基于線掃描的管路三維重建技術研究與實現
2017-06-22 14:25:04范生宏魯利剛
無線電工程 2017年7期
張 杰,李 潘,范生宏,王 順,魯利剛
(1.北京衛星制造廠,北京 100094;2.北京普達迪泰科技有限公司,北京 100083)
基于線掃描的管路三維重建技術研究與實現
張 杰1,李 潘2,范生宏2,王 順2,魯利剛1
(1.北京衛星制造廠,北京 100094;2.北京普達迪泰科技有限公司,北京 100083)
針對航空發動機管路裝配過程中,裝配質量難以保證、檢測效率低的問題,提出一種基于線結構光的管路三維重建測量方法。該方法通過線結構光掃描技術,獲取管路表面三維輪廓數據,利用三維點云數據提取管路脊線和半徑值。針對離散的脊線坐標值,采取NURBS算法對其擬合,利用管路脊線和半徑值重建管路三維模型。通過線結構光掃描測量系統,獲取管路輪廓點云數據,重構管路三維模型。實驗結果證明,該方法和測量系統可以實現管路三維的快速重建,重建數據可用于管路間隙測量。
線結構光;亞像素;三維測量;管路重建
0 引言
航空發動機的管路系統[1]主要是指連接發動機各個部件、附件以及與飛機相連的管路,包括導管及連接件、密封件和卡箍等,用于液壓、燃油和氧氣等介質的輸送。一臺典型航空發動機上的導管多達100~250根,其形狀、尺寸各異,由于布局空間限制嚴格,導管層疊交錯,空間形態復雜。在航空發動機的裝配過程中,管路的敷設、導管的固定、卡箍的安裝都需要遵循相應的規則,其裝配質量直接關系到成品的質量、可靠性和工作壽命。若出現漏檢情況,會導致試車過程中出現導管碰撞損毀或介質泄露的情況。因此,為了提高裝配質量和可靠性,提出一種管路數字化檢測方法,實現對管路系統的外形輪廓及位置度的準確測量,減少裝配誤差,提高裝配質量。
針對航空發動機管路系統檢測方法[2]可分為接觸式檢測和非接觸式檢測。非接觸式檢測[3]目前比較成熟的是光學測量方法,在滿足檢測精度要求下,檢測效率和自動化程度都有所提高。基于線激光的測量方法,采用結構光測量技術[4],擁有大量程、大視場、高精度以及控制簡單的優勢,可擴展應用于管路系統的三維測量。針對管狀點云數據的三維重建處理,文獻[5-7]已展開多項研究,西北工業大學的劉元朋博士[8]通過提取管路的截面特征和曲面特征,利用專家系統對其進行識別和規范化處理,最后利用提取的管路參數信息進行實體模型重建。上海大學的孫亮等人[9]提出一種基于迭代的切片方法優化算法,根據管線方向變化自動尋找對應切片,獲取管道截面輪廓線及中心線,進而重構出模型。Ulrich Bauer[10]針對單視圖采集的管路點云,利用移動最小二乘法計算脊線,然后根據一種啟發式的空間圓弧曲線逼近擬合算法,重構管道曲面。本文基于上述思想,提出了通過構建線結構光測量系統來實現三維信息獲取,利用傳動裝置實現被測管路與光切面的相對平移運動,獲取管路表面單視圖三維輪廓數據,根據管路自身特性,采取擬合方法提取管路中心線和半徑值,最終實現管路三維重建。
1 線掃描管路三維重建系統
1.1 系統框架
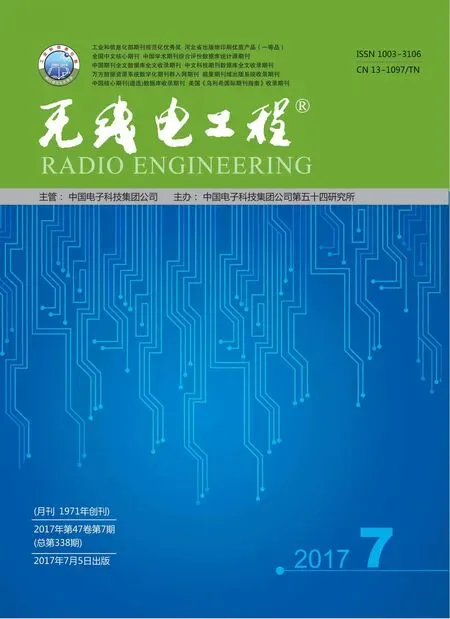
線掃描管路三維重建系統框架如圖1所示。
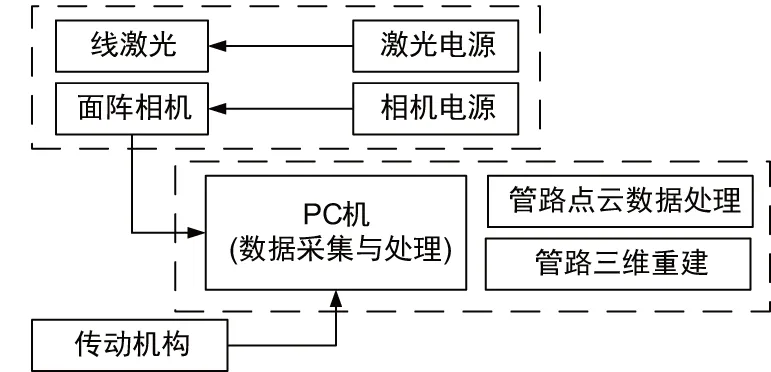
圖1 線掃描管路三維重建系統框架
基于線掃描的管路三維重建系統由3部分組成:線結構光三維測量模塊、傳動機構模塊和管路三維重建軟件。三維測量模塊是通過已標定相對位置關系的相機和線激光,獲取管路三維切片數據;傳動機構模塊,通過驅動激光切片和管路相對平移運動,獲取管路單視角三維輪廓數據[11];管路三維重建軟件,通過對管路點云數據處理,提取管路脊線和半徑特征,實現管路模型的三維重構。
1.2 測量流程
線掃描管路三維測量示意圖如圖2所示的,激光光源發出的線結構光投射到物體表面上,并在相機像面上成像。根據相機成像面上激光線的形變狀態,利用標定出的相機內參數和相對位置關系參數,得到物體表面一幀的點云數據。通過單軸運動機構驅動傳感器對物體表面進行掃描,從而獲得被測物體表面的點云數據。
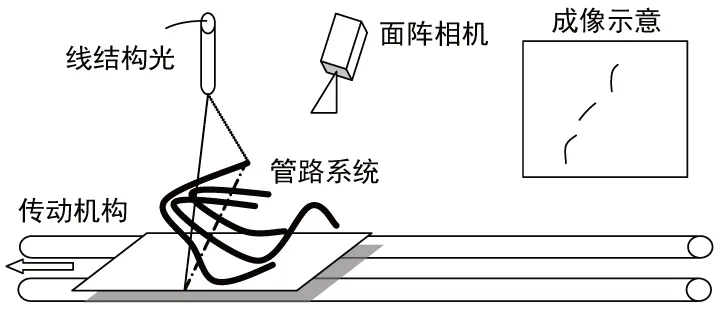
圖2 線掃描管路三維測量示意
2 線結構光三維掃描技術
2.1 線結構光測量模型
結構光測量模型如圖3所示,利用激光發射線光束,光平面與物體相交就會在物體表面形成一條輪廓光帶,利用相機采集輪廓光帶圖像[12]。此時,相機、光帶和光束發生器形成一個三角對應關系,通過計算模型即可得到被測物體光帶輪廓的三維坐標。
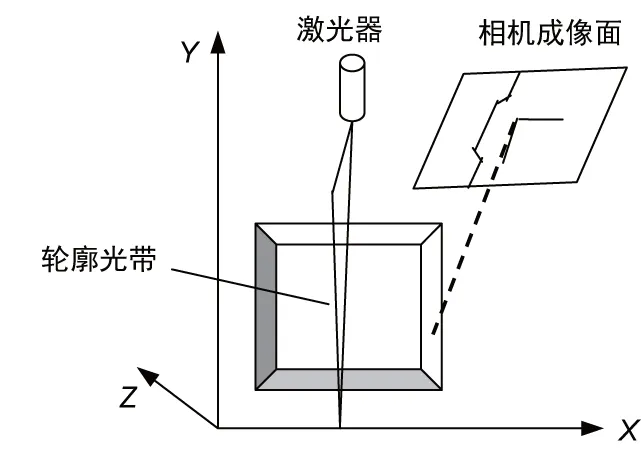
圖3 結構光測量模型
2.2 結構光數學模型與鏡頭畸變校正
結構光映射模型如圖4所示,其描述是結構光光平面與攝像機平面之間的映射關系。通過增加線結構光平面的約束方程,則可以獲取攝像機二維圖像點坐標唯一對應的三維實物點坐標[13]。
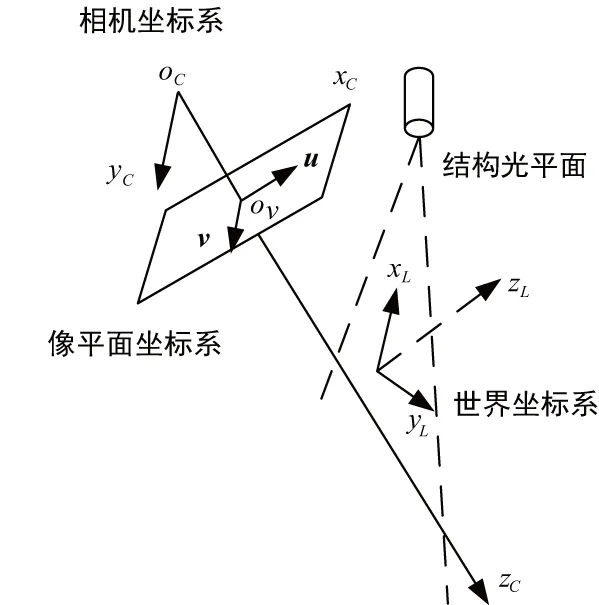
圖4 結構光映射模型
映射關系和約束方程為:
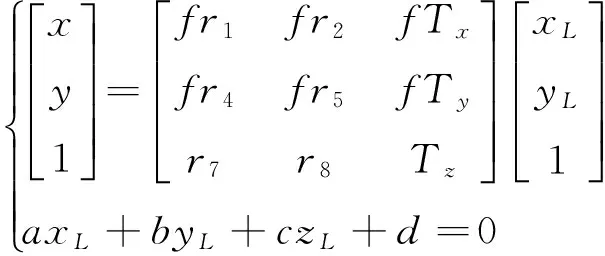
式中,f、r、T等參數組成由相機內參、外參共同決定的投影矩陣;a,b,c,d組成線結構光平面方程。由于理想的成像模型是不存在的,在實際應用中還需要考慮鏡頭畸變問題,其畸變模型可用下列公式所描述。
系統畸變:
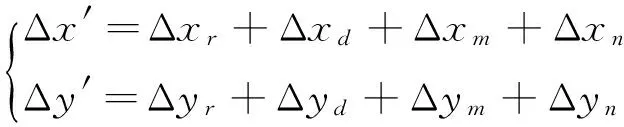
徑向畸變:

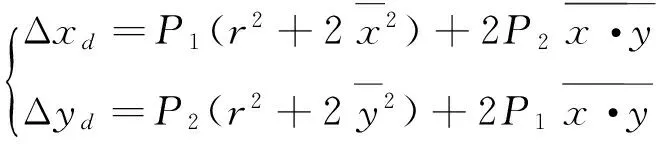
偏心畸變:
像平面畸變:
內方位元素畸變:
2.3 條紋亞像素中心線坐標提取
相機獲取的結構光條紋圖像是具有一定寬度,存在噪聲干擾的光帶。針對光帶條紋中心提取方法有多種[14],如中心法、極值法、重心法和擬合法等。本文通過分析結構光帶圖像特點:噪聲干擾、灰度不對稱非正態分布和散斑效應等。采取先利用低通平滑濾波算法進行預處理,降低噪聲和散斑影響,設If(i,j)為低通濾波后的圖像數據,濾波系數分別為k0=0.370 286,k1=0.271 843,k2=0.095 016。
If(i,j)=k0×I(i,j)+k1×[I(i,j-1)+I(i,j+1)]+
k2×[I(i,j-2)+If(i,j+2)]。
再利用梯度中心法提取條紋中心亞像素坐標。提取結果如圖5和圖6所示。
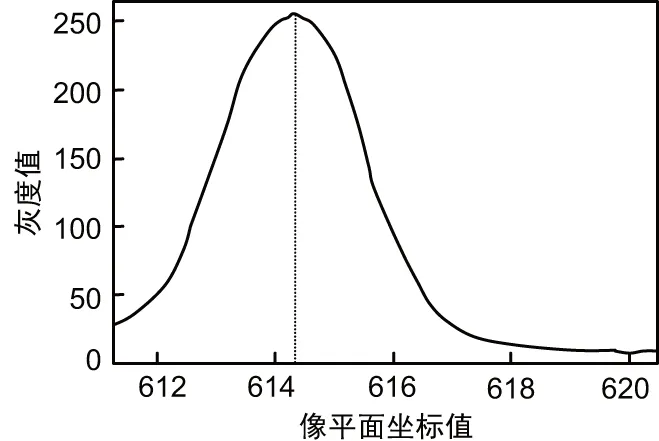
圖5 結構光條紋灰度圖分布
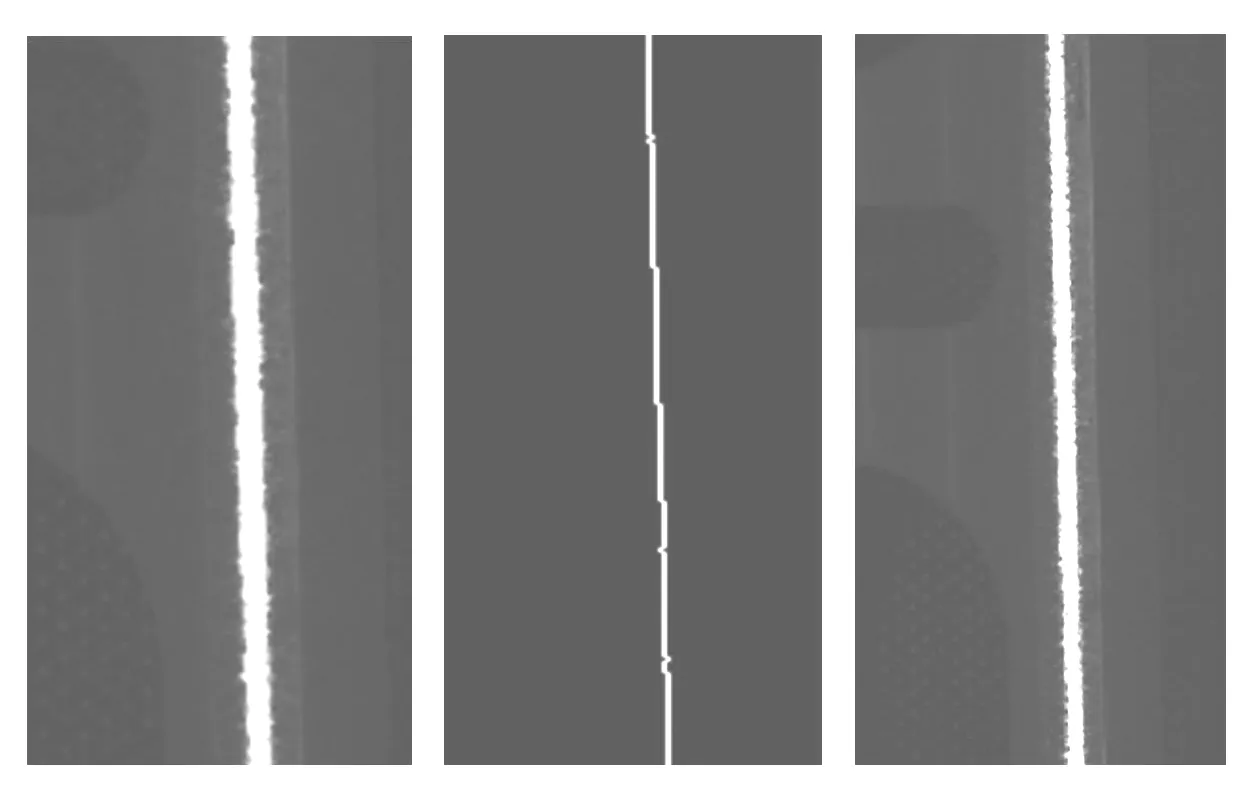
圖6 條紋亞像素中心線提取
2.4 管路三維點云數據獲取
搭建完線掃描模塊和標定出傳動機構運動方向后[15],即可用于物體表面輪廓三維數據獲取。物體沿掃描運動方向的點云坐標由運動參數與掃描間隔決定,掃描運動的間隔大小,直接影響點云坐標值。本文所設計的結構光掃描系統的圖像采集裝置由運動控制系統的觸發控制。系統運行時,通過IO控制卡輸出觸發信號,驅動傳統機構前進,同時觸發相機采集圖像,獲取穩定可靠的管路三維點云數據,如圖7所示。
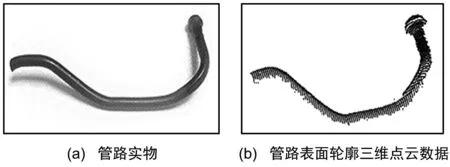
圖7 管路表面輪廓點云數據獲取
3 管路點云數據處理重構
針對管路表面輪廓點云數據,根據管路自身幾何特性等先驗知識[16],采用數據分割方法將點云分割成多個基元模塊,利用擬合方法提取管路中心軸線坐標和半徑值,對離散中心軸坐標點擬合曲線,利用脊線和半徑值實現管路三維重建[17]。
3.1 點云數據分割
在管路點云數據處理過程中,管路半徑值是一個關鍵參數。本文采取先提取管路半徑值,再利用半徑值對數據進行分塊的方法[18]。管路半徑值計算步驟如下:
① 首先對管路點云數據進行聚類分塊,對分塊點云數據投影到XY平面;
② 在XY平面通過擬合方法提取數據方向特征;
③ 對符合直線特征的點云塊,按空間圓柱面擬合方法計算半徑值。最后利用提取的管路半徑值參數,采取最小包圍盒法對管路進行分塊。
空間圓柱面數學表達式為:
r2= (x-a)2+(y-b)2+(z-c)2-
式中,(a,b,c)為圓柱面中心軸一點;(d,e,f)為圓柱面中心軸方向向量;(x,y,z)為擬合圓柱面點云上一點,擬合圓柱面半徑為r。利用點云擬合求解圓柱面參數步驟:先利用泰勒展開式將表達式線性化,整體平差,然后利用點云塊每個數據點到圓柱面距離平方和最小的條件,利用最小二乘方法,求取圓柱面參數,局部圓柱面擬合如圖8所示。

圖8 局部圓柱面擬合
3.2 管路中心軸線提取
對每個點云數據塊,利用其微分性質,擬合一個密切拋物曲面,將點云數據投影到曲面的中心軸線上,得到中心軸線上若干散亂點。具體步驟[19]如下:
① 以包圍盒中心點作為參考點;
② 根據長方體點云密度計算適當鄰域值;
③ 根據鄰域點集擬合密切拋物曲面;
④ 將參考點投影到目標曲面上得到標記點,計算標記點在曲面上的微分性質;
⑤ 最后將標記點沿法向量方向移動到中心軸上,位移距離為最大主曲率的倒數。最終得到管路中心軸線上目標點。
當點集Pi中所有點到密切拋物曲面的距離和最短,則為所求密切拋物曲面,求和公式如下:

式中,OX為標記點;‖Pi-Ox‖為領域點集中點Pi到標記點距離;θ為加權函數;ui,vi,hi表示點集P在以{OX:u(n),v(n),n}坐標系下的參數化點。對求和公式進行優化求解,即可得到拋物曲面參數表示。管路中心軸線提取如圖9所示。
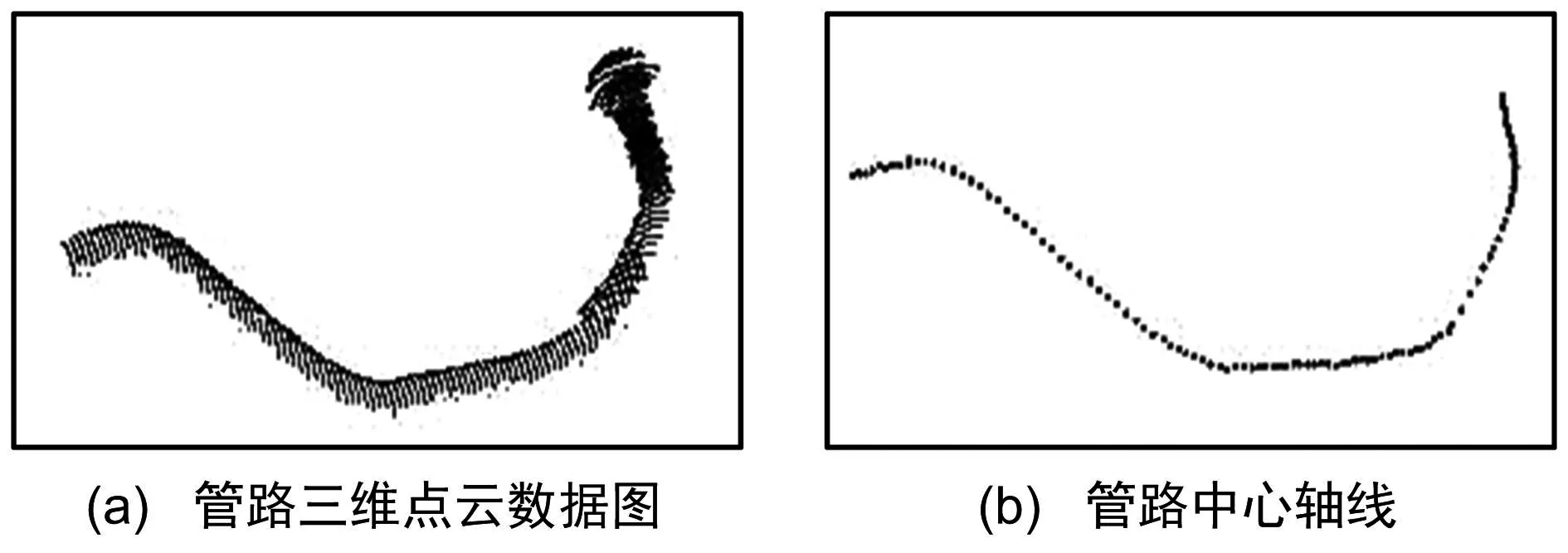
圖9 管路中心軸線提取
3.3 脊線擬合與管路重構
提取的中心軸坐標點列是存在噪聲的散亂點列,在對其進行曲線擬合之前,需要進行平滑濾波處理。本文針對散亂點列中存在的突起異常值,通過計算相鄰點之間角度和梯度,對超出設定閾值的點剔除處理,然后采取擬合方法提取管路脊線。
NURBS曲線擬合方法通過權因子和非均勻節點矢量能夠對曲線的形狀進行有效控制,不僅可以擬合標準二次曲線,也適用于自由曲線[20]。本文利用NURBS對平滑濾波后的中心軸點列進行擬合獲得管路脊線。利用獲取的管路半徑值和管路脊線,導入三維重建軟件,最終得到管路三維重建模型,如圖10所示。
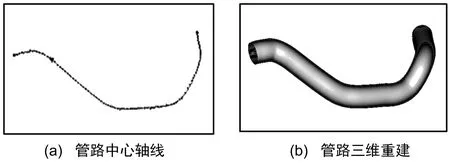
圖10 管路中心軸擬合與三維重建
4 管路三維重建實驗驗證
本文利用上述方法,對模擬的管路系統進行三維重構實驗驗證,驗證步驟如下:
① 利用線結構光掃描系統和傳動機構,獲取單視角下的管路表面三維點云數據。點云數據如圖11(a)所示。
② 通過對點云數據進行分塊,利用局部拋物面擬合方法,提取管路半徑值和中心軸坐標點列,對離散點列進行曲線擬合,獲取管路脊線數據。管路脊線如圖11(b)所示。
③ 利用管路半徑值和管路脊線,實現管路三維重建。重建結果如圖11(c)所示。
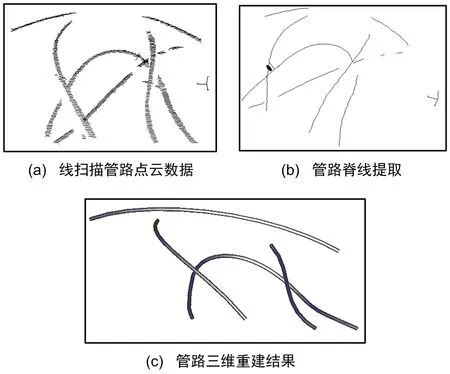
圖11 三維重構實驗結果
利用重建的管路三維模型,通過計算所得管路半徑值、管路最小間隙值與實際值進行比較,誤差小于0.1 mm。結果表面,利用線結構光測量系統重建的管路數據與實物有很好一致性,該方法滿足現場管路重建和間隙測量需求。
5 結束語
本文將線掃描三維測量技術運用到管路系統的裝配質量檢測,通過三維線掃描測量系統和水平傳動機構獲取管路表面三維輪廓數據。針對管路點云數據,利用數據分割和局部拋物面擬合方法提取管路中心軸坐標點列和管路半徑值,然后通過點列平滑和NURBS曲線擬合算法提取管路脊線,最終實現了管路三維重建。實驗結果證明了該方法滿足現場管路系統裝配質量檢測要求。
[1] 樊江.航空發動機外部管路多代理協同設計系統研究[D].北京:北京航空航天大學,2003.
[2] 劉檢華,劉少麗,寧汝新,等.管路數字化布局設計與制造及檢測集成技術[J].計算機集成制造系統,2015,21(4):941-954.
[3] 馬驪群,曹鐵澤,王繼虎,等.便攜式坐標測量系統在航空發動機關鍵部件檢測中的應用[J].計測技術,2008,28(6):9-12.
[4] 宋大虎,李忠科,程春霞.基于線結構光的三維坐標測量技術研究[J].計算機工程,2012,38(22):291-292.
[5] 趙玉芹.基于多幅標定圖像的管件三維重建[D].南京航空航天大學,2008.
[6] 張天,唐承統,劉檢華.基于多目視覺的彎管空間參數測量方法[J].儀器儀表學報,2013,34(2):260-267.
[7] 牛平月,鄭聯語,楊啟龍.基于雙目視覺的管路快速檢測技術研究與實現[J].航空精密制造技術,2014(2):16-19.
[8] 劉元朋,陳良驥,馮憲章,等.基于特征的航空發動機管路反求建模方法研究[J].機床與液壓,2008(5):22-25.
[9] 孫亮,趙翠蓮,施曉磊,等.基于切片法的管道重構算法及其應用[J].機械設計與研究,2010,26(4):15-18.
[10] BAUER U,POLTHIER K.Generating Parametric Models of Tubes from Laser Scans[J].Computer-Aided Design,2009,41(10):719-729.
[11] 張劍清,鄭莉.基于結構光的不規則工業鈑金件三維曲面重建[J].地理空間信息,2004,2(6):9-10.
[12] 范生宏,劉昌儒,亓曉彤,等.結構光三維測量系統精度分析及驗證[J].光電工程,2014(5):52-56.
[13] 張維光,趙宏,張琦,等.線結構光三維輪廓測量系統的標定方法[J].中國激光,2009,36(1):182-188.
[14] 吳家勇,王平江,陳吉紅,等.基于梯度重心法的線結構光中心亞像素提取方法[J].中國圖象圖形學報,2009,14(7):1354-1360.
[15] 陳新禹,馬孜,陳天飛,等.線結構光視覺測量系統運動軸線的簡易標定方法[J].中國激光,2012,39(11):168-173.[16] 劉元朋.基于特征的航空發動機管路反求建模系統關鍵技術研究[D].西安:西北工業大學,2006.
[17] 馬符訊,那地曼-艾尼瓦爾,林歡.散亂點云數據的分割方法探究[J].測繪與空間地理信息,2014(10):148-151.
[18] 劉元朋,陳良驥,李明,等.航空發動機管路測量數據分割方法[J].航空學報,2008,29(2):285-291.
[19] 劉煥彬.點云管道曲面重構[D].杭州:杭州電子科技大學,2011.
[20] 韓明,孔亞洲,董煬斌,等.圓弧曲線的二次NURBS表示方法研究[J].華中科技大學學報(自然科學版),2001,29(12):37-39.
Research and Application of 3D Reconstruction Techniques of Pipeline Based on Line Scanning
ZHANG Jie1,LI Pan2,FAN Sheng-hong2,WANG Shun2,LU Li-gang1
(1.BeijingSpacecrafts,Beijing100194,China;2.BeijingProdetecTechnologyCo.,Ltd,Beijing100083,China)
This paper proposes a method of Pipeline 3D reconstruction based on line structured light in view of low detection efficiency and the assembly quality not guaranteed in the process of pipeline assembly.The method can be used to obtain the 3D profile data of the pipeline surfaces based on line structured light scanning technique,and extract the ridge line and the radius of the pipeline by using the 3D point cloud data.According to the discrete ridge coordinates,the NURBS algorithm is adopted to fit it,and the 3D model is reconstructed by using the line ridge and radius.The structured light scanning system is used to obtain point cloud data of Pipeline contour and reconstruct pipeline 3D model.The experimental results show that the proposed method and the measuring system can realize the rapid reconstruction of three-dimensional reconstruction of the pipeline,and the reconstruction data can be used to measure the gap.
line structured light;sub-pixel;3D measurement;pipe reconstruction
10.3969/j.issn.1003-3106.2017.07.16
張杰,李潘,范生宏,等.基于線掃描的管路三維重建技術研究與實現[J].無線電工程,2017,47(7):66-70.[ZHANG Jie,LI Pan,FAN Shenghong,et al.Research and Application of 3D Reconstruction Techniques of Pipeline Based on Line Scanning[J].Radio Engineering,2017,47(7):66-70.]
2017-03-27
國防基礎科研計劃基金資助項目。
TP391
A
1003-3106(2017)07-0066-05
張 杰 男,( 1979—) ,高級工程師。主要研究方向:精密測量技術的應用與研究。
李 潘 男,( 1988—) ,碩士研究生。主要研究方向:機器視覺和圖像處理。
猜你喜歡
中等數學(2022年2期)2022-06-05 07:10:50
哲學評論(2021年2期)2021-08-22 01:53:34
小學生學習指導(低年級)(2020年6期)2020-07-25 02:31:36
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中華詩詞(2019年7期)2019-11-25 01:43:04
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
小學生學習指導(低年級)(2018年9期)2018-09-26 05:59:44
瘋狂英語·新讀寫(2018年2期)2018-09-07 09:32:10
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
影視與戲劇評論(2016年0期)2016-11-23 05:26:01