根固定軸和輪軸與軸承固定板件號5裝配在一起,輪軸固定板5由件號6(四塊定位導向滑板)夾持在機架8的配合滑道中。
其傳動過程是:當偏心凸輪1在電機(四臺電機分別帶動一個凸輪軸)。電機的轉速通過凸輪外齒圈(120齒;延伸設計圖為驅動手輪13)傳動給第一級齒輪(60齒),一級齒輪傳遞給二級齒輪(30齒),這樣就實現了1:4的增速傳動。
該系統由于固定一級二級齒輪軸的固定板5在傳動中處于在機架上可以自由上下滑動狀態(件號6),在導向滑板的控制下能夠做到精密的上下直線運動。
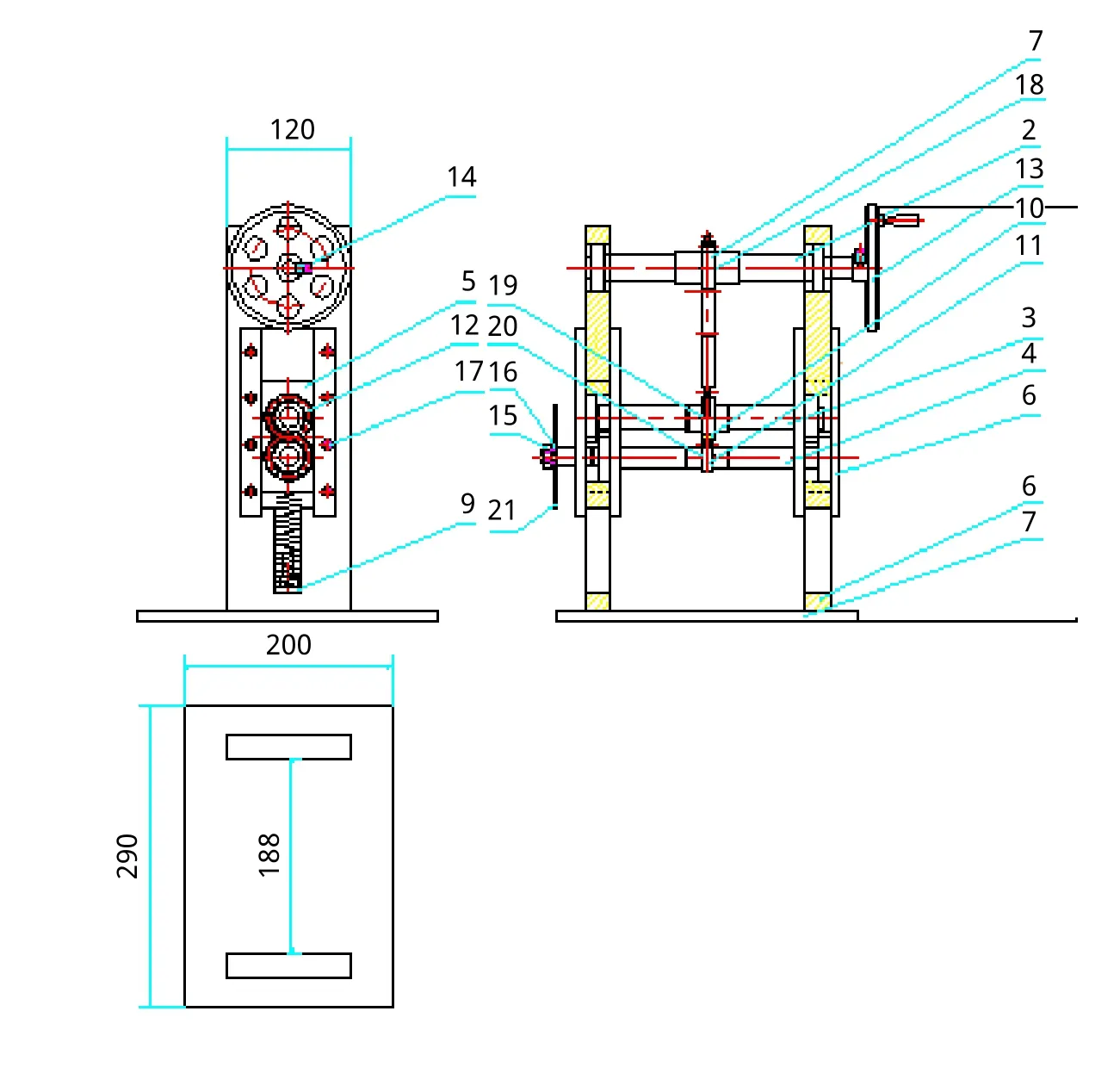
圖3 銑刀凸輪進給系統傳動原理演示器總裝圖
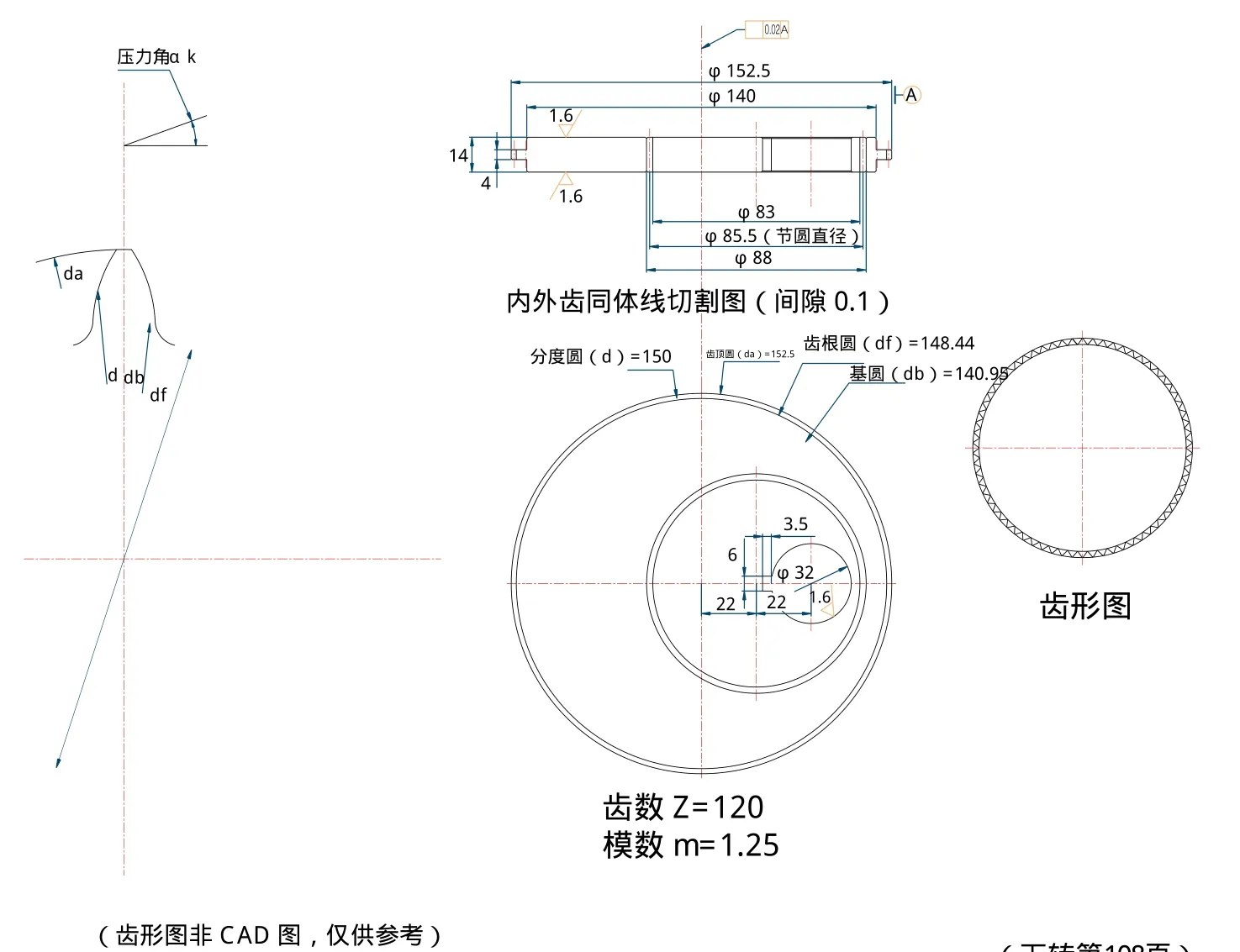
圖4 齒形傳動凸輪(銑刀進給系統)

圖5 中間傳動軸齒輪
為了使固定板5能夠隨著凸輪沖程的減少而上升,保證3個齒輪傳動系的不脫離接觸,在固定板下面設有支撐彈簧,件號9(彈簧座)。
在二級齒輪軸的一端設有螺旋翼(原設計為銑刀盤)。
專利的延伸設計使得凸輪和齒輪傳動合理的結合在一起,實現了動力輸出軸的轉速增倍(本設計是1:4)
從該設計的結構圖可以看出:旋翼電機經過凸輪齒輪1齒輪2實現了速度的倍增(4倍)和螺旋翼在旋翼端的舉升位置可以由中心向外進行滑動,這樣就實現了4個舉升器對于中心的旋轉位置是可以操控的。本發明人認為通過舉升旋轉翼4個相對位置的變化,有可能實現無人機的6個飛行狀態的控制。附 銑刀凸輪進給系統(傳動凸輪演示器)總裝圖、齒形傳動凸輪、中間傳動軸齒輪、銑刀進給傳動軸齒輪和軸承支撐板。

圖6 軸承支板
猜你喜歡
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年2期)2014-02-27 12:10:15
汽車與新動力(2013年5期)2013-03-11 16:08:17