危化品倉(cāng)庫(kù)障礙物掃描定位和還原算法的研究
2017-05-17 13:48:54劉學(xué)君袁碧賢
自動(dòng)化儀表 2017年5期
關(guān)鍵詞:危化品
劉學(xué)君,李 京,2,盧 浩,2,戴 波,袁碧賢,2
(1.北京石油化工學(xué)院信息工程學(xué)院,北京 102617;2.北京化工大學(xué)信息科學(xué)與技術(shù)學(xué)院,北京 100029)
危化品倉(cāng)庫(kù)障礙物掃描定位和還原算法的研究
劉學(xué)君1,李 京1,2,盧 浩1,2,戴 波1,袁碧賢1,2
(1.北京石油化工學(xué)院信息工程學(xué)院,北京 102617;2.北京化工大學(xué)信息科學(xué)與技術(shù)學(xué)院,北京 100029)
隨著現(xiàn)代物流業(yè)的發(fā)展,倉(cāng)儲(chǔ)安全越來(lái)越受到人們的重視,危化品倉(cāng)庫(kù)的倉(cāng)儲(chǔ)安全尤為重要。危化品倉(cāng)庫(kù)中障礙物的掃描、定位、還原過(guò)程,用于顯示障礙物的位置、大小和形狀等準(zhǔn)確的數(shù)字化信息。根據(jù)這些信息,管理員可對(duì)倉(cāng)庫(kù)內(nèi)部情況作出準(zhǔn)確的判斷,并采取恰當(dāng)?shù)拇胧行ьA(yù)防危化品倉(cāng)庫(kù)安全事故的發(fā)生。為了對(duì)危化品倉(cāng)庫(kù)的障礙物進(jìn)行掃描、定位和還原形狀尺寸,對(duì)激光掃描裝置測(cè)得的數(shù)據(jù)進(jìn)行了數(shù)據(jù)擬合。首先,利用激光掃描裝置對(duì)無(wú)障礙物進(jìn)行掃描,得到掃描數(shù)據(jù)并擬合建立正常狀態(tài)。然后,對(duì)長(zhǎng)方體障礙物的情況進(jìn)行掃描,對(duì)得到的異常點(diǎn)進(jìn)行數(shù)據(jù)擬合。最后,對(duì)圓柱體障礙物進(jìn)行掃描,對(duì)收集到的異常點(diǎn)進(jìn)行數(shù)據(jù)擬合。試驗(yàn)結(jié)果表明,采用該算法得到的長(zhǎng)度最大誤差值小于0.05m,能較好地實(shí)現(xiàn)圖像還原,滿(mǎn)足危化品倉(cāng)庫(kù)監(jiān)控需求。該算法經(jīng)濟(jì)實(shí)用,具有很好的應(yīng)用前景。
物流; 倉(cāng)儲(chǔ)安全; 危化品; 激光掃描; 障礙物; 最小二乘法; 誤差
0 引言
隨著國(guó)民經(jīng)濟(jì)和現(xiàn)代物流業(yè)的迅速發(fā)展,倉(cāng)儲(chǔ)安全顯得越來(lái)越重要[1-2],尤其是在危化品倉(cāng)庫(kù)方面。危化品具有易燃易爆的特點(diǎn)[3-4],一旦危化品倉(cāng)庫(kù)發(fā)生事故,對(duì)人們的生命和財(cái)產(chǎn)將會(huì)造成不可估量的損失[5-6]。為了預(yù)防發(fā)生危化品倉(cāng)庫(kù)安全事故,傳統(tǒng)情況下,一般采用視頻監(jiān)控技術(shù)。視頻監(jiān)控依據(jù)視頻圖像來(lái)查看倉(cāng)庫(kù)內(nèi)異樣,需要人長(zhǎng)期在屏幕前監(jiān)視。針對(duì)視頻監(jiān)控的缺點(diǎn),設(shè)計(jì)了一套激光掃描監(jiān)測(cè)裝置,對(duì)倉(cāng)庫(kù)障礙物進(jìn)行安全監(jiān)測(cè)。在危化品倉(cāng)庫(kù)中,激光掃描裝置掃描到障礙物,并對(duì)其進(jìn)行定位和形狀尺寸還原,給管理員報(bào)警。管理員可以根據(jù)障礙物的位置、形狀和尺寸,決定怎么處理發(fā)現(xiàn)的障礙物。
1 系統(tǒng)結(jié)構(gòu)
掃描監(jiān)測(cè)裝置分為主控單元、細(xì)分驅(qū)動(dòng)、步進(jìn)電機(jī)、蝸輪蝸桿、距離傳感器、角度檢測(cè)傳感器[7-9]這六部分,其結(jié)構(gòu)如圖1所示。主控單元接收位置信息并處理,發(fā)出控制信號(hào)給細(xì)分驅(qū)動(dòng)。細(xì)分驅(qū)動(dòng)是主控單元和步進(jìn)電機(jī)的中間環(huán)節(jié),把邏輯控制信號(hào)細(xì)分轉(zhuǎn)化為可驅(qū)動(dòng)步進(jìn)電機(jī)運(yùn)行的功率電流。步進(jìn)電機(jī)是執(zhí)行機(jī)構(gòu),接收細(xì)分驅(qū)動(dòng)傳過(guò)來(lái)的驅(qū)動(dòng)信號(hào),并按相應(yīng)指令動(dòng)作。蝸輪蝸桿是步進(jìn)電機(jī)與工作臺(tái)之間的連接機(jī)構(gòu),其作用是增大步進(jìn)電機(jī)的扭矩和轉(zhuǎn)換運(yùn)動(dòng)方向。距離傳感器收集距離數(shù)據(jù),角度檢測(cè)傳感器收集角度數(shù)據(jù),它們把這些信息反饋給主控單元。

圖1 掃描監(jiān)測(cè)裝置結(jié)構(gòu)圖
2 算法研究
對(duì)掃描程序的設(shè)計(jì),先用激光掃描,判斷有無(wú)異常點(diǎn)。沒(méi)有異常點(diǎn),狀態(tài)正常,繪制圖形,作為原始狀態(tài);當(dāng)發(fā)現(xiàn)異常點(diǎn)時(shí),判斷位置,進(jìn)行數(shù)據(jù)統(tǒng)計(jì),并且數(shù)據(jù)擬合,與數(shù)據(jù)庫(kù)作比對(duì),判斷是直線(xiàn)還是曲線(xiàn),組合出來(lái)圖形是矩形還是圓形或者其他圖形。管理員根據(jù)圖形和長(zhǎng)度決定處理方法。本研究中,把最小二乘法應(yīng)用到圖形恢復(fù)和尺寸還原,建立一個(gè)原始數(shù)據(jù)狀態(tài)。當(dāng)掃描到異常數(shù)據(jù)時(shí)報(bào)警,并對(duì)異常點(diǎn)擬合,與數(shù)據(jù)庫(kù)作對(duì)比,從而大致判斷障礙物的形狀和尺寸。
擬合就是把一組數(shù)據(jù)擬合成一個(gè)最佳匹配函數(shù)。數(shù)據(jù)擬合采用的算法為最小二乘法。設(shè)逼近函數(shù)為[10-11]:
f(x)=a0+a1x+…+anxn
(1)
式中:a0,a1,…,an為待定系數(shù)。
(2)
方差取得最小值時(shí)得到系數(shù)值(a0,ai,…,an),進(jìn)而可以得到逼近函數(shù)。當(dāng)σ2數(shù)值最小,數(shù)據(jù)點(diǎn)在曲線(xiàn)兩側(cè)分布最均勻時(shí),即令ε=f(xk)-yk。n為自然數(shù),取值范圍預(yù)先設(shè)定為1~3,根據(jù)擬合曲線(xiàn)選擇最匹配的值。
2.1 對(duì)無(wú)障礙物的掃描算法
首先,固定掃描儀三腳架,調(diào)整激光掃描平臺(tái)位置,避免平臺(tái)歪斜或擺設(shè)不符要求,并記錄掃描儀位置。然后,開(kāi)啟監(jiān)測(cè)裝置,對(duì)沒(méi)有障礙物時(shí)進(jìn)行掃描,即在正常情況下進(jìn)行激光掃描,建立正常狀態(tài),作為參考,將沒(méi)有障礙物時(shí)的數(shù)據(jù)擬合。程序運(yùn)行進(jìn)入監(jiān)控狀態(tài),用激光掃描得到數(shù)據(jù)。數(shù)據(jù)圖采用直角坐標(biāo)系,以激光掃描儀口為原點(diǎn)。激光掃描得到的數(shù)據(jù)以直角坐標(biāo)系顯示,即可得到(x,y)坐標(biāo)點(diǎn)的數(shù)據(jù)圖。試驗(yàn)中,激光掃描儀的激光發(fā)射口取為坐標(biāo)原點(diǎn)(0,0),旋轉(zhuǎn)掃描得到各個(gè)角度對(duì)應(yīng)的距離值。設(shè)計(jì)掃描角度范圍在125~135 ℃時(shí)有障礙物,編碼器精度為0.02 ℃。角度值和距離值轉(zhuǎn)換為對(duì)應(yīng)的直角坐標(biāo)值。編碼器得到的角度值是十六進(jìn)制,需要通過(guò)數(shù)制轉(zhuǎn)換得到十進(jìn)制數(shù)。
激光掃描儀掃描得到角度和距離值數(shù)據(jù),進(jìn)而對(duì)極坐標(biāo)進(jìn)行轉(zhuǎn)換得到直角坐標(biāo)數(shù)據(jù)圖。無(wú)障礙物時(shí),激光掃描得到無(wú)障礙物數(shù)據(jù)圖。數(shù)據(jù)點(diǎn)大約在X軸(-1.65,-1.2)和Y軸(1.5,1.9)之間。采用最小二乘法,將這些數(shù)據(jù)點(diǎn)進(jìn)行數(shù)據(jù)擬合,得到擬合曲線(xiàn)圖。無(wú)障礙物數(shù)據(jù)擬合曲線(xiàn)圖如圖2所示。
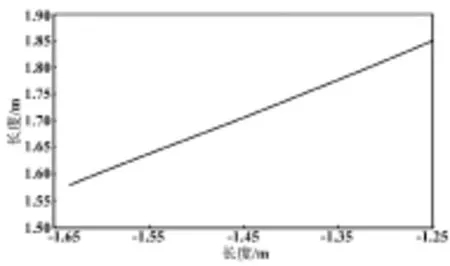
圖2 無(wú)障礙物數(shù)據(jù)擬合曲線(xiàn)圖
由圖2可知,擬合曲線(xiàn)的函數(shù)表達(dá)式為y=0.697 8x+2.719 2,而曲線(xiàn)長(zhǎng)度積分公式[12]為:
(3)
將數(shù)據(jù)點(diǎn)數(shù)值代入曲線(xiàn)長(zhǎng)度積分公式(1),得到曲線(xiàn)長(zhǎng)度0.471 m。實(shí)際掃描寬度為0.490 m,所以產(chǎn)生誤差為0.019 m。
2.2 對(duì)長(zhǎng)方體障礙物的掃描算法
在激光掃描范圍內(nèi)放置一個(gè)長(zhǎng)方體盒子,掃描2次后,得到長(zhǎng)方體障礙物數(shù)據(jù)圖。將掃描得到的數(shù)據(jù)與正常情況無(wú)障礙時(shí)的距離進(jìn)行比對(duì),在X軸(-1.45,-1.25)和Y軸(1.5,1.65)之間,出現(xiàn)一些異常點(diǎn),判斷為障礙物,進(jìn)行報(bào)警。對(duì)獲得的數(shù)據(jù)點(diǎn)進(jìn)行數(shù)據(jù)擬合,得到長(zhǎng)方體障礙物數(shù)據(jù)擬合圖。這樣,管理員可以大致判斷在相應(yīng)位置存在有棱角的障礙物,判斷為矩形物體。長(zhǎng)方體障礙物數(shù)據(jù)擬合曲線(xiàn)圖如圖3所示。
其二,我喜《雜文月刊》,是因她是“一本有良知、講真話(huà)的雜志”。她不同于某些網(wǎng)頁(yè)戴著墨鏡看世界,所載盡是唯恐天下不亂的“憤青文”;也不同于某些脫離實(shí)際,不接地氣的“偽高調(diào)”“假大空”的“雞湯文”。她是和黨中央在政治上保持高度一致的大前提下,聯(lián)系當(dāng)今社會(huì)人民群眾身邊的真人真事,針砭時(shí)弊,激濁揚(yáng)清。不僅提出問(wèn)題、分析問(wèn)題尖銳、潑辣,有精辟獨(dú)到的見(jiàn)解,而且也有解決問(wèn)題的建設(shè)性意見(jiàn),把話(huà)說(shuō)到了老百姓的心坎上,自然引起了老百姓的共鳴。不僅有令人蕩氣回腸之感,還能讓人深思,自己應(yīng)該怎么做,實(shí)現(xiàn)雜文“以文化人”傳播正能量的使命。
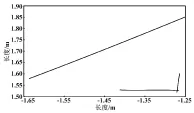
圖3 長(zhǎng)方體障礙物數(shù)據(jù)擬合曲線(xiàn)圖
擬合得到三個(gè)擬合曲線(xiàn)函數(shù),函數(shù)表達(dá)式分別為:f(x1)=y1=0.699 7x1+2.727;f(x2)=y2=12.581x2+17.5;f(x3)=y3=0.026 8x3+1.493 6。
根據(jù)曲線(xiàn)長(zhǎng)度公式(1),得到長(zhǎng)方體寬度為0.088 m、長(zhǎng)度為0.141 m,而實(shí)際長(zhǎng)方體寬度為0.095 m、長(zhǎng)度為0.155 m;掃描數(shù)據(jù)誤差分別為0.007 m和0.014 m。
2.3 對(duì)圓柱體障礙物的掃描算法
在激光掃描范圍內(nèi)放置一個(gè)圓柱體,掃描2次得到圓柱障礙物數(shù)據(jù)掃描圖。與無(wú)障礙物時(shí)正常狀態(tài)的數(shù)據(jù)作對(duì)比,數(shù)據(jù)圖在X軸(-1.4,-1.25)和Y軸(1.55,1.65)之間出現(xiàn)異常點(diǎn),進(jìn)行報(bào)警。所得到的數(shù)據(jù)點(diǎn)被擬合,得到圓柱障礙物數(shù)據(jù)擬合圖。異常點(diǎn)為一段弧線(xiàn),判斷為圓柱類(lèi)障礙物。圓柱障礙物數(shù)據(jù)擬合曲線(xiàn)圖如圖4所示。
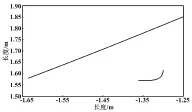
圖4 圓柱障礙物數(shù)據(jù)擬合曲線(xiàn)圖
擬合函數(shù)表達(dá)式為:
f(x1)=y1=0.700 9x1+2.723 8
(4)
異常數(shù)據(jù)點(diǎn)取自變量2次冪,擬合度較好,擬合曲線(xiàn)函數(shù)表達(dá)式為:
(5)
f(x2)是一個(gè)二次函數(shù),即為一段弧線(xiàn)。弧線(xiàn)可被判斷為原柱狀物,由于f(x1)直線(xiàn)缺一段,故測(cè)得直徑為0.073 m;圓柱體實(shí)際直徑為0.077 m;激光掃描數(shù)據(jù)誤差為0.004 m。
3 試驗(yàn)結(jié)果
把試驗(yàn)掃描的曲線(xiàn)長(zhǎng)度與實(shí)際物體尺寸進(jìn)行對(duì)比,如表1所示。
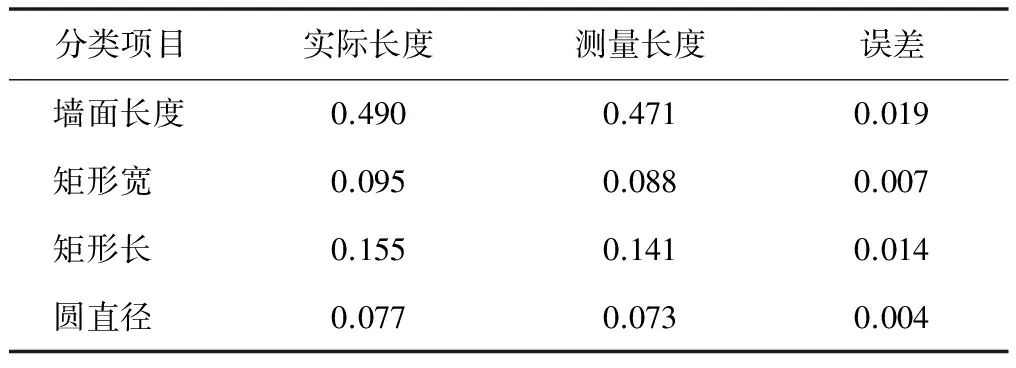
表1 試驗(yàn)結(jié)果與實(shí)際情況的對(duì)比
表1分別對(duì)墻面長(zhǎng)度、矩形寬、矩形長(zhǎng)和圓直徑實(shí)際測(cè)量長(zhǎng)度和掃描測(cè)量長(zhǎng)度進(jìn)行了對(duì)比。由表1數(shù)據(jù)可知,采用本算法的掃描計(jì)算得到的長(zhǎng)度最大誤差為0.019 m,小于危化品倉(cāng)庫(kù)要求的0.050 m,滿(mǎn)足危化品倉(cāng)儲(chǔ)需求。
4 結(jié)束語(yǔ)
危化品倉(cāng)庫(kù)中的障礙物定位和形狀還原,對(duì)預(yù)防危化品倉(cāng)庫(kù)事故極具意義。本研究設(shè)計(jì)了一套掃描儀監(jiān)測(cè)裝置進(jìn)行掃描定位,建立原始數(shù)據(jù)狀態(tài),當(dāng)掃到異常點(diǎn)的時(shí)候,用最小二乘法數(shù)據(jù)擬合。通過(guò)對(duì)長(zhǎng)方體,圓柱狀物體的試驗(yàn),證明對(duì)障礙物距離、形狀和尺寸恢復(fù)有較好的效果,誤差小于安全要求的0.050 m,滿(mǎn)足危化品倉(cāng)庫(kù)需求。在實(shí)際情況中,該方法能為管理員清楚提供危化品倉(cāng)庫(kù)障礙物的相關(guān)數(shù)據(jù),使庫(kù)內(nèi)狀態(tài)信息數(shù)字化,為判斷和處理庫(kù)內(nèi)情況提供切實(shí)依據(jù)。該方法為多個(gè)固定激光掃描儀組合,數(shù)據(jù)匯總得到障礙物立體圖和倉(cāng)庫(kù)全局狀態(tài)圖奠定基礎(chǔ),為危化品倉(cāng)庫(kù)監(jiān)控提供技術(shù)支持,具有很好的應(yīng)用前景。
[1] 甘學(xué).危險(xiǎn)化學(xué)品倉(cāng)庫(kù)的安全管理策略研究[J].煤炭與化工,2015(6):158-160.
[2] 裘靜.探討港口危險(xiǎn)品的倉(cāng)儲(chǔ)安全管理問(wèn)題思考[J].中國(guó)金屬通報(bào),2016(6):61-62.
[3] 師立晨,王如君,多英全.我國(guó)危險(xiǎn)化學(xué)品重大危險(xiǎn)源安全監(jiān)管存在問(wèn)題及建議[J].中國(guó)安全生產(chǎn)科學(xué)技術(shù),2014,12(12):161-166.
[4] 范祥,葉春明,仝偉亮.新形勢(shì)下我國(guó)危化品倉(cāng)儲(chǔ)安全問(wèn)題研究[J].物流科技,2016(10):148-151.
[5] 畢文婷.危險(xiǎn)品倉(cāng)儲(chǔ)如何“轉(zhuǎn)危為安”[J].勞動(dòng)保護(hù),2016(8):87-89.
[6] 李艷華.危險(xiǎn)化學(xué)品倉(cāng)儲(chǔ)存在的問(wèn)題和安全對(duì)策[J].工業(yè)安全與環(huán)保,2009(2):25-27.
[7] 黃凱奇,陳曉棠,康運(yùn)鋒,等.智能視頻監(jiān)控技術(shù)綜述[J].計(jì)算
機(jī)學(xué)報(bào),2015(6):1093-1118.
[8] 劉學(xué)君,江帆,戴波,等.基于A(yíng)RM的危化品倉(cāng)庫(kù)堆垛安全距離監(jiān)測(cè)裝置的研究與開(kāi)發(fā)[J].制造業(yè)自動(dòng)化,2016(4):11-14,25.
[9] 劉學(xué)君,江帆,戴波,等.基于激光測(cè)距儀的危化品倉(cāng)庫(kù)堆垛安全距離的網(wǎng)格化監(jiān)測(cè)方案[C]//中國(guó)自動(dòng)化大會(huì),2015:21-50.
[10]徐亦唐.基于最小二乘法的曲線(xiàn)擬合及其在Matlab中的應(yīng)用[J].電子世界,2013(10):102-103.
[11]陳良波,鄭亞青.基于最小二乘法的曲線(xiàn)擬合研究[J].無(wú)錫職業(yè)技術(shù)學(xué)院學(xué)報(bào),2012(5):52-55.
[12]同濟(jì)大學(xué)數(shù)學(xué)教研室.高等數(shù)學(xué)[M].北京:高等教育出版社,2000.
科技論文中文文摘的撰寫(xiě)
摘要是現(xiàn)代科技論文的必要附加部分,只有極短的文章才能省略。它是幫助讀者從浩瀚的信息海洋中能較快、較準(zhǔn)地找到他們所需要的科技信息的一種有效工具。摘要一般置于作者及其工作單位之后、關(guān)鍵詞之前。
根據(jù)GB/T 6447-1986《文摘編寫(xiě)規(guī)則》關(guān)于摘要的定義,摘要是以提供文獻(xiàn)內(nèi)容梗概為目的,不加評(píng)論和補(bǔ)充解釋?zhuān)?jiǎn)明、確切地記述文獻(xiàn)重要內(nèi)容的短文。按摘要的不同功能來(lái)劃分,它大致分為報(bào)道性摘要、指示性摘要、報(bào)道-指示性摘要3種類(lèi)型。一般的科技論文應(yīng)盡可能采用報(bào)道性摘要。摘要中應(yīng)寫(xiě)的內(nèi)容一般包括研究工作的目的、方法、結(jié)果和結(jié)論,而重點(diǎn)是結(jié)果和結(jié)論。根據(jù)有關(guān)規(guī)定,撰寫(xiě)摘要應(yīng)注意以下幾點(diǎn)。
① 省略“我們”“作者”“筆者”“本文”這樣的主語(yǔ)。
② 簡(jiǎn)短精煉,明確具體。簡(jiǎn)短,指篇幅短,一般以不超過(guò)350字為宜(依摘要類(lèi)型而定);精煉,指摘錄出原文的精華,無(wú)多余的話(huà);明確具體,指表意明白,不含糊,無(wú)空泛、籠統(tǒng)的詞語(yǔ),應(yīng)有較多而有用的定性和定量的信息。
③ 一般不要交代背景,更不要闡述一般性知識(shí)。
④ 格式要規(guī)范,一般不分段,盡可能用規(guī)范術(shù)語(yǔ),不用非共知共用的符號(hào)和術(shù)語(yǔ)。不能簡(jiǎn)單地重復(fù)題名中已有的信息,并切忌羅列段落標(biāo)題來(lái)代替摘要。除了實(shí)在無(wú)變通辦法可用以外,一般不出現(xiàn)插圖、表格,以及參考文獻(xiàn)序號(hào),一般不用數(shù)學(xué)公式和化學(xué)結(jié)構(gòu)式。
Research on the Scan Positioning and Reduction Algorithm for Obstacles in Hazardous Chemicals Warehouse
LIU Xuejun1,LI Jing1,2,LU Hao1,2,DAI Bo1,YUAN Bixian1,2
(1.College of Information Engineering,Beijing Institute of Petrochemical Technology,Beijing 102617,China; 2.College of Information Science and Technology,Beijing University of Chemical Technology,Beijing 100029,China)
Along with the development of modern logistics industry,more and more attention has been paid by people on warehousing security,especially for the storage security of the hazardous chemicals warehouse.Scanning,positioning and reduction processes for the obstacles in hazardous chemicals warehouse are used for displaying accurate digitized information of the position,sixe,and shape of obstacles.In accordance with such information, administrators can make precise judgment on the situation inside warehouse,and take appropriate measures to effectively prevent occurrence of accidents in hazardous chemicals warehouse.In order to conduct scan,positioning and restore the shape and size of the obstacle,the data obtained by the laser scanning device are fitted.Firstly,the laser scanning device is used to scan the scene without obstacle; the scanned data are fitted to establish the normal state.Then,the rectangular obstacle is scanned; the data fitting is conducted for the abnormal points.Finally,the cylindrical obstacle is scanned and the data fitting is conducted for the abnormal points.The experimental results show that with this algorithm the maximum error of the length is less than 0.05m,the image restoration can be better achieved,to meet the monitoring requirement for hazardous chemicals warehouse,the method is economical and practical,and has good application prospects.
Logistics; Warehousing security; Hazardous chemicals; Laser scanning; Obstacle; Least square method; Error
北京市教育委員會(huì)科技計(jì)劃面上項(xiàng)目(15032221001/006)、北京市教育委員會(huì)市屬高校創(chuàng)新能力提升計(jì)劃項(xiàng)目(2016014222000041)、北京石油化工學(xué)院科技創(chuàng)新資助項(xiàng)目(15031862005/052)、北京石油化工學(xué)院優(yōu)秀青年教師和管理骨干培育計(jì)劃項(xiàng)目(08031862008/040)、2015年度青年教師科技創(chuàng)新能力提升計(jì)劃項(xiàng)目(15031862005/052)
劉學(xué)君(1977—),男,博士,副教授,主要從事單片機(jī)開(kāi)發(fā)和光纖通信方向的研究。E-mail: qinbufei@foxmail.com。
TH-3;TP274+.2
A
10.16086/j.cnki.issn1000-0380.201705021
修改稿收到日期:2016-11-24
猜你喜歡
江蘇安全生產(chǎn)(2022年8期)2022-11-01 09:14:48
江蘇安全生產(chǎn)(2022年6期)2022-07-29 01:22:36
江蘇安全生產(chǎn)(2022年4期)2022-05-23 13:03:42
水上消防(2021年5期)2022-01-18 05:33:28
江蘇安全生產(chǎn)(2021年8期)2021-11-05 08:14:52
江蘇安全生產(chǎn)(2021年8期)2021-11-05 08:14:52
江蘇安全生產(chǎn)(2021年4期)2021-07-19 06:03:26
水上消防(2020年4期)2021-01-04 01:51:18
江蘇安全生產(chǎn)(2020年8期)2020-10-27 01:53:26
江蘇安全生產(chǎn)(2020年6期)2020-07-28 07:48:26
