基于霍夫變換的可見光虹膜圖像定位
2017-06-05 14:15:40晏峻峰彭清華費洪曉
計算機技術(shù)與發(fā)展 2017年5期
穆 珺,晏峻峰,彭清華,費洪曉
(1.湖南中醫(yī)藥大學 數(shù)字中醫(yī)藥協(xié)同創(chuàng)新中心,湖南 長沙 410208;2.中南大學 軟件學院,湖南 長沙 410075)
基于霍夫變換的可見光虹膜圖像定位
穆 珺1,晏峻峰1,彭清華1,費洪曉2
(1.湖南中醫(yī)藥大學 數(shù)字中醫(yī)藥協(xié)同創(chuàng)新中心,湖南 長沙 410208;2.中南大學 軟件學院,湖南 長沙 410075)
虹膜定位是虹膜識別中的關(guān)鍵步驟,而非理想條件下的可見光虹膜圖像定位算法則是近年來的研究熱點。為了提高虹膜定位的精度,提出了一種基于霍夫變換的可見光虹膜圖像定位算法,分析并確定了先定位虹膜外邊界、再定位內(nèi)邊界的順序,以提高邊界定位準確度;針對外邊界定位存在的問題,利用可見光虹膜圖像顏色分布的先驗信息,進行了邊緣檢測與篩選,提高了定位的速度與準確度;在此基礎(chǔ)上,借助瞳孔和虹膜的位置關(guān)系指導虹膜內(nèi)邊界定位,進行了高光噪聲檢測與去除,采用基于距離約束的霍夫變換,排除噪聲影響和減少計算時間。實驗結(jié)果表明,該算法具有較高的定位準確度,并且能處理諸如嚴重遮擋、成像模糊、區(qū)域?qū)Ρ榷鹊汀⒑缒ぜy理與隱形眼鏡等干擾情況下的虹膜圖像。
虹膜定位;可見光虹膜圖像;顏色分布先驗;霍夫變換
1 概 述
虹膜定位是虹膜識別中的關(guān)鍵步驟,虹膜定位算法的性能,如準確度、速度、魯棒性,一直都是研究的熱點。現(xiàn)有大多數(shù)傳統(tǒng)虹膜定位技術(shù)是基于Daugman[1]和Wildes[2]率先提出的算法[3-4]。然而,傳統(tǒng)虹膜定位算法一般針對理想條件下采集得到的近紅外虹膜圖像,當涉及到非理想條件下的可見光虹膜圖像,存在如眼瞼睫毛等遮擋、模糊、傾斜角度,以及高光、低對比度等因素影響時,傳統(tǒng)虹膜定位算法的性能無法得到保證[5-7]。
為此,研究者們開始關(guān)注非理想條件下的可見光虹膜圖像定位算法。Puhan等[8]提出了一種非理想虹膜圖像的分割算法,基于傅里葉頻譜密度圖像近似表示虹膜分布,再逐行掃描得到虹膜與周邊區(qū)域的潛在邊界點,并限定閾值排除其中噪聲,得到虹膜定位結(jié)果。該方法具有確定時間復雜度,但無法解決傾斜角度的問題,同時在關(guān)鍵操作中對于閾值參數(shù)比較依賴[3]。Radman等[9]通過圓形Gabor小波變換得到瞳孔中心的粗略定位,再利用小窗口限制搜索范圍,提高霍夫變換的定位速度和準確度。該方法的缺陷是對于瞳孔區(qū)域存在眉毛、睫毛和頭發(fā)等干擾的圖像,其瞳孔定位會受到影響[3]。Jan等[5]提出了一種魯棒的虹膜圖像定位算法,先進行高光噪聲抑制,再使用兩步策略進行瞳孔與虹膜邊界定位,并通過徑向梯度和主動輪廓相結(jié)合的方法規(guī)范化虹膜的圓形邊界,但在可見光虹膜數(shù)據(jù)集的定位準確度不夠高。Khalighi等[10]提出的算法先進行高光檢測與中值濾波,再閾值化得到低亮度區(qū)域,從中選擇面積最大且離心率最小的連通區(qū)域作為瞳孔,并估計瞳孔半徑與圓心,最后利用霍夫變換定位虹膜外邊界。該算法能處理旋轉(zhuǎn)、縮放、模糊、遮擋等情況,但所采用的高光噪聲處理的方法對于可見光虹膜圖像不夠適用[3]。Frucci等[11]基于分水嶺算法進行虹膜定位,但是沒有給出瞳孔定位方法。Sahmoud等[12]使用K均值聚類得到虹膜所在的連通區(qū)域,并進行Canny邊緣檢測與霍夫變換,定位出虹膜外邊界,再進行噪聲去除與亮度調(diào)整,最終定位出瞳孔邊界。Kaur等[13]在模糊C均值聚類與噪聲去除的基礎(chǔ)上進行邊緣檢測,并通過霍夫變換定位虹膜外邊緣,進而去除眼瞼與睫毛遮擋,并最終定位瞳孔邊界。文獻[12-13]提出的方法在Canny邊緣檢測中都偏向于豎直方向邊緣,因此對于傾斜角度圖可能存在問題。
國內(nèi)學者也進行了相關(guān)研究。例如,吳國龍等[14]提出了一種基于人眼檢測和二值投影的虹膜定位方法,能有效定位非理性條件下的虹膜圖像。萬洪林等[15]提出了一種基于霍夫變換與圖像灰度增強的虹膜定位方法,能正確檢測非理想虹膜的邊界。苑瑋琦等[16]提出了一種基于橢圓投影的非理想虹膜定位算法,可以對角度偏離的虹膜進行有效定位。然而上述方法主要是針對近紅外虹膜圖像;對于非理想條件下的可見光虹膜圖像,其適應性和準確度還有待驗證。
綜上所述,盡管非理想條件下的可見光虹膜圖像定位算法近年來進行了大量的研究并取得一定進展,但還未成熟。針對上述問題,提出了一種基于霍夫變換的可見光虹膜圖像定位算法。實驗結(jié)果表明,提出算法具有較高的定位準確度,并能較好地處理模糊、遮擋、低對比度及各種干擾的問題。
2 基本思路
從可見光外虹膜圖像與近紅外的差異出發(fā),分析可見光虹膜圖像定位的特點;從算法總體流程、虹膜外邊界定位、虹膜內(nèi)邊界(瞳孔)定位等方面闡述基本思路。
2.1 可見光與近紅外虹膜圖像的差異
可見光虹膜圖像與近紅外虹膜圖像比較而言存在顯著的差異。兩者的差異主要體現(xiàn)在兩個方面:
(1)與近紅外圖像相比,可見光圖像的外邊界更清晰。這是由于在可見光虹膜圖像中,虹膜的顏色、紋理信息豐富,虹膜與周圍的鞏膜顏色對比度大;而由于近紅外光可以透過虹膜區(qū)域中的色素,因此近紅外虹膜圖像中,虹膜與鞏膜的顏色對比度小[17]。
(2)與近紅外圖像相比,可見光圖像的內(nèi)邊界(瞳孔邊界)不清晰,并存在大量干擾因素,主要體現(xiàn)在以下幾方面:
①高光噪聲的干擾。在可見光虹膜圖像中,高光反射處的圖像亮度更高,對定位的干擾更明顯[3];且相對于近紅外虹膜圖像,可見光虹膜圖像中瞳孔區(qū)域的亮度不一致,在邊緣圖像中容易形成偽邊界干擾定位。
②虹膜紋理的干擾。由于可見光成像的虹膜的紋理顏色信息豐富,因此瞳孔區(qū)域的邊緣圖像中可能出現(xiàn)由虹膜紋理而形成的噪聲邊緣。
③眼瞼遮擋和睫毛的干擾。
由于上述干擾因素的存在,虹膜紋理、高光噪聲和眼瞼遮擋除了本身在瞳孔邊緣圖像中形成噪聲邊緣之外,還有可能因為虹膜紋理、高光噪聲較強從而在邊緣檢測中淹沒部分瞳孔邊緣信息,或者眼瞼遮擋嚴重時直接遮擋瞳孔邊界,這些都可能導致邊緣圖像中瞳孔邊界的缺失,對瞳孔定位造成嚴重影響。
因此,可見光虹膜圖像的瞳孔定位難度遠高于近紅外虹膜圖像。
2.2 虹膜邊界定位的策略
由于可見光與近紅外虹膜圖像的顯著差異,一般所采用的定位策略也有所區(qū)別。
在近紅外虹膜圖像的定位中,大多工作采用先定位內(nèi)邊界、再定位外邊界的順序。而可見光虹膜圖像的定位中,則有許多采用先定位虹膜外邊界、再定位內(nèi)邊界的順序,并且其中有許多工作具有較高的準確度[8,12-13]。
但先定位虹膜外邊界的方法也存在一定難度。一方面,對于采用傳統(tǒng)的方法如霍夫變換而言,外邊界定位所需要的時間復雜度遠大于內(nèi)邊界定位。另一方面,基于霍夫變換的虹膜邊界定位中的關(guān)鍵步驟是獲得二值化的虹膜邊緣圖像。而由于虹膜圖像中通常存在諸如眼瞼、睫毛、虹膜紋理等噪聲,嚴重影響了霍夫變換的準確度。有些基于霍夫變換的方法[12-13]為了減少干擾,在計算虹膜邊緣圖像時,會降低水平方向的邊緣權(quán)重。但對于非理想虹膜圖像,由于眼瞼遮擋嚴重或者傾斜角度嚴重,忽略水平方向的邊緣也會帶來虹膜邊緣信息損失過大從而引起定位準確度顯著降低的副作用。
針對上述問題,采用如下方法:
(1)算法總體流程:采取先定位虹膜外邊界、再定位內(nèi)邊界的順序,以盡可能地提高外邊界定位準確度,再在此基礎(chǔ)上,借助瞳孔和虹膜近似為同心圓的位置關(guān)系指導虹膜內(nèi)邊界定位。
(2)虹膜外邊界定位:針對外邊界定位中時間復雜度高和存在遮擋與干擾等問題,在外邊界定位中,利用可見光虹膜圖像顏色分布的先驗,進行邊緣檢測與篩選,以提高霍夫變換的速度與準確度。
(3)虹膜內(nèi)邊界(瞳孔)定位方面,采用以下措施減少干擾:
首先,借助瞳孔和虹膜近似為同心圓的位置關(guān)系以及瞳孔和虹膜半徑的長度關(guān)系,截取瞳孔區(qū)域,以提高霍夫變換的定位速度。
針對虹膜圖像的高光反射噪聲,提出了相應的高光噪聲檢測與去除方法,利用高光定位的信息對邊緣圖像中的噪聲邊緣進行排除,尤其排除那些對于后續(xù)霍夫變換干擾最大的連續(xù)噪聲邊緣。
針對其他幾類干擾因素如虹膜紋理、眼瞼遮擋,采用基于距離約束的霍夫變換,排除瞳孔周圍的噪聲影響,同時減少計算時間。
3 虹膜外邊界定位
3.1 邊緣檢測與篩選
針對外邊界定位中時間復雜度高和存在遮擋與干擾等問題,利用可見光虹膜圖像顏色分布的先驗對于邊緣檢測的結(jié)果進行篩選,見圖1。
由于皮膚、鞏膜區(qū)域相對于虹膜、瞳孔、睫毛、眉毛區(qū)域,兩者的顏色分布特點有顯著區(qū)別,這種區(qū)別在紅色通道的虹膜圖像上表現(xiàn)尤其顯著[12]。因此,首先利用OTSU算法[18]對紅色通道的虹膜圖像(如圖1(a)所示)進行二值化處理,可以將虹膜圖像清晰地分為兩類區(qū)域,如圖1(c)。圖1(c)顯示,皮膚、鞏膜區(qū)域被分為前景,包括虹膜、瞳孔、睫毛和眉毛在內(nèi)的所有區(qū)域都被視為背景;此外,存在的部分噪聲,即虹膜和瞳孔區(qū)域內(nèi)的高光也被分為前景。
在OTSU算法的基礎(chǔ)上,將圖像取反并刪去細小的連通區(qū)域(噪聲和高光),即可得到虹膜(與睫毛)所構(gòu)成的連通區(qū)域,如圖1(d)所示。此時,前景對象主要由虹膜區(qū)域構(gòu)成,并且由于虹膜和鞏膜的顏色存在顯著差異,可以確保前景對象的邊界恰好與虹膜邊界幾乎完全重合。對前景圖像獲取邊緣并且進行膨脹,得到具有一定寬度的邊緣輪廓,如圖1(e)所示。該邊緣輪廓確定覆蓋了真實虹膜邊界中的所有點,因此可以將該邊緣輪廓圖像作為掩碼來排除多余的邊緣信息。
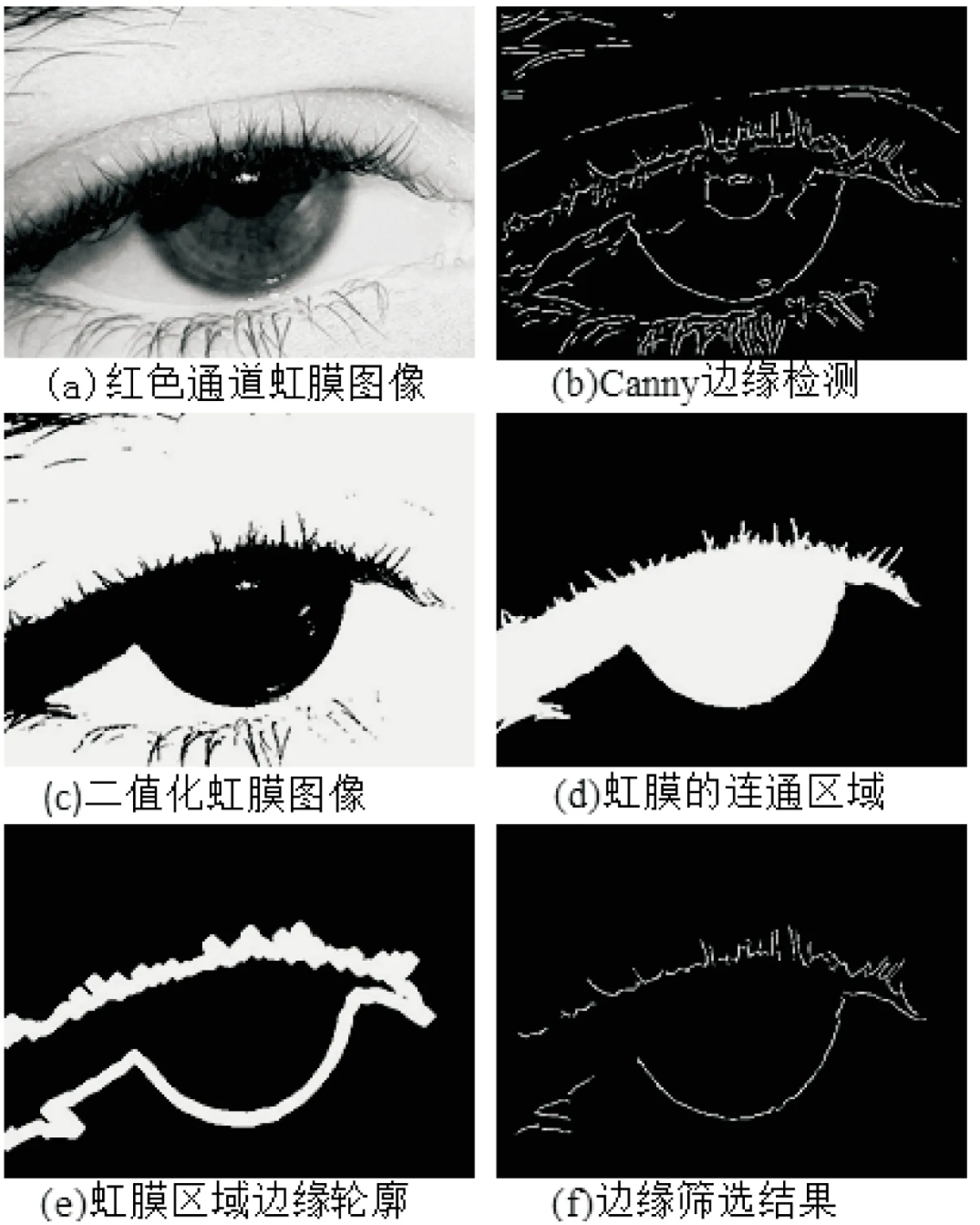
圖1 邊緣檢測與篩選過程
使用Canny邊緣檢測算法[18]得到原始虹膜圖像的邊緣信息。由于可以有效排除多余邊緣,因此在Canny邊緣檢測中對豎直和水平方向采用同等權(quán)重,即充分利用豎直和水平方向的邊緣信息,如圖1(b)所示。最后,將Canny邊緣檢測結(jié)果以邊緣輪廓圖像作為掩碼進行計算,得到篩選后的邊緣圖像,如圖1(f)所示,篩選后的邊緣圖像中包含了完整的虹膜邊緣,并且排除了絕大部分多余邊緣與噪聲,對于提高虹膜邊界定位的速度與準確度作用明顯。
3.2 虹膜外邊界的霍夫變換
使用霍夫變換實現(xiàn)對于虹膜外邊界的精確定位及獲得虹膜圓心和半徑的參數(shù)。針對圓形輪廓的霍夫變換,通過邊緣點對于所有可能的圓參數(shù)組(圓心坐標和半徑)進行投票的機制實現(xiàn)。其中,實現(xiàn)投票的累加器是一個三維數(shù)組:
因此,通過構(gòu)造三維累加器數(shù)組H,給定半徑r的取值范圍,取遍所有可能的圓參數(shù)(xc,yc,r),計算所有邊緣點(xj,yj)對每一組參數(shù)的投票值,并存儲于累加器數(shù)組H(xc,yc,r)。累加器H的最大投票對應的參數(shù)即為霍夫變換檢測得到的圓,圓心為(x0,y0),半徑為R,即滿足H(x0,y0,R)=max(∪H(xc,yc,r))。
虹膜外邊界定位結(jié)果如圖2所示。
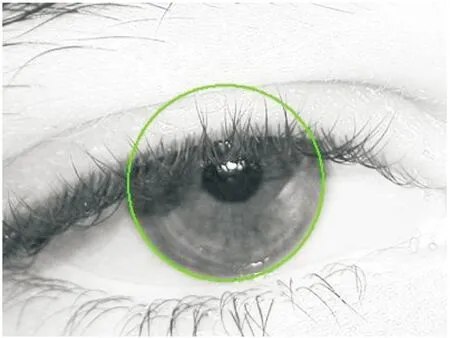
圖2 虹膜外邊界定位結(jié)果
4 虹膜內(nèi)邊界定位
4.1 高光噪聲檢測與去除
高光噪聲檢測與去除的輸入圖像是在虹膜圖像中截取的瞳孔區(qū)域。截取的瞳孔區(qū)域如圖3(a)所示,對瞳孔區(qū)域進行Canny邊緣檢測,可得到瞳孔區(qū)域的邊緣圖像Edge0(x,y),如圖3(b)所示。
為解決可見光虹膜圖像的高光反射噪聲,采用如下的高光檢測與去除方法來解決。具體步驟如下:
首先,通過設定閾值參數(shù)定位出高光區(qū)域,計算得二值化掩碼圖像Mask0(x,y):
其中,I(x,y)表示紅色通道的虹膜圖像在像素點(x,y)處的亮度值;threshold為判斷高光的閾值,取值為threshold=c×255,取c=0.7。
由于光虹膜圖像中瞳孔區(qū)域亮度變化范圍和幅度較大,因此難以保證檢測得到的高光區(qū)域邊界與瞳孔區(qū)域邊緣圖像中的噪聲邊緣完全一致。為保證高光區(qū)域檢測結(jié)果可以基本覆蓋邊緣圖像中的噪聲邊緣,再對高光區(qū)域Mask0(x,y)進行膨脹,得到膨脹后的掩碼圖像Mask(x,y)作為高光檢測的結(jié)果,如圖3(c)所示。
得到高光檢測的掩碼圖像Mask(x,y)之后,直接在瞳孔區(qū)域的邊緣圖像Edge0(x,y)中減去高光檢測的結(jié)果Mask(x,y),即可得到去除高光后的瞳孔區(qū)域的邊緣圖像Edge(x,y),如圖3(d)所示。

圖3 高光噪聲檢測與去除
通過實驗分析,高光檢測的閾值參數(shù)設置中,c∈[0.5,0.8]的參數(shù)取值以及不同的膨脹算子都可以得到較好的實驗效果。這是由于高光檢測與去除方法的主要目標不是要完全精確地對高光進行定位和平滑,而是利用高光定位的信息對邊緣圖像中的噪聲邊緣進行排除,尤其排除那些對于后續(xù)霍夫變換干擾最大的連續(xù)噪聲邊緣。
4.2 距離約束的霍夫變換
在完成瞳孔邊緣圖像的高光檢測與去除后,得到的邊緣圖像Edge(x,y)(見圖3(d))即為霍夫變換的輸入圖像。采用基于距離約束的霍夫變換,在進行基于霍夫變換的瞳孔邊界定位時,限定那些與虹膜圓心距離在預設閾值內(nèi)的邊緣點參與投票,從而排除瞳孔周圍的噪聲影響,同時減少計算時間。
距離約束的霍夫變換與原始的霍夫變換基本相似,不同之處主要體現(xiàn)在以下幾方面:
(1)投票累加器H2(xc,yc,r)的定義中:

不僅如此,由于已知虹膜外邊界的半徑rI,還可利用瞳孔和虹膜半徑長度關(guān)系的先驗,指定瞳孔與虹膜半徑比例的最大值為α、最小值為β;虹膜圖像中瞳孔半徑的最大估計值rpmax=α×r1;虹膜圖像中瞳孔半徑的最小估計值rpmin=β×rI;瞳孔圓心與虹膜圓心距離的最大估計值Δl=γ×rI。
(2)判斷是否投票的表達式不再是h1,而是:
通過構(gòu)造一個三維數(shù)組H2,取遍所有滿足上述約束條件的圓參數(shù)(xc,yc,r),計算得到所有邊緣點(xi,yi)對該參數(shù)組的投票值H2(xc,yc,r)。最大投票值對應的參數(shù)(xc,yc,r)即為霍夫變換檢測得到的圓。
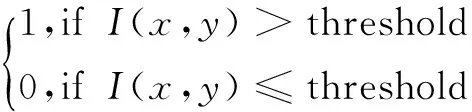
虹膜內(nèi)邊界定位結(jié)果如圖4所示。
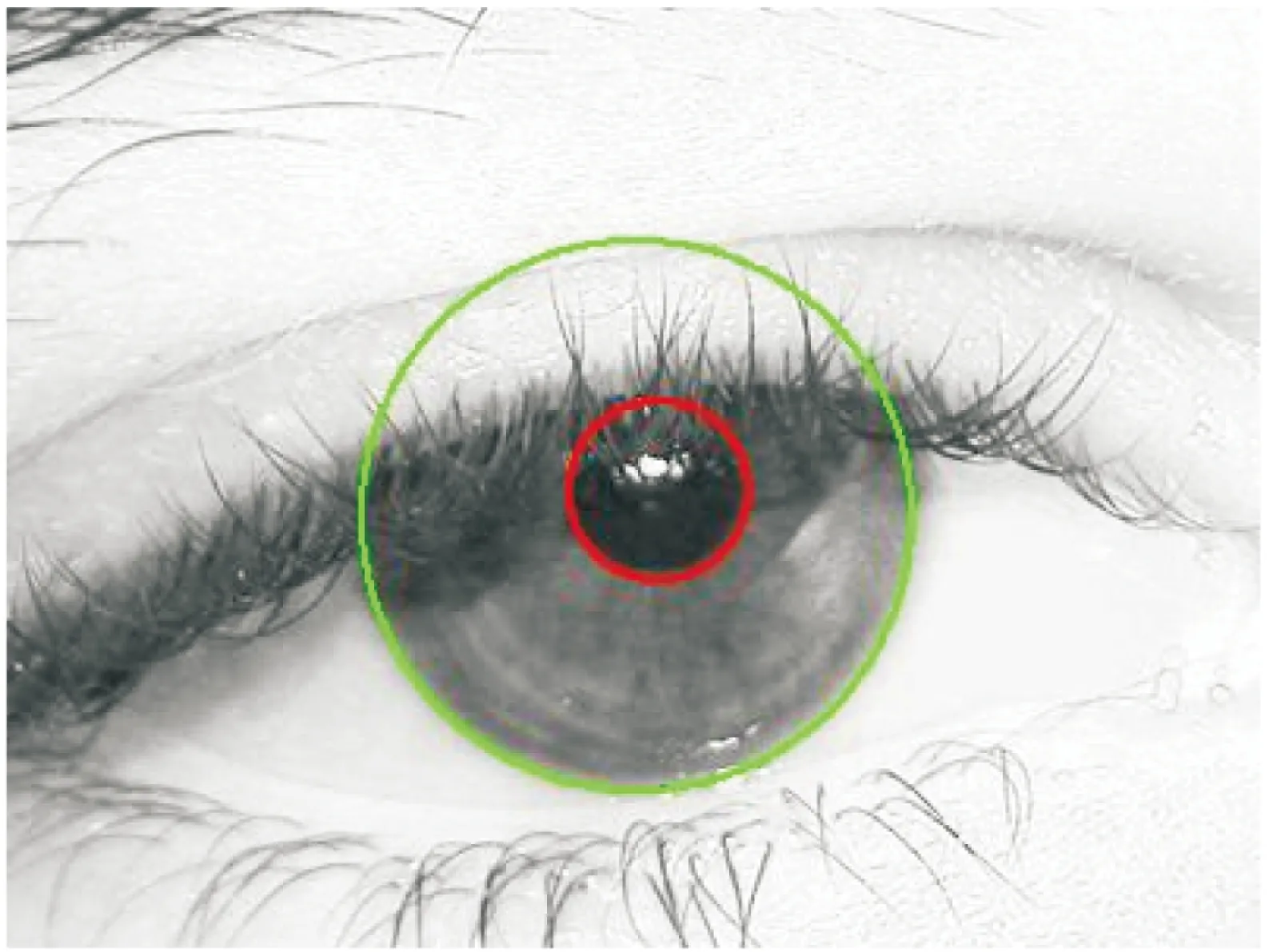
圖4 虹膜內(nèi)邊界定位結(jié)果
5 實驗設計與分析
虹膜定位算法在Matlab2010環(huán)境下編程實現(xiàn),并在公共的可見光虹膜數(shù)據(jù)集UBIRISv1.0[4]上測試定位準確度。UBIRISv1.0是可見光虹膜識別領(lǐng)域一個普遍使用的公開數(shù)據(jù)集,其中具有各種非約束條件下可見光成像的虹膜圖像,包括如模糊、高光、遮擋等干擾下的虹膜圖像,能較好地檢驗虹膜定位算法的準確性和魯棒性。文獻[5,8]分別給出了其算法的定位準確度數(shù)據(jù),直接從文獻中獲取定位準確度數(shù)據(jù)進行比較。為保證比較條件的一致,采取與文獻[5]相同的數(shù)據(jù)設置,在UBIRISv1.0session1的數(shù)據(jù)上統(tǒng)計虹膜定位準確度。而文獻[8]中,給出的是虹膜內(nèi)外邊界各自的定位準確度,并且測試數(shù)據(jù)是在UBIRISv1.0session1的數(shù)據(jù)中剔除了12張圖像質(zhì)量極差的虹膜圖像之后統(tǒng)計的,為進行相同條件的比較,也給出虹膜內(nèi)外邊界各自的定位準確度,并且當且僅當計算虹膜內(nèi)外邊界各自的定位準確度時,用同樣的標準剔除12張虹膜圖像之后進行統(tǒng)計。文獻[5,8]與所提算法的定位準確度數(shù)據(jù)見表1(*表示統(tǒng)計數(shù)據(jù)是基于剔除了12張虹膜圖像之后的數(shù)據(jù)進行統(tǒng)計得到的)。
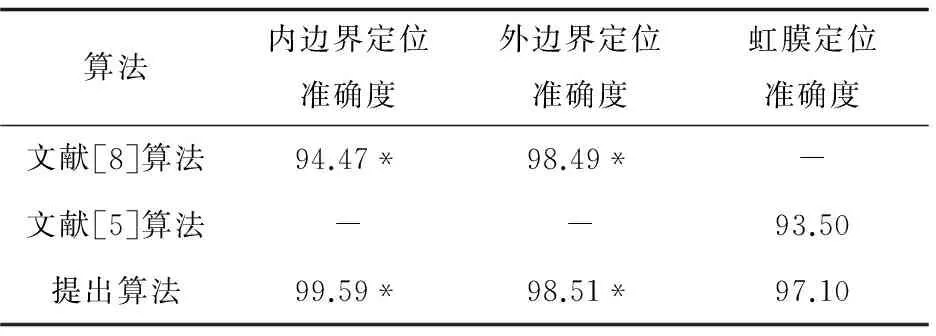
表1 虹膜邊界定位準確度比較 %
圖5為該算法得到的虹膜圖像定位結(jié)果。
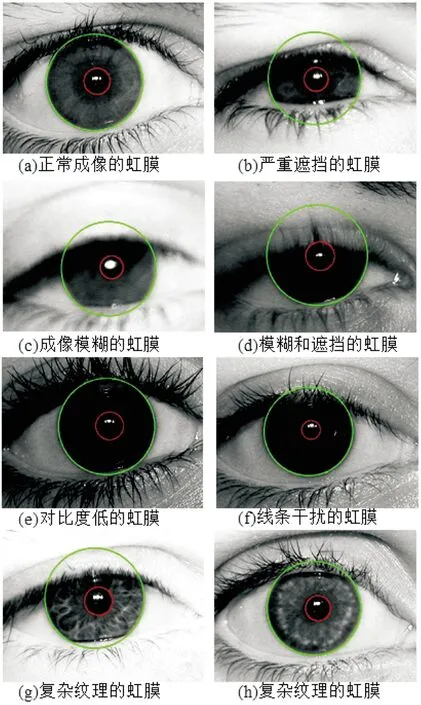
圖5 虹膜邊界定位結(jié)果
從圖中可見,所提算法可以準確定位各類不同成像條件的可見光虹膜圖像。
6 結(jié)束語
針對外邊界定位存在的問題,在研究現(xiàn)有可見光虹膜圖像定位算法的基礎(chǔ)上,提出了一種魯棒的基于霍夫變換的可見光虹膜圖像定位算法。按照先定位虹膜外邊界、再定位內(nèi)邊界的順序,利用可見光虹膜圖像顏色分布先驗,進行邊緣檢測與篩選,提高了定位速度與準確度;在此基礎(chǔ)上,借助瞳孔和虹膜近似為同心圓的位置關(guān)系指導虹膜內(nèi)邊界定位,進行高光噪聲檢測與去除,并采用基于距離約束的霍夫變換,排除噪聲影響并減少計算時間。
實驗結(jié)果表明,所提算法相對于傳統(tǒng)算法具有更高的定位準確度。并且在諸如嚴重遮擋、成像模糊、區(qū)域?qū)Ρ榷鹊秃缒ぜy理與隱形眼鏡等干擾的情況下也具有較好的定位結(jié)果。但該算法的缺陷是時間復雜度在同類算法中不具有優(yōu)勢。
[1]DaugmanJG.Highconfidencevisualrecognitionofpersonsbyatestofstatisticalindependence[J].IEEETransactionsonPatternAnalysisandMachineIntelligence,1993,15(11):1148-1161.
[2]WildesRP.Irisrecognition:anemergingbiometrictechnology[J].ProceedingsoftheIEEE,1997,85(9):1348-1363.
[3]JanF,UsmanI.Irissegmentationforvisiblewavelengthandnearinfraredeyeimages[J].InternationalJournalforLightandElectronOptics,2014,125(16):4274-4282.
[4]Proen?aH,AlexandreLA.UBIRIS:anoisyirisimagedatabase[C]//Internationalconferenceonimageanalysisandprocessing.Berlin:Springer,2005:970-977.
[5]JanF,UsmanI,AghaS.Irislocalizationinfrontaleyeimagesforlessconstrainedirisrecognitionsystems[J].DigitalSignalProcessing,2012,22(6):971-986.
[6]HajariK,BhoyarK.Areviewofissuesandchallengesindesigningirisrecognitionsystemsfornoisyimagingenvironment[C]//Internationalconferenceonpervasivecomputing.[s.l.]:IEEE,2015:1-6.
[7]RaffeiAFM,AsmuniH,HassanR,etal.Alowlightingorcontrastratiovisibleirisrecognitionusingiso-contrastlimitedadaptivehistogramequalization[J].Knowledge-BasedSystems,2015,74:40-48.
[8]PuhanNB,SudhaN,KaushalramAS.EfficientsegmentationtechniquefornoisyfrontalviewirisimagesusingFourierspectraldensity[J].Signal,ImageandVideoProcessing,2011,5(1):105-119.
[9]RadmanA,JumariK,ZainalN.Irissegmentationinvisiblewavelengthenvironment[J].ProcediaEngineering,2012,41(3):743-748.
[10]KhalighiS,PakF,TirdadP,etal.Irisrecognitionusingrobustlocalizationandnonsubsampledcontourletbasedfeatures[J].JournalofSignalProcessingSystems,2015,81(1):111-128.
[11]FrucciM,NappiM,RiccioD,etal.Usingthewatershedtransformforirisdetection[C]//Internationalconferenceonimageanalysisandprocessing.Berlin:Springer,2013:269-278.
[12]SahmoudSA,AbuhaibaIS.Efficientirissegmentationmethodinunconstrainedenvironments[J].PatternRecognition,2013,46(12):3174-3185.
[13]KaurN,JunejaM.Segmentationapproachforirisrecognitioninlessconstrainedenvironment[M]//Computationaladvancementincommunicationcircuitsandsystems.[s.l.]:[s.n.],2015:481-490.
[14] 吳國龍,陸 軍.非理想成像條件下的虹膜定位方法[J].計算機工程與設計,2014,35(11):3883-3887.
[15] 萬洪林,韓 民.基于Hough變換與圖像灰度增強的非理想虹膜邊界檢測[J].首都師范大學學報:自然科學版,2014,35(3):18-24.
[16] 苑瑋琦,王 浩.一種基于橢圓投影的非理想虹膜定位算法[J].電子學報,2011,39(4):958-962.
[17]ProencaH.Irisrecognition:onthesegmentationofdegradedimagesacquiredinthevisiblewavelength[J].IEEETransactionsonPatternAnalysisandMachineIntelligence,2010,32(8):1502-1516.
[18]GonzalezRC,WoodsRE.Digitalimageprocessing[M].[s.l.]:Addison-WesleyLongmanPublishingCo.,Inc.,2001.
Iris Localization for Visible-light Images Based on Hough Transform
MU Jun1,YAN Jun-feng1,PENG Qing-hua1,FEI Hong-xiao2
(1.Collaboration and Innovation Center for Digital Chinese Medicine in Hunan,Hunan University ofChinese Medicine,Changsha 410208,China;2.School of Software,Central South University,Changsha 410075,China)
As a crucial step in iris recognition,the iris localization algorithms,especially those dealing with iris images taken in visible-light under non-ideal imaging conditions have
increasing attention recently.A localization algorithm for visible-light iris images has been proposed to enhance the accuracy of iris localization.The strategy of localizing limbic boundary has been determined which is carried out from out boundary to inner verge of iris to promote the accuracy of boundary location.To solve the problem in localizing limbic boundary,the prior of color distribution has been utilized to remove the noise in the edge map of the iris image for increase of the accuracy and speed of limbic boundary localization.Therefore,the relevance between center positions of iris and pupil has been utilized to instruct the pupil boundary localization and the reflections in pupil region have been detected and removed with Hough transform on distance limitation to eliminate the noise effects and to reduce computation time via estimation of the pupil radius and center.Experimental results demonstrate that the localization accuracy of the proposed method is higher than traditional methods and has more capabilities such as dealing with iris images with occlusion,blur imaging,low contrast and interfering texture.
iris localization;visible-light iris images;prior of color distribution;Hough transform
2016-06-02
2016-09-08 網(wǎng)絡出版時間:2017-03-13
國家中醫(yī)藥管理局中醫(yī)藥信息學重點學科建設項目;國家中醫(yī)藥管理局中醫(yī)眼科學重點學科建設項目;國家重點學科中醫(yī)診斷學開放基金(2013ZYZD08);2013年湖南省高校創(chuàng)新平臺開放基金(13K076)
穆 珺(1983-),女,碩士,助教,研究方向為圖像處理;晏峻峰,博士,教授,通訊作者,研究方向為中醫(yī)藥信息學;彭清華,博士,教授,研究方向為中醫(yī)眼科學;費洪曉,碩士,副教授,研究方向為計算機應用。
http://kns.cnki.net/kcms/detail/61.1450.TP.20170313.1547.072.html
TP301.6
A
1673-629X(2017)05-0040-06
10.3969/j.issn.1673-629X.2017.05.009