改進(jìn)的CS-UKF加速度方差自適應(yīng)跟蹤算法
2017-05-24 14:45:32崔彥凱
計(jì)算機(jī)測(cè)量與控制 2017年5期
崔彥凱
(中國(guó)空空導(dǎo)彈研究院,河南 洛陽(yáng) 471000)
改進(jìn)的CS-UKF加速度方差自適應(yīng)跟蹤算法
崔彥凱
(中國(guó)空空導(dǎo)彈研究院,河南 洛陽(yáng) 471000)
針對(duì)基于當(dāng)前統(tǒng)計(jì)模型的狀態(tài)噪聲協(xié)方差陣中的加速度方差調(diào)整方法對(duì)一般機(jī)動(dòng)目標(biāo)、非機(jī)動(dòng)目標(biāo)跟蹤精度差的問(wèn)題,研究其改進(jìn)方法;在建立機(jī)動(dòng)目標(biāo)當(dāng)前統(tǒng)計(jì)模型離散狀態(tài)方程和雷達(dá)導(dǎo)引頭離散觀測(cè)方程的基礎(chǔ)上;利用雷達(dá)導(dǎo)引頭測(cè)量信息和位置預(yù)測(cè)值之間的擾動(dòng)對(duì)加速度方差進(jìn)行調(diào)整,提出了改進(jìn)的加速度方差自適應(yīng)調(diào)整無(wú)跡卡爾曼濾波跟蹤算法;數(shù)字仿真驗(yàn)證了該算法對(duì)非機(jī)動(dòng)目標(biāo)、一般機(jī)動(dòng)目標(biāo)以及高機(jī)動(dòng)目標(biāo)均具有良好的跟蹤效果。
當(dāng)前統(tǒng)計(jì)模型;無(wú)跡卡爾曼濾波;雷達(dá)導(dǎo)引頭;自適應(yīng);跟蹤
0 引言
對(duì)機(jī)動(dòng)目標(biāo)建立準(zhǔn)確的運(yùn)動(dòng)模型是進(jìn)行濾波的前提和基礎(chǔ)[1]。目前,常用的運(yùn)動(dòng)模型有勻速模型、勻加速模型、Singer 模型[2]、“當(dāng)前”統(tǒng)計(jì)模型[3]、Jerk模型[4-5]等。其中,當(dāng)前統(tǒng)計(jì)模型是目前應(yīng)用最為廣泛的實(shí)用模型之一,它是由我國(guó)學(xué)者周宏仁教授于1983年提出的。當(dāng)前統(tǒng)計(jì)模型假設(shè)機(jī)動(dòng)目標(biāo)的當(dāng)前加速度為修正的瑞利分布,由于修正瑞利分布本身局限性,該模型無(wú)法準(zhǔn)確描述弱機(jī)動(dòng)目標(biāo)和非機(jī)動(dòng)目標(biāo)的加速度情況,對(duì)弱機(jī)動(dòng)目標(biāo)和非機(jī)動(dòng)目標(biāo)的跟蹤效果較差[6]。
針對(duì)機(jī)動(dòng)目標(biāo)當(dāng)前統(tǒng)計(jì)模型建模及跟蹤中存在的問(wèn)題,很多學(xué)者提出了不同的改進(jìn)措施。文獻(xiàn)[7]通過(guò)加權(quán)一個(gè)以殘差方差的跡為參數(shù)的活化函數(shù),對(duì)加速度方差和機(jī)動(dòng)頻率進(jìn)行自適應(yīng)處理。文獻(xiàn)[8]用正態(tài)分布來(lái)彌補(bǔ)修正瑞利分布的缺陷,同時(shí)利用模糊隸屬度函數(shù)對(duì)系統(tǒng)方差做加權(quán)調(diào)整。文獻(xiàn)[9]結(jié)合升半正態(tài)形模糊分布函數(shù)特性,提出一種加速度方差兩段函數(shù)自適應(yīng)調(diào)整方法。文獻(xiàn)[10]提出了采用鈴形函數(shù)作為模糊隸屬函數(shù)對(duì)模型中加速度極值進(jìn)行修正的方法。
考慮到雷達(dá)導(dǎo)引頭測(cè)量的非線性跟蹤問(wèn)題,無(wú)跡卡爾曼濾波(UKF)算法的計(jì)算量與擴(kuò)展卡爾曼濾波(EKF)算法等同,但精度卻高于EKF算法[11],本文選擇UKF算法作為非線性濾波算法。利用導(dǎo)引頭實(shí)時(shí)測(cè)量信息與位置預(yù)測(cè)值之間的擾動(dòng)對(duì)加速度方差進(jìn)行自適應(yīng)調(diào)整,提出了改進(jìn)的基于當(dāng)前統(tǒng)計(jì)模型的無(wú)跡卡爾曼濾波加速度方差自適應(yīng)跟蹤算法。該算法有效提高了對(duì)弱機(jī)動(dòng)目標(biāo)和非機(jī)動(dòng)目標(biāo)的跟蹤精度,且不依賴于最大加速度度初值。
1 CS-UKF濾波算法
1.1 目標(biāo)運(yùn)動(dòng)狀態(tài)數(shù)學(xué)模型
當(dāng)目標(biāo)正以某一加速度機(jī)動(dòng)時(shí),下一時(shí)刻的加速度取值是有限的,且只能在當(dāng)前加速度的領(lǐng)域內(nèi),為此,我國(guó)學(xué)者周宏仁提出了機(jī)動(dòng)目標(biāo)當(dāng)前統(tǒng)計(jì)模型。當(dāng)前統(tǒng)計(jì)模型能夠更真實(shí)地反映目標(biāo)機(jī)動(dòng)范圍和強(qiáng)度的變化,是目前較好的實(shí)用模型。假設(shè)目標(biāo)在慣性坐標(biāo)系OXYZ中運(yùn)動(dòng),當(dāng)前統(tǒng)計(jì)模型離散狀態(tài)方程為:
X(k+1)=Φ(k+1,k)X(k)+BkU(k)+Γ(k)
(1)


(2)
狀態(tài)噪聲Γ(k)是均值為零的離散時(shí)間白噪聲序列,即
E[Γ(k)ΓT(k+j)]=0,?j≠0
(3)
若j=0,則狀態(tài)噪聲協(xié)方差陣為:
(4)
式中:
q33=[1-e-2aT]。
1.2 雷達(dá)導(dǎo)引頭觀測(cè)數(shù)學(xué)模型
假設(shè)雷達(dá)導(dǎo)引頭位于慣性坐標(biāo)系原點(diǎn),三維條件下的雷達(dá)導(dǎo)引頭觀測(cè)模型為:
Y(k)=h[X(k)]+Π(k)
(5)
式中:Y(k)=[r(k)θ(k)φ(k)]T;
r(k)、θ(k)、φ(k)分別為雷達(dá)導(dǎo)引頭距離、高低角、方位角測(cè)量信息。
測(cè)量噪聲Π(k)是均值為零離散時(shí)間白噪聲序列,即
E[Π(k)ΠT(k+j)]=0,?j≠0
(6)
若j=0,則測(cè)量噪聲協(xié)方差矩陣為
(7)
式中:σr、σθ、σφ分別為距離、高低角、方位角測(cè)量誤差的標(biāo)準(zhǔn)差。
1.3UKF算法
1.3.1 無(wú)味變換

(8)

(9)

(10)
λ=α2(n+k)-n
(11)
(12)

1.3.2 算法描述
UKF是通過(guò)無(wú)味變換使非線性系統(tǒng)方程適用于線性假設(shè)條件下的標(biāo)準(zhǔn)卡爾曼濾波體系,而擴(kuò)展卡爾曼濾波是通過(guò)線性化非線性函數(shù)實(shí)現(xiàn)遞推濾波。因此,UKF比擴(kuò)展卡爾曼濾波能更好地逼近狀態(tài)方程的非線性特性,估計(jì)精度更高[13]。UKF濾波算法描述如下:

2)時(shí)間更新。若不考慮有輸入作用,由式(11)、式(12)可計(jì)算得權(quán)值Wi,則有
(13)
(14)
(15)
(16)
(17)
3)測(cè)量更新。
(18)
(19)
(20)
(21)
(22)
至此,得到了UKF在k時(shí)刻的濾波狀態(tài)和方差。
1.4 改進(jìn)的CS_UKF跟蹤算法
(23)
根據(jù)加速度方差自適應(yīng)算法,當(dāng)“當(dāng)前”加速度為正時(shí):
(24)
當(dāng)“當(dāng)前”加速度為負(fù)時(shí):
(25)

本文利用雷達(dá)導(dǎo)引頭實(shí)時(shí)測(cè)量信息和位置預(yù)測(cè)值之間的擾動(dòng)計(jì)算加速度方差,有效解決了機(jī)動(dòng)目標(biāo)當(dāng)前統(tǒng)計(jì)模型對(duì)一般機(jī)動(dòng)目標(biāo)、非機(jī)動(dòng)目標(biāo)跟蹤精度差和對(duì)最大加速度初值依賴的問(wèn)題。推導(dǎo)過(guò)程如下:
(26)
變換式(26)可得:
(27)
由式(24)或式(25)可知,如果把加速度最大值和加速度預(yù)測(cè)值之間的差值作為加速度擾動(dòng)量,加速度擾動(dòng)量的絕對(duì)值與加速度協(xié)方差成比例關(guān)系。可以利用k-1時(shí)刻到k時(shí)刻的加速度變化量Δax近似表示當(dāng)前時(shí)刻的加速度擾動(dòng)量,從而給出一種加速度協(xié)方差自適應(yīng)調(diào)整表達(dá)式:
(28)
同理可得目標(biāo)在OY軸、OZ軸的加速度方差自適應(yīng)調(diào)整公式為:
(29)
式中,Nx、Ny、Nz分別為OX軸、OY軸、OZ軸加速度協(xié)方差調(diào)整比例系數(shù)。
式(27)~(29)中的x1,k、x2,k、x3,k可以利用雷達(dá)導(dǎo)引頭在當(dāng)前時(shí)刻的測(cè)量值近似估計(jì)得到,即:
(30)
式中:r為k時(shí)刻雷達(dá)距離測(cè)量值;θ為k時(shí)刻雷達(dá)高低角測(cè)量值;φ為k時(shí)刻雷達(dá)方位角測(cè)量值。
2 仿真分析
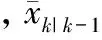
仿真中,假設(shè)雷達(dá)導(dǎo)引頭位于慣性坐標(biāo)系原點(diǎn),雷達(dá)導(dǎo)引頭距離測(cè)量標(biāo)準(zhǔn)差10米,高低角測(cè)量標(biāo)準(zhǔn)差0.3度,方位角測(cè)量標(biāo)準(zhǔn)差0.3度,采樣周期為24毫秒。目標(biāo)初始飛行狀態(tài)為[10 000m,10 000m,10 000m,-300m/s,-300m/s,-880m/s,0, 0, 0]。傳統(tǒng)的機(jī)動(dòng)目標(biāo)當(dāng)前統(tǒng)計(jì)模型自適應(yīng)跟蹤算法簡(jiǎn)稱為CS_UKF;改進(jìn)的機(jī)動(dòng)目標(biāo)當(dāng)前統(tǒng)計(jì)模型自適應(yīng)跟蹤算法簡(jiǎn)稱為ICS_UKF。仿真情形1:目標(biāo)無(wú)機(jī)動(dòng)飛行。仿真情形2:目標(biāo)一般機(jī)動(dòng)飛行,目標(biāo)分別以縱向過(guò)載Ny=-1g、法向過(guò)載Nz=-1g在YOZ平面內(nèi)機(jī)動(dòng)飛行。仿真情形3:目標(biāo)高機(jī)動(dòng)飛行,目標(biāo)分別以縱向過(guò)載Ny=-5g、法向過(guò)載Nz=-5g在YOZ平面內(nèi)機(jī)動(dòng)飛行;在上述測(cè)量精度條件下進(jìn)行100次蒙特卡洛仿真,統(tǒng)計(jì)兩種算法的均方根誤差,兩種算法的仿真結(jié)果如圖1~圖3所示。
圖1 Y方向位置均方根誤差統(tǒng)計(jì)結(jié)果
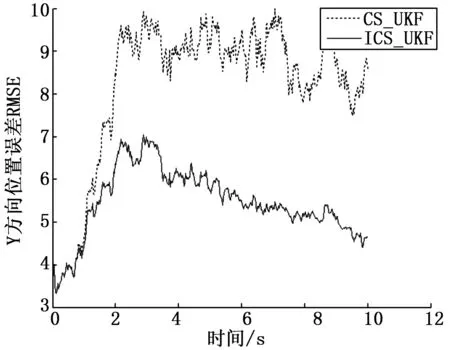
圖2 Y方向位置均方根誤差統(tǒng)計(jì)結(jié)果
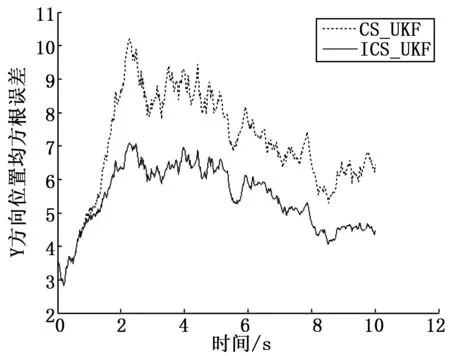
圖3 Y方向位置均方根誤差統(tǒng)計(jì)結(jié)果
1)仿真情形1:目標(biāo)無(wú)機(jī)動(dòng)飛行。
2)仿真情形2:目標(biāo)一般機(jī)動(dòng)飛行。
3)仿真情形3:目標(biāo)高機(jī)動(dòng)飛行。
由仿真結(jié)果可知:改進(jìn)的機(jī)動(dòng)目標(biāo)當(dāng)前統(tǒng)計(jì)模型自適應(yīng)跟蹤算法(ICS_UKF)與傳統(tǒng)的機(jī)動(dòng)目標(biāo)當(dāng)前統(tǒng)計(jì)模型自適應(yīng)跟蹤算法(CS_UKF)相比,對(duì)于非機(jī)動(dòng)目標(biāo)、一般機(jī)動(dòng)目標(biāo)、高機(jī)動(dòng)目標(biāo)均具有更小的跟蹤誤差,更高的跟蹤精度。
3 結(jié)論
對(duì)于非機(jī)動(dòng)目標(biāo)、一般機(jī)動(dòng)目標(biāo)、高機(jī)動(dòng)目標(biāo),改進(jìn)的機(jī)動(dòng)目標(biāo)當(dāng)前統(tǒng)計(jì)模型自適應(yīng)跟蹤算法(ICS_UKF)與傳統(tǒng)的機(jī)動(dòng)目標(biāo)當(dāng)前統(tǒng)計(jì)模型自適應(yīng)跟蹤算法(CS_UKF)相比,均具有較好的跟蹤性能,計(jì)算加速度方差時(shí)也不再依賴于最大加速度初值,且基于UKF的濾波算法有效解決了雷達(dá)導(dǎo)引頭測(cè)量的非線性濾波問(wèn)題;仿真結(jié)果也驗(yàn)證了該算法的有效性。
[1] 歐陽(yáng)超,楊霄鵬,賈航川,等.改進(jìn)的基于“當(dāng)前”統(tǒng)計(jì)模型自適應(yīng)濾波算法及其在航跡預(yù)測(cè)中的應(yīng)用[J]. 科學(xué)技術(shù)與工程,2013(26):7656-7661.
[2] Singer R A. Estimating optimal tracking filter performance for manned manervering targets[J]. IEEE Trans on Aerospace and Electronic Systems,1970: 473-483.
[3] Zhou H R,Kumar K S P. A current statistical model and adaptive algorithm for estimating maneuvering targets[J]. AIAA Journal of Guidance,1984; 7(5) : 596-602.
[4] Mehrotra K,Mahapatra P R. A Jerk model for tracking highly maneuvering targets[J]. IEEE Trans on Aerospace and Electonic Systems,1997; 33(4) : 1094-1105.
[5] 雷 明,韓崇昭. 多級(jí)修正的高機(jī)動(dòng)Jerk模型研究[J]. 西安交通大學(xué)學(xué)報(bào),2006; 40(2) : 138-141.
[6] 錢華明,陳 亮,滿國(guó)晶,等. 基于當(dāng)前統(tǒng)計(jì)模型的機(jī)動(dòng)目標(biāo)自適應(yīng)跟蹤算法[J]. 系統(tǒng)工程與電子技術(shù),2011(10):2154-2158.
[7] 黃偉平,徐 毓,王杰.基于改進(jìn)“當(dāng)前”統(tǒng)計(jì)模型的非線性機(jī)動(dòng)目標(biāo)跟蹤算法[J]. 控制理論與應(yīng)用,2011(12)1723-1728.
[8] 王樹(shù)亮,阮懷林. 修正的當(dāng)前統(tǒng)計(jì)模型自適應(yīng)跟蹤算法[J]. 電子信息對(duì)抗技術(shù),2011.26(1):34-38.
[9] 劉望生,李亞安,崔 琳.基于當(dāng)前統(tǒng)計(jì)模型的機(jī)動(dòng)目標(biāo)自適應(yīng)強(qiáng)跟蹤算法[J].系統(tǒng)工程與電子技術(shù),2011,33(9):1937-1940.
[10] 錢華明,陳 亮,滿國(guó)晶,等.基于當(dāng)前統(tǒng)計(jì)模型的機(jī)動(dòng)目標(biāo)自適應(yīng)跟蹤算法[J].系統(tǒng)工程與電子技術(shù),2011,33(10):2154-2158.
[11] A Romanenko,J Castro. The unscented filter as a alternative to the EKF for nonlinear state estimation:simulation case study[J]. Computers and Chemical Engineering,2004,28:347-355.
[12] JULIER S J,UHLMAN J K.New extension of the Kalman filter to nonlinear systems[J].SPIE Vol.3068,1997.
[13] 朱志宇. 粒子濾波算法及其應(yīng)用[M]. 北京:科學(xué)出版社,2010.
[14] 周宏仁,敬忠良,王培德. 機(jī)動(dòng)目標(biāo)跟蹤[M]. 北京:國(guó)防工業(yè)出版社, 1991.
[15] 周宏仁.機(jī)動(dòng)目標(biāo)“當(dāng)前”統(tǒng)計(jì)模型與自適應(yīng)跟蹤算法[J].航空學(xué)報(bào),1983,4(1):73-86.
Modified Acceleration Variance Adaptive Tracking Algorithm Of CS_UKF
Cui Yankai
(China Airborne Academy, Luoyang Henan 471000,China)
Acceleration variance adaptive adjustment method of maneuvering target current statistical model has low tracking precision for weak maneuvering target and non maneuvering target. The paper puts forward a modified method. Discrete state equation of maneuvering target current statistical model is founded. Discrete observation equation of radar seeker is also founded. This paper puts forward an improved acceleration variance adaptive adjustment algorithm of unscented kalman filtering(UKF),which uses disturbance between radar seeker observational information and prediction value of position to self-adaptive adjustment acceleration variance.The simulation shows that modified CS_UKF algorithm has better tracking precision for weak maneuvering target, non maneuvering target and high maneuvering target.
current statistical model(CS); unscented kalman filtering(UKF); radar seeker;adaptive; tracking
2017-01-18;
2017-02-27。
河南省自然科學(xué)基金(162300410096)。作者簡(jiǎn)介:崔彥凱(1980-),男,河南省漯河市人,博士,主要從事信號(hào)處理技術(shù)方向的研究。
1671-4598(2017)05-0215-03
10.16526/j.cnki.11-4762/tp.2017.05.059
V249.1
B
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03

- 計(jì)算機(jī)測(cè)量與控制的其它文章
- 2kV高穩(wěn)定度高壓脈沖電源設(shè)計(jì)
- 基于藍(lán)牙4.0的微型核輻射劑量計(jì)設(shè)計(jì)
- 基于對(duì)照區(qū)設(shè)置的結(jié)化霜曲線去除霧噪聲的方法實(shí)現(xiàn)
- 醫(yī)院網(wǎng)環(huán)境數(shù)據(jù)中心機(jī)房網(wǎng)絡(luò)設(shè)計(jì)
- 機(jī)載多路DVI視頻信號(hào)轉(zhuǎn)換器設(shè)計(jì)
- 基于FPGA的激光光束自對(duì)準(zhǔn)電氣自動(dòng)化系統(tǒng)設(shè)計(jì)