軸流葉片非接觸式模態(tài)特性測(cè)試系統(tǒng)的開(kāi)發(fā)與研究
2017-06-21 07:44:18寧寶奇李朝峰楊樹(shù)華孟繼綱李凱華
航空發(fā)動(dòng)機(jī) 2017年6期
寧寶奇 ,李朝峰 ,楊樹(shù)華 ,孟繼綱 ,李凱華
(1.東北大學(xué)機(jī)械工程與自動(dòng)化學(xué)院,沈陽(yáng)110819;2.大連理工大學(xué)能源與動(dòng)力學(xué)院,大連116024;3.沈陽(yáng)鼓風(fēng)機(jī)集團(tuán)股份有限公司,沈陽(yáng)110819)
0 引言
軸流葉片是旋轉(zhuǎn)壓氣做功類(lèi)設(shè)備的核心零部件,其模態(tài)特性分析一直是研究人員所關(guān)注的重點(diǎn)[1-2],而葉片數(shù)值模型仿真結(jié)果的準(zhǔn)確性離不開(kāi)測(cè)試實(shí)驗(yàn)的佐證。在工程應(yīng)用中,研究人員采用各種模態(tài)測(cè)試方法測(cè)試結(jié)構(gòu)的振動(dòng)模態(tài)來(lái)驗(yàn)證結(jié)構(gòu)設(shè)計(jì)的正確性[3-6]。以往的葉片模態(tài)測(cè)試大多采用錘擊的方法進(jìn)行,其振動(dòng)信號(hào)的衰減特性會(huì)導(dǎo)致高頻處的測(cè)試不準(zhǔn)確甚至無(wú)法測(cè)到。隨著葉片結(jié)構(gòu)輕量化和動(dòng)力性能需求的提升,結(jié)構(gòu)的中高頻動(dòng)響應(yīng)越來(lái)越突出。如果能在結(jié)構(gòu)設(shè)計(jì)階段對(duì)動(dòng)態(tài)響應(yīng)進(jìn)行預(yù)示,并根據(jù)預(yù)示結(jié)果進(jìn)行結(jié)構(gòu)優(yōu)化,則能夠從本質(zhì)上解決高周疲勞的問(wèn)題,因此對(duì)葉片在高頻激勵(lì)下的響應(yīng)測(cè)試變得越來(lái)越重要。對(duì)于軸流轉(zhuǎn)子葉片的模態(tài)測(cè)試,目前國(guó)內(nèi)外普遍采用的是錘擊法。該方法自20世紀(jì)80年代就已經(jīng)成為頻域法測(cè)試葉片動(dòng)態(tài)特性的主要途徑[7-8]。與錘擊法相比,時(shí)域共振法理論上可以真實(shí)地反映出結(jié)構(gòu)在不同激振頻率下的響應(yīng),由于該方法的測(cè)試頻率范圍寬,可識(shí)別的模態(tài)信息豐富,因此具有十分明顯的優(yōu)越性。當(dāng)前的虛擬儀器技術(shù)的發(fā)展使得實(shí)現(xiàn)持續(xù)掃頻及非接觸激勵(lì)的控制變?yōu)榭赡堋R虼溯S流葉片的時(shí)域共振測(cè)試具備一定的工程和理論意義。
針對(duì)模態(tài)識(shí)別方法問(wèn)題,有很多學(xué)者作了大量工作。邊杰[9]提出了1種利用相頻曲線在共振點(diǎn)的切線斜率求解模態(tài)阻尼比的新方法,即切線斜率法,由共振點(diǎn)處的切線斜率來(lái)確定模態(tài)阻尼比。Tarinejad等人[10]提出了基于FDD-wavelet方法的結(jié)構(gòu)模態(tài)識(shí)別新算法,并指出了該算法在多種動(dòng)態(tài)系統(tǒng)中的適用性和準(zhǔn)確性。李暉等人[11-12]在明確阻尼辨識(shí)原理的基礎(chǔ)上,對(duì)經(jīng)典的半功率帶寬阻尼識(shí)別方法進(jìn)行了改進(jìn),提出了1種在頻域上識(shí)別阻尼參數(shù)的新方法。劉紅石[13]比較分析了幾種確定Rayleigh阻尼比例系數(shù)的方法,并從相對(duì)誤差理論的角度應(yīng)用最小二乘法導(dǎo)出了Rayleigh阻尼比例系數(shù)的計(jì)算公式。而針對(duì)測(cè)試軟件的開(kāi)發(fā),虛擬儀器由于具有開(kāi)發(fā)靈活和成本低等優(yōu)點(diǎn)而被廣泛采用。Ladipo等人[14]通過(guò)LabVIEW程序監(jiān)測(cè)多自由度系統(tǒng)的振動(dòng)幅度,主動(dòng)調(diào)節(jié)減振器,對(duì)振動(dòng)形成了有效的控制。Shah等人[15]提出了用Lab-VIEW系統(tǒng)化的方式在實(shí)時(shí)系統(tǒng)中測(cè)量振動(dòng)信號(hào),監(jiān)測(cè)和預(yù)先判斷旋轉(zhuǎn)機(jī)械出現(xiàn)的故障。因此,基于LabVIEW開(kāi)發(fā)測(cè)試軟件是1個(gè)很好的選擇。
為了拓寬被測(cè)試對(duì)象的有效測(cè)試頻率范圍,并提高其測(cè)試的準(zhǔn)確性,本文基于時(shí)域共振法進(jìn)行了軸流葉片模態(tài)特性測(cè)試系統(tǒng)的開(kāi)發(fā),實(shí)現(xiàn)了葉片的各階固有頻率及相應(yīng)振型及模態(tài)阻尼比的測(cè)試,并給出了比例阻尼系數(shù)的估計(jì)值。在企業(yè)級(jí)實(shí)驗(yàn)工作中獲得了良好的應(yīng)用效果,為該類(lèi)測(cè)試系統(tǒng)的開(kāi)發(fā)與測(cè)試工作提供參考。
1 動(dòng)力參數(shù)測(cè)試原理及數(shù)據(jù)處理辦法
1.1 不同幅值表示下固有頻率與共振頻率的關(guān)系
葉片結(jié)構(gòu)一般為多自由度系統(tǒng),按照模態(tài)理論解耦后可變成若干單自由度系統(tǒng)。因而,這里以單自由度系統(tǒng)為例,推導(dǎo)激振力作用下葉片的響應(yīng)。
固有頻率是振動(dòng)系統(tǒng)的重要特性參數(shù)。設(shè)激振力F0cosωt作用在有阻尼單自由度系統(tǒng)上,系統(tǒng)振動(dòng)位移穩(wěn)態(tài)解幅值可表示為
式中:k為剛度;m為振動(dòng)質(zhì)量;c為振動(dòng)阻尼。將阻尼參變量n=c/2m,阻尼比ζ=n/ωn,無(wú)阻尼固有頻率ωn=代入式(1),位移幅值可改寫(xiě)為
B在其極值時(shí)取得最大值。極值條件為
速度幅值為
同樣可得到極值條件為
加速度幅值為
在2ζ2<<1時(shí),可近似得到極值條件為
由式(3)、(5)和(7)可以看出,振動(dòng)的位移、速度、加速度的幅值各自到達(dá)極大值的共振頻率各不相同。當(dāng) ζ=0 時(shí),由式(3)、(5)和(7)分別計(jì)算得到的固有頻率都相等且等于系統(tǒng)的無(wú)阻尼自由振動(dòng)頻率,即固有頻率;在弱阻尼條件下,3種共振頻率都接近于系統(tǒng)的固有頻率,但只有速度共振頻率真正與固有頻率相等。因此在本測(cè)試系統(tǒng)中采用非接觸式激光速度測(cè)振儀進(jìn)行信號(hào)的采集。
1.2 頻域帶寬法測(cè)試阻尼的原理
阻尼是反映結(jié)構(gòu)系統(tǒng)振動(dòng)過(guò)程中能量耗散特征的參數(shù)。對(duì)于振動(dòng)系統(tǒng)的穩(wěn)態(tài)解幅值式(1),代入無(wú)阻尼頻率 ωn、阻尼比 ζ、頻率比 r、靜力 F0下的形變 δst,對(duì)式(1)作替換可得
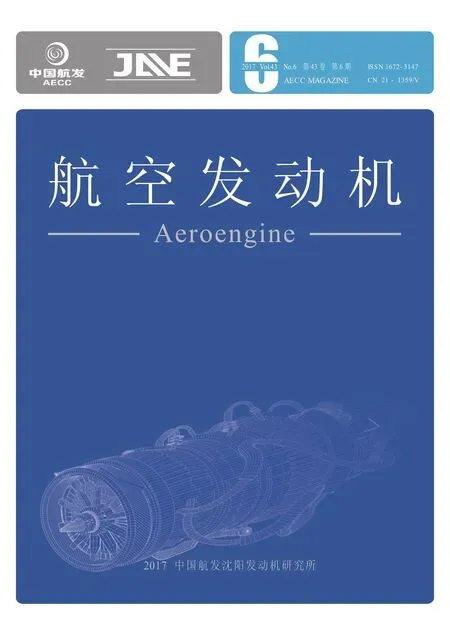
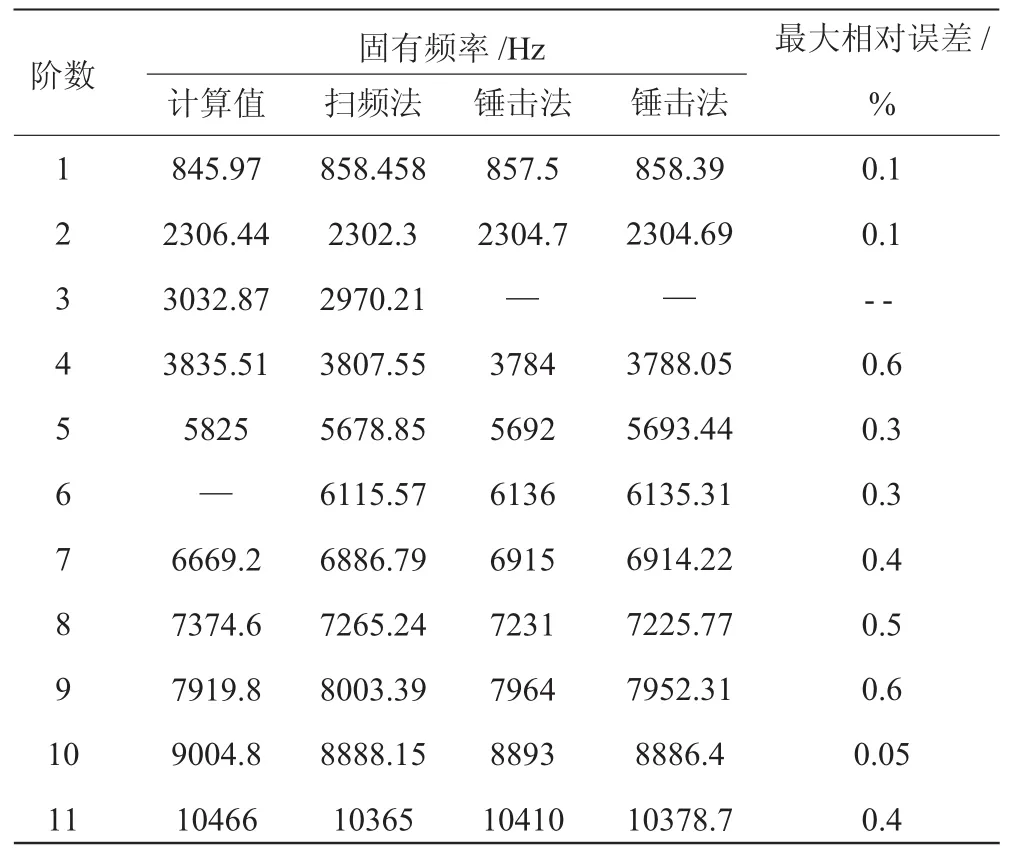
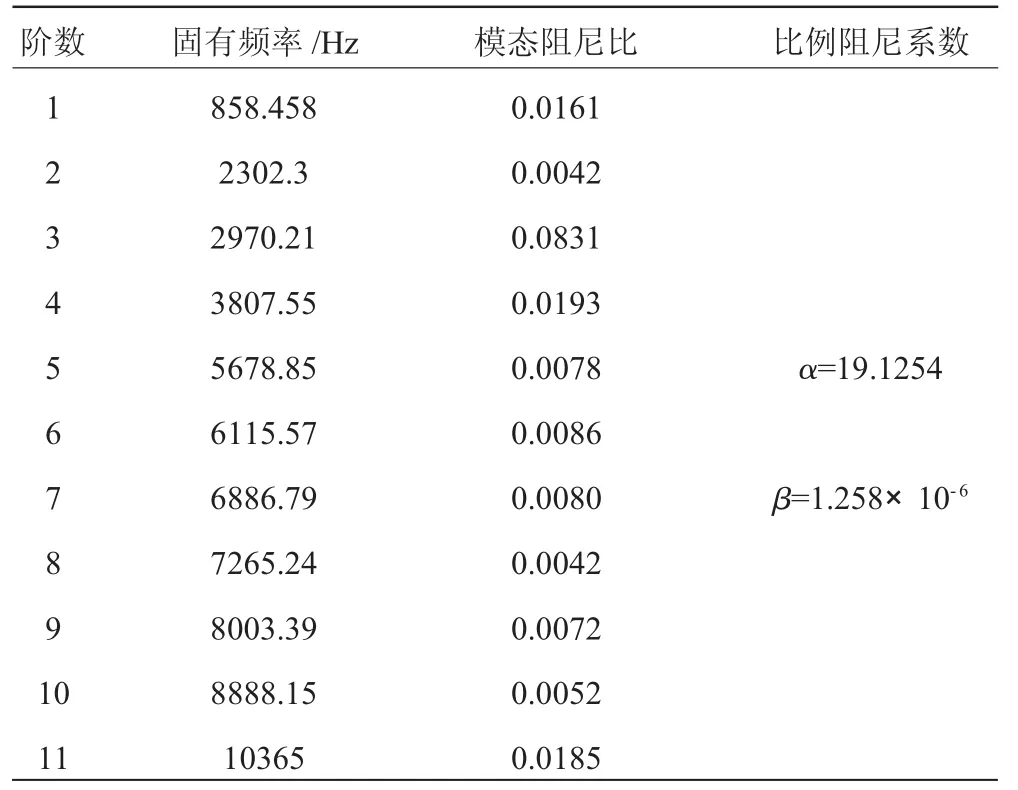
對(duì)于小阻尼系統(tǒng)時(shí),振幅放大系數(shù)(B/δst)取得最大值
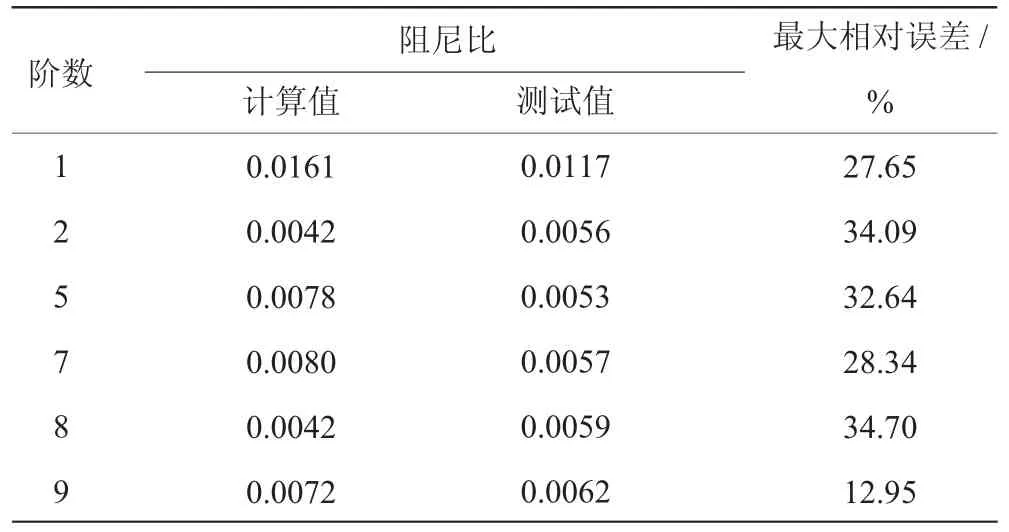
在固有頻率ωn左右取2個(gè)頻率點(diǎn)ω1、ω2,且2點(diǎn)振幅放大系數(shù)相等,令 B/δst=p(B/δst)max(0 對(duì)于較小的 ζ值(ζ<0.05),式(10)的解可近似為 2個(gè)解的平方相減,利用近似關(guān)系ω1+ω2=2ωn進(jìn)一步化簡(jiǎn),則式(11)可變?yōu)?/p> 當(dāng)比例值為半功率點(diǎn),則式(12)變?yōu)?/p> 式(13)即為常用的半功率帶寬法標(biāo)準(zhǔn)的辨識(shí)公式。 通常,結(jié)構(gòu)阻尼矩陣C不能像質(zhì)量矩陣M和剛度矩陣K那樣可由單元體的阻尼矩陣形成,而采用C=αM+βK形式的粘性阻尼矩陣。這種阻尼稱(chēng)為Rayleigh阻尼,其阻尼矩陣稱(chēng)為比例阻尼矩陣。其中α、β為Rayleigh阻尼比例系數(shù),C、M、K分別為阻尼矩陣、質(zhì)量矩陣和剛度矩陣。 使用無(wú)阻尼系統(tǒng)的正則模態(tài)矩陣u對(duì)阻尼矩陣C對(duì)角化,即可得到 其中ζi為各階模態(tài)阻尼比,ωi為各階固有頻率。 由最小二乘法可令 將式(15)分別對(duì)α、β求導(dǎo),且令其偏導(dǎo)為0,化簡(jiǎn)可獲得阻尼系數(shù)α、β分別為 由此得到各階模態(tài)阻尼比與比例阻尼系數(shù)α、β之間的關(guān)系。因此,對(duì)結(jié)構(gòu)進(jìn)行動(dòng)響應(yīng)分析時(shí),就可將按式(16)、式(17)求得的α、β作為最后動(dòng)力響應(yīng)計(jì)算的比例阻尼系數(shù)。 按照時(shí)域共振法的原理以及測(cè)試準(zhǔn)確性的需求,需要對(duì)非接觸式電磁激振器進(jìn)行激振信號(hào)的輸出控制,對(duì)非接觸式激光拾振傳感器進(jìn)行拾振信號(hào)采集記錄,對(duì)測(cè)得信號(hào)的數(shù)據(jù)進(jìn)行提純處理,模態(tài)特征提取,以及最終報(bào)告的生成。因此需將開(kāi)發(fā)測(cè)試系統(tǒng)分為4個(gè)獨(dú)立的模塊,即參數(shù)配置模塊、信號(hào)采集與濾波模塊、模態(tài)數(shù)據(jù)提取模塊和試驗(yàn)報(bào)告生成模塊。模塊化程序流程如圖1所示。 根據(jù)軟件總體架構(gòu)中各個(gè)功能模塊間的相互關(guān)系,調(diào)用各個(gè)模塊功能。測(cè)試系統(tǒng)采用單點(diǎn)激勵(lì)多點(diǎn)采集的方式,自定義設(shè)置掃頻時(shí)間、掃頻頻率范圍和激振力幅值,以線性正弦掃描掃頻的方式激勵(lì)葉片,同時(shí)采集均布在葉片上的各采樣點(diǎn)的掃頻頻響曲線。將所有采樣點(diǎn)處的振動(dòng)響應(yīng)信號(hào)進(jìn)行實(shí)時(shí)處理。提取出響應(yīng)信號(hào)中的混頻信息,再在混頻信息中提取出所關(guān)心的頻率成分的單頻信息(包括頻率和幅值),生成頻域響應(yīng)曲線。所有采樣點(diǎn)處的頻域響應(yīng)曲線組成模態(tài)分析圖,依據(jù)模態(tài)識(shí)別原理,由程序自動(dòng)在模態(tài)分析圖中查找計(jì)算葉片的模態(tài)特性,其中包括各階固有頻率、振型、模態(tài)阻尼比和比例阻尼系數(shù)。最后在軟件界面中顯示識(shí)別出的模態(tài)特性,將結(jié)果數(shù)據(jù)保存在計(jì)算機(jī)硬盤(pán)中并生成測(cè)試報(bào)告。 在軟件總體架構(gòu)和基本操作流程確定后,還需要設(shè)計(jì)友好的軟件界面,使人機(jī)之間的信息交流直觀清晰,軟件操作簡(jiǎn)單方便,邏輯清晰合理,提高工作效率。模態(tài)參量測(cè)試系統(tǒng)的部分工作界面如圖2所示,其中圖(a)為參數(shù)配置界面,圖(b)為振動(dòng)信號(hào)采集界面,圖(c)為測(cè)試結(jié)果回放界面,圖(d)為報(bào)表生成界面。每個(gè)功能模塊都有與之對(duì)應(yīng)的操作界面,工程人員可以通過(guò)改變界面上的輸入量(如數(shù)據(jù)采集卡的采樣率、采樣數(shù)及掃頻信息等)來(lái)調(diào)控測(cè)試系統(tǒng)完成相應(yīng)的功能操作,同時(shí)軟件分析計(jì)算出的測(cè)試結(jié)果也可以通過(guò)圖形、圖表、數(shù)字等形式直觀地顯示在軟件界面中,達(dá)到模態(tài)特性測(cè)試的目的。 在激振器和拾振器工作的過(guò)程中,由于電子元件電流噪聲的干擾,測(cè)得信號(hào)的頻率成分往往十分復(fù)雜,尤其在高頻和低頻激勵(lì)位置干擾更為明顯,因此需要對(duì)信號(hào)進(jìn)行濾波提純處理。這里對(duì)常用的巴特沃斯(Butterworth)、切比雪夫(Chbyshev)、貝塞爾(Bessel)、橢圓4種IIR數(shù)字濾波器進(jìn)行測(cè)試,它們?cè)谕◣ьl帶內(nèi)外都有平穩(wěn)的幅頻特性。為獲得較好的濾波效果,對(duì)50Hz激振頻率下的信號(hào)進(jìn)行帶通濾波,以選擇合適的濾波器,4種濾波器對(duì)50Hz激振頻率下的信號(hào)進(jìn)行帶通濾波的效果對(duì)比(如圖3所示)。其中圖(a)、(b)為濾波前信號(hào)的時(shí)域及頻譜,圖(c)、(d)為4種濾波器濾波后信號(hào)的頻率及幅值對(duì)比,圖(e)、(f)為濾波器濾波后信號(hào)的時(shí)域。 從圖(c)中可見(jiàn),4種濾波器都能有效地濾掉雜頻成分。但是從圖(d)中可見(jiàn)Bessel濾波器濾波后信號(hào)的幅值較另外三者大,對(duì)信號(hào)的能量削弱較小,且圖(e)所示的Bessel濾波器濾波后信號(hào)的整體幅頻特性最好,圖(f)的橢圓濾波器最差。因此Bessel濾波器是這4種濾波器中最好的選擇。從圖(e)、(f)中可見(jiàn),濾波器有較長(zhǎng)的過(guò)渡帶,在過(guò)渡帶上造成了信號(hào)失真,但過(guò)渡帶之后的幅頻特性非常好,因此在數(shù)據(jù)處理時(shí)需截取濾波后信號(hào)的后半部分進(jìn)行后續(xù)分析,以消除失真對(duì)信號(hào)的影響。 根據(jù)既定的測(cè)試原理搭建的測(cè)試平臺(tái),如圖4所示。為實(shí)現(xiàn)激勵(lì)的非接觸要求,根據(jù)需要從相關(guān)激振器廠家中選擇國(guó)內(nèi)某廠家定制了非接觸式電磁激振器,并采用了某型數(shù)字采集卡。振動(dòng)速度采集傳感器為數(shù)字非接觸式激光測(cè)振儀,該型傳感器可避免因在葉片上粘貼傳感器給葉片增加附加質(zhì)量而帶來(lái)的測(cè)量誤差。該測(cè)振儀的速度分辨率為0.05μm/s(1Hz帶寬),可以滿足測(cè)試系統(tǒng)對(duì)速度信號(hào)精度識(shí)別的要求。根據(jù)Nyquist采樣定理:如果在信號(hào)中不丟失任何信息,則采樣頻率必須大于信號(hào)中最高頻率的2倍。在實(shí)驗(yàn)中需要分析的最大頻率為11000 Hz,則所需的最小采樣頻率為11000 Hz×2.56=28200 Hz。實(shí)驗(yàn)中選取的采樣頻率為96000 Hz,遠(yuǎn)大于所需的最小采樣率,可以滿足Nyquist采樣定理。 根據(jù)前面測(cè)試平臺(tái)的搭建計(jì)劃,選定實(shí)驗(yàn)對(duì)象為圖5(a)所示的某型號(hào)軸流壓縮機(jī)8級(jí)葉片,展長(zhǎng)為63 mm,弦長(zhǎng)為50 mm,翼厚比為8.7%~13.5%。搭建的實(shí)驗(yàn)現(xiàn)場(chǎng)如圖5(b)所示。 掃描激勵(lì)從理論上講是1種瞬態(tài)激勵(lì)的方法,掃描速度不合適將在一定程度上影響測(cè)量的準(zhǔn)確性,因此需要對(duì)掃描速度進(jìn)行選擇。為了測(cè)得葉片各階模態(tài)振型,這里在葉片上規(guī)劃了5×6個(gè)采樣點(diǎn),并對(duì)采樣點(diǎn)逐個(gè)進(jìn)行掃描掃頻激勵(lì),同時(shí)采集各個(gè)采樣點(diǎn)的響應(yīng)信號(hào),提取響應(yīng)信號(hào)中的頻率成分信息,繪制頻域響應(yīng)曲線,并分析獲得各階固有頻率、振型、模態(tài)阻尼比和比例阻尼系數(shù)等目標(biāo)參數(shù),最終根據(jù)需要輸出實(shí)驗(yàn)報(bào)告。 由于實(shí)驗(yàn)室條件的限制,采用東華和LMS兩種商用測(cè)試系統(tǒng)進(jìn)行錘擊法測(cè)試(實(shí)驗(yàn)現(xiàn)場(chǎng)如圖6所示),并將測(cè)試結(jié)果及理論計(jì)算值與所述的測(cè)試系統(tǒng)得到的固有頻率測(cè)試結(jié)果以及有限元計(jì)算結(jié)果進(jìn)行對(duì)比驗(yàn)證。經(jīng)過(guò)多次敲擊測(cè)試,將得到的效果最好的幾組頻響數(shù)據(jù)與所述測(cè)試系統(tǒng)得到的模態(tài)分析圖相對(duì)比(如圖7所示)。由錘擊法的頻響圖可以看出,11000 Hz之前有10個(gè)峰值,可以大致找到10階固有頻率,其中一些頻率值識(shí)別比較困難。 從圖7中可見(jiàn),經(jīng)過(guò)2型設(shè)備多次錘擊實(shí)驗(yàn)測(cè)得的頻響曲線、數(shù)值計(jì)算值以及所述的系統(tǒng)所測(cè)試的幅頻曲線反映的頻率值基本一致。但錘擊法測(cè)試出現(xiàn)了漏頻現(xiàn)象,高頻處測(cè)試準(zhǔn)確度和辨識(shí)度降低。這一現(xiàn)象是由于錘擊法自身的缺陷造成的,且錘擊法難以保證每次的敲擊都具有相同的特性。錘擊測(cè)試結(jié)果與本文所述的測(cè)試系統(tǒng)得到的固有頻率測(cè)試結(jié)果以及有限元數(shù)值計(jì)算值的對(duì)比見(jiàn)表1。通過(guò)對(duì)比可以發(fā)現(xiàn):2種方法得到的固有頻率測(cè)試值與理論計(jì)算值基本一致,都處在相同的頻率區(qū)間范圍內(nèi);在2型設(shè)備的錘擊法測(cè)試中,在第3階處都出現(xiàn)了漏頻現(xiàn)象,中高頻處頻響曲線所受干擾較大,準(zhǔn)確識(shí)別固有頻率比較困難;測(cè)試系統(tǒng)得到的測(cè)試結(jié)果無(wú)漏頻現(xiàn)象,且在11000 Hz以?xún)?nèi)的固有頻率都能準(zhǔn)確的識(shí)別出來(lái);本文所開(kāi)發(fā)的測(cè)試系統(tǒng)得到的模態(tài)分析圖包含的模態(tài)信息非常豐富,在高頻處依然可以獲得很好的響應(yīng)特征,很好地克服了錘擊法重復(fù)性差及高頻衰減快的缺點(diǎn)。測(cè)試系統(tǒng)得到的測(cè)試結(jié)果與錘擊法1和錘擊法2的測(cè)試結(jié)果對(duì)比,最大相對(duì)誤差都在0.6%以下,在理論上是由于瞬態(tài)激振和穩(wěn)態(tài)激振2種不同的激勵(lì)形式造成的。因此認(rèn)為所開(kāi)發(fā)的非接觸式模態(tài)測(cè)試系統(tǒng)所測(cè)的結(jié)果是可信的。 表1 固有頻率測(cè)試結(jié)果對(duì)比 通過(guò)上述實(shí)驗(yàn)驗(yàn)證發(fā)現(xiàn):由于受到電磁激振器及采集卡性能的限制,通過(guò)線性掃描掃頻所得到的葉片在50~11000 Hz范圍內(nèi)的幅頻曲線是可信的。圖8為30個(gè)測(cè)點(diǎn)對(duì)應(yīng)的幅頻曲線,從圖中可以找到11個(gè)較為明顯的波峰,峰值處所對(duì)應(yīng)的頻率值即為固有頻率值。測(cè)試系統(tǒng)根據(jù)各階頻率的振動(dòng)幅值繪制出的各階固有頻率下的振型如圖9所示。通過(guò)試驗(yàn)測(cè)得的各階固有頻率值和對(duì)應(yīng)的模態(tài)阻尼比見(jiàn)表2,以及由最小二乘法得到的比例阻尼系數(shù),該比例阻尼系數(shù)值可對(duì)動(dòng)力學(xué)計(jì)算工作提供一定程度上的參考。 表2 葉片模態(tài)特性測(cè)試結(jié)果 為了判定模態(tài)阻尼比以及比例阻尼系數(shù)的準(zhǔn)確性,本文通過(guò)計(jì)算多次測(cè)量結(jié)果最大相對(duì)誤差的方法來(lái)判定本測(cè)試系統(tǒng)測(cè)試模態(tài)阻尼比方法的可重復(fù)性。為了避免因采樣點(diǎn)位置不同而造成的實(shí)驗(yàn)誤差,保證每次都在相同點(diǎn)采樣,每階阻尼比都至少測(cè)量3次,部分測(cè)試結(jié)果對(duì)比見(jiàn)表3。由測(cè)試結(jié)果可以看出,每階阻尼比3次測(cè)量結(jié)果的最大相對(duì)誤差都不大于1%,證明本測(cè)試系統(tǒng)所應(yīng)用的阻尼比測(cè)試方法具有較好的可重復(fù)性和一致性,模態(tài)阻尼比測(cè)試結(jié)果是可信的。根據(jù)測(cè)試得到的各階固有頻率和模態(tài)阻尼比計(jì)算比例阻尼系數(shù)α、β,再通過(guò)α、β及固有頻率值計(jì)算各階阻尼比,將阻尼比測(cè)試值和計(jì)算值進(jìn)行對(duì)比得到相對(duì)誤差。去除部分對(duì)模態(tài)貢獻(xiàn)較小階次的模態(tài)數(shù)據(jù),測(cè)試結(jié)果對(duì)比見(jiàn)表4。由于該結(jié)果通過(guò)最小二乘法獲得,且無(wú)法保證通過(guò)2個(gè)值來(lái)擬合所有階的阻尼情況,該部分的誤差值會(huì)稍大,結(jié)果的相對(duì)誤差都在可接受的范圍內(nèi),因此該測(cè)試系統(tǒng)所應(yīng)用的比例阻尼系數(shù)計(jì)算方法是可靠的。 表3 模態(tài)阻尼比測(cè)試方法可重復(fù)性驗(yàn)證結(jié)果 表4 比例阻尼系數(shù)計(jì)算方法可靠性驗(yàn)證結(jié)果 應(yīng)用NI LabVIEW平臺(tái),基于時(shí)域共振法和非接觸式激勵(lì)測(cè)量技術(shù)開(kāi)發(fā)了針對(duì)軸流葉片中高頻模態(tài)特性的測(cè)量系統(tǒng),并實(shí)現(xiàn)了激振測(cè)振設(shè)備和信號(hào)分析系統(tǒng)的全自動(dòng)驅(qū)動(dòng)分析工作。具體工作包括: (1)推導(dǎo)了辨識(shí)模態(tài)阻尼比及比例阻尼系數(shù)的公式,比較了多種濾波器的濾波效果并選擇合理的濾波器。詳細(xì)說(shuō)明了動(dòng)力參數(shù)的測(cè)試原理及測(cè)試系統(tǒng)的構(gòu)建。 (2)搭建了測(cè)試實(shí)驗(yàn)平臺(tái),對(duì)測(cè)試系統(tǒng)進(jìn)行了實(shí)驗(yàn)驗(yàn)證。結(jié)果表明,本測(cè)試系統(tǒng)的測(cè)試頻率范圍為50~11000 Hz,可以實(shí)現(xiàn)軸流葉片的各階(尤其在中高頻處)固有頻率、振型、模態(tài)阻尼比及比例阻尼系數(shù)的測(cè)試。并且測(cè)試過(guò)程更加自動(dòng)化,測(cè)試的模態(tài)信息更加豐富。 (3)與錘擊法固有頻率測(cè)試結(jié)果及理論計(jì)算結(jié)果進(jìn)行了對(duì)比,所得到的誤差可以接受,證明了該測(cè)試系統(tǒng)具有可信性。測(cè)試避免了漏頻現(xiàn)象,模態(tài)阻尼比和比例阻尼系數(shù)的測(cè)試計(jì)算均在可接受的范圍內(nèi)。研究結(jié)果表明,該測(cè)試系統(tǒng)的測(cè)頻范圍寬,精度高,具有良好的準(zhǔn)確性和可重復(fù)性。 [1]Wang H,Ding JJ,Ma B,et al.The time domain analysis of the flutter of wind turbine blade combined with eigenvalue approach[J].Advanced Materials Research,2013,342-347. [2]Schlagwein G,Schaber U.Non-contact blade vibration measurement analysis using a multi-degree-of-freedom model[J].Journal of Power&Energy,2006,220(6):611-618. [3]Griffith T D,Carne T G,Paquette J A.Modal testing for validation of blade models[J].Wind Engineering,2008,32(2):91-102. [4]Mao H J.Modal testing and numerical simulation of large wind turbine blade[J].Journal of Engineering Thermophysics,2009,30(4):601-604. [5]Ewins D J,Weekes B,Carri A D.Modal testing for model validation of structures with discrete nonlinearities[J].Mathematical Physical&Engineering Sciences,2015,373(2051):1-18. [6]Damgaard M,Ibsen L B,Andersen L V,et al.Cross-wind modal properties of offshore wind turbines identified by full scale testing[J].Journal of Wind Engineering&Industrial Aerodynamics,2013,116(5):94-108. [7]李勛,張東明,趙開(kāi)寧.錘擊法在航空發(fā)動(dòng)機(jī)部件模態(tài)試驗(yàn)中的常見(jiàn)問(wèn)題淺析[J].航空發(fā)動(dòng)機(jī),2010,36(5):47-51.LI Xun,ZHANG Dongming,ZHAO Kaining.Common problems analysis of impact modal test in aeroengine component[J].Aeroengine,2010,36(5):47-51.(in Chinese) [8]Liu J,Gao J L,GuiZhi M U,et al.An improved experimental modal analysis system with hammering method[J].Journal of Vibration&Shock,2009,28(3):174-177. [9]邊杰.共振點(diǎn)切線斜率估計(jì)模態(tài)阻尼的新方法[J].太原理工大學(xué)學(xué)報(bào),2016(5):563-567.BIAN Jie.A novel for estimating modal damping with tangent slope value at resonant point[J].Journal of Taiyuan University of Technology,2016(5):563-567.(in Chinese) [10]Tarinejad R,Damadipour M.Modal identification of structures by a novel approach based on FDD-wavelet method[J].Journal of Sound&Vibration,2014,333(3):1024-1045. [11]李暉,孫偉,張永峰,等.懸臂薄板結(jié)構(gòu)阻尼特性幾種測(cè)試方法的比較[J].中國(guó)工程機(jī)械學(xué)報(bào),2013,11(4):347-353.LI Hui,SUN Wei,ZHANG Yongfeng,et al.Comparative study on texting methods for damping property of cantilever thin-plate structures[J].Chinese Journal of Construction Machinery,2013,11(4):347-353.(in Chinese) [12]李暉,孫偉,徐凱,等.基礎(chǔ)激勵(lì)頻域帶寬法辨識(shí)懸臂薄板結(jié)構(gòu)的阻尼特性[J].中國(guó)機(jī)械工程,2014(16):2173-2177.LI Hui,SUN Wei,XU Kai,et al.Damping characteristics of thin cantilever plate structure identified by frequency bandwidth method of base excitation [J].China Mechanical Engineering,2014(16):2173-2177.(in Chinese) [13]劉紅石.相對(duì)誤差與Rayleigh阻尼比例系數(shù)的確定 [J].湖南工程學(xué)院學(xué)報(bào):自然科學(xué)版,2001,11(3,4):36-38.LIU Hongshi.The determination of relative error and the Rayleigh damping ratio[J].Journal of Hunan Institute of Engineering(Natural Science Edition),2001,11(3,4):36-38.(in Chinese) [14]Ladipo I L,Muthalif A G A.Wideband vibration control in multi degree of freedom system:experimental verification using LabVIEW[J].Procedia Engineering,2012,41:1235-1243. [15]Shah H S,Patel P N,Shah SP,et al.8 channel vibration monitoring and analyzing system using LabVIEW[C]//Nirma University International Conference on Engineering.Piscataway:IEEE Press,2014:1-4.1.3 Rayleigh比例阻尼系數(shù)的求解
2 測(cè)試系統(tǒng)的構(gòu)建
2.1 系統(tǒng)框架及測(cè)試流程
2.2 系統(tǒng)交互界面設(shè)計(jì)
2.3 濾波器的選擇
3 可信性的驗(yàn)證及實(shí)驗(yàn)結(jié)果
3.1 測(cè)試平臺(tái)的搭建
3.2 測(cè)試可信性的驗(yàn)證
3.3 測(cè)試系統(tǒng)的實(shí)驗(yàn)測(cè)試結(jié)果
4 結(jié)論
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
湖北經(jīng)濟(jì)學(xué)院學(xué)報(bào)·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機(jī)學(xué)院學(xué)報(bào)(2015年4期)2015-02-28 14:30:00