具有一步時延的直線電機迭代學習控制
2017-06-27 08:14:13周穎,何磊
計算機技術與發展 2017年6期
關鍵詞:系統
周 穎,何 磊
(南京郵電大學 自動化學院,江蘇 南京 210003)
具有一步時延的直線電機迭代學習控制
周 穎,何 磊
(南京郵電大學 自動化學院,江蘇 南京 210003)
將網絡化控制引入傳統的直線電機控制系統,充分發揮網絡化控制的共享信息資源、減少系統布線、增加系統的靈活性和可靠性等優勢,發展一種新型的網絡化直線電機迭代學習控制模式。由于通信網絡的限制,信息在網絡通道中出現傳輸時延在所難免。針對測量信號在網絡通信中存在隨機一步時延的直線電機迭代學習控制系統,分析研究了P型迭代學習控制算法的收斂性問題。在采用Bernoulli隨機序列描述一步時延,并假設其屬于某個給定的數值區間的基礎上,利用壓縮映射方法和λ范數理論給出了P型迭代算法的收斂條件,從理論上證明了算法的收斂性并進行了仿真驗證。理論分析和仿真驗證結果表明,盡管系統存在隨機一步時延,所運用的迭代學習控制算法仍能保證跟蹤誤差的收斂性。
網絡控制;一步時延;直線電機;迭代學習
0 引 言
直線電機是一種將電能直接轉換成直線運動機械能的電力傳動裝置。與旋轉電機相比,直線電機具有更高的轉換效率和定位精度等特性,因此近年來在工業領域應用廣泛。
針對執行重復任務的直線電機,迭代學習控制(Iterative Learning Control,ILC)利用控制系統先前的控制經驗,根據測量系統的實際輸出和期望輸出的偏差,不斷修正不準確的控制信號,向理想的控制信號逼近,以實現有限區間內的完全跟蹤,而且還可以處理系統中由齒槽效應力、摩擦力、波紋推力、端部效應力等因素引起的重復或周期性擾動[1-2]。
對于直線電機迭代學習控制方面的研究已取得了豐富的研究成果[3-9]。文獻[3]針對測量擾動對永磁直線電機迭代學習速度和位置跟蹤控制的影響,提出了一種帶有衰減因子的魯棒迭代算法。在直線電機受齒槽效應力影響和執行器輸入受約束的情況下,文獻[4]設計了一種無模型迭代學習算法以獲得最優系統輸入,加快了系統收斂速度,降低了收斂誤差。直線電機在不同的迭代初始位置下,文獻[5]設計了線性變參數ILC學習律,消除了與位置無關的擾動,獲得了更好的跟蹤性能。文獻[6]將魯棒控制與迭代學習控制結合起來,利用魯棒控制技術實現系統鎮定,克服各種不重復干擾和不確定性的影響。針對直線電機高精度定位控制中存在的推力波動問題,文獻[7]提出了基于在線運行的分段式復合ILC策略,有效降低了電機推力波動,提高了穩態定位精度。文獻[8]考慮到外在干擾因素的不確定性和初態的隨機性,改進了離散時間自適應迭代學習控制方法,提高了直線電機跟蹤性能。文獻[9]設計了一種P型前饋與PID型反饋相結合的迭代學習控制律,加快了收斂速度,提高了跟蹤性能。
網絡控制系統(Networked Control Systems,NCS)是隨控制技術、網絡技術和計算機技術的發展而形成的一種新興控制系統[10]。通信網絡由于存在通信協議、時鐘非精確同步和網絡擁堵等問題,時延的產生不可避免。文獻[11]通過實驗測試,分析了網絡負載、傳送數據包以及傳輸協議選取的不同都會對網絡時延產生不同的影響。文獻[12]在研究室內定位技術上,提出一種基于接收信號強度指示的簡化顯式時延估計(SETDE)算法,根據接收信號強度,更新SETDE算法初始時延估計值。文獻[13]利用馬爾可夫鏈描述隨機時延,研究了具有隨機時不變通信時延的多智能體系統的一致性問題。文獻[14]針對一類具有控制時滯不確定的線性時不變系統,采用改進的PD型迭代學習控制算法補償網絡時滯。
已有文獻針對ILC的網絡控制系統中時延的討論,取得了豐富的研究成果。但在時延的發生概率處理上,一般是將其描述成概率已知的Bernoulli過程[15-16],具有一定的局限性,并且將網絡控制技術具體應用到直線電機系統工程中的相關研究較少。為此,將網絡控制技術應用于直線電機迭代學習控制系統,假設傳感器到控制器的網絡鏈路中存在隨機一步時延,并且將一步時延描述為概率未知的隨機Bernoulli過程,但假設其丟失概率屬于某個已知數值區間。利用壓縮映射方法和λ范數理論推導出所提算法的收斂性充分條件。通過數值仿真驗證該算法的有效性。
1 系統建模
永磁直線電機的非線性模型為:
(1)
其中,ffriction(t)為摩擦力;fripple(t)為推力脈沖;u(t)為推力;m為質量;x(t)為位置;v(t)為速度;t為連續時間。
摩擦力的模型為:
ffriction(t)=[fc+(fs-fc)e-(v/vs)2]sign(v)+Bvv
(2)
其中,fs為靜態摩擦力;fc為庫倫摩擦力的最小值;vs為實驗測得的潤滑參數;Bv為粘滯摩擦參數。
根據電機結構中的齒槽效益,磁阻產生的脈沖力模型為:
fripple(t)=Arsin(ω0x)
(3)
其中,Ar為振幅;ω0為角速度。
針對式(1)~(3)所示的永磁直線電機模型,可以寫成具有如下形式的非線性離散系統。
(4)
其中,k為系統迭代次數;t∈[0,N]為離散時刻;xk(t)為系統狀態變量,對應式(1)中的位置和速度;uk(t)為控制輸入變量,對應式(1)中的推力;yk(t)為控制輸出變量;C為已知常數;f(·),B(·)為非線性函數。
對于非線性系統(4),一種簡單有效的ILC方法為:
uk+1(t)=uk(t)+Lek(t+1)
(5)
其中,uk+1(t)和uk(t)分別為第k+1次和第k次迭代系統的控制信號,也就是當前迭代周期和前一次迭代周期的控制信號;ek(t+1)=yd(t+1)-yk(t+1)為第k次迭代周期第t+1時刻的輸出誤差,yk(t)為測量輸出,yd(t)為期望輸出;L為學習增益因子。
考慮網絡環境下直線電機迭代學習控制系統的結構圖如圖1所示。
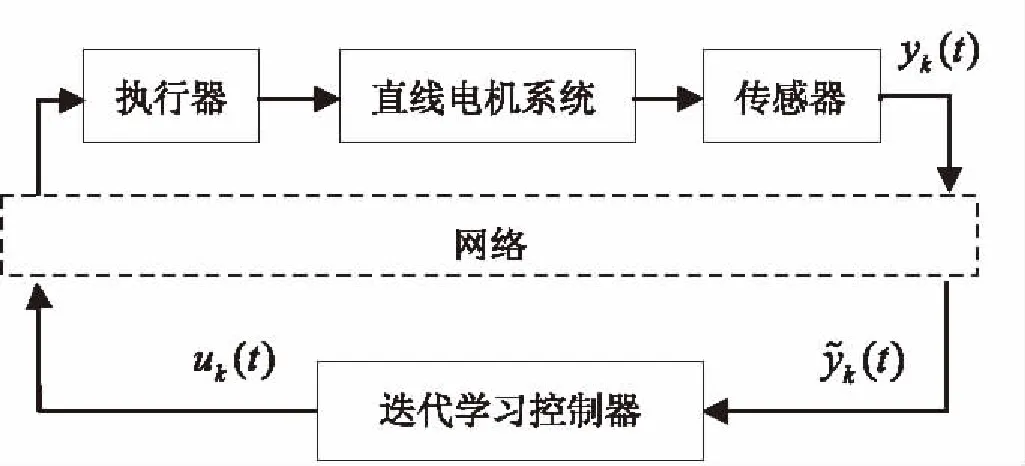
圖1 網絡環境下直線電機迭代學習控制結構圖
對于圖1所示系統,假設測量輸出yk(t)在傳感器到控制器網絡通信中發生了一步時延,則控制器接收到的測量信號可表示為:
(6)
測量信號的隨機一步時延通過γ(t)∈R來描述,其取值為0和1。當γ(t)=1時,表示未發生時延,系統輸出為yk(t);當γ(t)=0時,表示發生了時延,則采用上一個時刻的輸出yk(t-1)。假設它滿足Bernoulli序列分布,γ(t)的概率為:
(7)

(8)
其中,γmin和γmax分別表示一步時延概率的最小值和最大值。
γmax和γmin是已知的,且0<γmin≤γmax≤1,取
(9)

(10)
注:以往在一步時延迭代學習控制研究中對時延的概率一般都是以具體數值表示的,但在實際工程中,一步時延概率并不是固定不變的,可以認為是時變的或者用式(8)數值區間的形式來表示,這樣更能體現對于問題考慮的全面性。這種方法也可以應用到數據丟失系統的研究中。
綜上所述,具有測量信號隨機一步時延的直線電機迭代學習控制系統可表示為:
(11)
(12)

針對系統(11),給出如下假設:
假設1:非線性函數f(·),B(·)滿足Lipschitz條件,即對于所有t∈[0,N],存在有界常數kf、kb滿足:
(13)
其中,x1(t)、x2(t)為任意兩個狀態變量。
假設2:系統的初始條件滿足xk(0)=xd(0),xk(0)為迭代初態,xd(0)為期望初態。
假設3:對于給定的期望輸出yd(t),存在控制輸入ud(t)和狀態xd(t)滿足:
(14)

2 收斂性分析
引理1:?a>1,?λ>1,?i∈+,則式(15)成立。
(15)
證明:
證畢。
(16)
證明:
設k1∈{k-1,k-2,…,k-N}為序列號,滿足:
ak1=max{ak-1,ak-2,…,ak-N}
那么根據引理2中的假設,有:
ak≤ρ1ak-1+ρ2ak-2+…+ρNak-N+ε≤ρak1+ε
類似的,設k2∈{k-1,k-2,…,k-N}為序列號,滿足:
ak2=max{ak-1,ak-2,…,ak-N}
那么,ak1≤ρak2+ε,所以有ak≤ρ2ak2+ρε+ε。
更具一般性的,有:

(17)
這意味著
證畢。
主要結果通過如下定理給出。
定理1:假設將迭代學習律(12)應用于系統(11),并且滿足假設1~3,如果存在ρ,滿足不等式:
(18)

證明:
記Δuk(t)=ud(t)-uk(t),Δxk(t)=xd(t)-xk(t),則有:
(19)
其中,δ(t)=yd(t+1)-yd(t)。
Δxk(t+1)=xd(t+1)-xk(t+1)= f(xd(t))-f(xk(t))+ B(xd(t))ud(t)-B(xk(t))uk(t)= f(xd(t))-f(xk(t))+ B(xk(t))Δuk(t)+ (B(xd(t))-B(xk(t)))ud(t)
(20)

(21)
根據假設1,由式(21)可得:


(22)
根據假設1,利用Lipschitz條件,式(20)可得:

(23)



(24)
將式(24)帶入式(22),可得:

(25)
式(25)兩端取期望,得:
(26)

上式兩端取‖·‖2范數,可得:
k4‖δ(t)‖2
(27)
其中,a≥k1。
為了處理式(27)中的指數at算子,引入λ-范數。式(27)兩邊同時乘以指數函數a-λt,并且同時在時間域[0,N]內取極大值,可得:

(28)

由引理1可知:
(29)
由于0<ρ<1,選取足夠大的λ,滿足如下關系:
(30)
可將式(29)改寫為:
(31)
根據引理2,上式意味著:
(32)

3 實驗結果
對于永磁直線電機系統模型

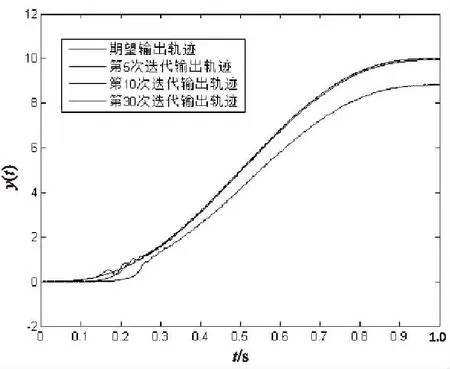
圖時不同迭代次數下的系統輸出軌跡
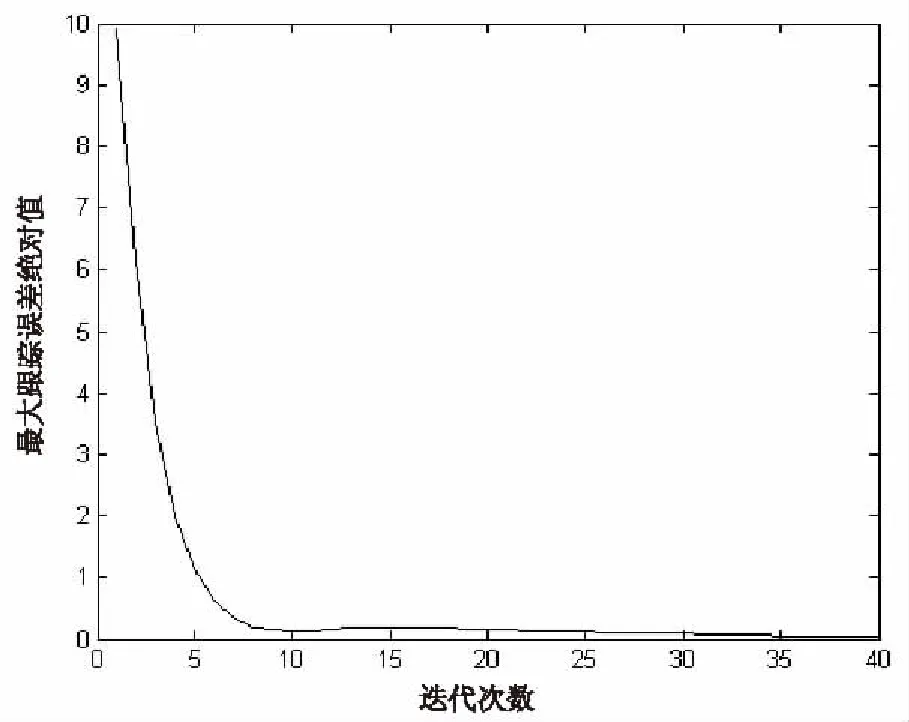
圖∈[0.8,1]時最大跟蹤誤差


圖時不同迭代次數下的系統輸出軌跡

圖時最大跟蹤誤差
從圖2~5可知,盡管系統存在測量數據一步時延的情況,但是其最大跟蹤誤差依舊能夠收斂到一個較小的界內。系統經過一定次數的迭代后趨于穩定。
4 結束語
針對一類測量數據存在隨機一步時延的直線電機迭代學習控制系統,在分析研究了P型迭代學習控制算法收斂性問題的基礎上,給出了算法的收斂條件,理論證明了算法的收斂性并進行了仿真驗證。理論分析和仿真結果表明,當系統存在一步時延時,所提的P型迭代學習控制算法仍然可以保證跟蹤誤差的收斂性。
[1] Tan K K,Dou H F,Chen Y Q,et al.High precision linear motor control via relay-tuning and iterative learning based on zero-phase filtering[J].IEEE Transactions on Control Systems Technology,2001,9(2):244-253.
[2] Lee T H,Tan K K,Lim S Y,et al.Iterative learning control of permanent magnet linear motor with relay automatic tuning[J].Mechatronics,2000,10(1-2):169-190.
[3] 張宏偉,余發山,卜旭輝,等.基于魯棒迭代學習的永磁直線電機控制[J].電機與控制學報,2012,16(6):81-86.
[4] Janssens P, Pipeleers G, Swevers J. Mode-free iterative learning control for LTI systems and experimental validation on a linear motor test setup[C]//American control conference.[s.l.]:[s.n.],2011:4287-4292.
[5] Butcher M,Karimi A.Linear parameter-varying iterative le-arning control with application to a linear motor system[J].IEEE/ASME Transactions on Mechatronics,2010,15(3):412-420.
[6] 樊立萍,劉 義.直線電機的H∞迭代學習控制設計[J].電力系統及其自動化學報,2009,21(2):87-91.
[7] 楊俊友,馬 航,關麗榮,等.永磁直線電機二維分段復合迭代學習控制[J].中國電機工程學報,2010,30(30):74-80.
[8] Jin Shangtai, Hou Zhongsheng,Chi Ronghu.Discrete-time adaptive iterative learning control for permanent magnet linear motor[C]//IEEE international conference on cybernetics and intelligent systems.[s.l.]:IEEE,2011:69-74.
[9] Jia Heshuai,Cao Rongmin,Zhou Huixing.Research on the iterative learning control method for linear motor[C]//International conference on electrical machines and systems.[s.l.]:[s.n.],2011:1-5.
[10] 趙維佺,袁華強,李 迪,等.一類物聯網控制系統中的時延問題研究[J].計算機科學,2014,41(s1):303-305.
[11] 桂 芳,全書海.網絡控制系統傳輸時延分析與測試[J].計算機應用,2005,25(10):2264-2266.
[12] 王 鵬,張曉彤,徐麗媛,等.基于自適應時延估計的室內近場測距算法[J].計算機學報,2016,39(32):1-19.
[13] 高慶文,樊春霞,韋慶陽.具有隨機時延的多智能體系統的一致性研究[J].計算機技術與發展,2013,23(10):52-55.
[14] 張嚴心,徐健洲.不確定時滯系統的PD型迭代學習控制算法[J].北京交通大學學報,2012,36(2):70-73.
[15] Liu Chunping,Xu Jianxin,Wu Jun.Iterative learning control for remote control systems with communication delay and data dropout[J].Mathematical Problems in Engineering,2012(3):705474.
[16] 黃立勛,方 勇.測控信號隨機時延對迭代學習控制系統的影響[J].應用科學學報,2014,32(2):156-162.
Iterative Learning Control for Linear Motor System with One-step Delay
ZHOU Ying,HE Lei
(College of Automation,Nanjing University of Posts and Telecommunications,Nanjing 210003,China)
The networked control is introduced to the linear motor control system to develop a new type of iterative learning control for networked linear motor system,which has many advantages such as resource sharing,less wiring,better flexibility and reliability.Due to the constraint of the communication network,the transmission delay is inevitable.Considering the measurement signal having one-step delay,the convergence problem of P-type Iterative Learning Control (ILC) algorithm has been analyzed for linear motor system.The one-step delay is described as a stochastic Bernoulli process with unknown probability under the hypothesis that the process belongs to a known numerical interval.On this basis,both of the contraction mapping theorem andλnorm theory have been used to derive the convergence condition of the P-type algorithm.The convergence of the algorithm has been proved by theory and simulation.Although the system has one-step delay,the results show that the tracking error can still be converged by using the P-type iterative learning control algorithm.
network control;one-step delay;linear motor;iterative learning
2016-07-05
2016-10-20 網絡出版時間:2017-04-28
國家自然科學基金資助項目(61104103,61102155)
周 穎(1978-),女,博士,副教授,研究方向為網絡化系統的分析與控制;何 磊(1991-),男,碩士研究生,研究方向為網絡化系統的分析與控制。
http://kns.cnki.net/kcms/detail/61.1450.TP.20170428.1703.046.html
TP273
A
1673-629X(2017)06-0060-06
10.3969/j.issn.1673-629X.2017.06.013
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32