單脈沖雷達基于相參積累的多目標分辨
2017-06-05 15:01:58高德寶唐弘超
無線電工程 2017年6期
關鍵詞:信號
高德寶,陳 浩,印 勇,張 壹,唐弘超
(中國人民解放軍63778部隊,黑龍江 佳木斯 154002)
單脈沖雷達基于相參積累的多目標分辨
高德寶,陳 浩,印 勇,張 壹,唐弘超
(中國人民解放軍63778部隊,黑龍江 佳木斯 154002)
單脈沖遠程精密跟蹤測量雷達是空間目標探測、編目和識別的主要設備,具有跟蹤精度高、作用距離遠等特點,但只具備單目標跟蹤能力。通過相參積累的事后數據分析方法,解決了波門外目標的外測數據丟失的情況,實現了多目標的分辨監測。仿真結果表明,基于相參積累的多目標分辨算法可有效地實現多目標監視與辨別,為軌道碰撞預警和空間目標識別等任務提供了理論參考。
單脈沖雷達;相參積累;多目標;回波
0 引言
隨著航天科技水平的提高,在軌衛星數量逐年增加,軌道碰撞預警和重點目標監視任務日趨繁重。單脈沖雷達主要負責空間目標的編目工作、執行軌道碰撞預警及重點目標監視等任務。在跟蹤期間,經常出現多個目標落于同一波束內的情況,但雷達僅能獲得波門內目標的外測數據,造成大量有價值信息丟失。針對此類問題,本文采用處理相參積累后的回波數據的方法,對脈壓后的信號進行包絡對齊和相位補償,積累天線接收到的回波信號,記錄同一波束內多個目標的距離、信噪比等信息,經事后處理,即可分辨出同一波束內多個目標的信息,從而實現多目標分辨的能力[1-2]。
1 相參積累的優勢
對于單脈沖雷達而言,利用發射脈沖間相位連續的特性對回波信號進行相參積累,通過FFT變換,可以達到提高檢測信噪比的目的。并且在跟蹤過程中,有時出現因目標RCS太小而導致未能發現目標的情況。對于弱小目標,回波很容易被噪聲淹沒。通過相參積累不僅可以提高信噪比,增加其檢測概率,還能有效避免因目標沒有落在波束中心而造成虛警[2]。此外,在監視衛星解體時,基于相參積累的多目標分辨在同類雷達中具有無可比擬的優越性。較小碎片的回波信號經脈沖積累后,都能被檢測出來,因此可以準確判斷出解體后衛星碎片的數量。在雷達設備A/R顯示器上顯示為多個目標回波,如圖1所示。
雷達設備在進行處理時,無法得到波門外的數據,從而造成部分有用信息的丟失。由于相參積累具有記錄同一波束內所有目標回波信息的特性,因此可以通過分析回波數據的方法來間接實現多目標監視與辨別。
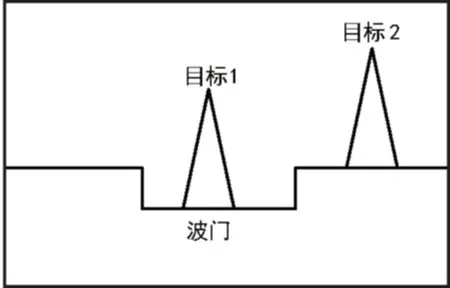
圖1 多目標回波A/R顯示器示意
2 多目標分辨實現方法
2.1 信號模型
假設在單目標情況下,雷達回波信號經相干檢波后可描述為[4]:

(1)
式中,Sa(t)為歸一化回波包絡;R(t)為某時刻目標的徑向距離。短時間內假設目標徑向近似勻速直線運動,則

(2)

R(t)=r0+v(mTp+nTS) 。
(3)
將式(3)代入式(1)得:

(4)
由于2vnTS/c<<1/B,故慢時間內目標運動對回波包絡走動的影響可忽略。回波信號可簡化為:
(5)
對M個脈沖回波每一個對應采樣位置進行FFT相參積累得:
b(f,n)=FFTm(s(m,n))。
(6)
由于脈沖間的目標距離走動會造成相參積累時的非均勻加權,積累性能下降,同時如果包絡走動過大對得到的多普勒-距離平面數據相位的線性度產生影響。因此須對積累脈沖的數目有一定的限制,使目標的包絡走動控制在一定范圍內[5-6]。以積累損失小于3 dB為約束條件,積累周期內包絡走動不能超過主瓣寬度的0.7倍,則最多可積累脈沖數為:
M≤Mmax=round[1.4/(B·Δτ)] 。
(7)
式中,B為信號帶寬;Δτ為相鄰周期的壓縮脈沖間的包絡走動量,
Δτ=2v/(fr·c)。
(8)
v為目標運動速度;fr為脈沖重復頻率。
每M個脈沖回波經過FFT積累形成一幀多普勒-距離序列,K幀這樣的序列就形成了時間-距離-多普勒三維序列b(k,f,n)。單個目標形成一個時間-距離-多普勒三維序列,多個目標就形成了多個時間-距離-多普勒三維序列。
2.2 信號處理
2.2.1 處理流程
目標回波信號經過中頻采樣后進行數字下變頻,而后通過匹配濾波器完成脈沖壓縮。由于空間目標的高速運動,不同脈沖重復周期內的回波發生包絡走動和相位模糊,從而無法滿足相參積累的條件。根據補償信息對回波進行包絡對齊和相位補償后,通過一個FFT濾波器組即可實現空間目標的相參積累[7-8]。信號處理流程如圖2所示。

圖2 信號處理流程
2.2.2 包絡對齊
包絡對齊原理如圖3所示。

圖3 包絡對齊示意
包絡對齊的原理是通過距離補償信息計算每個周期的回波時延,根據每個回波信號相對于第一個回波的時延對積累的回波進行時移,從而實現包絡對齊[9]。包絡對齊具體是通過采樣波門方法,即根據補償信息來計算每個脈沖重復周期的波門延遲,然后用波門對回波采樣數據進行截取,只對波門內的數據進行處理,不同脈沖對應的波門延遲時間與目標包絡走動量相互抵消,從而實現了包絡對齊。
2.2.3 相位補償
空間目標高速運動使回波產生相位模糊,導致相參積累結果的多普勒譜展寬,降低了相參積累的性能。需要對回波進行速度補償,消除高速運動帶來的附加相位[10-11]。
在信號模型描述中,目標的回波多普勒體現在相位項:
式中,該相位包含了目標的瞬時運動狀態,需要進行運動補償。相參補償方法是利用距離補償信息Rref構造相位補償因子:
將每個PRT的回波乘以與其對應的補償相位項。
2.2.4 相參積累
脈壓后的信號經過包絡對齊和相位補償后,不同脈沖回波的距離和相位得到校正,滿足相參積累的條件。相參積累后,即可得到目標的時間-距離-多普勒三維序列b(k,f,n)。由于在檢測跟蹤時,雷達會利用一定的算法選擇一個目標作為要跟蹤的目標,因此只能跟蹤同一波束內多個目標中的一個目標。根據相參積累的特點,當多個目標落于同一波束內,雷達就會對每個目標回波都進行脈沖積累。因此,在相參積累后,雷達會記錄同一波束內多個目標的回波信息,這就為多目標的分辨提供了數據[12-14]。
2.3 目標分辨
在得到目標的時間-距離-多普勒三維序列b(k,f,n)后,可以利用Matlab對這個三維序列進行處理,顯示出同一波束內多個目標的三維向量。
根據此圖,不僅可以確定該波束內目標的準確數量,還能判讀出多個目標的相對位置信息,通過多個目標多普勒距離維的展開,判斷這幾個目標的徑向距離差,從而確定其相對位置。對于軌道相近、運動方向相反的2顆衛星,若在某一時刻,其徑向距離差小于一定限值,則可做出軌道碰撞報警[15-16]。在監視衛星解體時,雷達可以實時跟蹤該衛星,在得到多個目標碎片的回波信息后,通過Matlab處理,可以準確判斷解體衛星產生的碎片數量。基于相參積累的多目標分辨還可以為其他任務提供輔助驗證和數據參考[17-18]。
3 仿真測試與應用結果分析
設置仿真參數:波長0.1 m;脈壓后脈寬0.6 μs;脈沖重復頻率250 Hz。設跟蹤波門始終對準目標1中心,則相對波門中心有如表1所示。

表1 相對波門中心
加性噪聲為高斯白噪聲,脈壓后信噪比為0 dB,脈沖積累幀數64幀。積累前后回波對比如圖4所示。

(a) 脈沖積累前回波

(b) 脈沖積累后回波圖4 積累前后回波對比
由于目標1與目標2較為接近,因此在回波中無法分辨出4個目標,可以通過對目標一回波做傅里葉分析,利用速度區分2個目標,通過觀察,明顯看出2個尖峰,如圖5所示。

圖5 對目標進行傅里葉分析
4 結束語
論述了單脈沖雷達基于相參積累的多目標分辨方法,打破了單脈沖雷達只能實現單目標跟蹤與識別的局限性。提出對同一波束內的多個目標回波分別進行相參積累,通過數據處理的方式,完成多目標分辨與監視的功能,提高了雷達接收原始數據的利用率,提升了單脈沖雷達執行軌道碰撞預警和空間目標識別監視等任務的能力,為多種試驗任務的順利執行提供決策方法、輔助驗證和數據參考。
[1] 朱玉鵬,李朝偉,黎 湘,等.單脈沖雷達多目標分辨技術研究[J].電光與控制,2004,11(4):7-10.
[2] 齊 凱.單脈沖雷達多目標檢測技術的研究[M]. 哈爾濱:哈爾濱工業大學, 2006.
[3] 徐 玲,吳增輝.相參積累后雷達目標參數的自動錄取[J].現代雷達,2000,22(2):32-34.
[4] 陳 翼,王盛利.一種基于相參積累的檢測前跟蹤算法[J].現代雷達,2010,32(5):26-30.
[5] 王 俊,張守宏.微弱目標檢測的包絡移動補償方法[J].電子學報,2000,28(12):56-59.
[6] 龐存鎖,侯慧玲. 基于包絡補償的高速多目標檢測算法[J].彈箭與制導學報, 2013, 33(3):163-166.
[7] 張 健,付 佗,陳德峰,等.脈沖測量雷達探測中高軌目標技術研究[J].飛行器測控學報,2012,31(2):89-94.
[8] 馬 林.空間目標探測雷達技術[M].北京:電子工業出版社,2013.
[9] ACTON F S.Numerical Methods That Work[J].Washington:MAA,C14.,1970(4):581-582.
[10] 李 潺,衣尚軍,云 濤,等.改進的基于圖像評價準則的相位補償方法[J].無線電工程,2014,44(12):29-32.
[11] 李 璽,倪晉麟,劉國歲,等. 基于圖像準則的SAR/ISAR相位補償技術的研究[J].電子與信息學報, 2000, 22(2):279-289.
[12] 馬君國.空間雷達目標特征提取與識別方法研究[J].現代防御技術,2006,34(5):91-94.
[13] 代大海.極化雷達成像及目標特征提取研究[D].長沙:國防科學技術大學,2008.
[14] 邊曉燕,熊 娣.單脈沖雷達探測中高軌道目標加裝設備研制實施方案[M].北京:北京理工大學,2010.
[15] 杜 攀,郁文賢,胡衛東,等. 常規單脈沖雷達體制下的多目標近距離分辨[J].系統工程與電子技術, 1999, 21(11):23-25.
[16] 張 健,付 佗. 脈沖雷達探測中高軌道目標方法及試驗[J].飛行器測控學報, 2012, 31(2):89-94.
[17] 郭 龍,熊 偉,李牧東.一種基于WSN的機器人三維精確定位算法[J].無線電工程,2012,42(8):5-7.
[18] 徐紅軍.無線傳感器網絡環境下移動機器人節點定位算法研究[D].長沙:湖南工業大學,2014.
Pulse Radar’s Multi-target Resolving Based on Coherent Integration
GAO De-bao,CHEN Hao,YIN Yong,ZHANG Yi,TANG Hong-chao
(Unit63778,PLA,JiamusiHeilongjiang154002,China)
Monopulse tracking radar is the main equipment for space target detecting,cataloging and recognition.This equipment features high tracking precision and long operating range.However,it can only track single target.In this paper,we use post analysis of coherent integration to solve the tracking data loss situation for the gate outside the target and perform multi-targets resolution and surveillance.Simulation results show this pulse radar multi-target resolving method based on coherent integarion can realize multi-target resolution and identification,which provides reference for orbit collision warning and space target recognition.
monopulse;coherent integration;multi-target;echo
2017-03-07
10.3969/j.issn.1003-3106.2017.06.06
高德寶,陳 浩,印 勇,等.單脈沖雷達基于相參積累的多目標分辨[J].無線電工程,2017,47(6):24-26,55.[GAO Debao, CHEN Hao, YIN Yong, et al. Pulse Radar’s Multi-target Resolving Based on Coherent Integration[J].Radio Engineering,2017,47(6):24-26,55.]
TP391.4
A
1003-3106(2017)06-0024-03
高德寶 男,(1983—),技師。主要研究方向:航天測量與控制。
陳 浩 男,(1988—),技師。主要研究方向:航天測量與控制。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06