基于Arduino 循跡小車的設計
2017-05-18 09:22:02廣州城建職業學院牟海榮
電子世界 2017年9期
關鍵詞:單片機
廣州城建職業學院 牟海榮
基于Arduino 循跡小車的設計
廣州城建職業學院 牟海榮
本設計采用Atmega328微處理控制器的Arduino單片機為主控制器,通過循跡傳感器實現無人小車自動循跡運動,同時在手機或PC上能實現遠程控制和顯示的溫度采集測控系統。采用RS232協議串行通信方式,將采集的數據發送至手機終端上的軟件程序,由手機上的軟件接收并處理數據。
1.總體方案設計
基于Arduino主控板和循跡傳感器實現小車自動循跡控制系統,通過傳感器回饋的數字信號傳入主控處理后,再輸出到L293D驅動板驅動直流電機實現小車的自動工作,實現工作站的無人工作。實時時鐘芯片實時對溫度傳感器采集溫度數據,在手機上也能實現遠程控制和顯示時間、溫度數據。同時手機也能控制小車實現手動控制。溫度采集和小車的控制主要由手機上的軟件進行擔任。該軟件系統在VB環境下建立,通過接受單片機處理后上傳回到手機的溫度數據進行數據整理加工,并在軟件上顯示出來。實現直觀瀏覽和報警功能。另外,可對單片機進行遠程控制,實現了小車能夠有多種方式進行工作運行。
2.硬件電路設計
整個系統由Arduino單片機最小系統、L293D驅動電機模塊驅動直流減速電機,循跡傳感器模塊和藍牙模塊組成。小車在運動中時選擇一種模式進行工作是自主運動還是藍牙控制,如果小車的循跡傳感器開始工作,自動循線工作,同時超聲波檢測到障礙物時,超聲波接受到信號,傳輸到單片機中,執行電機停止,退后再左轉的指令,然后繼續前進。如果小車選擇藍牙控制就根據手機上發送的指令來控制。
2.1 L293D驅動電路設計
如圖1所示為一個典型的直流電機控制電路。電路得名于“H橋驅動電路”是因為它的形狀酷似字母H。 H橋式電機驅動電路包括4個三極管和一個電機。要使電機運轉,必須導通對角線上的一對三極管。根據不同三極管對的導通情況,電流可能會從左至右或從右至左流過電機,從而控制電機的轉向。要使電機運轉,必須使對角線上的一對三極管導通。例如,如圖4.13所示,當Q1管和Q4管導通時,電流就從電源正極經Q1從左至右穿過電機,然后再經Q4回到電源負極。按圖中電流箭頭所示,該流向的電流將驅動電機順時針轉動。當三極管Q1和Q4導通時,電流將從左至右流過電機,從而驅動電機按特定方向轉動。如果要想電機反轉就是當三極管Q2和Q3導通時,電流將從右至左流過電機,從而驅動電機反轉。
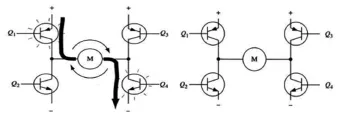
圖1 直流電機控制電路
小車處于自動循徑狀態時, 由于小車需要自動搜索,如果小車速度過快,慣性過大,同時傳感器會有可能出現處理信號不及時,就很容易脫離控制,不能再自主的循線工作,此時可以通過輸出 PWM 波來控制小車的轉速。脈寬調制(PWM)基本原理:控制方式就是對逆變電路開關器件的通斷進行控制,使輸出端得到一系列幅值相等的脈沖,用這些脈沖來代替正弦波或所需要的波形。也就是在輸出波形的半個周期中產生多個脈沖,使各脈沖的等值電壓為正弦波形,所獲得的輸出平滑且低次諧波少。按一定的規則對各脈沖的寬度進行調制,即可改變逆變電路輸出電壓的大小,也可改變輸出頻率。
2.2 循跡單元電路設計
74HC140D循跡傳感器模塊對環境光線適應能力較強,其具有一對紅外線發射與接收管,發射管發射出一定頻率的紅外線,當檢測方向遇到障礙物(反射面)時,紅外線反射回來被接收管接收,經過比較器電路處理之后,紅色指示燈會亮起,同時信號輸出接口輸出數字信號(一個低電平信號),可通過電位器旋鈕調節檢測距離,有效距離范圍 2~30cm,工作電壓為3.3V-5V。該傳感器的探測距離可以通過電位器調節、具有干擾小、便于裝配、使用方便等特點,可以廣泛應用于機器人避障、避障小車、流水線計數及黑白線循跡等眾多場合。
2.3 藍牙單元電路設計
采用 HC-05嵌入式藍牙串口通訊模塊。 該模塊具有兩種工作模式:命令響應工作模式和自動連接工作模式,在自動連接工作模式下模塊又可分為主(Master)、從(Slave)和回環(Loopback)三種工作角色。當模塊處于自動連接工作模式時,將自動根據事先設定的方式連接的數據傳輸;當模塊處于命令響應工作模式時能執行下述所有AT命令,用戶可向模塊發送各種AT指令,為模塊設定控制參數或發布控制命令。通過控制模塊外部引腳(PIO11)輸入電平,可以實現模塊工作狀態的動態轉換。
3.控制程序設計
采用目前較為常用的SPP串口軟件作為初期軟件平臺系統來完成小車的控制,這一個軟件不需要自己再去編程,只需要對每一個通道進行一個定義就可以了。
4.結論
系統設計采用Arduino單片機系統的設計與實現具有成本低廉、設計簡單且性能較好,調節響應時間快,簡化了硬件結構,穩態誤差小自主循跡效果好。該智能車可在黑色導引線上穩定、可靠的自動行駛,能準確實現自主尋跡,具備抗干擾性強、速度調節響應時間短、穩態誤差小等特點。
[1]趙津,朱三超.基于Arduino單片機的智能避障小車設計[J].自動化與儀表 2013.05.
[2]聶茹,嚴明.基于Arduino開發板的智能小車設計[J].微處理機,2015,04.
[3]戈惠梅,等.基于Arduino的智能小車避障系統的設計[J].現代電子技術,2014,11.
牟海榮(1981-),女,講師,廣州城建職業學院機電工程學院,研究方向:自動控制。
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36
