跟蹤微分器在陀螺信號去噪方面的應用
2017-06-07 08:24:31李賢濤晉超瓊
中國光學 2017年3期
關鍵詞:信號
朱 楓,張 葆,李賢濤,晉超瓊,申 帥
(1.中國科學院 長春光學精密機械與物理研究所,吉林 長春 130033;2.中國科學院大學,北京 100049)
跟蹤微分器在陀螺信號去噪方面的應用
朱 楓1,2,張 葆1*,李賢濤1,晉超瓊1,2,申 帥1,2
(1.中國科學院 長春光學精密機械與物理研究所,吉林 長春 130033;2.中國科學院大學,北京 100049)
為了提高航空光電穩定平臺的視軸穩定精度,采用跟蹤微分器作為濾波器,對輸入信號進行濾波,改善隨機噪聲對控制精度帶來的負面影響。跟蹤微分器會產生相位延遲,根據它得到的濾波信號及其微分信號,采用預報方法對濾波后的信號進行補償。算法不依賴對象模型,計算量較小,易于實現。本文闡述了該算法的離散數學表達式,給出數值仿真分析,并在某型航空光電穩定平臺上進行實驗驗證。結果表明:相較于巴特沃斯濾波器,跟蹤微分器提高了階躍響應的性能,最大超調量減少10.5%,上升時間縮短了4.5 ms,調整時間縮短50 ms。基本滿足控制系統的實時性、快速性、穩定可靠、精度高、抗干擾能力強等要求。研究表明跟蹤微分器對于航空光電穩定平臺的精度提高,有比較好的實用價值。
跟蹤微分器;濾波;隨機噪聲;相位延遲;航空光電穩定平臺
1 引 言
航空光電穩定平臺通常應用光電軸角編碼器[1]采集位置信息,利用陀螺傳感器測量平臺轉速,航空光電穩定平臺的發展是和上述這些傳感器的測量精度密切相關的[2]。其中,陀螺傳感器是目前廣泛應用于慣性空間提供基準方向的傳感器,由于陀螺具有進動性和定軸性兩種功能,陀螺以及用陀螺構成的穩定平臺都具備穩定與跟蹤兩個作用[3]。在航空光電穩定平臺中,主要利用陀螺穩定平臺隔離載體受到的擾動,削弱擾動對視軸(LOS)運動的負面影響[4]。陀螺的主要作用是測量反饋,采集平臺角速度信號反饋給控制器,在伺服系統中,從反方向補償平臺角速度的偏差,實現穩定視軸的目的。但是,由于陀螺自身的缺陷[5]和隨機漂移等干擾[6],信號會受到隨機噪聲的污染,顯著降低了陀螺輸出的信噪比,期望的輸出信號疊加了大量的陀螺噪聲信號。所以,在系統的帶寬范圍內,輸出信號在復現輸入信號的同時,混有高頻擾動,即噪聲信號,這些噪聲信號將直接影響系統的控制特性,如過渡過程、跟蹤精度等,不利于視軸的穩定[7]。
為滿足平臺的穩定和跟蹤性能、低速運動的平穩性等實際工程需求,必須對陀螺的測量數據進行濾波處理[8],盡可能地抑制隨機噪聲對視軸穩定精度的影響。并且一些小型平臺受體積和成本的制約,無法應用高精度的陀螺傳感器。
針對上述問題,本文將跟蹤微分器的理論應用于傳感器測量信號,提出了一種抑制隨機噪聲的濾波方法。本算法不需要明確被控對象模型,能夠從含有噪聲的輸出信號中快速準確地提取輸入信號及其微分信號。將此方法應用在處理航空光電穩定平臺中陀螺所測量的角速度信號,并用于速度環的閉環控制,明顯提高了信號的準確性和實時性,提高視軸穩定精度。
2 跟蹤微分器的基本原理
跟蹤微分器(TD)是由中國科學院韓京清研究員提出[9],最初的設計目的是為了解決在實際工程應用中,根據離散或被隨機噪聲污染的觀測信號,精確提取出有用的連續信號及微分信號,但是對跟蹤微分器的濾波性能并沒有進行深入探討。在對跟蹤微分器的進一步研究之后,發現了它可以克服經典的求取微分信號的算法弊端,并且能夠較強地抑制隨機噪聲信號對控制系統的影響。如今,跟蹤微分器發展成為更適合在計算機應用的形式,其濾波性能也進入了人們的視線,因此也被稱為TD濾波器[10]。
跟蹤微分器的結構為:給定一個輸入信號r(t),跟蹤微分器將輸出兩個信號,分別為x1(t)和x2(t),其中x1(t)一直跟蹤輸入信號r(t)的變化,而x2(t)則為x1(t)的微分信號,當x1(t)快速跟蹤r(t)時,便可以將x2(t)作為r(t)的近似微分信號。
跟蹤微分器離散系統形式如下:
(1)
式中,x1、x2均為狀態向量;h為連續系統離散化的積分步長;u為控制輸入函數。
將離散系統(1)的最速控制綜合函數記做u=fhan(x1,x2r,h),算法公式如下:
(2)
其中,fsg(x,d)=[sign(x+d)-sign(x-d)]/2。式中,r為時間常數T的倒數;h為連續系統離散化的積分步長。
把函數u=fhan(x1,x2r,h)代入到系統(1)中,得:
(3)
為了驗證跟蹤微分器的性能,用x1(k)-v(k)代替方程(2)的x1(k),就得到離散化的跟蹤微分器的表達形式:
(4)
跟蹤微分器在濾波的同時,會引起相位延遲。考慮跟蹤微分器可以得到輸入信號的微分值,借鑒運動學中的位移公式,可以采用預報的方法改善輸出信號中的相位延遲[11]。具體做法是將濾波后得到的信號加上微分信號與預報步長的乘積作為近似輸入信號,公式為:
(5)
式(5)為預報了n2步的公式。具體有以下兩種預報的方法:
第一種為“先預報,后微分”,其具體算法如下:
(6)
式中,h1為預報時間,取值通常情況下比跟蹤微分器中的濾波因子h0稍大(1倍到1.5倍)。
第二種為“先微分,后預報”,其具體算法如下:
(7)
這兩種方法對相位損失的補償效果相當,但是“先預報,后微分”的方法在濾波上有更好的效果,所以本文采用“先預報后微分”的方法。
3 噪聲對系統的影響
航空光電穩定平臺的簡易控制系統框圖如圖1所示。
從圖1可以看出,在速度環的反饋環節中,采用陀螺儀作為速度采集傳感器,在此過程中,受到模擬信號的波動、A/D轉換器參考電壓的波動、電磁干擾、A/D轉換精度等干擾,造成陀螺的輸出信號包含有隨機噪聲。在工程應用中,這些隨機噪聲對視軸角位置有很大的影響。其中噪聲的低頻部分(以常值噪聲作為典型信號)主要影響平臺的漂移,噪聲中的高頻部分(用帶限白噪聲作為典型信號)主要影響視軸的抖動,干擾系統成像的清晰度[12]。簡化的速度環控制系統框圖如圖2所示。
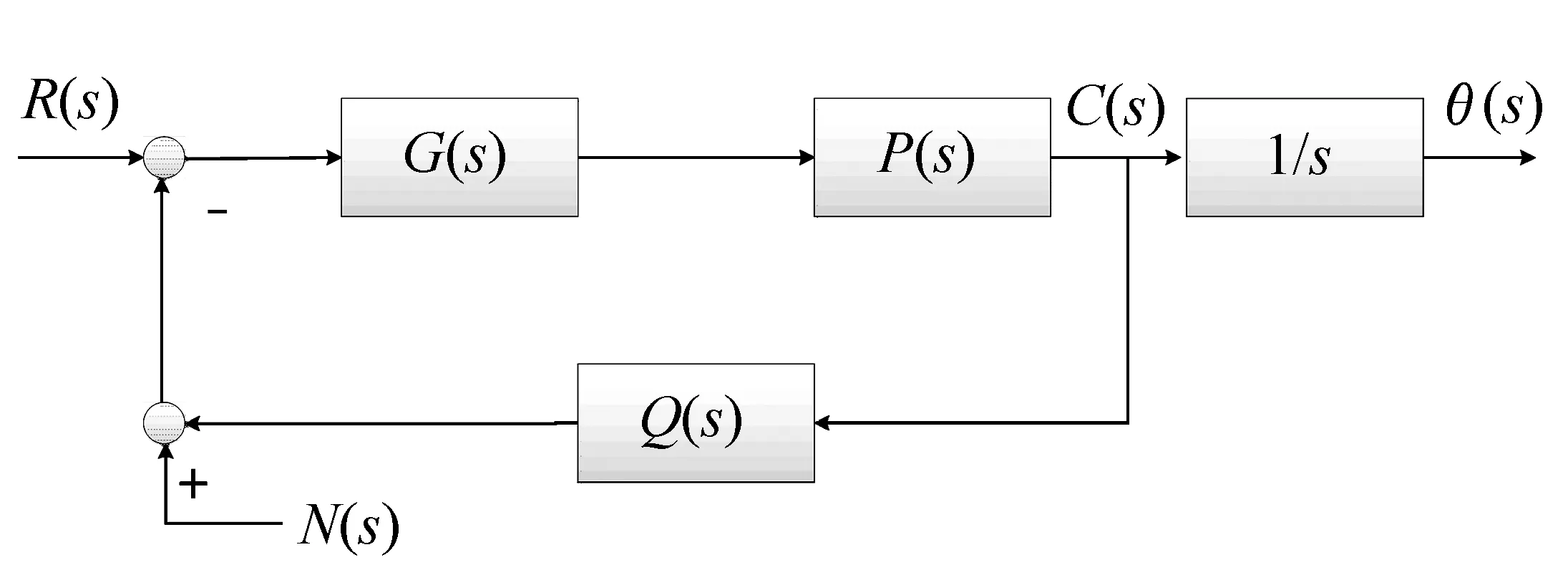
圖2 速度環控制系統框圖 Fig.2 Block diagram of cnotrol system in velocity loop
圖2中,G(s)為控制環節,P(s)為系統模型,Q(s)為陀螺儀,R(s)為輸入信號,C(s)為被控對象的輸出信號,N(s)為陀螺的輸出誤差,θ(s)為視線角偏差。
從陀螺的輸出誤差N(s)到視線角偏差θ(s)的傳遞函數系統框如圖3所示。
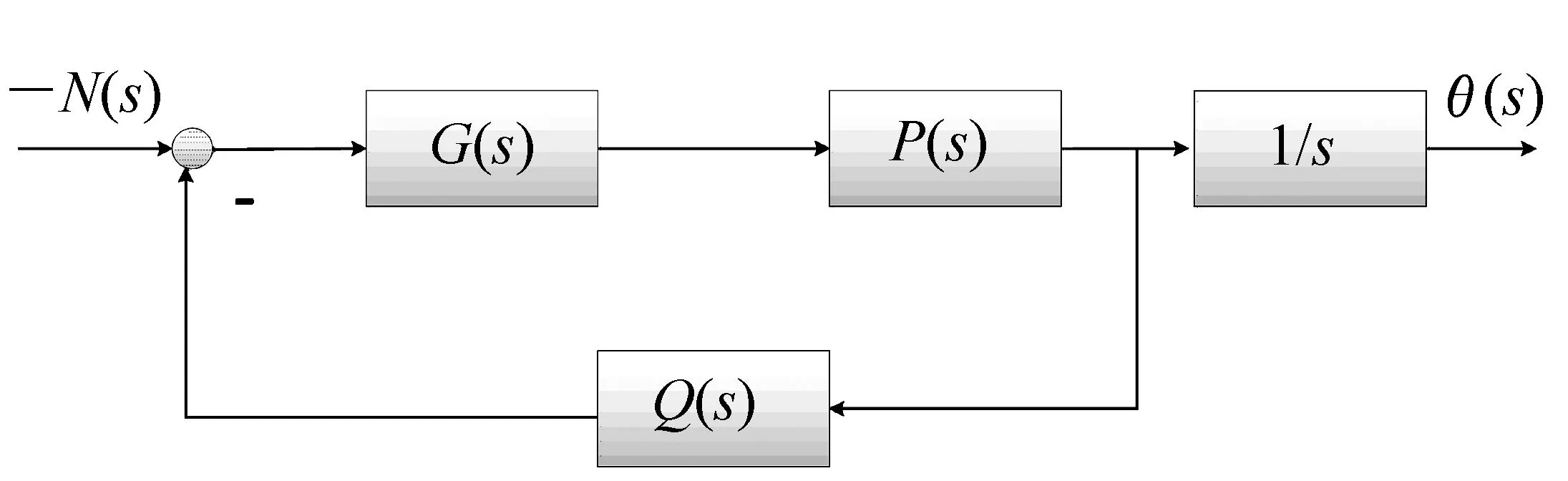
圖3 從N(s)到θ(s)的系統框圖 Fig.3 Block diagram of system from N(s) to θ(s)
由圖3可知,陀螺的輸出誤差在經過積分環節1/s后,會累加到傳感器的視線角偏差,對位置環造成干擾,進而影響視軸的穩定精度。
4 傳感器測量精度的限制
陀螺儀傳感器的測量精度有高有低,但是一些精度高的陀螺儀不僅體積大,而且造價昂貴。小型航空光電穩定平臺受工藝成本和體積的限制,無法配備高精度的陀螺儀。工業中常用的陀螺儀傳感器的價格為幾千到幾萬元不等,圖4所示為qrs14、DSP-1750兩款陀螺。

圖4 qrs14和DSP-1750陀螺傳感器 Fig.4 Gyroscopes of qrs14 and DSP-1750
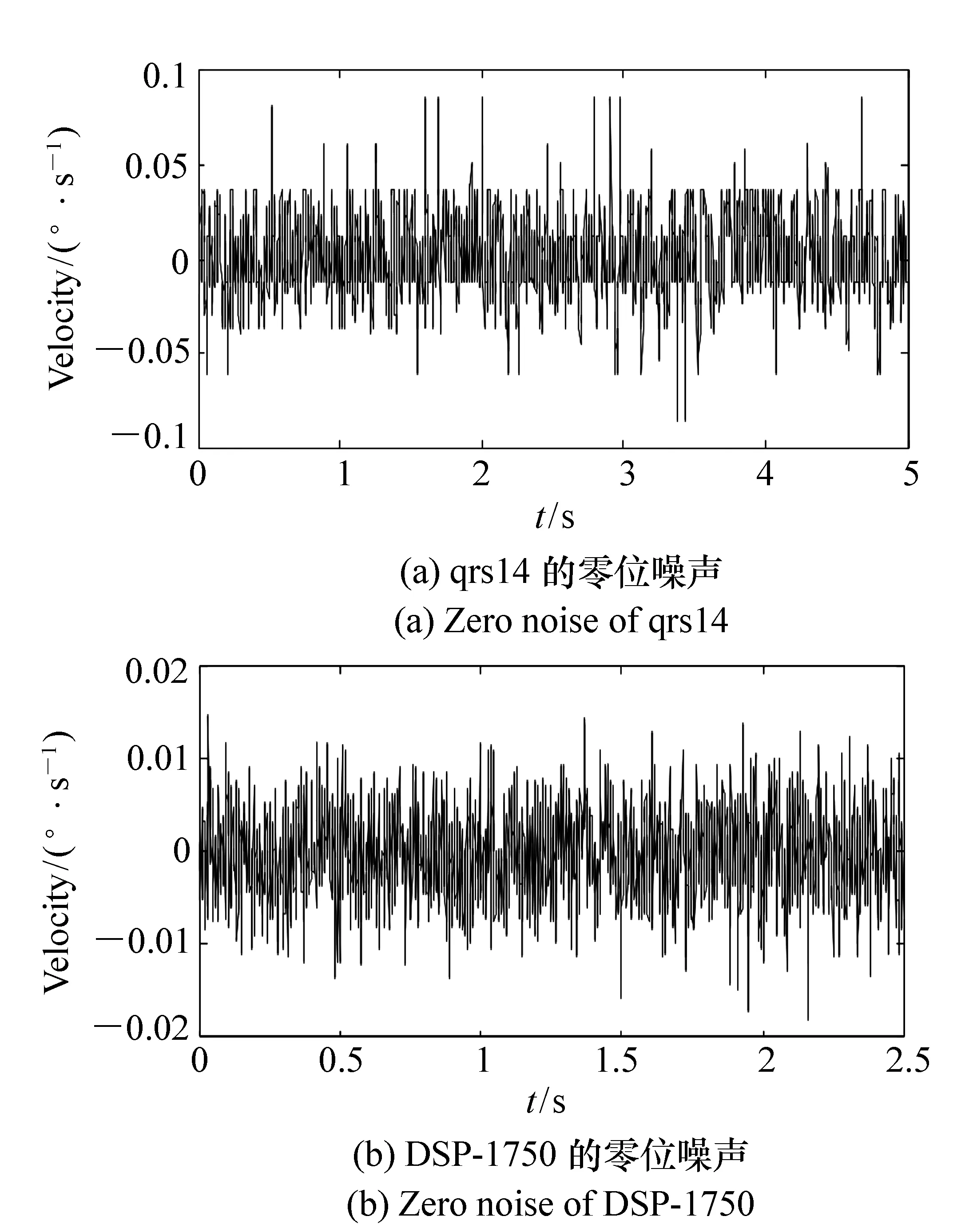
圖5 兩種陀螺的零位噪聲 Fig.5 Zero noise of two kind of gyroscopes
在靜止的實驗條件下,分別采集qrs14和DSP-1750兩款陀螺的零位噪聲,如圖5所示。
由圖5可見,不同的型號的陀螺其零位噪聲有很大的不同。所以,當受到制作成本和產品體積限制時,可以采用濾波的方法來提高傳感器的測量精度,增強小型平臺控制系統性能,進而提高視軸穩定精度。
5 數值仿真
為分析跟蹤微分器的濾波性能和作用效果,利用MATLAB在SIMULINK環境下,搭建跟蹤微分器的仿真模型。設置采樣時間1.25 ms,固定步長、ODE4(Runge-Kutta)算法,仿真時間為0.4 s,其余初始狀態均為零。
5.1 跟蹤微分器的濾波效果
輸入速度信號使光電穩定平臺以幅值15°/s、頻率為10 Hz做正弦運動,利用陀螺儀傳感器采集平臺運動的角速度,并經過A/D轉換器將陀螺采集的模擬量轉換成數字量輸出,系統輸出的原始陀螺信號如圖6所示,利用此陀螺信號進行仿真實驗。其中跟蹤微分器的速度因子r=50 000 000,濾波因子h=0.002。參數r和h的具體選擇原則,文獻[13-14]給出了詳細的說明。
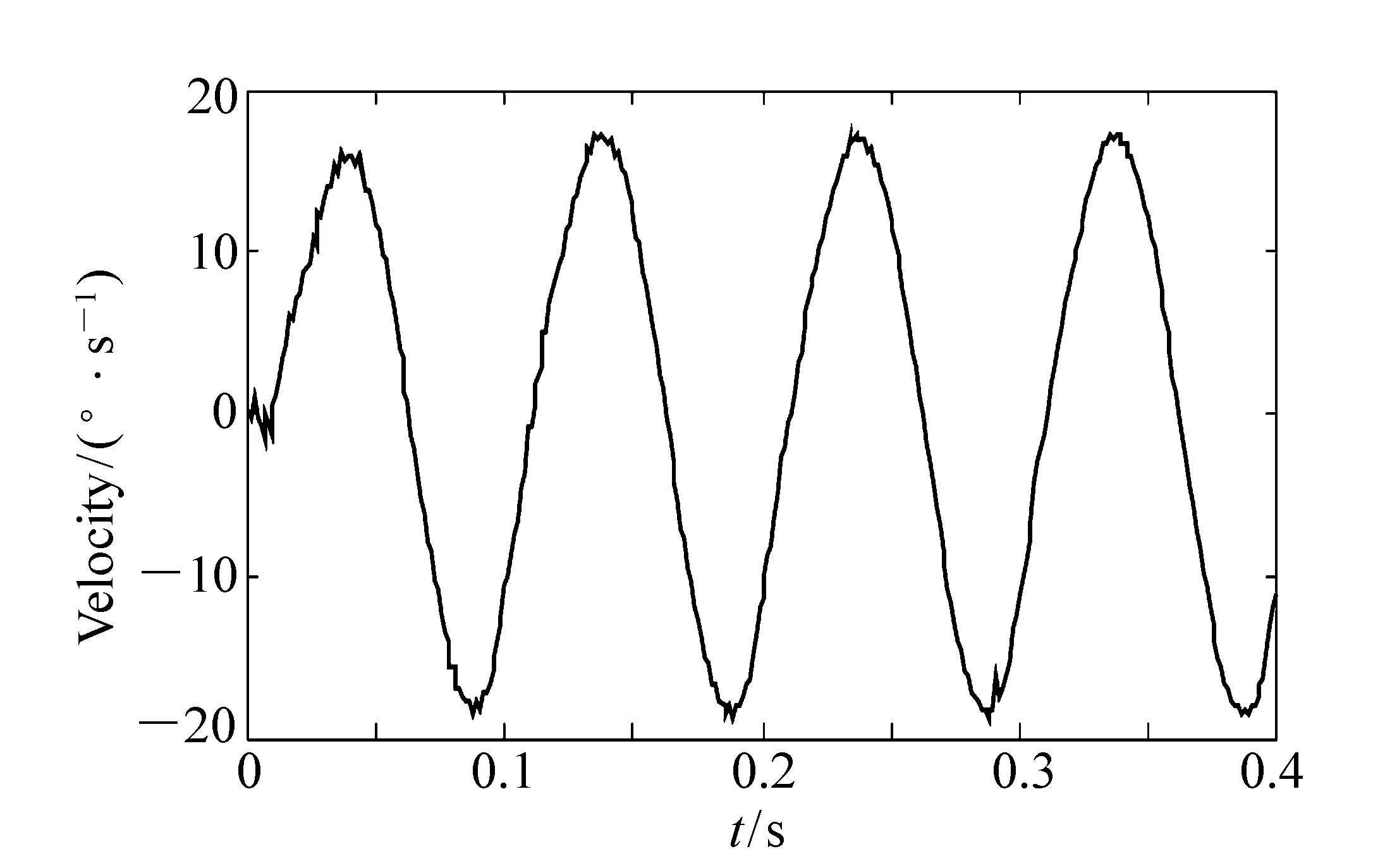
圖6 正弦運動時的原始陀螺信號 Fig.6 Original gyro signal when sine movement
從圖6可以看出,未經過處理的陀螺信號曲線受到噪聲信號的干擾,很不平滑。這樣的信號在實際的工程應用中,會造成平臺的振蕩以及視軸對靶標的指向偏差。
下面采用兩種方法對陀螺信號進行濾波處理,分別為與“預報”方法結合的跟蹤微分器和二階巴特沃斯濾波器。其中預報時間取為0.002,二階巴特沃斯濾波器的帶寬為590 Hz,傳遞函數為:
(8)
兩種濾波效果如圖7所示。
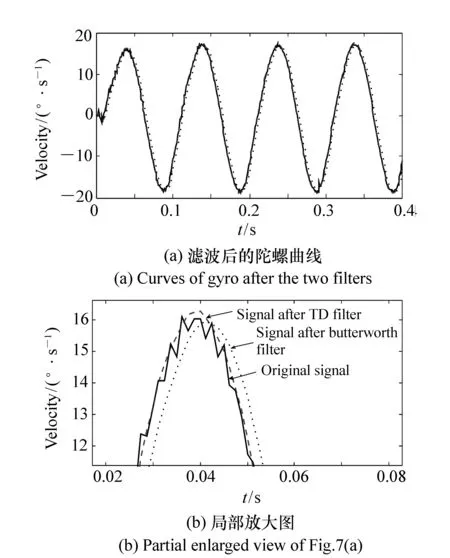
圖7 兩種濾波器對正弦運動的陀螺信號的濾波效果 Fig.7 Signal of Gyroscope filtred by two kinds of filter
由圖7可以看出,上述兩種方法都使陀螺信號的曲線更加平滑,濾波效果好。但是巴特沃斯濾波器的相位滯后比較大,而跟蹤微分器的相位幾乎和原始信號一致,保證了控制系統的實時性。可以看出由“先預報,后微分”的跟蹤微分器所設計的濾波器,在相位方面基本和原信號保持一致,很好的解決了二階巴特沃斯濾波器的相位延遲問題,使濾波效果得到改善,大幅度提升了信號的實時性,有利于改善視軸穩定精度,增強了控制系統的性能。
5.2 跟蹤微分器的抗野值功能
在陀螺的實際測量信號中,由于電路中的電磁干擾以及測量誤差等因素,使得測量值中常常含有偏離真值很遠的野值。
而應用跟蹤微分器很容易解決野值的剔除問題。利用TD剔除野值,也相當于進行一次濾波處理,但是進行濾波處理總是帶來相位的損失,為了補償這種相位損失,依舊利用TD給出的微分信號來進行適當的預報修正。
選取疊加有野值的正弦信號5sin(0.5t)+n(t)作為信號源,其中n(t)=n1(t)+n2(t),n1(t)為幅值在[-0.2,0.2]之間均勻分布的白噪聲,n2(t/300)為幅值在[-10,10]之間均勻分布的白噪聲用于充當野值。信號源的具體形態如圖8所示。
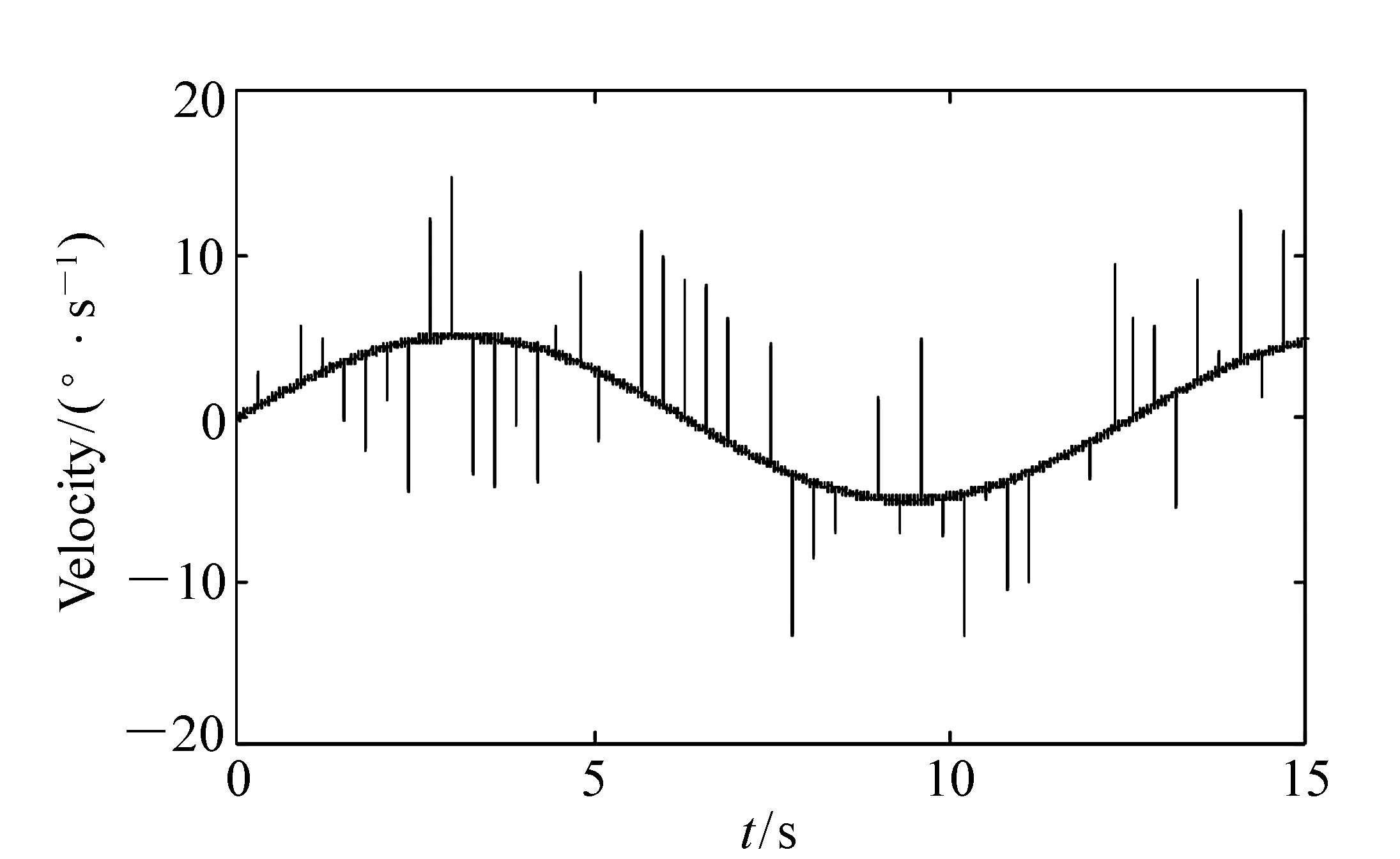
圖8 疊加有野值的正弦信號 Fig.8 Sine signal with abnornnal value
分別用跟蹤微分器(TD)和二階巴特沃斯濾波器對上述信號源進行濾波處理,濾波結果如圖9所示。
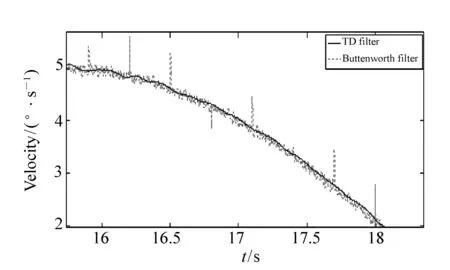
圖9 兩種濾波器對信號野值的剔除能力 Fig.9 Contrast of two kinds of filtes′ ability in removing abnormal value
由圖9可以明顯看出,經過跟蹤微分器濾波后,信號中已經沒有了異常值,曲線比較平滑,但是,信號在而巴特沃斯濾波后仍然存在較為突兀的野值。這說明跟蹤微分器的抗野值能力明顯優于二階巴特沃斯濾波器,可以剔除掉信號中明顯異常的數據,使陀螺信號的精度提高,適用于工程上的需求應用。
6 實驗驗證
為了驗證在實際工程中跟蹤微分器的濾波效果,在某型航空光電穩定平臺上進行實驗。實驗環境如圖10所示,為某型航空光電穩定平臺和用于模擬飛機飛行中姿態變化的模擬轉臺。
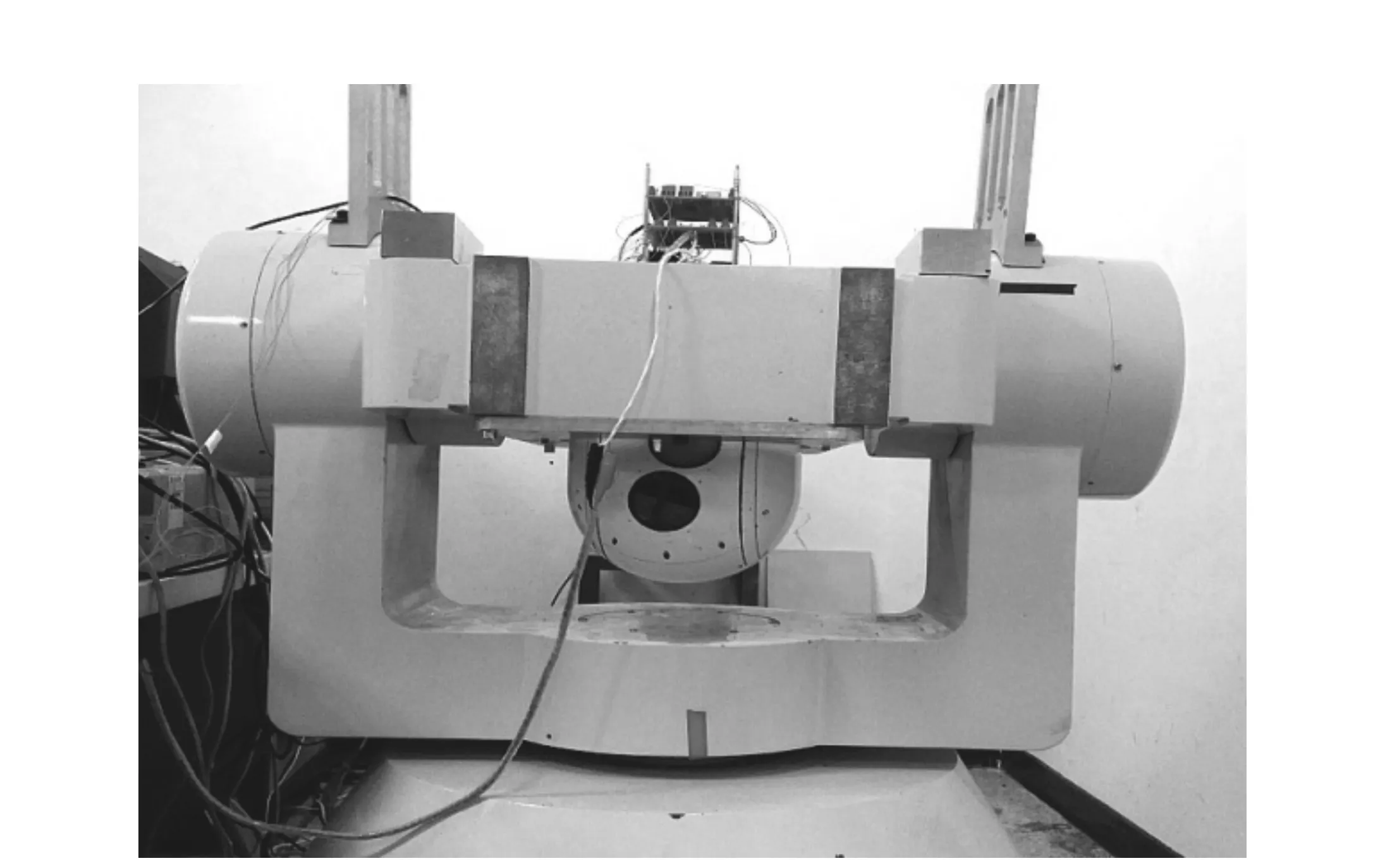
圖10 航空光電穩定平臺和飛行模擬轉臺 Fig.10 Aerial photoelectrical stabilized platform and swing table
以陀螺采集的角速度作為跟蹤微分器的輸入,選取的陀螺型號為qrs14。控制系統采用速度閉環反饋控制,將濾波后的陀螺信號反饋給輸入,進行反方向補償平臺在運動過程中的角速度偏差。輸入恒定速度值,讓平臺勻速轉動,轉動速度即輸入值為10°/s,分別觀察在跟蹤微分器控制下和在二階巴特沃斯濾波器控制下的系統的階躍響應,兩種濾波控制下系統的階躍響應曲線如圖11所示。
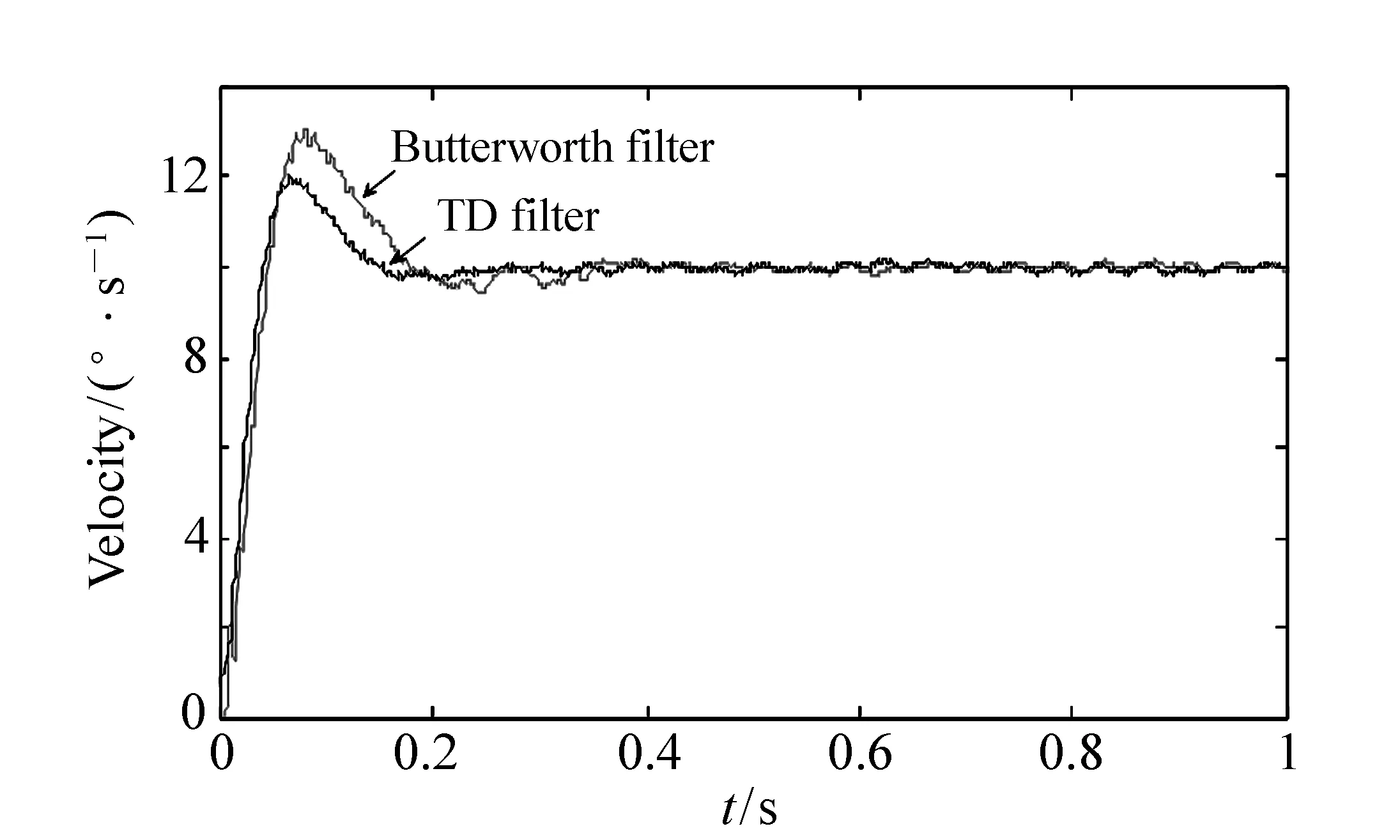
圖11 兩種濾波方法的速度階躍響應 Fig.11 Step response of velocity of two kinds of filters
從圖11可以直觀的看出,跟蹤微分器控制下的系統相較于巴特沃斯濾波器控制的系統,其波動小,平穩性好, 最大超調量減少10.5%,上升時間縮短了4.5 ms,調整時間縮短50 ms。結合預報方法后,系統的響應速度快,調節時間短,有效的提升了控制系統性能。
為了避免重復性誤差,再次對平臺進行不同速度的階躍響應實驗,依次設定恒定速度為20°/s、30°/s、40°/s、50°/s,比較跟蹤微分器和巴特沃斯濾波器控制下的系統的階躍響應。巴特沃斯濾波器控制下的系統階躍響應如表1所示,跟蹤微分器控制下的系統階躍響應如表2所示。
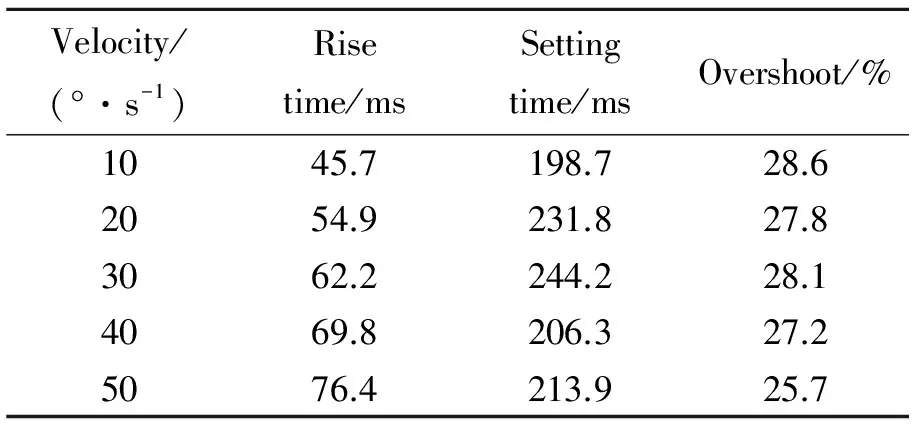
表1 巴特沃斯控制下的系統階躍響應性能
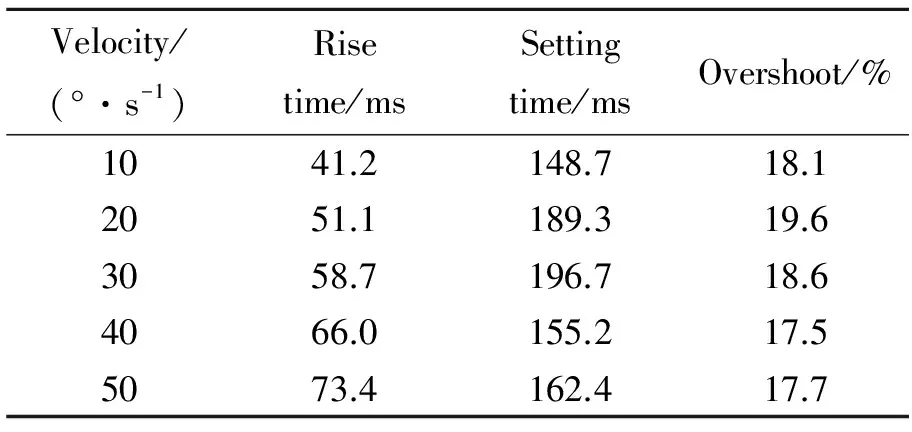
表2 跟蹤微分器控制下的系統階躍響應性能
通過對比表1、表2中的數據,可以看出平臺在不同的轉速下,跟蹤微分器控制下的系統性能均優于二階巴特沃斯濾波器控制下的系統性能,優化了系統的響應速度,減小了超調量。
根據上述實驗結果可知,本文所提出的結合“預報”方法的跟蹤微分器的濾波算法能夠有效降低信號的隨機噪聲,優化控制系統性能,提高陀螺傳感器的測量精度,進而提高視軸穩定精度,具有較高的可行性和實際工程應用價值。
7 結 論
給出了一種基于跟蹤微分器的信號濾波方法,算法不需要明確被控對象模型,只有兩個參數需要調整,待調參數有明確的功能和作用范圍,易于調節和實現控制。
利用跟蹤微分器得到的微分信號,結合“先預報后微分”的方法,改善了由跟蹤微分器所產生的相位延遲問題。通過仿真實驗,驗證了跟蹤微分器的抗野值功能,能夠有效的剔掉信號中的明顯異常值,顯著提高了信號的準確性和實時性。
在某型航空光電穩定平臺上進行了操作實驗。結果表明,跟蹤微分器波動小,平穩性好, 最大超調量減少10.5%,上升時間縮短了4.5 ms,調整時間縮短50 ms,均優于二階巴特沃斯濾波器,達到了預期目標。
本文提出的方法實時性好,準確性高,易于實現,可以較好地改善輸入信號的隨機噪聲問題,具備抗野值的功能。有效地解決了在小型平臺中無法應用高精度傳感器的問題,節約了成本。應用跟蹤微分器實現對輸入信號的良好復現,增強陀螺傳感器的測量精度,從而提高視軸穩定精度,優化控制系統的性能。
[1] 孫樹紅,趙長海,萬秋華,等.小型光電編碼器自動檢測系統[J].中國光學,2013,6(4):600-606. SUN SH H,ZHAO CH H,WAN Q H,etal.. Automatic detection system for miniature photoelectrical encoder[J].ChineseOptics,2013,6(4):600- 606.( in Chinese)
[2] 李賢濤,張葆,沈宏海.基于自抗擾控制技術提高航空光電穩定平臺的擾動隔離度[J].光學 精密工程,2014,22(8):2223-2231. LI X T,ZHANG B,SH H H. Improvement of isolation degree of aerial photoelectrical stabilized platform based on ADRC[J].Opt.PrecisionEng.,2014,22(8):2223-2231.(in Chinese)
[3] 李慧,吳軍輝,朱霞,等.速率陀螺式激光導引頭穩定跟蹤原理分析與仿真[J].紅外與激光工程,2011,40(7):1337-1341. LI H,WU J H,ZHU X,etal.. Analysis and tracking principle for rate gyroscope laser seeker[J].InfraredandLaserEngineering,2011,40(7):1337-1341.(in Chinese)
[4] 叢爽,孫光立,鄧科,等.陀螺穩定平臺的自抗擾及其濾波控制[J].光學 精密工程,2016,24(1):169-177. CONG SH,SUN G L,DENG K,etal.. Active disturbance rejection and filter control of gyro-stabilized platform[J].Opt.PrecisionEng.,2016,24(1):169-177.(in Chinese)
[5] KIRKKO-JAAKKOLA M,COLLIN J,TAKALA J. Bias prediction for MEMS gyroscopes[J].IEEESensorsJournal,2012,12(6):2157-2163.
[6] PARK S,HOROWITZ R. Adaptive control for the conventional mode of operation of MEMS gyroscopes[J].MicroelectromechanicalSystemsJ.,2003,12(1):101-108.
[7] 汪永陽,戴明,丁策,等.大光電穩定平臺中高階擾動觀測器的應用[J].光學 精密工程,2015,23(2):459-466. WANG Y Y,DAI M,DING C,etal.. Application of high order observer in EO stabilized platform[J].Opt.PrecisionEng.,2015,23(2):459-466.(in Chinese)
[8] 孫輝.機載光電平臺目標定位與誤差分析[J].中國光學,2013,6(6):912- 918. SUN H. Target localizationand error analysis for airborne electro- optical platform[J].ChineseOptics,2013,6(6):912-918.( in Chinese)
[9] 韓京清,王偉.非線性跟蹤-微分器[J].系統科學與數學,1994,14(2):177-183. HAN J Q,WANG W. Nonlinear tracking differentiator[J].SystemsScienceandMathematicalScience,1994,14(2):177-183.(in Chinese)
[10] 韓京清,袁露林.跟蹤-微分器的離散形式[J].系統科學與數學,1999,19(3):268-273. HAN J Q,YUAN L L. Discrete tracking differentiator[J].SystemsScienceandMathematicalScience,1999,14(3):268-273.(in Chinese)
[11] 韓京清.自抗擾控制技術[J].前沿科學,2007,1(1):24-31. HAN J Q. Active disturbance rejection control technique[J].FrontierScience,2007,1(1):24-31.(in Chinese)
[12] TIAN D P,SH H H,DAI M. Improving the rapidity of nonlinear tracking differentiator via feedforward[J].IEEETransactionsonIndustrialElectronics,2014,61(7):3736-3743.
[13] 韓京清,黃遠燦.二階跟蹤—微分器的頻率特性[J].數學的實踐與認識,2003,03:71-74. HAN J Q,HUANG Y C. Frequency characteristic of second-order tracking-differentiator[J].MathematicsinPracticeandTheory,2003,33(3):71-74.(in Chinese).
[14] 朱承元,楊滌,荊武興.跟蹤微分器參數與輸入輸出信號幅值頻率關系[J].電機與控制學報,2005,9(4):376-379. ZHU CH Y,YANG D,JING W X. Relation equations among the parameters of tracking-differentiator and the amplitude and frequency of its input-output signals[J].ElectricMachinesandControl,2005,9(4):376-379.(in Chinese)
Application of tracking differentiator to gyro signal denoising
ZHU Feng1,2, ZHANG Bao1*, LI Xian-tao1, JIN Chao-qiong1,2, SHEN Shuai1,2
(1.ChangchunInstituteofOptics,FineMechanicsandPhysics,ChineseAcademyofSciences,Changchun130033,China: 2.UniversityofChineseAcademyofSciences,Beijing100049,China)
In order to improve the aviation optical axis stabilization accuracy of the photoelectric stabilized platform, we use tracking differentiator as filter to decrease the negative effects of random noise on the control accuracy. on the basis of the filtered signals and their differentiated signals, the phase delays after being filtered are compensated by predicting. This algorithm is model-independent and easy to implement with small calculation. In this paper, the discrete mathematics of the algorithm is described, and the numerical simulation and experimental verification are conducted and applied to the photoelectric stabilized platform for aviation. The results show that the tracking differentiator, compared with the Butterworth filter, can improve the performance of the step response, shorten the maximum overshoot by 10.5%, cut down the rise time by 4.5 ms, shorten the setting time by 50 ms. The simulation and experiment proved the validity and practicability of the algorithm. It can meet the system requirements for real time, higher precision and rapid speed, as well as strong anti-jamming and stabilization. It also indicates that the tracking differentiator provide good value for the improvement of the precision of the photoelectric stabilized platform for aviation.
tracking differentiator;filter;random noise;phase delay;photoelectric stabilized platform for aviation
2017-01-25;
2017-03-29
國家高技術研究發展計劃(863計劃)資助項目(No.2013AA122102) Supported by National High-tech R&D Program of China(No.2013AA122102)
2095-1531(2017)03-0355-08
TP273
A
10.3788/CO.20171003.0355

朱 楓(1992—),女,吉林省吉林市人,碩士研究生,2014年于山東大學獲得學士學位,主要從事伺服控制及數字濾波方面的研究。E-mail:zf0109@126.com
張 葆(1966—),男,吉林磐石人,研究員,博士生導師,1989年、1994年于長春光機學院分別獲得學士、碩士學位,2004年于中國科學院長春光學精密機械與物理研究所獲得博士學位,主要從事航空光電成像技術方面的研究。E-mail:cleresky@vip.sina.com
*Correspondingauthor,E-mail:cleresky@vip.sina.com
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06