單模態(tài)驅(qū)動的非對稱定子結(jié)構(gòu)塔形超聲電機(jī)
2017-07-01 23:14:59陳乾偉鞠全勇高素美楊傳森
振動、測試與診斷 2017年3期
陳乾偉, 鞠全勇, 高素美, 楊傳森
(金陵科技學(xué)院機(jī)電工程學(xué)院 南京,211169)
?
單模態(tài)驅(qū)動的非對稱定子結(jié)構(gòu)塔形超聲電機(jī)
陳乾偉, 鞠全勇, 高素美, 楊傳森
(金陵科技學(xué)院機(jī)電工程學(xué)院 南京,211169)
現(xiàn)有單模態(tài)驅(qū)動超聲電機(jī)或者只能單向運(yùn)動,或者存在嚴(yán)重磨損。針對此問題,提出了一種單模態(tài)驅(qū)動雙向運(yùn)動的塔形超聲電機(jī)。塔形電機(jī)由非對稱結(jié)構(gòu)塔形定子和動子構(gòu)成。塔形定子采用非對稱的蘭杰文振子結(jié)構(gòu),設(shè)計有低階和高階非對稱工作模態(tài)以及相應(yīng)的壓電陶瓷片極化布置方案,通過模態(tài)切換就可以實(shí)現(xiàn)電機(jī)的單模態(tài)驅(qū)動和正反向運(yùn)動。分析了電機(jī)的工作原理,制作了原理樣機(jī),并對樣機(jī)進(jìn)行了模態(tài)實(shí)驗(yàn)和機(jī)械特性實(shí)驗(yàn)。結(jié)果表明,當(dāng)A相單相激勵,電機(jī)工作在高階工作模態(tài),動子正向運(yùn)行,最大速度為112 mm/s,最大輸出力為2N;當(dāng)B相單相激勵,電機(jī)工作在低階工作模態(tài),動子反向運(yùn)行,最大速度為94 mm/s,最大輸出力為3 N。
單模態(tài); 非對稱; 超聲電機(jī); 壓電
引 言
直線超聲電機(jī)(linear ultrasonic motor,簡稱LUSM)是在超聲頻域利用壓電陶瓷的逆壓電效應(yīng)進(jìn)行工作的直線作動器。它具有低速大輸出力、斷電自鎖、無電磁干擾、定位和速度控制精度高等優(yōu)點(diǎn),在精密驅(qū)動等領(lǐng)域有著廣泛的應(yīng)用[1-10]。
直線超聲電機(jī)分為雙模態(tài)驅(qū)動和單模態(tài)驅(qū)動兩類[1-5]。和雙模態(tài)超聲電機(jī)相比,單模態(tài)直線超聲電機(jī)對工作模態(tài)頻率一致性要求寬松,有利于電機(jī)結(jié)構(gòu)的簡單化[7-10]。
Sashida等[7]提出了一種單模態(tài)驅(qū)動的傾斜動子結(jié)構(gòu)的振動片形超聲電機(jī),該電機(jī)的工作模態(tài)只有1階縱振模態(tài),因此只能單向運(yùn)動,且由于采用傾斜動子結(jié)構(gòu),導(dǎo)致電機(jī)運(yùn)行時磨損嚴(yán)重。He等[8]提出了一種單模態(tài)驅(qū)動的矩形板式直線超聲電機(jī),解決了文獻(xiàn)[7]電機(jī)存在的問題,但由于矩形板式結(jié)構(gòu)的局限,使得該電機(jī)能量利用率不高。Peter等[9]提出了一種單模態(tài)驅(qū)動的傾斜動子超聲電機(jī),其借鑒了文獻(xiàn)[8]電機(jī)的方法來實(shí)現(xiàn)電機(jī)的正反向運(yùn)動,并采用桿式定子結(jié)構(gòu)和柔性夾持提高能量利用率;但由于采用了傾斜動子結(jié)構(gòu),導(dǎo)致電機(jī)運(yùn)行時磨損嚴(yán)重。此外采用疊層壓電陶瓷作為驅(qū)動元件,成本較高。陳乾偉等[10]提出了一種單模態(tài)驅(qū)動的傾斜動子塔形超聲電機(jī),在借鑒文獻(xiàn)[9]電機(jī)的基礎(chǔ)上,通過采用塔形定子結(jié)構(gòu)和與之相適應(yīng)的兩個工作模態(tài),實(shí)現(xiàn)電機(jī)的正反向運(yùn)動。由于該電機(jī)采用普通的PZT壓電陶瓷片作為驅(qū)動元件,解決了電機(jī)成本較高的問題;但同樣由于采用傾斜動子結(jié)構(gòu),導(dǎo)致電機(jī)運(yùn)行時磨損嚴(yán)重。
上述單模態(tài)超聲電機(jī)存在以下缺點(diǎn):能量利用率不高,只能單向運(yùn)動,成本較高,磨損嚴(yán)重。這些問題限制了上述電機(jī)的實(shí)際使用。針對此,筆者提出了一種含非對稱塔形定子的單模態(tài)驅(qū)動雙向運(yùn)動的直線超聲電機(jī)[11]。
1 非對稱塔形定子與塔形超聲電機(jī)
1.1 非對稱結(jié)構(gòu)的模態(tài)轉(zhuǎn)換
電機(jī)定子采用圖1(a)所示的“塔形”結(jié)構(gòu)作為其初始結(jié)構(gòu),此結(jié)構(gòu)由驅(qū)動足、圓孔、左矩形柱、右矩形柱和2個對稱的柔性鉸鏈等5個子結(jié)構(gòu)組成,其中柔性鉸鏈?zhǔn)蔷匦沃蛏吓c驅(qū)動足相連接的最薄處。采用這種結(jié)構(gòu)的超聲電機(jī),一般采用共面的對稱縱振和反對稱縱振模態(tài)作為電機(jī)的兩個正交工作模態(tài),如圖1(b),(c)所示。
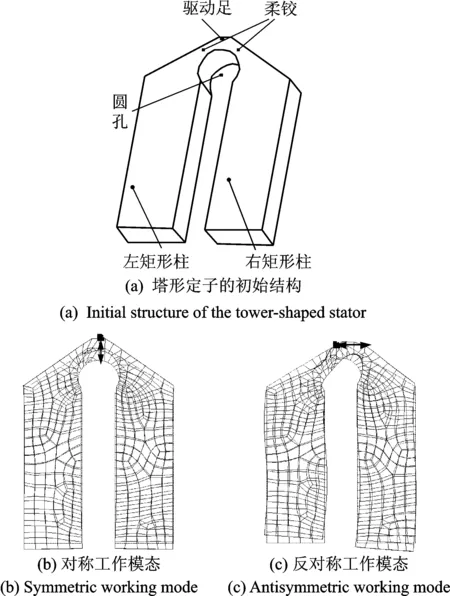
圖1 塔形定子的初始結(jié)構(gòu)及其工作模態(tài)Fig.1 Initial structure and working modes of the tower-shaped stator
經(jīng)研究發(fā)現(xiàn),當(dāng)塔形定子由對稱結(jié)構(gòu)變?yōu)榉菍ΨQ結(jié)構(gòu),尤其當(dāng)塔形定子的左、右矩形柱長度不同時(見圖2(a)),定子將產(chǎn)生明顯的模態(tài)轉(zhuǎn)換現(xiàn)象,即原來對稱結(jié)構(gòu)兩個正交的對稱縱振和反對稱縱振模態(tài)轉(zhuǎn)換為非對稱結(jié)構(gòu)的兩個非對稱縱振模態(tài)(見圖2(b),(c)),且兩個模態(tài)的頻率差變大了。左、右矩形柱長度差異越大,兩個振動模態(tài)的非對稱振動性越明顯,且模態(tài)頻率差異越大。其中:低階非對稱振動模態(tài)的縱振主要發(fā)生在長矩形柱上,而短矩形柱振動很小或幾乎不振動,因此在驅(qū)動足端面上可能形成斜直線運(yùn)動軌跡;高階非對稱振動模態(tài)的縱振主要發(fā)生在短矩形柱上,而長矩形柱振動很小或幾乎不振動,因此在驅(qū)動足端面上可能形成反向的斜直線運(yùn)動軌跡。
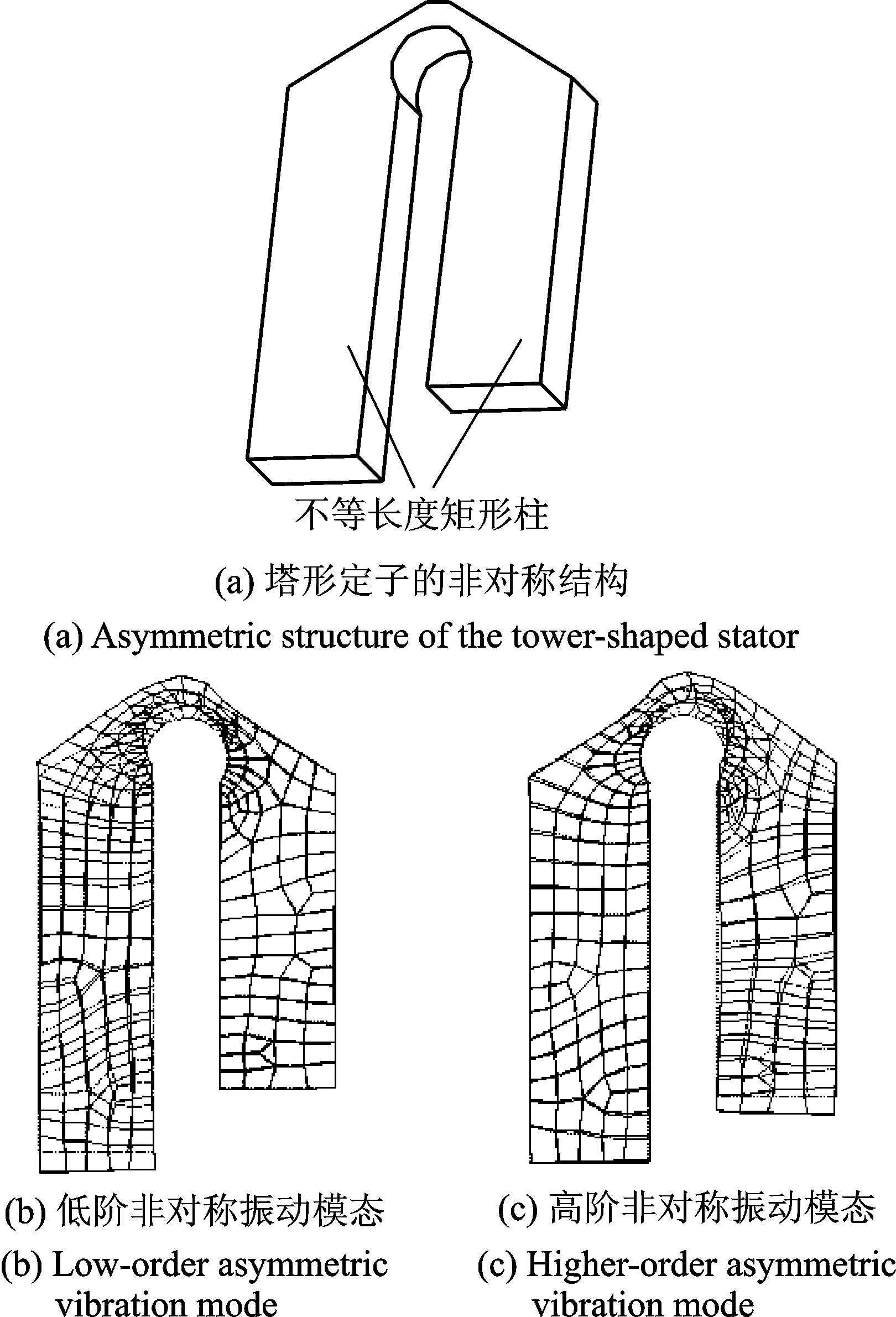
圖2 塔形定子的非對稱結(jié)構(gòu)及其非對稱振動模態(tài)Fig.2 Asymmetric structure and asymmetric vibration modes of the tower-shaped stator
1.2 驅(qū)動機(jī)理及定子設(shè)計
在非對稱塔形定子的5個子結(jié)構(gòu)中,柔性鉸鏈除了能夠放大驅(qū)動足端面的振幅,還能將塔形定子隔離成長振子、短振子和驅(qū)動足這3個相對獨(dú)立的振動子系統(tǒng)。在自由邊界條件及上述非對稱振動模態(tài)下,假設(shè)定子的彎曲變形集中發(fā)生在2個柔性鉸鏈處,而驅(qū)動足的內(nèi)部不發(fā)生變形,則非對稱塔形定子可以簡化為由長振子、短振子和驅(qū)動足3個子系統(tǒng)組成的簡化模型,如圖3所示。其中2個柔性鉸鏈和驅(qū)動足端面可以簡化為3個點(diǎn),驅(qū)動足可以簡化為由上述3個點(diǎn)圍成的等腰三角形質(zhì)量塊。等腰三角形質(zhì)量塊的頂點(diǎn)為驅(qū)動足端面,驅(qū)動足端面的靜止位置與坐標(biāo)系xyz的原點(diǎn)O重合,等腰三角形質(zhì)量塊的底角為θ。
由于長、短矩形柱的1階縱振頻率不同,導(dǎo)致對稱結(jié)構(gòu)塔形定子的對稱縱振和反對稱縱振模態(tài)轉(zhuǎn)化為非對稱結(jié)構(gòu)塔形定子的兩個非對稱縱振模態(tài), 而且這兩個模態(tài)都是坐標(biāo)平面yOz的面內(nèi)振動。
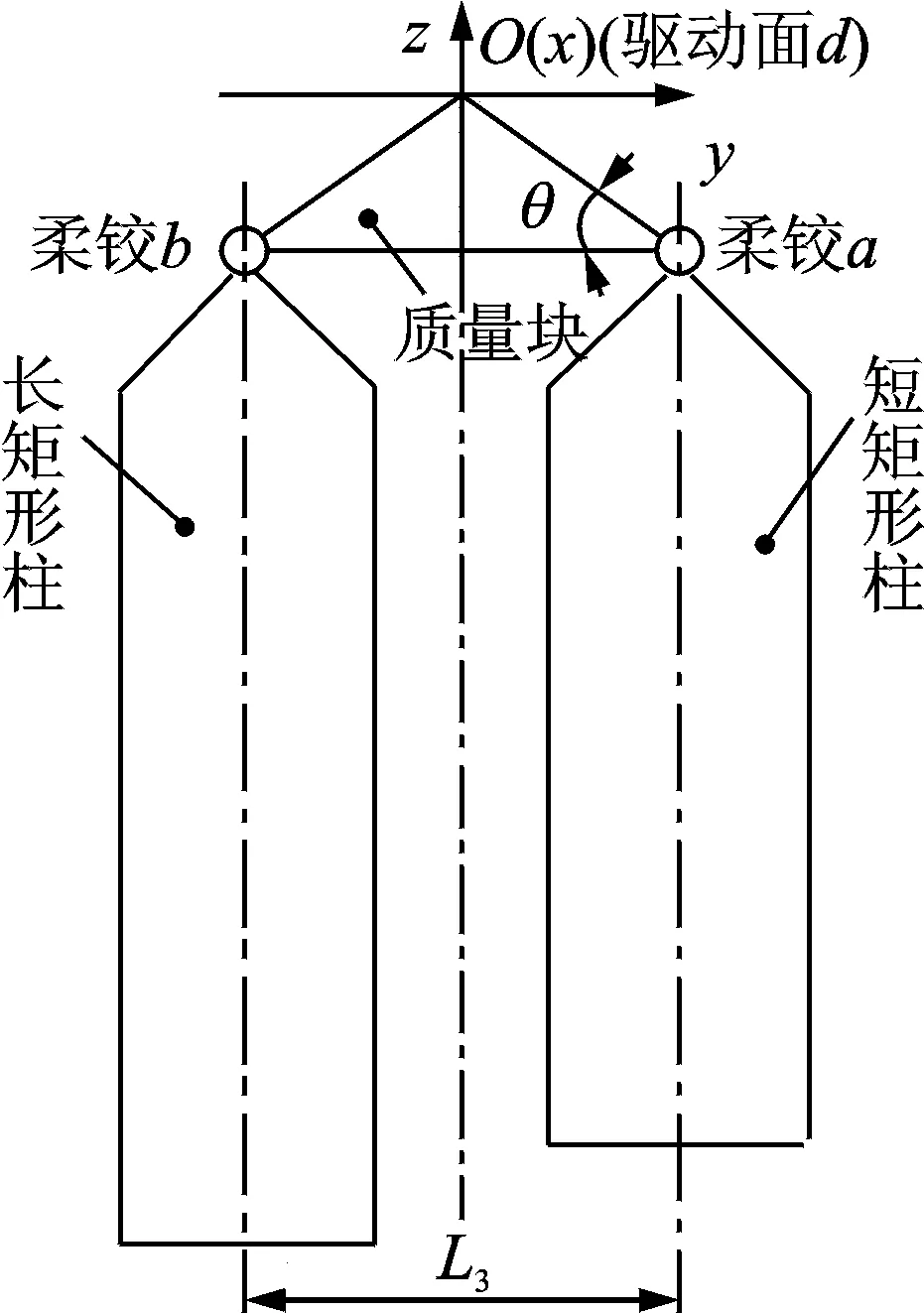
圖3 非對稱結(jié)構(gòu)塔形定子系統(tǒng)的簡化模型Fig.3 Simplified model of the asymmetric tower-shaped stator
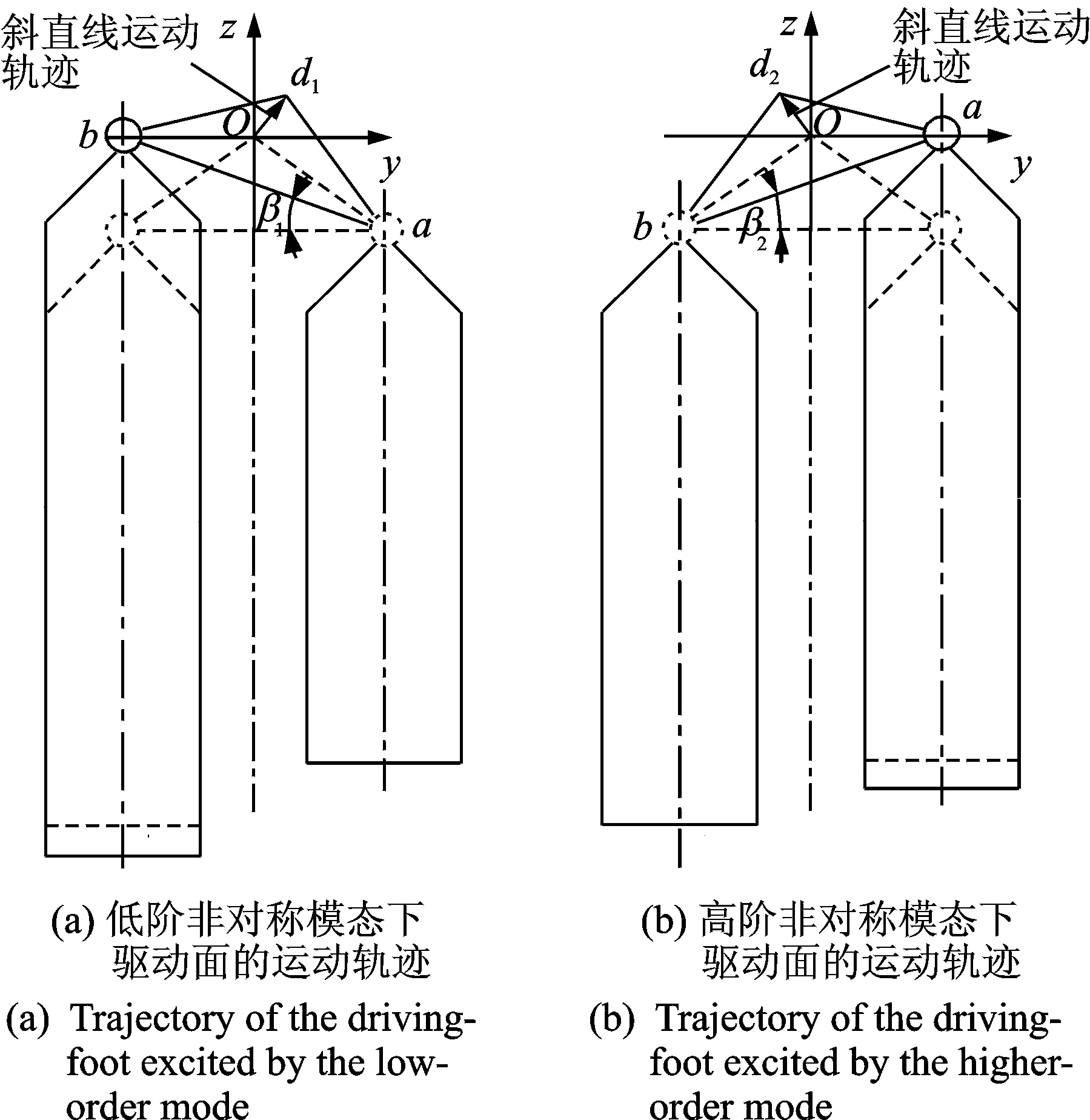
圖4 在非對稱工作模態(tài)下定子驅(qū)動足端面的運(yùn)動軌跡Fig.4 Trajectory of the stator′s driving-foot excited by the asymmetric working modes
當(dāng)?shù)碗A非對稱模態(tài)工作時,長矩形柱縱振且短矩形柱不振動,設(shè)Ub為低階振動模態(tài)下柔鉸b的振幅,則柔鉸b的運(yùn)動ub在坐標(biāo)系xyz可表示為
(1)
帶動驅(qū)動足繞柔鉸a的轉(zhuǎn)動角為

(2)
驅(qū)動足轉(zhuǎn)動β1后,驅(qū)動面d1的坐標(biāo)為
(3)
當(dāng)高階非對稱振動模態(tài)工作時,短振子縱振并且長振子不振動,設(shè)Ua為定動子未接觸時高階非對稱振動模態(tài)下柔鉸a的振幅,則柔鉸a的運(yùn)動ua在坐標(biāo)系xyz可表示為
(4)
帶動驅(qū)動足繞柔鉸b的轉(zhuǎn)動角為

(5)
驅(qū)動足轉(zhuǎn)動β2后,驅(qū)動面d2的坐標(biāo)為
(6)
由于非對稱結(jié)構(gòu)塔形定子的兩個非對稱振動模態(tài)可以在驅(qū)動足端面形成傾斜方向相反的斜直線運(yùn)動軌跡,因此可以利用這種非對稱塔形結(jié)構(gòu)及其兩個非對稱振動模態(tài)來構(gòu)成直線超聲電機(jī)。
非對稱結(jié)構(gòu)塔形定子及塔形電機(jī)的設(shè)計方案如圖5所示。塔形定子采用螺栓緊固式結(jié)構(gòu),包括一長一短兩個壓電振子。塔形定子共有4組8片壓電陶瓷,位于前端蓋和后端蓋之間。壓電陶瓷沿厚度方向極化,利用逆壓電d33效應(yīng)激發(fā)定子的振動。其中:位于短壓電振子的兩組壓電陶瓷構(gòu)成定子的A相,用于激勵定子的高階非對稱振動模態(tài);位于長壓電振子的兩組壓電陶瓷構(gòu)成定子的B相,用于激勵定子的低階非對稱振動模態(tài)。當(dāng)定子以高階非對稱振動模態(tài)工作時,定子驅(qū)動足端面將產(chǎn)生斜直線運(yùn)動軌跡,推動導(dǎo)軌正向運(yùn)動;當(dāng)定子以低階非對稱振動模態(tài)工作時,定子驅(qū)動足端面將產(chǎn)生傾斜方向相反的斜直線運(yùn)動軌跡,推動導(dǎo)軌反向運(yùn)動。
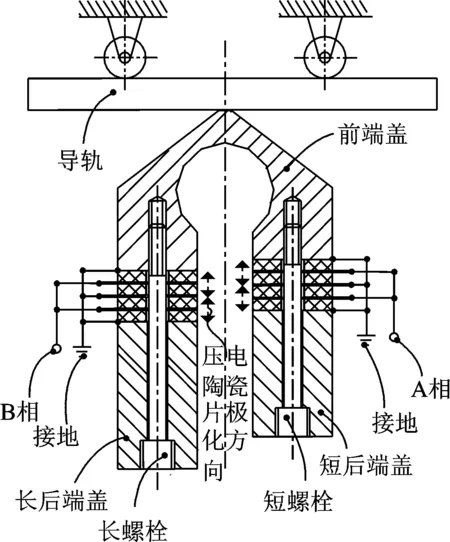
圖5 非對稱塔形定子及塔形電機(jī)的設(shè)計方案Fig.5 Design scheme of the asymmetric tower-shaped stator and the tower-shaped USM
圖6為制作的非對稱結(jié)構(gòu)塔形定子樣機(jī)。定子尺寸為35 mm×8 mm×50 mm,質(zhì)量為50 g。
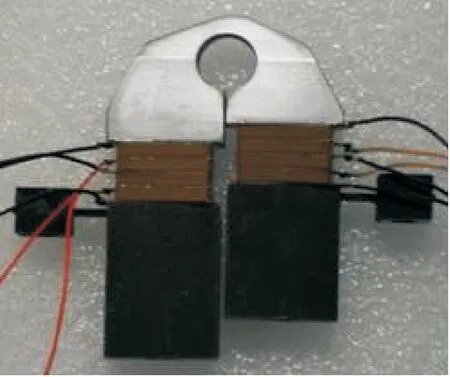
圖6 非對稱結(jié)構(gòu)塔形定子樣機(jī)Fig.6 Prototype of the asymmetric tower-shaped stator
1.3 電機(jī)整體設(shè)計
非對稱塔形定子制作好之后,還需要進(jìn)行以下電機(jī)的整體結(jié)構(gòu)設(shè)計:設(shè)計并制作相應(yīng)的動子,將定子與動子安裝在共同的基座上,選擇合適的預(yù)壓力使定子與動子相互接觸。整體結(jié)構(gòu)設(shè)計的合理與否,將嚴(yán)重影響到電機(jī)的運(yùn)行穩(wěn)定性和定位精度。
由于一般采用購買的商品導(dǎo)軌或平臺作為直線超聲電機(jī)的動子,因此在電機(jī)整體結(jié)構(gòu)設(shè)計中,主要考慮定子與動子的安裝以及定、動子間預(yù)壓力的施加。
在參考Nanomotion電機(jī)整體結(jié)構(gòu)[12]的基礎(chǔ)上,設(shè)計了如圖7所示的非對稱塔形定子驅(qū)動的基于三滾子結(jié)構(gòu)行程30 mm的一維運(yùn)動平臺。由于這種結(jié)構(gòu)采用了三滾子以及側(cè)向的螺栓和蝶簧,在消除定子安裝側(cè)隙的同時,使得定子安裝夾持的切向位移剛度遠(yuǎn)大于法向位移剛度,非常有利于作動器的穩(wěn)定運(yùn)行和精密定位[13]。
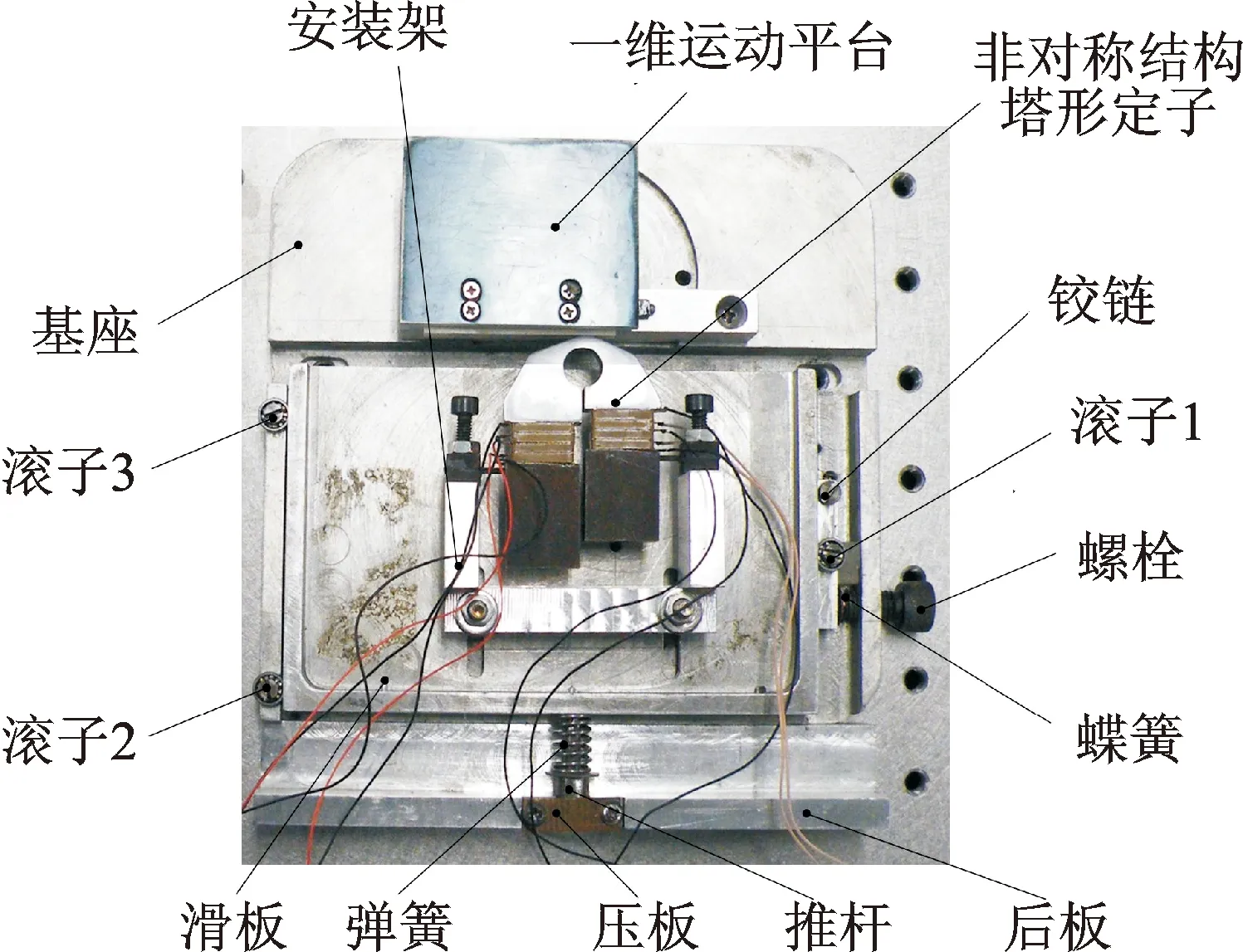
圖7 非對稱塔形定子驅(qū)動的一維運(yùn)動平臺Fig.7 The one-dimensional moving platform driven by the asymmetric tower-shaped stator
2 實(shí) 驗(yàn)
2.1 模態(tài)實(shí)驗(yàn)
采用PSV300F-B型高頻掃描激光測振系統(tǒng)對非對稱塔形定子進(jìn)行模態(tài)實(shí)驗(yàn),實(shí)驗(yàn)結(jié)果如圖8和表1所示。
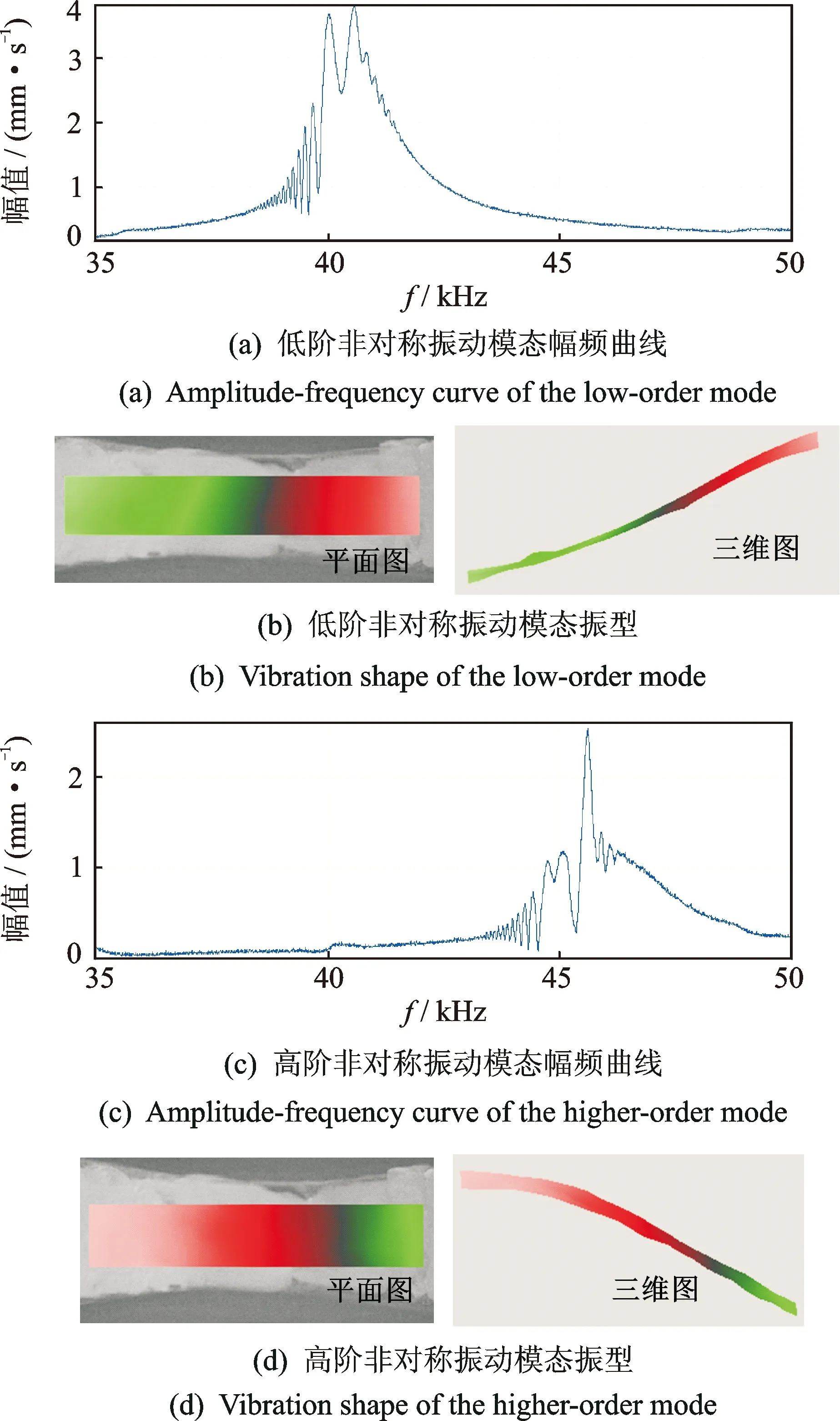
圖8 非對稱塔形定子工作模態(tài)的頻率及振型Fig.8 Frequency and vibration shapes of the asymmetric working modes
表1 塔形定子模態(tài)實(shí)驗(yàn)結(jié)果及其與ANSYS計算結(jié)果對比
Tab.1 Modal testing results of the asymmetric tower-shaped stator and comparison between the testing results and calculation results by ANSYS

對稱塔形定子實(shí)驗(yàn)?zāi)B(tài)頻率/kHzANSYS計算模態(tài)頻率/kHz誤差率/%實(shí)驗(yàn)?zāi)B(tài)振幅/μm低階非對稱振動模態(tài)40.0142.877.15法向0.80切向0.50高階非對稱振動模態(tài)45.9148.174.92法向0.70切向0.40
從實(shí)驗(yàn)結(jié)果可知:
1) 在設(shè)計的工作頻率附近,當(dāng)A相(或B相)單相激勵,定子將產(chǎn)生高階(或低階)非對稱振動模態(tài),且模態(tài)振幅足夠大,能夠驅(qū)動電機(jī)運(yùn)行;
2) 低階非對稱振動模態(tài)(或高階非對稱振動模態(tài))的實(shí)驗(yàn)結(jié)果與理論計算值相差7.15%(或4.92%)。這主要是由于用ANSYS軟件計算時將定子的金屬彈性體和PZT作為一個整體進(jìn)行計算,未考慮螺栓緊固力對定子一體化的影響,導(dǎo)致理論計算值偏高。
2.2 機(jī)械特性實(shí)驗(yàn)
非對稱結(jié)構(gòu)塔形超聲電機(jī)驅(qū)動信號平臺由1臺信號發(fā)生器和1臺功率放大器構(gòu)成。實(shí)驗(yàn)時,信號發(fā)生器發(fā)出單相正弦波電壓信號,經(jīng)功率放大器放大后,輸出驅(qū)動塔形作動器。
圖9為非對稱結(jié)構(gòu)塔形超聲電機(jī)測試系統(tǒng),它主要由圖7的一維運(yùn)動平臺和Renishaw XL-80激光干涉儀兩部分構(gòu)成,用來測試非對稱結(jié)構(gòu)塔形超聲電機(jī)的性能指標(biāo)。
圖10為非對稱結(jié)構(gòu)塔形超聲電機(jī)的機(jī)械特性曲線。由圖可知:a.在39.5 kHz~58 kHz頻率范圍內(nèi),當(dāng)A相施以單相正弦激勵信號,電機(jī)工作在高階非對稱工作模態(tài),動子正向運(yùn)行,電機(jī)最佳工作頻率為47 kHz,最大速度為112 mm/s,最大輸出力為2 N;b.在34 kHz~52 kHz頻率范圍內(nèi),當(dāng)B相施以單相正弦激勵信號,電機(jī)工作在低階非對稱工作模態(tài),動子反向運(yùn)行,最佳工作頻率為39.5 kHz,最大速度為94 mm/s,最大輸出力為3 N。
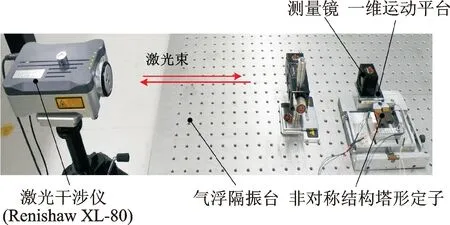
圖9 非對稱結(jié)構(gòu)塔形超聲電機(jī)測試系統(tǒng)Fig.9 Testing system of the asymmetric tower-shaped USM

圖10 非對稱結(jié)構(gòu)塔形超聲電機(jī)的機(jī)械特性曲線Fig.10 Mechanical characteristic curve of the asymmetric tower-shaped USM
3 結(jié)束語
提出了一種含非對稱塔形定子的單模態(tài)驅(qū)動雙向運(yùn)動的直線超聲電機(jī),該電機(jī)由非對稱結(jié)構(gòu)塔形定子和一維運(yùn)動平臺構(gòu)成。塔形定子是螺栓緊固結(jié)構(gòu),它采用低階和高階非對稱振動模態(tài),通過模態(tài)切換實(shí)現(xiàn)了電機(jī)在單模態(tài)驅(qū)動下正反向運(yùn)動。實(shí)驗(yàn)表明,當(dāng)電機(jī)工作在高階非對稱工作模態(tài)時,動子正向運(yùn)行,最大速度為112 mm/s,最大輸出力為2 N;當(dāng)電機(jī)工作在低階非對稱工作模態(tài)時,動子反向運(yùn)行,最大速度為94 mm/s,最大輸出力為3 N。
[1] 趙淳生.超聲電機(jī)技術(shù)與應(yīng)用[M]. 北京:科學(xué)技術(shù)出版社,2007:1-9.
[2] Ueha S,Tomikawa Y. Ultrasonic motors theory and applications [M]. Oxford:Oxford University Press,1993:1-30.
[3] 陳乾偉.新型多工作模式塔形直線超聲電機(jī)的研究 [D].南京:南京航空航天大學(xué),2012.
[4] 陳乾偉,鞠全勇,黃衛(wèi)清,等.工作模態(tài)控制解耦的塔形直線超聲電機(jī) [J].振動、測試與診斷,2015,35(1):107-111.
Chen Qianwei,Ju Quanyong,Huang Weiqing,et al.A mode-control-decoupling linear ultrasonic motor (LUSM) with a tower-type stator [J].Journal of Vibration,Measurement & Diagnosis,2015,35(1):107-111.(in Chinese)
[5] 陳乾偉,時運(yùn)來,黃衛(wèi)清.單模態(tài)驅(qū)動雙向運(yùn)動的斜動子V形直線超聲電機(jī) [J].南京航空航天大學(xué)學(xué)報,2015,47(1):139-144.
Chen Qianwei,Shi Yunlai,Huang Weiqing.Single-mode-drive-type bi-directional linearly moving ultrasonic motor with inclined slider and V-shaped stator [J].Transactions of Nanjing University of Aeronautics & Astronautics,2015,47(1):139-144.(in Chinese)
[6] 陳乾偉,鞠全勇,黃衛(wèi)清,等.新型塔形壓電式粘滑直線作動器[J].微特電機(jī),2015,43(1):28-30.
Chen Qianwei,Ju Quanyong,Huang Weiqing,et al.A new type of linear piezoelectric actuator with a tower-type stator based on stick-slip principle [J]. Small & Special Electrical Machines,2015,43(1):28-30.(in Chinese)
[7] Sashida T,Kenjo T.An introduction to ultrasonic motors [M]. London:Oxford Science Publications,1993:
60-90.
[8] He Siyuan,Chen Weishan,Tao Xie,et al.Standing wave bi-directional linearly moving ultrasonic motor [J].IEEE Transaction on Ultrasonics,F(xiàn)erroelectrics,and Frequency Control,1998,45(5):1133-1139.
[9] Peter C,Bjorn B,Dieter A.Piezoelectric motor control:US,7187102B2[P].2007-03-06.
[10]陳乾偉,黃衛(wèi)清.斜動子與塔形定子構(gòu)成的單驅(qū)雙動超聲電機(jī) [J].振動、測試與診斷,2012,32(1):28-33.
Chen Qianwei,Huang Weiqing.A single-phase-drive bi-directional moving ultrasonic motor composed of an inclined slider and a tower-type stator [J].Journal of Vibration,Measurement & Diagnosis,2012,32(1):28-33.(in Chinese)
[11]黃衛(wèi)清,陳乾偉.非對稱結(jié)構(gòu)近似塔形超聲電機(jī)及非對稱模態(tài)與電激勵方式:中國,ZL201110180280.5 [P] .2011-06-29.
[12]Wischnewskiy W,Waldbronn W.Piezoelectric drive,especially a holding frame,a friction element and a circuit configuration:US,6979934B1[P].2005-12-27.
[13]于會民,王寅,陳乾偉,等.三滾子結(jié)構(gòu)夾持的直線型超聲電機(jī) [J].機(jī)械科學(xué)與技術(shù),2012,31(2):250-254.
Yu Huimin,Wang Yin,Chen Qianwei,et al. A linear ultrasonic motor clamped with three-roller clamping scheme [J].Mechanical Science and Technology for Aerospace Engineering,2012,31(2):250-254.(in Chinese)

10.16450/j.cnki.issn.1004-6801.2017.03.011
江蘇省自然科學(xué)基金資助項(xiàng)目(BK20161102);超聲電機(jī)國家地方聯(lián)合工程實(shí)驗(yàn)室開放課題資助項(xiàng)目(NJ20160003)
2016-07-12;
2016-09-10
TM356
陳乾偉,男,1972年5月生,博士、副教授。主要研究方向?yàn)橹本€超聲電機(jī)及其應(yīng)用技術(shù)。曾發(fā)表《斜動子與塔形定子構(gòu)成的單驅(qū)雙動超聲電機(jī)》(《振動、測試與診斷》2012年第32卷第1期)等論文。 E-mail:chenqw@jit.edu.cn
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
哲學(xué)評論(2021年2期)2021-08-22 01:53:34
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
中華詩詞(2019年7期)2019-11-25 01:43:04
數(shù)學(xué)物理學(xué)報(2017年6期)2018-01-22 02:26:40
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
湖北經(jīng)濟(jì)學(xué)院學(xué)報·人文社科版(2015年8期)2015-12-29 05:53:07
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50
上海電機(jī)學(xué)院學(xué)報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:44
