不同解算條件下PANDA軟件靜態精密單點定位分析
2017-05-16 00:37:10薛映俊郭金運毛繼軍劉智敏
全球定位系統 2017年1期
薛映俊,郭金運,毛繼軍,劉智敏
(1.山東科技大學 測繪科學與工程學院,山東 青島266590; 2.山東省國土測繪院,山東 濟南 250102)
?
不同解算條件下PANDA軟件靜態精密單點定位分析
薛映俊1,郭金運1,毛繼軍2,劉智敏1
(1.山東科技大學 測繪科學與工程學院,山東 青島266590; 2.山東省國土測繪院,山東 濟南 250102)
分析了PANDA軟件精密單點定位的數據處理策略,并采用SDCORS網 81個測站2012年第一周的GPS觀測數據進行靜態精密單點定位處理,通過得到的各測站年積日001~007的單天解進行統計分析,驗證了該軟件在山東區域進行精密單點定位的精度及可靠性。通過對比分析,研究了不同衛星截止高度角、不同對流層映射函數、不同星歷鐘差產品以及不同觀測數據時長對其精密單點定位精度的影響。結果顯示,當衛星截止高度角設置為10°、采用GMF對流層映射函數、利用精密星歷和鐘差、觀測數據時長超過18 h時,PANDA軟件靜態精密單點定位的精度能夠達到2 cm.
PANDA軟件;SDCORS網;精密單點定位;衛星截止高度角;映射函數;星歷鐘差產品
0 引 言
精密單點定位(PPP)理論與方法是GNSS 領域研究的熱點[1-2]。通過PPP技術,利用高精度的星歷和鐘差產品對單個測站的觀測數據進行處理,能夠獲得高精度定位結果,PPP具有成本低、工作量小的特點[3]。目前PPP技術的實現主要是基于GPS單系統[4],定位的精度已經實現了靜態mm-cm級、動態cm-dm級[5-10]。隨著一些新的算法和誤差改正模型的不斷改進和提出,IGS提供的星歷和鐘產品的精度不斷提高以及硬件性能的不斷完善[11-12],精密單點定位理論也進一步完善,PPP定位的精度不斷提高[13],在精密測量、變形監測以及航空測量等多個領域都得到了廣泛應用[14-15]。
當前國際上有多個PPP處理軟件,例如美國噴氣動力實驗室(JPL)研制的非差定軌定位軟件GIPSY[16]和瑞士伯爾尼大學研制的軟件BERNESR[17]以及武漢大學衛星導航定位技術研究中心研發的PANDA[18]。其中GIPSY只提供可執行文件,采用非差方式處理GPS觀測值,但在模糊度解算時采用差分模式[19]。BERNESE軟件的精密單點定位是采用非差方法進行,但整網平差卻是利用雙差進行。而PANDA軟件采用的是非差模式,通過逐個歷元建立觀測方程[15,20],來實現測站的靜態、動態定位,與國際GNSS服務組織(IGS)精密星歷比較,測站靜態定位精度在17 mm左右。并且該軟件近年來不斷引入新的計算方法與誤差模型,在模糊度固定、參數估計、動力學模型等關鍵技術研究方面不斷突破,軟件的功能不斷成熟與完善。PPP模塊中采用了地面跟蹤網數據估計單差的初始相位延遲(Uncalibrated Phase Delays),來去掉單差模糊度的小數部分,從而固定單差模糊度的新方法。利用此方法可以固定80%的獨立模糊度,固定解相比浮點解精度也提高了30%左右[18]。因此PANDA軟件得到了越來越廣泛應用。
為了對山東省CORS(SDCORS)網數據進行快速高精度處理,本文結合SDCORS網的觀測數據,利用PANDA 軟件的PPP模塊進行靜態精密單點定位處理。通過結果分析該軟件精密單點定位的穩定性及可靠性,并且進一步分析衛星截止高度角、對流層投影函數、最終星歷及鐘差和快速星歷及鐘差以及不同時長的觀測數據對其定位精度的影響。
1 PANDA軟件精密單點定位
PANDA軟件的精密單點定位模塊主要采用非差處理模式,為了探測和修復周跳,對數據編輯和周跳探測采取單站數據處理方法[21]。并通過引入新的模糊度參數來處理未修復的周跳,在殘差編輯模塊的質量控制部分對未完全探測出的小周跳與粗差進行處理[18]。當前該軟件已經能夠處理包括GPS、衛星激光測距(SLR)、K頻段測距(KBR)、衛星姿態與加速度計等多種類型觀測數據。
PANDA軟件的精密單點定位處理首先要讀取GPS標準數據格式的RINEX文件,包括觀測文件(O文件)、廣播星歷文件(brdc文件)、精密星歷和鐘差文件(sp3和clk文件)等。GPS的數據質量是實現高精度定位的基礎,因此觀測數據的預處理也就尤為重要[22]。預處理的好壞對定位精度的高低有著直接影響,而在這其中如何準確、可靠地探測出相位觀測量中的周跳最為關鍵[15]。由于衛星信號失鎖、接收機硬件以及各種環境因素的影響,在實際觀測量中周跳和觀測噪聲是同時存在的,當觀測噪聲較大時,會將小的周跳掩蓋,結果就會出現一定偏差,因此有效的探測與修復周跳來獲得質量良好的觀測值是進行參數求解的重要前提[23]。PANDA軟件采用的清除周跳的方法是基于Blewitt提出的TuiboEdit方法[21]的改進,利用雙頻雙P碼組合觀測值修復周跳。在軟件非差定位中,不考慮測站之間的相關性,待估參數主要有接收機三維坐標、接收機鐘差、對流層延遲參數、電離層參數以及模糊度等[24]。參數估計是精密單點定位的關鍵,參數估計的方法直接影響到定位處理的精度和效率。PANDA軟件的參數估計模塊包括均方根信息濾波[25]和最小二乘兩個估計器,利用新的模糊度參數來估計被探測到但未被修復的周跳。均方根信息濾波包括前向均方根信息濾波器(SRIF)和后向均方根信息平滑器(SRIS),SRIF具有較高的數值穩健性和計算高效性,能有效克服濾波器的發散,SRIS能夠估計隨機過程(如鐘差,對流層延遲,大氣阻力系數等)參數,適合于觀測數據實時處理[26]。而最小二乘估計器主要應用于事后處理,這有利于節省計算時間和基于觀測值殘差的數據再編輯。圖1示出了PANDA軟件精密單點定位的處理流程。
2 實驗結果及分析
2.1 觀測數據
實驗采用了SDCORS網的觀測數據,該系統整合了山東省已建CORS站點,構成了全省統一的高精度、高時空分辨率、高覆蓋率、實時快速的衛星定位連續運行綜合應用服務網,是“數字山東”的空間信息基礎設施之一[27]。SDCORS系統自運行以來,截止目前在網運行的參考站數達到157個,可以兼容拓普康、天寶、徠卡等GPS廠商的軟硬件。CORS網中各測站的觀測采樣間隔為30 s。為了驗證PANDA軟件精密單點定位的精度以及在不同影響因素條件下對定位精度的影響,選取SDCORS網2012年年積日001到007第一周的觀測質量良好的81個站的觀測數據,進行靜態精密單點定位處理。
2.2 精密單點定位
利用PANDA軟件的精密單點定位模塊,將這81個站的觀測數據O文件以及從IGS上下載的星歷、鐘差等文件導入軟件進行靜態精密單點定位處理。通過軟件對5°、10°、15°、20°、25°、30°、35°、40°等不同衛星截止高度角閾值的設置;對NMF/GMF/CFA等不同對流層映射函數的選取;對精密星歷和鐘差與快速星歷和鐘差的采用;對不同時長的連續觀測數據的采用,分批次進行處理得到精密單點定位的結果。這里,將SDCORS數據自動化處理及分析系統所提供的2012年各測站坐標的年解作為參考值。由于該系統綜合了GAMIT/GLOBK和BERNESE兩大高精度的GPS數據處理軟件,并利用2012年整年的觀測數據進行處理,所得到的各測站坐標的精度和可靠性都能滿足參考需要,所以采用該系統提供的坐標值作為參考值。通過將實驗精密單點定位處理得到的定位結果和參考坐標進行比較,來分析PANDA軟件精密單點定位的精度以及不同影響因素對定位精度的影響。
如圖2所示,將衛星截至高度角閾值設置為10°、對流層映射函數采用GMF、利用精密星歷和鐘差進行PPP處理時,所獲得81個測站連續7日單天解的平均值與參考坐標比較的統計結果。其中dx、dy、dz分別表示為各測站在X、Y、Z三個方向上的坐標差值,M為綜合三個方向的點位誤差。
從圖2可知,在X、Y、Z三個方向上所有測站平均的坐標差值分別為0.26 cm、-0.71 cm、-0.54 cm,綜合三方向點位誤差M為1.24 cm.各方向較差和綜合三個方向點位誤差均在2 cm以內,這從一方面證明了PANDA軟件的PPP精度與國際先進軟件水平相當。所有測站各方向最大坐標差值為1.70 cm,最小坐標差值為-2.25 cm,均在±3 cm以內。并且從圖2可以看出在總體趨勢上,各方向坐標差值有所波動,但波動幅度較小,精度相差不大。這主要是由軟件采用誤差模型改正精度的影響產生的。從一方面也說明了PANDA軟件的PPP結果比較穩定,可靠性較好。
如表1所示為分別采用5°~40°每間隔5°的不同衛星截止高度角閾值設置,利用精密星歷和鐘差以及GMF對流層映射函數,對81個測站連續一周的觀測數據進行PPP處理。將解算得到的所有測站連續7日單天解的平均值與參考坐標作差,再對所有測站的綜合三個方向點位誤差進行統計的。統計結果顯示,當衛星截止高度角設置為10°時,所有測站點位誤差均值和中誤差RMS值分別為1.19 cm和1.35 cm,均在2 cm以內。當高度角設置逐漸減小或增大時,點位誤差均值和中誤差RMS值也逐漸增大,且當衛星高度角增大時尤為明顯。可以看出當高度角為10°左右時,軟件的定位精度最高;當高度角超過25°時,最大點位誤差超過5 cm,點位誤差均值和中誤差RMS值也都超過2 cm,定位精度明顯變差,已經不能滿足精密單點定位的精度要求。這是由于當衛星截止高度角降低時,觀測到的衛星數目雖然有所增多,但是多路徑效應和周跳會明顯增加;衛星高度角升高時,雖然多路徑效應和周跳的影響變小,但可見衛星數目也在減少,使得觀測數據結構變差。兩種情況都會使得定位精度降低。
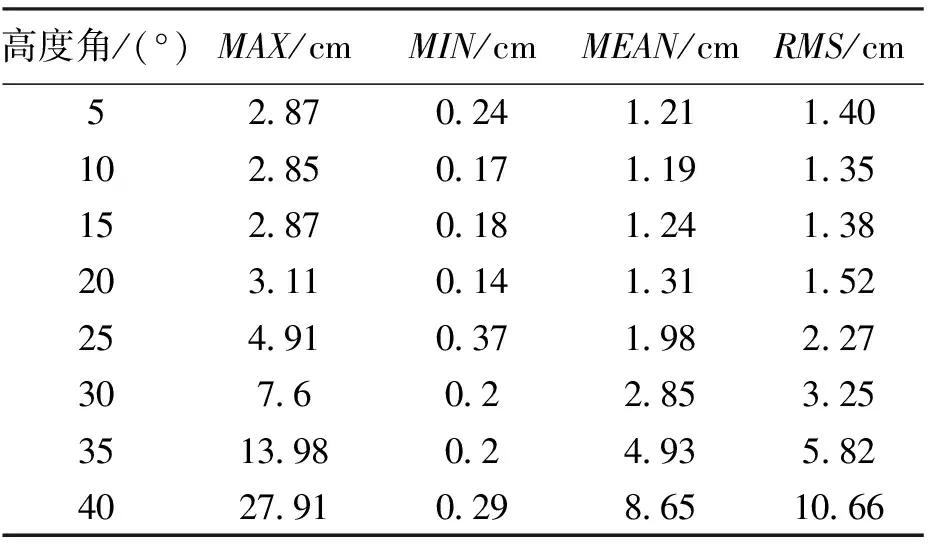
表1 不同高度角設置時精密單點定位結果精度對比
衛星截止高度角設置為10°,采用精密星歷和鐘差,分別利用CFA、NMF、GMF三種對流層映射函數,對81個測站一周觀測數據進行PPP處理。將解算得到的各測站7日單天解分別與參考坐標作差,并計算出綜合各方向點位誤差,再對每天所有測站平均的點位誤差進行統計。如圖3所示,從圖3可知,三種映射函數對精密單點定位結果精度的影響差別并不大,平均點位誤差相差均在3 mm以內。其中GMF模型的定位精度相對最好,CFA次之,NMF再次之。CFA模型是由Marin連續性映射函數改進得來的,其系數式是從雙層射線跟蹤分析得出的。NMF 模型是根據北半球一年中的電波資料所建立的,由于缺乏其他的客觀數據,所以該經驗模型的模擬過程顯得過于簡單。而GMF 模型是采用數值天氣模型(NWM)提供的高精度全球對流層折射率來解算延遲量,其參數是建立WCMWF(歐洲中期天氣預報中心)提供的氣壓、溫度和濕度等分析數據基礎上,基于三維大氣場數據內插得到的,并且考慮到測站經度對解算的影響的氣象模型,所以精度要優于另外兩種模型。并且,三種對流層映射函數的定位平均點位誤差均在3 cm以內,總體上變化趨勢相似,這不僅反映了該軟件具有較高的精密單點定位精度,而且定位結果也具有較好的穩定性,這與PANDA軟件逐歷元建立觀測方程有關。
衛星截止高度角設置為10°,采用GMF映射函數,分別利用IGS提供的精密星歷、鐘差產品和快速星歷、鐘差產品,對測站進行PPP處理,將解算結果進一步計算得到所有測站7日單天解的綜合三方向點位誤差,再將每天所有測站平均的點位誤差進行統計,圖4示出了統計結果。從圖4可以看出,使用兩種產品的解算結果相差不大,存在幾個毫米的偏差,精度在同一量級。但利用精密星歷、鐘差的解算精度比快速星歷、鐘差的解算精度要高,整體都在2 cm以內。這是由于IGS給出的兩種產品的精度和采樣率指標雖然相同,但時延和更新率不同,而且最終產品是綜合了全球7個IGS分析中心的解算結果,因此最終產品的精度和可靠性要高于快速產品。
當衛星截止高度角設置為10°,采用精密星歷和鐘差,利用GMF映射函數時,分別采用81個測站年積日002的,從0 h開始每增加2 h的不同時長觀測數據進行PPP處理。將得到的每個觀測時長的所有測站平均的點位誤差進行統計,圖5示出了統計結果。從圖5可以看出,Z方向的定位精度相對較好,要優于其他兩個方向。觀測數據的時長越長,定位的精度也就越高。當觀測時長少于10 h時,軟件的PPP定位精度較差,平均中誤差大于3 cm;當觀測數據時長超過18 h時,定位精度才能得到保證,點位平均中誤差小于2 cm.因此,利用PANDA軟件進行靜態精密單點定位處理時,要保證觀測數據時長大于18 h.
3 結束語
利用PANDA軟件進行靜態精密單點定位時,解算結果的精度較高,穩定性和可靠性也較好。并且從實驗結果可以看出PANDA軟件的精密單點定位結果存在著一定的系統性偏差,這主要是由于對流層延遲以及其他誤差的影響。因此,仍需要對這些誤差改正模型進行進一步研究。此外,衛星截止高度角的選取對軟件精密單點定位的精度有著較大影響,這是由于當衛星截止高度角過低時,受多路徑影響嚴重,觀測數據噪聲較大;當衛星截止高度角過高時,會過濾掉部分衛星,使得有效觀測數據減少[28]。在實際數據處理過程中,當衛星高度角在10°左右時,定位精度最高,當衛星高度角減小或增大時,相應的定位精度也會降低。而利用不同對流層映射函數進行PPP處理則有著不同的定位精度。在CFA、NIEL、GMF三種映射函數中,采用GMF模型的定位精度相對較好。使用最終產品和快速產品的精密單點定位解算結果有所差別,但精度在同一量級,其中最終產品的精度和可靠性要高于快速產品。利用PANDA軟件進行PPP處理時,觀測數據時長對定位的精度有一定影響,一般當觀測數據時長超過18 h,才能保證軟件單天解的精度。所以,在利用PANDA軟件進行靜態精密單點定位時,選擇合適的衛星高度角、合適的對流層映射函數、利用精密星歷和鐘差以及采用適宜時長的觀測數據時,會得到較高的定位精度。
[1] KOUBA J,HEROUX P.Precise point positioning using IGS orbit and clock products[J].GPS Solutions,2001,5(2):12-28.
[2] 姜衛平,鄒璇,唐衛明.基于CORS網絡的單頻GPS實時精密單點定位新方法[J].地球物理學報,2012,55(5): 1549-1556.
[3] 魯洋為,王振杰. Bernese 5.0軟件下的精密單點定位精度分析[J].測繪通報,2016,(2): 22-25.
[4] 周超. 基于GPS/BDS融合的精密單點定位及精度分析[J].全球定位系統,2016,41(2):92-95.
[5] 孟祥廣,郭際明.GPS/GLONASS 及其組合精密單點定位研究[J].武漢大學學報(信息科學版),2010,35(12): 1409-1413.
[6] 蔡昌盛,朱建軍,戴吾蛟,等.GPS/GLONASS組合精密單點定位模型及結果分析[J].武漢大學學報:(信息科學版),2011,36(12): 1474-1417.
[7] 張小紅,郭斐,李星星,等.GPS/GLONASS 組合精密單點定位研究[J].武漢大學學報(信息科學版),2010,35(1): 9-12.
[8] 蔡昌盛,戴吾蛟,匡翠林,等.利用UofC消電離層組合的GPS/GLONASS精密單點定位研究[J].武漢大學學報(信息科學版),2012,37(7): 827-830.
[9] 劉站科,付文舉,黃觀文,等. GPS/GLONASS組合精密單點定位[J]. 測繪通報,2016(7):6-10.
[10] 李征航,黃勁松.GPS測量與數據處理[M].2版.武漢:武漢大學出版社,2010.
[11]HATCH R.Satellite navigation accuracy:Past,present and future[C]//The 8th GNSS Workshop,Korea, 2001.
[12]GAO YANG, CHEN KONGZHE. Performance analysis of precise point positioning using Real-time orbit and olockproducts[C]//The 2004 international symposium on GNSS/GPS,Sydney, 2004.
[13]張小紅,李星星.非差模糊度整數固定解PPP新算法及實驗[J].武漢大學學報(信息科學版),2010,35(6):657-660.
[14]安向東.GPS與北斗偽距單點定位性能對比分析[J].全球定位系統,2014,39(3):8-14.
[15]耿濤,趙齊樂,劉經南,等. 基于PANDA 軟件的實時精密單點定位研究[J]. 武漢大學學報(信息科學版),2007, 32(4):312-315.
[16]WEBB F H, ZUMBERG J F. An introduction to GIPSY/OASIS2II precision software for analysis of data from Global Positioning System [R]. Jet Propulsion Laboratory, California Institute of Technology, 1993.
[17]DACH R,HOGENTOBLER U,FRIDEZ P,eta1.Bernese GPS software version 5.0[M].Berne: University of Bern,2007.
[18]施闖,趙齊樂,樓益棟,等.衛星導航系統綜合分析處理軟件PANDA及研究進展[J].航天器工程,2009,18(4):64-70.
[19]肖根如,甘衛軍,殷海濤.GIPSY 軟件的GPS 數據處理策略及應用[J].地球物理學進展,2010,25 (4):1508-1515.
[20]方榮新,施闖.高采樣率GPS數據非差精密處理方法及其在地震學中的應用研究[D].武漢:武漢大學,2010.
[21]BLEWITT G.An automatic editing algorithm for GPS data[J].Geophysical Research Letters, 1990, 17(3):199-202.
[22]李國偉,郭金運,王書陽,等. 基于動態單點定位的GPS數據質量指標研究[J]. 山東科技大學學報(自然科學版),2013,32(3):89-94.
[23]郭金運,宗干,李旺,等.GPS單星單歷元模糊度與電離層延遲分類解算[J].山東科技大學學報(自然科學版),2015,34(1):54-60.
[24]譚爭光,郭金運,宗干,等. PANDA和BERNESE軟件的PPP比較分析[J]. 全球定位系統,2013, 38(5):60-64.
[25]GERALD J B. Factorization methods for discrete sequential estimation [M]. New York: Academic Press, 2006.
[26]趙齊樂,劉經南,葛茂榮,等. 用PANDA對GPS和CHAMP 衛星精密定軌[J].大地測量與地球動力學,2005,25(2):113-116.
[27]張海平,高士民,周長志,等.SDCORS系統測試與技術性能分析[J]. 全球定位系統,2013, 38(3):62-64.
[28]王楠,張郁. 衛星高度角對GPS測量精度的影響研究[J]. 武漢理工大學學報(信息與管理工程版),2012,34(5):562-564.
PANDA Static PPP Solutions with Different Strategies
XUE Yingjun1,GUO Jinyun1,MAO Jijun2,LIU Zhimin1
(1.CollegeofGeomatics,ShandongUniversityofScienceandTechnology,Qingdao266590,China; 2.ShandongProvincialInstituteofLandSurveyingandMapping,Jinan250102,China)
The data processing strategy of PANDA software precise point positioning are analyed,and using the GPS data of 81 stations in SDCORS network for the first week of 2012 to carry out the static precise point positioning. The single day solution of one week for each station are analysised,the accuracy and reliability of the software precise point positioning in Shandong area are verified.The effect of the precise point positioning accuracy on different satellite cut-off angle,different mapping function,different ephemeris products,different length of observation data are studied. The conclusion indicates that when the satellite cut-off angle is set to 10 degrees, using GMF mapping function, using the precise ephemeris and clock correction, observation data for more than 18 hours, PANDA software static precise point positioning accuracy can reach 2 cm.
PANDA; SDCORS network; Precise Point Positioning; satellite cut-off angle; mapping function; ephemeris and clock products
10.13442/j.gnss.1008-9268.2017.01.006
2016-09-21
國家自然科學基金(批準號:41374009); 國家科技基礎性工作專項(編號:2015FY310200); 山東省自然科學基金(批準號:ZR2013DM009)
P228.4
A
1008-9268(2017)01-0028-06
薛映俊 (1993-),男,碩士生,主要從事空間大地測量等研究。
郭金運 (1969-),男,博士、教授、博導,主要從事空間大地測量、海洋大地測量和物理大地測量。
聯系人: 薛映俊 E-mail:1720243832@qq.com