二自由度牽引裝置在軌道運行中的應用
2017-06-05 15:09:19邱雷
中國設備工程 2017年10期
邱雷
(山東康威通信技術(shù)股份有限公司 山東 濟南 250101)
二自由度牽引裝置在軌道運行中的應用
邱雷
(山東康威通信技術(shù)股份有限公司 山東 濟南 250101)
對隧道內(nèi)軌道上吊掛的巡檢設備在通過彎道時可能出現(xiàn)的車身與軌道之間的干涉進行了分析,包括水平彎道和坡道提出了二自由度牽引裝置的結(jié)構(gòu)方案,并對車身的前后輪組在彎道上的情況分別進行了分析,提出了輪組轉(zhuǎn)軸相對于車身轉(zhuǎn)向角度在兩種自由度下的運算方法,對車身能滿足的彎道最小半徑進行求解。
軌道交通;二自由度;牽引裝置
軌道交通設備,尤其對于隧道或管廊內(nèi)的巡檢設備,因隧道內(nèi)空間狹窄彎曲,巡檢設備在行駛過程中會不可避免的遇到彎道問題,一般隧道或管廊的水平方向的彎道半徑變化較大,有的值在幾米之間,甚至有直角彎,這種情況就取決于隧道的寬度,如隧道是2米寬度,則其中心線對應的轉(zhuǎn)彎半徑就只有1米。巡檢設備的軌道,其一般是安裝在隧道中心線位置,則軌道彎道的極限半徑就只能是1米,這對于在其上運行的設備而言是一個很大的挑戰(zhàn)。因為凡是巡檢設備的車體結(jié)構(gòu),都是具備前輪及后輪的,必然會存在前后輪距,當經(jīng)過彎道時,前后輪距就會形成弧形彎道上一根弦,弦的中心與其所對應的圓弧中心就會產(chǎn)生一段間距,這個間距K就是車體中心在彎道上的橫向偏移,當這個橫向偏移過大時,那么車體結(jié)構(gòu)就很可能與軌道發(fā)生干涉,因為在平直軌道上行駛的車體結(jié)構(gòu)件相對應軌道是存在一定距離的,當行至彎道時,由于橫向偏移距離K的存在,當K過大時,超過了車體結(jié)構(gòu)件與導軌的間距H時,兩者之間就會發(fā)生干涉,導致車體不能在此彎道上通過。可以改變設計,使車體結(jié)構(gòu)件與導軌間距K足夠大,二者不至于形成干涉,但導軌寬度是固定的,車輪作為車體結(jié)構(gòu)件的一部分,必然要在導軌的承載面運動,當導軌彎道R過小,前后輪距L過大時,由于間距K的影響,車輪會非常有可能偏離承載面,造成車體脫軌,甚至會導致嚴重事故。
同樣因為隧道通常會有落差,尤其在隧道銜接處會有工作井的出現(xiàn),使得隧道通過工作井或落差大的隧道時也不可避免的出現(xiàn)軌道的坡道,當坡道過于陡峭時,不僅考驗車體的驅(qū)動力,也挑戰(zhàn)了車體的通過性能,因為同樣安裝于車體的結(jié)構(gòu)件會與導軌承載面發(fā)生干涉,尤其是對于車體經(jīng)過坡道結(jié)束時的拐點時,如果車體的輪式結(jié)構(gòu)之間連接為剛性結(jié)構(gòu)連接時,由于車體重心尚未經(jīng)過拐點,則后輪與重心的作用,往往會使前輪翹起,并對導軌的承載面上施壓,如果這時前輪不是驅(qū)動輪,影響不是太大,后輪的驅(qū)動力會使車體重心通過拐點,前輪會因重力作用落在導軌支撐面上,如果這時前輪是驅(qū)動輪,那么前輪的驅(qū)動就會形同虛設,造成動力不足,如果前輪是車體唯一的驅(qū)動輪,那么車體在經(jīng)過此拐點時不僅不會前進,車體還會因為沒有動力而卡死,或者倒退。
另一種情況就是車體在行進過程中,車輪在經(jīng)過坡道時如果不間斷與導軌觸碰或分離,必然會對車身形成顛簸,這對于車身裝載的設備也會產(chǎn)生 不利影響,例如車載攝像機的晃動會影響視頻質(zhì)量。所以在彎道半徑過小的情況下,如何提高車體在彎道上通過性能成為關(guān)鍵需要解決的問題。
本文提出一種讓車體通過小彎道的解決方案,并對車體在行駛過程中遇到彎道時,進行簡要的分析和論述。
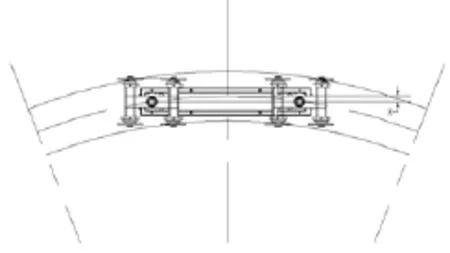
圖1
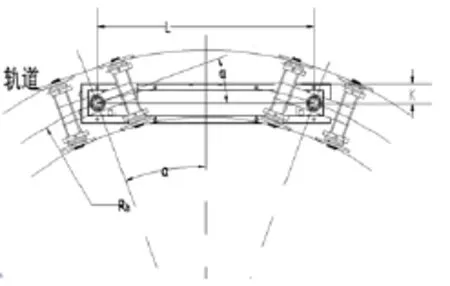
圖2
如果我們將圖1中的前后輪組在車架上的固定安裝變換為圖2中的形式,即前后輪組都可以在車架的裝配中心為軸旋轉(zhuǎn),這種旋轉(zhuǎn)角度在車架導向輪的作用下完全可以跟隨軌道的走向而變,理論上兩組前后輪組的中心線延長線的相交點便為彎道的圓心,此時前后輪組都會在彎軌的切線方向上進行滾動,這樣就不會與彎軌發(fā)生干涉,而車架可以懸掛于前后輪組的下方,也等于說處于軌道的下方,那么對于前后輪組的中心距L而言,仍然可以保持不變,也可以說仍然保持了車身的剛性,前后輪組各自旋轉(zhuǎn)并不影響車身內(nèi)各種結(jié)構(gòu)件的位置,而前后輪組卻能以無干涉的狀態(tài)通過軌道,能影響其不能通過的原因只有一點,那就是每一個輪組內(nèi)部的前后輪距,對于一定半徑的彎軌道而言,輪距越小,偏移量跟隨其成正比,而這個前后輪距,相對于前后輪組之間距L而言,要小得多,這就能夠大大縮小車身通過軌道的半徑,提高了車身對隧道的適應性。
圖2中,α=車架中心線與輪組中心線的夾角;L=兩輪組間距;Rh=水平彎軌半徑;K=車體經(jīng)過彎道時與導軌中心線之間的理論偏移。
對于圖2中我們可以根據(jù)三角函數(shù)求出α的角度及間距K,來確定我們需要在設計車身結(jié)構(gòu)時,需要多大的角度,及車體結(jié)構(gòu)上相關(guān)結(jié)構(gòu)件相對于軌道做出多大的避讓。上式求解比較簡單,只要知道前后輪組間距L、軌道半徑即可。
對于車體經(jīng)過坡道時的情形,則與經(jīng)過水平彎道不同,因為水平彎道時左右對車體進行限位,而經(jīng)過坡道時,車體下方有導軌的支撐面,而車體上方是不存在限位的,所以不會發(fā)生像過水平彎道情況時的干涉,但存在一種情況是,當車身為剛性時,車輪在經(jīng)過坡道時,會因為坡道的影響,車體重心發(fā)生某個車輪翹起的情況, 當車體經(jīng)過坡道時,由于車身重心的存在,對于剛性固定的車輪,當重心與后輪尚未經(jīng)過軌道的拐點時,前輪組很容易翹起,如果前輪組為驅(qū)動輪,那么會導致該輪組的摩擦力喪失,導致動力不足,或者伴隨著車身前進,車輪離軌后又與軌面觸碰,而造成車體行進中產(chǎn)生顛簸,如圖,當車體經(jīng)過圓弧頂時,前后輪組可根據(jù)坡道的變化,在豎直平面內(nèi)自由轉(zhuǎn)動,就能避免出現(xiàn)某個輪組行進中翹起的現(xiàn)象,從而保證動力及足夠的摩擦力。同時,兩個輪組車輪都能同時接觸軌面,可避免車體在行進坡道上形成顛簸。
現(xiàn)將車體經(jīng)過坡道時的幾何關(guān)系說明如下:為了簡化計算,將前后輪組簡化成前后輪,之前圖示中前后輪組的旋轉(zhuǎn)中心軸即是圖3前后輪的中心軸,當車體前輪處于圖示中的拱形坡道時,根據(jù)三角函數(shù),圖示角度Β有如下計算關(guān)系。
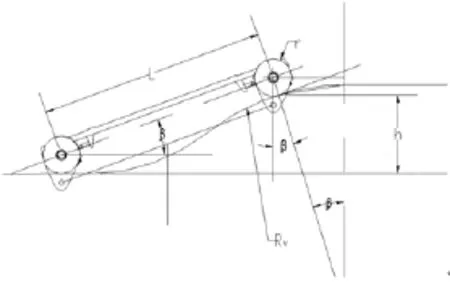
圖3
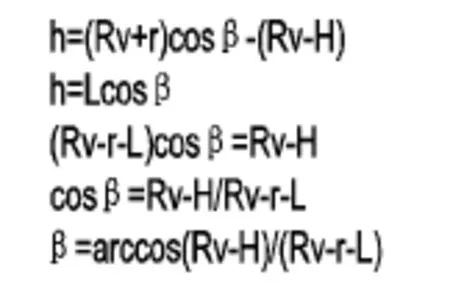
上式中,L=輪組間距;Rv=圓拱導軌半徑;r=車輪半徑;h=拱形導軌高度;β=車身在坡道上時與水平方向夾角。
這樣可以在設計車身結(jié)構(gòu)時,得出相關(guān)結(jié)構(gòu)件相對于軌道做出多大的避讓。如式中所述,只要知道拱形坡道的半徑,前后輪距及車輪半徑即可求得該角度,或者可以根據(jù)車身結(jié)構(gòu)所能接受的最大限度的轉(zhuǎn)向角度,來反求我們需要設計的坡道半徑。
以上的計算方法和分析思路在實際工作是可行的,但是比較理想化的情況,在彎道上通過性的評價方法,沒有考慮側(cè)滑對軌道設備對彎道通過性的影響,在實際評價和制定方案時,應考慮一定裕度。以上的計算方法和分析思路是在理想二維平面內(nèi)進行。在評價軌道設備在水平彎道通過性時,還應考慮在水平彎度變化的同時存在不存在坡道彎度的變化,當過水平彎道時前后輪組在豎直方向上的擺動角度有可能會造成兩個自由度均存在變化。這種影響主要表現(xiàn)在前后輪組與車架之間存在的兩個自由度聯(lián)動時的干涉。在實際工作中往往是對隧道巡檢設備在一段道路的通過性進行評價,因此首先是采用簡單的測量工具方法進行初評,然后是采用準確的CAD制圖模擬方法進行重點評價,最后是采用三維建模方法進行全面評價和驗證,這樣的評價方法既有重點又全面。優(yōu)點是克服了隧道交通用設備在隧道內(nèi)拐彎半徑受限的問題,以及行進中遇到坡道驅(qū)動輪與導軌承載面不能充分接觸的問題,拱形頂部車輪與承載面也能夠做到緊密的接觸,這對于保證隧道巡檢機器人在軌道的穩(wěn)定進行有著重要意義。
[1] 余志生.汽車理論[M].清華大學 .
[2]吉樹祥.半掛汽車列車最小轉(zhuǎn)彎直徑計算與分析[J].江蘇交通科技.
[3]胡鋼.半掛汽車列車轉(zhuǎn)向分析[J].專用汽車.
TD524
:A
:1671-0711(2017)05(下)-0093-02
