雙機協(xié)同無源定位的飛行試驗方法研究
2017-05-12 02:02:27侯玉宏
導航定位與授時 2017年3期
孟 超,侯玉宏,肖 妮
(中國飛行試驗研究院,西安 710089)
雙機協(xié)同無源定位的飛行試驗方法研究
孟 超,侯玉宏,肖 妮
(中國飛行試驗研究院,西安 710089)
分析了基于測向交叉定位的雙機協(xié)同無源定位原理,構建了誤差模型,給出了影響定位誤差的因素。并從雙機定位基線、目標機進入距離和目標機進入方位三個因素進行了雙機協(xié)同無源定位誤差的仿真。通過基于定位精度要求的試飛剖面設計,給出了兩種典型的雙機協(xié)同無源定位試飛航線,并給出試飛結果評估的方法和流程。
雙機協(xié)同;幾何精度因子;飛行試驗
0 引言
現(xiàn)代空戰(zhàn)中,常常不只是單機對單機的格斗,而是機群與機群之間的對抗。協(xié)同空戰(zhàn)是隨著現(xiàn)代戰(zhàn)斗機、機載電子系統(tǒng)、機載武器和航空系統(tǒng)的發(fā)展而出現(xiàn)的,它是指兩架或兩架以上戰(zhàn)斗機相互配合、相互協(xié)作、遂行空中戰(zhàn)斗任務的全新空戰(zhàn)樣式,并將成為未來機群作戰(zhàn)的基本樣式。其中雙機配合作戰(zhàn)就是協(xié)同空戰(zhàn)的一種主要形式,而雙機配合無源探測又是執(zhí)行作戰(zhàn)任務的首要階段,可以為后續(xù)的目標分配和戰(zhàn)術規(guī)劃提供重要的目標方位和距離信息。
雙機協(xié)同無源探測是基于交叉定位原理的,其對目標的定位誤差與目標相對于編隊飛機的幾何布局密切相關,在其他因素不變的情況下,不同組網(wǎng)態(tài)勢得到的定位精度是不同的,因此研究定位誤差與組網(wǎng)態(tài)勢的關系對于有效地試飛和評估這種協(xié)同定位能力是十分必要的。
1 雙機協(xié)同無源定位原理分析及誤差模型構建
1.1 基于測向交叉定位的雙機協(xié)同無源定位原理分析
雙機協(xié)同無源定位的原理是基于測向交叉定位,利用兩載機通過電子偵察(ESM)得到的目標相對于載機自身的測向線在空間相交,從而確定目標的位置。在二維平面上,取X軸的正方向為載機1到載機2的方向,載機1的坐標為(x1,y1),載機2的坐標為(x2,y2),目標輻射源的坐標為(xT,yT)。如果兩載機測得的來波到達方向角分別為θ1、θ2,2條方向射線就可以交于一點,該點即為目標的位置估計。雙機測向交叉定位原理如圖1所示。
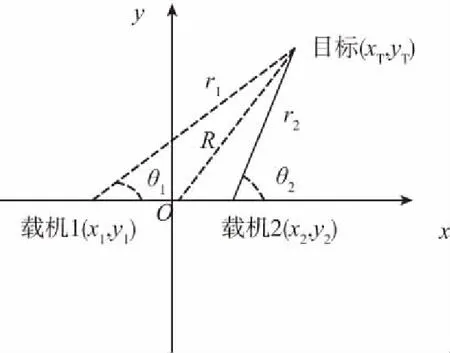
圖1 測向交叉定位原理圖Fig.1 Principle of direction-finding cross localization
根據(jù)圖1中的幾何關系可得:
(1)
將其寫成矩陣的形式為
AX=Z
(2)

由式(2)可以得到目標輻射源位置的解析解為
X=A-1Z
(3)
將這個矩陣展開,可以得到輻射源的位置估計:
(4)
根據(jù)雙機交叉定向的原理,由式(4)可知,在測得了兩載機的來波到達角后,還需要知道兩載機的位置信息,這樣建立一個統(tǒng)一的坐標系,然后根據(jù)式(4)的結果就可以計算出目標輻射源在此坐標系中的位置。但是當載機位置發(fā)生變化以后,還需要重新建立坐標系再進行計算。因此,雙機之間位置信息的共享是實現(xiàn)協(xié)同定位的基礎。
1.2 雙機協(xié)同無源定位誤差模型構建
由于實際測量過程中得到的角度θ1和θ2必然存在誤差,假定分別具有測角誤差δθ1和δθ2,這樣兩載機測向的交匯點會在一個不確定的模糊區(qū)域,如圖2所示。
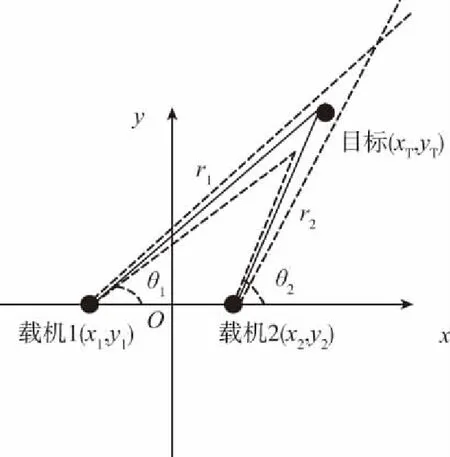
圖2 雙機測向交叉定位誤差示意圖Fig.2 Error of dual plane direction-finding cross localization
根據(jù)統(tǒng)計分析測向誤差服從均值為0的高斯分布,且兩機之間的測向誤差相互獨立,一般的雙機協(xié)同中采用的是同型機編隊,那么兩載機的測向精度完全相同,令σθ1=σθ2=σθ。雙機交叉定位誤差可表示為式(5)。
(5)
式中,r1和r2分別為目標機到兩載機間的距離。如圖2所建立的坐標系,兩載機的位置分別位于(-L,0)和(L,0)處,根據(jù)正弦定理,可以得到:
(6)
將式(6)代入式(5)中可以得到
(7)
由式(7)就可以得到,定位誤差除了與測向誤差有關外,定位基線和三角形的形狀對定位誤差起到放大的作用。幾何精度因子就是由幾何位置關系決定的,對定位誤差起放大作用的因子,在這里可以定義為
(8)
在試飛中,一般采用相對定位誤差來衡量無源定位系統(tǒng)的定位精度,因此在本文中,采用相對定位誤差的幾何精度因子,即幾何精度因子與目標距離的比值,如式(9)。
(9)
2 幾何精度因子仿真
依據(jù)雙機協(xié)同無源定位原理和誤差模型,相對定位誤差的幾何精度因子由定位基線(L)、目標距離(R)、目標方位(θ1、θ2)三個因素決定。為了設計合理的試飛態(tài)勢,必須了解三個因素對幾何精度因子的影響程度,但各因素之間不是相互獨立的,存在復雜的相關性,因此不適合采用解析的方法進行分析,本文通過計算機仿真的方式,從三個方面重點分析。
2.1 定位基線對幾何精度因子的影響仿真
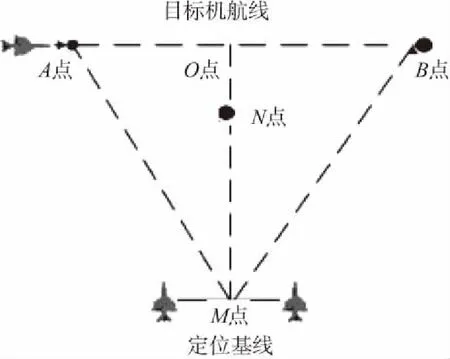
進行定位基線對幾何精度因子的影響仿真時,設定的態(tài)勢如圖3所示,目標機位于雙機編隊的中垂線上,距離固定為xkm,定位基線從y1km~y2km(y1 圖3 定位基線仿真示意圖Fig.3 Simulation of baseline in dual location 圖4 幾何精度因子與定位基線的關系(y1 圖5 目標進入距離仿真示意圖Fig.5 Simulation of the distance of target plane getting into 2.2 目標機進入距離對幾何精度因子的影響仿真 圖6 幾何精度因子與目標機進入距離的關系(x1>x2)Fig.6 Relation between GDOP and the distance of target plane getting into 進行目標機進入距離對幾何精度因子的影響仿真時,設定的態(tài)勢如圖5所示,定位基線為ykm固定不變,目標機位于雙機編隊的中垂線上,目標機距離由遠及近,從x1km~x2km(x1>x2)變化,步長10km。仿真結果如圖6所示。從仿真結果可以看出,隨著目標機距離的減小,幾何精度因子直線改善,當目標機距離小于定位基線后,幾何精度因子稍有變壞,會導致定位誤差變大。 2.3 目標機進入方位對幾何精度因子的影響仿真 進行目標機進入方位對幾何精度因子的影響仿真時,設定的態(tài)勢如圖7所示,定位基線為ykm固定不變,目標機距離為xkm固定不變,目標機的進入方位從-60°~60°變化,步長5°。仿真結果如圖8所示,從仿真結果可以看出,幾何精度因子與目標機進入方位呈拋物線關系,目標機迎頭進入幾何精度因子最佳,偏離越大幾何精度因子越差,20°以內較穩(wěn)定,大于20°以后惡化劇烈。 圖7 目標機進入方位仿真示意圖Fig.7 Simulation of the azimuth of target plane getting into 圖8 幾何精度因子與目標進入方位的關系Fig.8 Relation between GDOP and the azimuth of target plane 經(jīng)過上述分析和仿真,定位基線、目標距離和目標方位對幾何精度因子的影響基本明晰,可用于指導試飛方案規(guī)劃,設計合理的試飛剖面。 3.1 試飛剖面設計 根據(jù)定位精度要求,對應不同的幾何精度因子等級,分別是一級(GDOP>6)、二級(3 態(tài)勢一:假定目標機正迎頭進入,就可以構建定位基線和目標機進入距離的態(tài)勢圖,不同的目標機進入距離和我機編隊基線就構成了不同級別定位等級,如圖9所示。圖9中,基線1<基線2<…<基線5,目標機進入距離x1 圖9 定位等級態(tài)勢圖(距離-基線)Fig.9 State map of location level(distance-baseline) 態(tài)勢二:假設我機編隊基線不變,目標機從旁站進入,構建目標機進入距離和進入方位的態(tài)勢圖,如圖10所示,不同的目標機進入距離和進入方位就構成了不同級別的定位等級。 圖10 定位等級態(tài)勢圖(距離-方位)Fig.10 State map of location level(distance-azimuth) 基于態(tài)勢一設計試飛剖面,假定幾何精度因子要求為4~5,如圖9中的紅色區(qū)域。根據(jù)目標機進入距離,以及圖9中給出的定位等級態(tài)勢圖,實時調整我機編隊的定位基線,即可將定位精度控制在任務要求的范圍內。雙機協(xié)同定位“距離-基線”典型試飛航線如圖11所示,目標機從xkm進入,雙機ykm編隊,隨著目標機距離的接近,雙機編隊基線逐漸減小。 圖11 “距離-基線”典型試飛剖面Fig.11 Typical flight-test profile of distance-baseline 基于態(tài)勢二設計試飛剖面,假定幾何精度因子要求為4~5,根據(jù)目標機進入方位,尋找滿足定位精度要求的區(qū)域,目標機距離xkm旁站進入,雙機ykm編隊,目標機由A點向O點飛行,雙機編隊由M點向N點飛行,雙機編隊的速度和目標機速度保持基本同步,可實現(xiàn)有效定位。目標機由O點飛至B點的過程中,雙機編隊由N處返回至M點。而后,目標機從B點飛至O點,雙機由M點處再次進入。 圖12 “距離-方位”典型試飛剖面Fig.12 Typical flight-test profile of distance-azimuth 3.2 試飛數(shù)據(jù)處理 盡管在試飛剖面設計時,充分考慮了幾何精度因子,但在實際的飛行過程中,目標機和我方編隊飛機的位置關系動態(tài)變化。由于編隊飛機速度不匹配、位置誤差等因素,導致實際飛行軌跡與設計的試飛剖面存在偏差,因此需要對其幾何精度因子進行再次評估,按照不同的幾何精度因子對數(shù)據(jù)進行分組,考核其定位精度。 在雙機協(xié)同無源定位試飛時,需要記錄以下數(shù)據(jù): 1)編隊飛機和目標機的經(jīng)緯度信息; 2)單機輸出的探測結果(目標機方位); 3)雙機協(xié)同后輸出的目標機距離和方位。 試飛數(shù)據(jù)處理流程如圖13所示。 圖13 無源定位精度評估流程Fig.13 The flow chart of evaluating passive location precision accuracy 雙機協(xié)同無源定位的精度與雙機的編隊態(tài)勢以及目標機進入的方位和距離有著密不可分的關系,基于幾何精度因子對其進行詳細的分析,對于試飛剖面的設計以及試飛結果的評判都將起到重要的作用。關于試飛剖面的設計,本文僅給出了一種思路和兩種典型剖面,基于幾何精度因子理論,還可以設計更多的試飛剖面。在后續(xù)的研究中,關于雙機協(xié)同無源定位的試飛結果評估,也應基于幾何精度因子理論進行誤差分離,對設備本身的誤差和幾何關系引起的誤差分別進行評估。 [1] 孫仲康,周一宇,何黎星.單多基地有源無源定位技術[M].北京:國防工業(yè)出版社,1996. [2] 胡來招.無源定位[M].北京:國防工業(yè)出版社,2004. [3]XiuJJ,HeY.Constellationofmultisensorsinbearing-onlylocationsystem[J].IEEProceedings-RadarSonarandNavigation, 2005, 152(3):215-218. [4] 趙星辰,吳軍,彭芳,等.聯(lián)合空戰(zhàn)中一種基于雙機配合的無源定位方法研究[J].傳感器與微系統(tǒng),2012,31(6):18-21. [5] 王伯生,王芳.空基平臺無源定位的誤差推導與精度分析[J].航空計算技術,2012,42(3):89-91. [6] 朱劍輝,方洋旺,張平,等.雙機協(xié)同定位誤差分析的研究[J].電光與控制,2012,19(6):21-25. [7]LevanonN.LowestGDOPin2-Dscenarios[J].IEEProceedings-RadarSonarandNavigation, 2000, 147(3):149-155. [8] 王本才,張國毅,侯慧群.無源定位技術研究[J].艦船電子對抗,2006,29(6):20-26. [9]HOKC,XUW.AnaccuratealgebraicsolutionformovingsourcelocationusingTDOAandFDOAmeasurements[C].IEEETransactiononSignalProcessing,2004,52(9):2453-2463. [10]ChercharA,BelouchraniA,ChonavelT.Anewapproachtomaneuvringtargettrackinginpassivemultisensorenvironment[R].Passive, 2010. [11] 吳世文.機載無源定位系統(tǒng)的定位精度[J].電子信息對抗技術,1995(1):27-31. [12] 王建鋼,朱元清,毛五星.機載無源定位系統(tǒng)的多點定位及精度分析[J].空軍雷達學院學報,2003,17(3):28-30. [13] 王喜鵬,王飛.機載無源定位精度分析[J].艦船電子對抗,2012,35(3):23-26. [14] 王本才,何友,王國宏,等.雙站無源均值定位算法精度分析[J].四川兵工學報,2010,31(4):78-81. Research on Flight Test Method of Dual Plane Cooperative Passive Localization MENG Chao, HOU Yu-hong, XIAO Ni (Chinese Flight Test Establishment,Xi’an 710089,China) By analyzing the principle of dual plane cooperative passive location based on direction-finding cross localization, the error model is established, and factors affecting the position error are introduced.Computer simulation on the error of double collaborative passive location from three factors is conducted,including baseline in dual plane location, the distance and the azimuth of target plane.Through designing the flight profile based on positioning accuracy requirements, two typical flight routes of dual cooperative passive location are proposed, and the methods of evaluation and processing on test results are given. Double plane cooperative;Geometric precision factor;Flight test 10.19306/j.cnki.2095-8110.2017.03.008 2016-08-23; 2016-11-21 孟超(1984-),男,工程師,主要從事機載電子設備試飛方面的研究。E-mail:chaozi_meng@126.com V217 A 2095-8110(2017)03-0046-06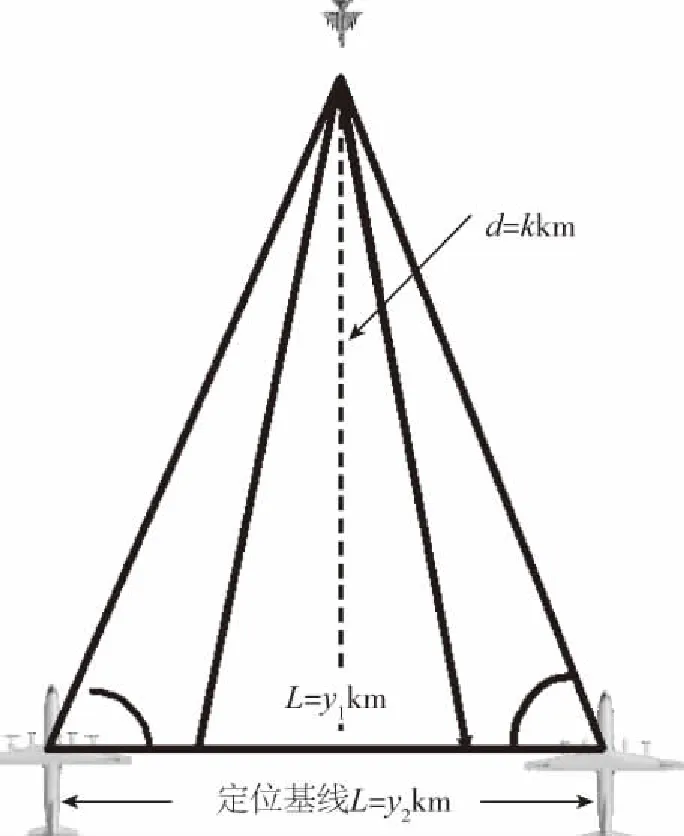


3 基于幾何精度因子的試飛方案設計



4 結束語