監測接收機性能指標體系研究
2017-06-05 09:35:34劉魁星高帥顧青濤
全球定位系統 2017年2期
劉魁星,高帥,顧青濤
(北京衛星導航中心,北京100094)
?
監測接收機性能指標體系研究
劉魁星,高帥,顧青濤
(北京衛星導航中心,北京100094)
本文從衛星導航系統地面段的需求出發,建立了監測接收機完備的指標體系,結合性能指標測試方法給出了性能指標的定義和數據處理方法,使用該指標體系和測試方法對監測接收機進行了測試,測試結果表明,測試方法可行,指標體系完備。
監測接收機;指標體系;測試
0 引 言
監測接收機是衛星導航系統中關鍵地面設備,分布在衛星導航系統服務區域內。其作為高精度的測量設備,對空間導航衛星信號進行觀測,獲取高精度偽距、載波相位、多普勒觀測量和導航電文等業務信息,為衛星導航系統地面段完成精密定軌、電離層修正及預報處理、系統完好性監測和系統運行管理等任務提供支撐[1-2]。可以說,監測接收機性能的優劣決定了衛星導航系統的服務性能。如何對監測接收機性能進行測試評估,目前仍沒有形成行業標準,部分文章僅對部分指標進行了分析,是否全面仍存在一定疑問,且大部分是針對用戶接收機而言,針對地面段監測接收機性能指標的研究較少[3-4]。本文從衛星導航系統業務需求出發,全面分析了監測接收機的關鍵技術指標,建立了完備的指標體系,并對關鍵技術指標提出了測試方法。最后,根據設計的性能指標和測試方法對某型監測接收機進行了測試。
1 監測接收機指標體系設計
1.1 衛星導航系統對監測接收機需求分析
監測接收機的核心用戶是衛星導航系統地面段的數據處理中心,由數據處理中心根據各監測接收機觀測數據完成定軌、電離層修正等任務。為數據處理中心提供穩定高精度的觀測數據,是監測接收機的核心作用。因此,對監測接收機性能的測試評估指標都需要圍繞該作用設計。
為達到提供穩定高精度的觀測數據目標,對于監測接收機應從以下幾個方面考慮設計監測接收機評估指標:觀測數據的高精度;觀測數據的穩定性;觀測數據時間基準的正確性;盡可能多的獲取觀測數據;導航電文正確解調。
從以上角度,才能全面衡量監測接收機為地面段的數據處理中心提供穩定高精度的觀測數據的能力。
1.2 監測接收機指標設計
從以上分析可知,對于監測接收機性能評估指標,可以分為5大類。
1) 高精度觀測數據指標
監測接收機的主要產品為偽距、載波相位、多普勒觀測量。高精度的導航業務處理,離不開監測接收機高精度的測量結果,需要針對監測接收機的測距產品進行指標設計。根據監測接收機提供的產品可設計偽距測量誤差、載波相位測量誤差、多普勒測量誤差三個指標分別衡量。
2) 觀測數據穩定度指標
觀測數據的穩定性表現在監測接收機各通道觀測數據不因其開關機和運行時間長短而存在不可消除的偏差。因此可設計開關機穩定性、通道時延穩定性和通道時延一致性三個指標衡量。開關機穩定性描述了監測接收機在開關機后,由開關機帶來的觀測值變化程度;通道時延穩定性描述了監測接收機運行一定時間后,觀測值變化的程度;通道時延一致性描述了監測接收機不同的信號接收通道時延的一致性。
3) 觀測數據時間基準指標
觀測數據時間基準的正確性包含兩個方面:觀測時刻的準確性和與外部時頻系統保持一致的能力。觀測時刻的準確性即測量值時標的正確性。為了與精確的時間測量相適應,測量值必須給出對應的準確測量時間[5]。監測接收機需要與外部時頻系統時標保持一致,因此需要具備與外部時頻系統保持一致的能力。可設計測量時刻準確度和外輸入1 pps模式鐘面校時精度兩個指標評估觀測數據時間基準的正確性。
4) 捕獲性能指標
為獲取盡可能多的觀測數據,監測接收機應能接收一定功率范圍內的導航信號,在開機或者失鎖后能盡快鎖定可見衛星信號,以滿足獲得盡可能多的觀測數據要求。可設計最低信號功率、接收信號動態范圍、開機捕獲時間、失鎖重捕時間四個指標。最低信號功率指監測接收機能夠接收的最小信號功率。接收信號動態范圍指在指定信號電平下均可完成信號捕獲和鎖定。開機捕獲時間指監測接收機在開機后到所有衛星所有頻點和支路完全鎖定所需時間。失鎖重捕時間指在信號中斷到信號恢復后,監測接收機重新捕獲所需時間。其中信號捕獲是指對接收信號完成載波環鎖定、碼環鎖定、比特信息位鎖定和幀標志鎖定。
5) 導航電文指標
監測接收機應能按照空間接口規范解析導航電文,完成衛星導航電文的正確回收,用以驗證地面段上行注入導航電文的正確性。因此可設計導航電文誤碼率指標,用以評估監測接收機在最小信號功率下解析導航電文的能力。
2 監測接收機指標測試與數據處理方法
2.1 模擬信號源法
從以上指標定義方法看,模擬信號源法[6]為最簡單方便的測試方法。按照圖1連接設備,導航信號模擬源根據測試需求輸出仿真射頻導航信號并通過有線方式連接傳輸給監測接收機低噪放,監測接收機接收仿真信號,完成信號捕獲和持續跟蹤并輸出觀測數據。
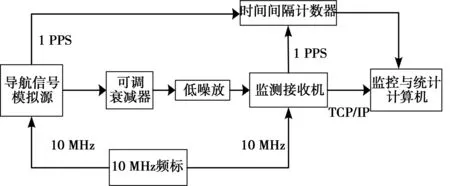
圖1 模擬信號源法測試設備連接圖
2.2 觀測數據測量誤差處理方法

(1)
式中,σρ即為監測接收機的偽距測量誤差,n為偽距測試數據的個數。多普勒測量誤差計算方法同偽距測量誤差方法。
由于接收機載波相位觀測值存在整周數,無法給出載波相位相對應的絕對距離,因此采用如下計算方法得出載波相位的測量誤差。在最低信號功率電平下,監測接收機測得的載波相位測量數據為Ci,對載波相位測量值進行歷元間三次做差,如下式所示:
(2)
ΔC?i=C″i-C″i-1.

2.3 觀測數據穩定度處理方法
1) 開關機穩定性

(3)
2) 通道時延穩定性
按照圖1連接測試設備,監測接收機持續一定時間接收模擬信號源仿真信號。ρk表示監測接收機機k通道偽距測量值,ρref表示選定的參考通道。定義ΔDk表示監測接收機對仿真衛星各信號接收通道偽距測量值與參考通道偽距測量值差值的均值,即
ΔDk=E(ρk-ρref) .
(4)
(5)
式中,ΔDtime即為監測接收機通道時延穩定性。其中一定時間可選短期2至3 h和長期24 h.
3) 通道時延一致性
監測接收機通道可以劃分為三個層次,通道、頻點和支路,其層次邏輯關系圖如圖2所示,其中,同一通道,同一頻點,不同支路時延差異可定義為ICB″;同一頻點,同一支路,不同通道時延差異可定義為ICB′;同一通道,同一支路,不同頻點時延差異可定義為IFB.
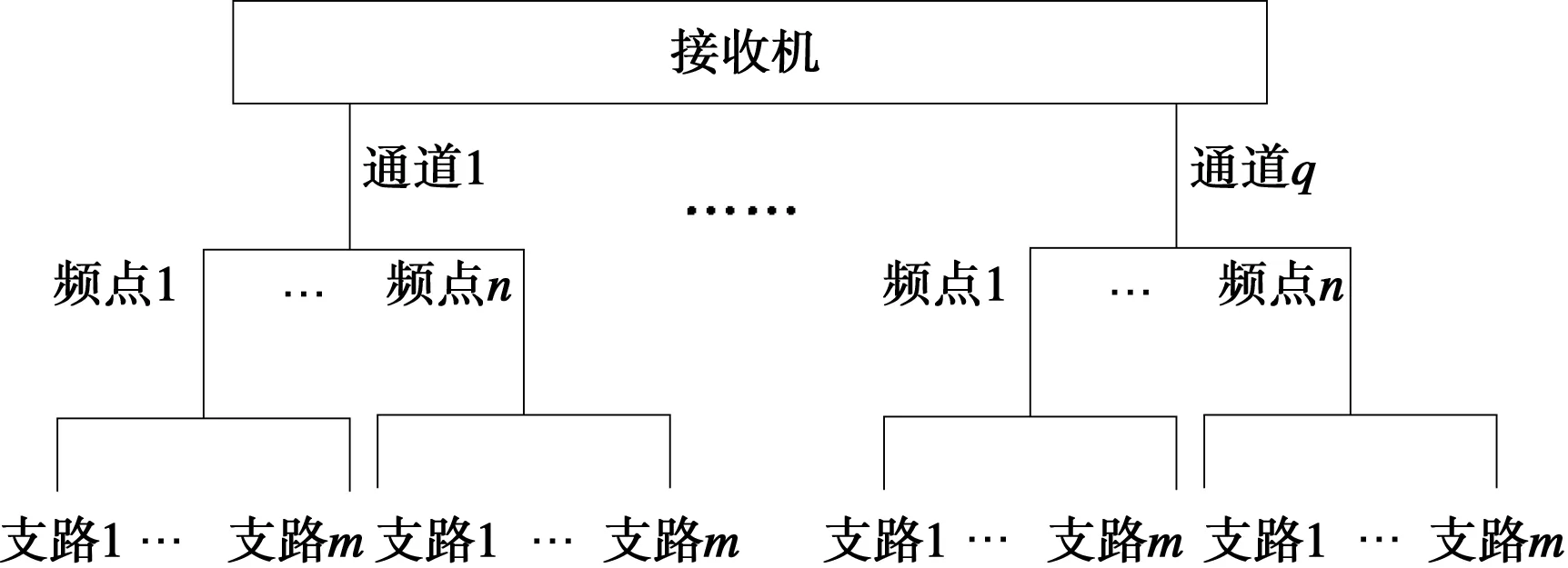
圖2 監測接收機通道頻點支路層次關系圖

(6)
則同頻通道時延穩定性ICB′和ICB″指標可定義為


(7)
異頻通道時延穩定性指標IFB定義為

(8)
2.4 觀測數據時間基準指標處理方法
1) 觀測數據時刻準確性
按照圖1連接測試設備,監測接收機持續一定時間接收模擬信號源仿真信號。監測接收機偽距觀測值可表達為
(9)

2) 外輸入1 pps模式鐘面校時精度
按照圖1連接測試設備,模擬信號源輸出1 pps給監測接收機。監測接收機進行多次開關機,每次開機待接收機工作穩定并完成外部1 pps鐘面校時后,采集監測接收機偽距測量值Δρi,每組采集100個數據,取每組偽距測量值均值E(Δρi).
取多組偽距測量值均值E(Δρi)的標準差:

(10)
即外1pps鐘面校時精度。
2.5 捕獲性能和導航電文指標處理方法
捕獲性能四項指標最低信號功率、接收信號動態范圍、開機捕獲時間和失鎖重捕時間無需特別數據處理方法。所有測試均在最低信號功率下進行,即可保證最低信號功率指標。接收信號動態范圍可通過調整發射信號的功率大小,監測測接收機完成信號的捕獲和鎖定即可。開機捕獲時間、失鎖重捕時間采用實際場景計時即可。
導航電文誤碼率指標,可通過比較模擬信號源保存發播的導航電文和監測接收機接收解調電文計算獲得。
3 測試實例
3.1 測試對象
按照上述提出的指標設計及測試數據處理方法,對某研制廠家研制生產的BDS/GPS雙模監測接收機進行了測試。該型監測接收機是一種高精度的測量設備,可對視場內的北斗和GPS衛星信號同時觀測,獲取精密偽距、載波相位和導航電文等信息,為系統星地時間同步、精密定軌、電離層傳播延遲修正和完好性監測提供觀測數據。
3.2 測試結果
由于上述指標體系的測試結果龐大,限于篇幅無法一一列出,僅給出部分測試結果。表1、表2示出了該型監測接收機BDS和GPS部分頻點和支路的偽距測量精度測試結果。從偽距精度測試結果看,在模擬信號源測試條件下,監測接收機BDS和GPS偽距精度相當,部分頻點BDS偽距精度更高。通過本文所提監測接收機指標和測試方法,完成多個型號的監測接收機測試。監測接收機在使用中達到預期目的。
表1 監測接收機BDS偽距精度測試結果(單位m)

衛星號B1I(窄相關)B3I(窄相關)B1I(抗多徑)B3I(抗多徑)SV010.0460.0170.0560.029SV020.0670.0190.0770.029SV030.0660.0190.0640.030SV040.0410.0170.0580.030SV050.0420.0130.0580.027SV060.0180.0070.0480.026SV070.0240.0070.0490.026SV080.0240.0070.0520.027SV090.0250.0060.0460.027SV100.0170.0070.0500.026

表2 監測接收機GPS偽距精度測試結果(單位m)
4 結束語
本文從衛星導航系統對監測接收機的業務處理需求出發,分析了影響衛星導航系統性能的監測接收機關鍵指標,建立比較完備的指標體系,結合指標測試方法給出了指標的定義與數據處理方法。最后利用該套指標及測試方法對某型監測接收機進行了測試,給出了部分項目測試結果。目前,該測試指標體系已在監測接收機性能測試方面得到有效應用,所測試監測接收機運行穩定,發揮了預期作用。
[1] 譚述森.衛星定位工程[M].北京:電子工業出版社,2013.
[2] 謝鋼.GPS原理與接收機設計[M].北京:電子工業出版社,2012.
[3] 王博,李鋒等.北斗接收機主要指標測試方法與分析[J]. 導航定位學報, 2015,3(2): 19-23.
[4] 翟建勇,王黨衛,呂紅麗,等.高精度衛星導航接收機功能與性能指標分析[C]//第四屆中國衛星導航學術年會電子文集, 2013.
[5] 劉利.偽距測量中的時標偏差影響分析[J].時間頻率學報,2012, 35(2):105-111.
[6] 劉思睿.GNSS接收機性能綜合測試技術研究[D].北京:北京化工大學,2013.
The Research of Performance Index System for Monitoring Receiver
LIU Kuixing,GAO Shuai,GU Qingtao
(BeijingSatelliteNavigationCenter,Beijing100094,China)
According to the requirement of satellite navigation ground segment, this paper establishes the index system of monitoring receiver, and gives the definition of index and the way of data processing combining the test method of index. This paper analyses the examples that uses the index system and method for testing monitoring receiver. The test results show that this method is feasible and the index system is complete.
monitoring receiver; performance index system; testing
10.13442/j.gnss.1008-9268.2017.02.005
2016-12-20
P228.4
A
1008-9268(2017)02-0021-04
劉魁星 (1983-),男,安徽合肥人,碩士,工程師,主要研究方向為衛星導航工程。
高帥 (1982-),男,山東淄博人,碩士,工程師,主要研究方向為衛星導航工程。
顧青濤 (1980-),男,吉林松原人,本科,工程師,主要研究方向為衛星導航工程。
聯系人: 劉魁星 E-mail:hflkx@163.com
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中國生殖健康(2019年3期)2019-02-01 06:12:26
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
