基于嵌入式系統的電磁調速采礦機主控系統設計
2017-06-27 08:16:07王昆張偉
中國錳業 2017年1期
王昆,張偉
(1.西安航空學院電子工程學院,陜西西安710077;2.西安文理學院,陜西西安710065)
基于嵌入式系統的電磁調速采礦機主控系統設計
王昆1,張偉2
(1.西安航空學院電子工程學院,陜西西安710077;2.西安文理學院,陜西西安710065)
伴隨現代工業技術的發展,礦產開采也更加注重高效和安全。目前開采礦產的關鍵設備為采礦機,該設備穩定、可靠、安全。當前國內外主流的采礦機主要是多用電牽引采礦機,依據調速系統的類別主要分為電磁調速、開關磁阻調速和交流變頻調速。電磁調速的牽引系統較后兩者調速系統來講具有技術成熟、體積小、控制系統簡單等優點。以電磁調速的采礦機作為研究對象,從改善電磁調速電動機的控制方法以及提升采礦機信息管理效率的角度出發,進而分析了電磁調速電動機的調速過程,以及建立電磁調速電動機的數學控制模型,最后通過MATLAB的仿真對比來控制算法的穩定性。
嵌入式系統;電磁調速采礦機;主控系統
當前,采礦機牽引類型主要有液壓牽引和電牽引兩種,而電牽引又包括直流電牽引和交流電牽引。在采礦的過程中使用電牽引的采礦機更容易實現自動化的控制,還具有不易污染環境、方便維修、工作的可靠性高、傳動的效率高這些優點[1]。所以,電牽引采礦機成為當前采礦機牽引系統未來的發展趨勢。
1 電牽引采礦機的主控系統國內發展現狀
20世紀90年代,波蘭科馬克與礦科總院上海分院合作研制的MG344-PWD型號的薄礦層交流變頻調速采礦機,這也是國內首次成功研發的交流電牽引式采礦機[2]。隨后在變頻調速的技術上對MG300和AM500液壓式的牽引采礦機進行改造并升級,最終研制出MG300/680-WD型和MG375/ 830-WD型這種交流電牽引采礦機,并且配置全中文界面PLC的控制系統,不僅可以實現電控箱面板和變頻器面板的直接控制,還可以實現功率檢測、溫度檢測、電機熱保護、無線點遙控以及端頭站控制[3]。此外,還有豐富的狀態顯示和控制功能。
2 主控系統結構和研究方案
2.1主控系統結構
伴隨智能化技術快速的發展,對于電機實時性控制以及數據采集都有了更高程度的改善[4]。嵌入電磁調速的采礦機基礎設計為標準通用通信的協議和智能化、集成化的現場裝備,進而滿足電牽引式采礦機控制系統的工業現場需求[5]。本次研究的嵌入式操作系統電磁調速采礦機其主控系統的結構如圖1所示。
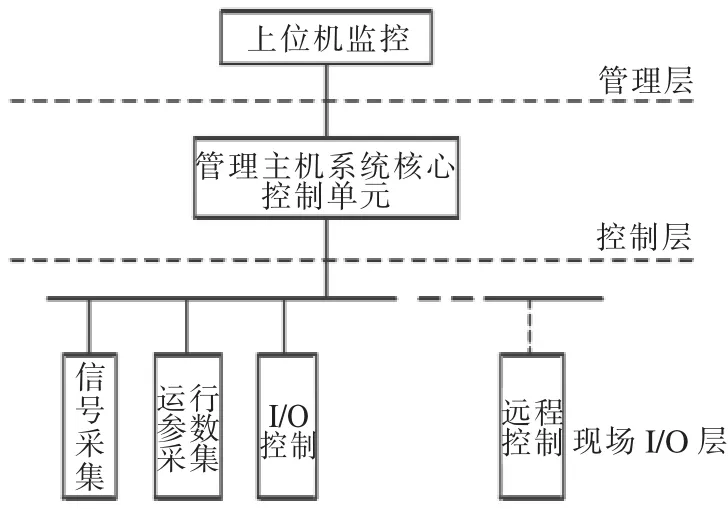
圖1主控系統結構框架
2.2主控系統的工作原理和功能
工作原理:電磁調速采礦機的主控系統主要利用信號轉換電路和機載傳感器來實現信號變化以及傳感器的數據采集,并且主控系統要依據其運動控制的指令來改變IGBT的導通角大小進而調節3項異步電動機的轉速輸出[6]。并且,中控系統還要將采集到的數據施行必要的后續處理、分類以及過濾,最后按照其定制規定再傳輸到管理中心。
功能:主控系統依據變頻調速,結合礦井的工作環境需求,來分析電機調速方法的優點和缺點,進而提高了采礦機的可靠性和操作性。其電磁調速采礦機的主控系統均包含可升級軟件的系統結構、遙測功能、通信管理的功能。
2.3電磁調速采礦機運動控制模型
通過控制指令來控制電動機電樞輸出軸轉動,是電磁調速電動機的控制核心。并且以反饋傳輸到電動機的主控系統來實現轉速傳感器的采集電動機輸出,進而形成了電動機轉速閉環的控制結構,其電磁調速電動機的控制原理圖如圖2所示。
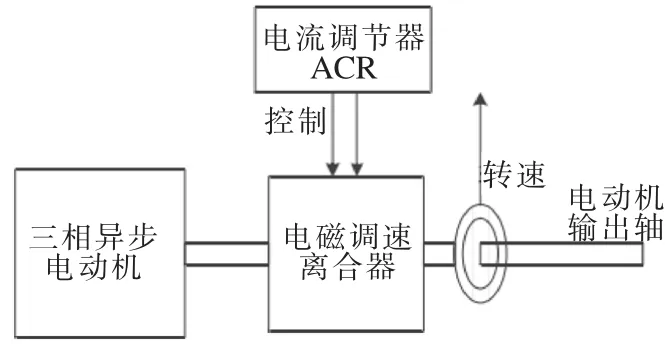
圖2電磁調速電動機控制原理
3 主控系統硬件的研究與實現
3.1主控系統整體硬件功能劃分
主控系統的硬件電路設計使用模塊化的設計思想,主要包含SD卡的數據存儲電路、通信模塊的設計電路、電源模塊的設計電路、數據采集的設計電路、總線型的遙控器模塊、I/O控制、以及CPU核心控制的單元模塊。具體主控系統的結構框圖如圖3所示。

圖3主控系統結構框架
3.2各功能模塊硬件電路研究
首先是CPU核心控制的單元模塊。嵌入式的處理器,也就是CPU的選擇有諸多因素,比如開發的難易程度、使用領域、用戶需求和開發的成本等等。作為主控系統的核心單元,也是整個系統功能和任務的執行者,他的性能指標會直接的影響到控制系統的優劣程度。
其次是總線型遙控器的模塊。即無線遙控副機和無線遙控主機。和傳統數字型采礦機的遙控器相比較,突出的優勢為:協議通用性較強、硬件的接口較為簡單;避免了誤碼率高和傳輸距離短等特點;解決了傳統采礦機遙控器數據單一且傳輸固定的缺陷;遙控主機可以顯示采礦機的實時狀態和運行參數等,方便操作人員實時地對采礦機運行的狀態進行了解,進而實現了采礦機的無線閉環控制。
接著是電源模塊的電路設計。正常運行采礦機的主控系統需要一個穩定安全的電源作為保障,所以在設計電路電源時要以整個主控系統的硬件電路作為基礎。并且在整個主控系統的電路中直流與交流、弱電與強電共存。
最后是SD卡的數據存儲電路設計。數據存儲設備的主控系統使用miniSD卡,并且要以半導體的快速閃存作為技術支持。和CPU之間僅需連線6根即可,此外便不需要額外的電源來保持已經存儲的信息。并且SD卡存儲方便工程技術人員的提取、對采礦機運行時的運行狀態以及各項參數進行分析。而且在主控系統中采用miniSD卡還可有效地節省電路板的空間,具體主控SD卡的電路設計圖如圖5所示。
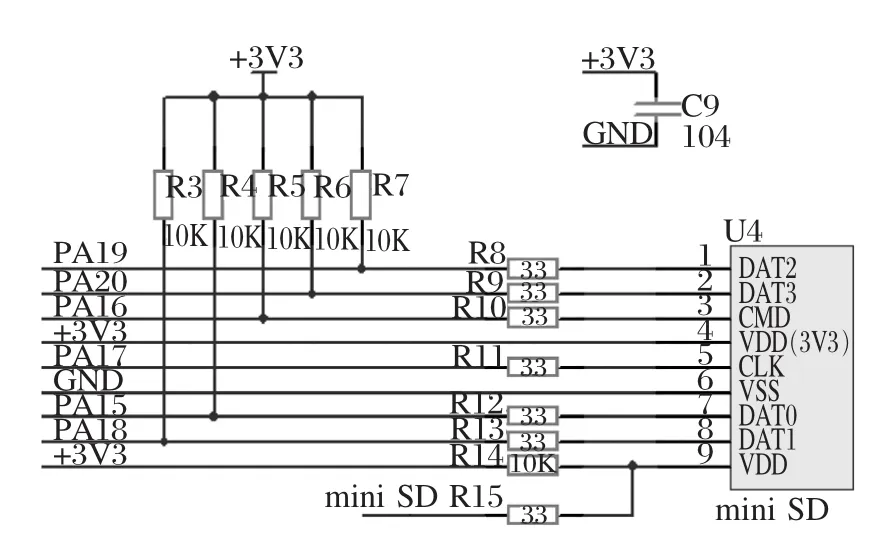
圖5SD卡電路設計
4 主控系統軟件的研究與實現
4.1主控系統程序的設計原則與軟件的組織結構
主控系統的程序設計原則為要使用模塊化的設計思想、具有實時性,并且可靠穩定,具有可測試性。
在設計軟件的時候,要緊密的和嵌入式Linux的系統特點進行聯系,并對于軟件結構進行分層次、分任務、分模塊的設計,其具體軟件系統的結構框圖如圖6所示。
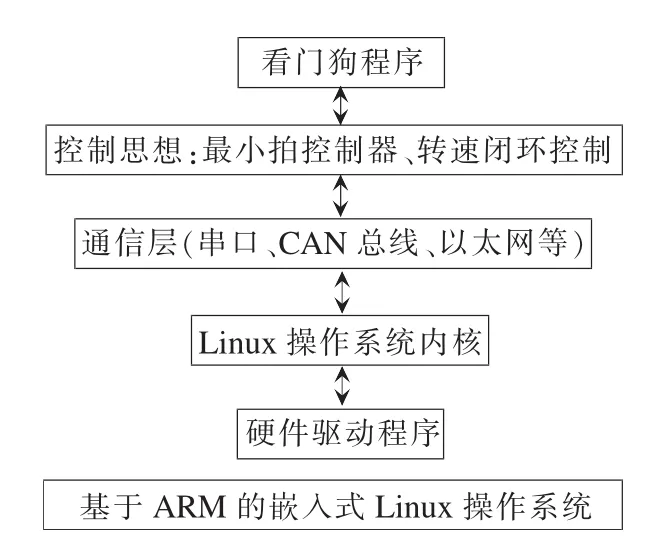
圖6軟件系統結構框
4.2嵌入式Linux系統移致
在實際的運行過程中,采礦機需要管理復雜的程序結構,并且具備實時性、多任務、多線程的處理,所以要在所控制的單元中去移植嵌入式的操作系統。嵌入式的主控系統不僅在實時控制和遠程數據通信方面有很好的優勢,而且也更容易實現系統保護。
4.3最小拍無波紋控制器的研究和實現
電磁調速采礦機的主控系統主要方式為以ARM為核心控制的單元,并且選擇適合的控制方式對電動機的調速性能起到關鍵作用。本文基于最小拍無波紋的控制器的設計過程,通過對閉環PID的調節器里融入最小拍的無波紋控制,使得系統的抗干擾能力增強,而且使得系統具有較強的魯棒性。
5 系統性能仿真與實驗
存在一定的波紋不止會增加設備的機械磨損,并且還會增加控制系統的誤差,所以,必須要設計出最小拍的無波紋控制系統,才能夠有效地滿足于實際工業現場的需求。
本文以電磁調速的電動機作為本次的研究對象,參數為:勵磁電流5 A,電樞回路電阻15 Ω,轉動慣量為0.12 kg/m2,定轉子互感量為2.5 h,晶閘管放大倍數為40,額定轉速為1 360 r/min。并且取采樣的周期為0.1 s,則電磁調速電動機模型經變換后為:

性能測試:在電磁調速采礦機的主控系統投入使用之前要先進行性能測試,通過實際的測試所得到的數據結果見表1。
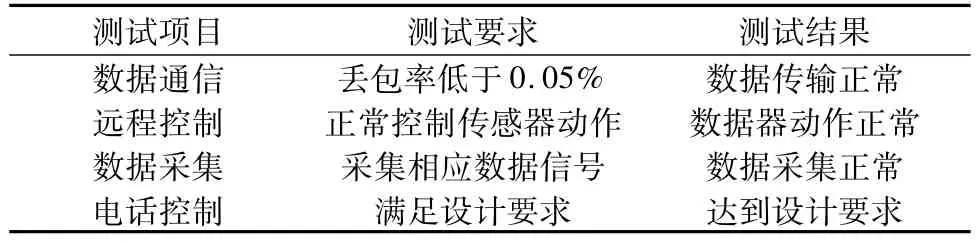
表1 性能測試結果
軟件抗干擾措施主要表現在:增加看門狗功能。主控系統采用嵌入式Linux的操作系統,并且用系統自帶的WatchDog監視系統運行;空指令操作。為確保程序運行能夠正常穩定,通過施行空指令,并且在必要是加入延時,進而確保能夠正常的讀取數據;軟件陷阱。通過某一地址的設定來處理相應的故障程序,當程序跑飛或者由于某種原因而出現問題的時候,將程序指針強行的推向該地址,這樣能夠正確的引導程序運行。
6 結語
本文主要根據電磁調速的采礦機通信管理和電機控制需求,設計并且完成嵌入式的主控系統。并且通過對整體方案需求的分析,進而完成了軟件程序的調試和主控系統硬件的電路設計。其中硬件方面主要包括了設計電路電源、設計SD卡存儲電路、設計通信電路、設計數據采集單元電路、設計總線型的無線遙控器以及設計CPU核心控制的單元電路。軟件方面主要包括了選擇通信協議、設計通信管理程序設計、合理規劃各線程進程、裁剪移植Linux驅動程序、搭建軟件結構。
主控系統可以對電磁調速的牽引電機實現預期的控制效果,而且還具有一定的通信兼容的能力,可以確保系統準確、實時的采集傳感器的數據信號。此外,無線遙控還可以較為準確的去控制命令傳輸到主控系統乃至實現遠程的控制功能,經反復的測試,無線遙控的傳輸在0.05%之內的誤碼率,并且其余各項設計的指標均達標。
[1]張源,張瑤,劉策越,等.嵌入式電磁調速采礦機速度反饋環節的實現[J].科技創新與應用,2014(16):11-13.
[2]劉策越,王偉,趙欣,等.MG561電磁調速采礦機遙控器研究與實現[J].自動化技術與應用,2014,33(3):41-44.[3]何明星,王偉,劉策越,等.電磁調速采礦機閉環控制系統參數辨識研究[J].煤炭科學技術,2016,44(3):100-105.
[4]邱艷海.電磁調速電牽引采礦機遙控改造系統的研究——以MXG-500/4.5H型電磁調速電牽引采煤機為例[J].中小企業管理與科技,2014(18):121-122.
[5]何明星,劉策越,王偉,等.基于Cortex-M3的電磁調速采礦機軟件升級研究[J].煤炭科學技術,2013,41(4):75-81.
[6]齊宏偉,劉永立,馮俊杰,等.新強煤礦急傾斜煤層綜采工作面采礦機穩定性控制研究[J].煤炭技術,2013,32(5):58-60.
Electromagnetic Coupling Mining Machine Control System on Embedded System Design
WANG Kun1,ZHANG,Wei2
(1.Institute of Electronic Engineering,Xi’an Aviation School,Xi’an,Shanxi 710077,China; 2.Liberal Arts College in Xi’an,Xi’an,Shanxi 710065,China)
Along with the development of modern industrial technology,we are paying more attention to efficient and safe mining.At present in mining mineral,it is a key to have equipments mining in stable,reliable,safe process.The current domestic and international mainstream mining machines are mainly electricity traction mining machines.The control system is mainly divided into electromagnetic coupling,including the switch reluctance speed regulation and ac frequency conversion speed regulation.Electromagnetic coupling of traction system is both for speed regulation system,which has mature technology,small volume,and simple control system.We take electromagnetic coupling of the mining machine as the research object to improve the electromagnetic speed motor control method,including the efficiency of the mining machine information management perspective.Then,we made an analysis of the electromagnetic speed in control process to establish the electromagnetic speed motor control model.It is verified by MATLAB simulation to control the stability of the algorithm.
Embedded system;Electromagnetic coupling mining machine;Control system
TD422
B
10.14101/j.cnki.issn.1002-4336.2017.01.051
2016-12-08
王昆(1978-),女,陜西西安人,講師,研究方向:模式識別與智能系統,手機:13309230155,E-mail:150552482@ qq.com;通訊作者:張偉(1976-),女,陜西西安人,副教授,研究方向:電力電子與電力傳動,手機:13379269302,E-mail: 404323582@qq.com.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
藝術啟蒙(2018年7期)2018-08-23 09:14:18
鐵道通信信號(2018年2期)2018-04-18 12:18:23
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
電鍍與環保(2016年3期)2017-01-20 08:15:32
單片機與嵌入式系統應用(2014年9期)2014-03-11 15:35:13
