基于BP神經網絡的超磁致作動器建模與控制
2017-05-12 09:22:18王丹梅馮偉峰
現代計算機 2017年9期
王丹梅,馮偉峰
(西南交通大學電氣工程學院,成都 611756)
基于BP神經網絡的超磁致作動器建模與控制
王丹梅,馮偉峰
(西南交通大學電氣工程學院,成都 611756)
超磁致作動器的遲滯非線性是其應用的一大障礙,對此基于BP神經網絡建立超磁致作動器GMA的Hammerstein模型,在此模型基礎上,設計前饋逆補償與PID反饋控制相結合的復合控制策略。針對建模范圍內的所有單頻和復合頻率的輸入信號,控制器都能保證跟蹤控制效果。通過實驗實時跟蹤的結果進一步驗證建模和控制的效果。
遲滯非線性;超磁致作動器;BP神經網絡;Hammerstein模型
0 引言
基于磁致稀土,利用其能反應磁場變化作出形變的特性制作而成的執行器,稱為超磁致作動器(GMA, Giant Magnetostrictive Actuators),以棒狀結構的伸張縮反應磁場變化。由于超磁致作動器儲能效率高,遠高于鎳制品和壓電陶瓷,此外響應速度快,能夠及時以伸縮反應磁場。因此超磁致作動器常常應用在在微米級別的微位移精確控制領域中。但作動器表現出明顯的率相關性,難以得到精確模型、帶來控制效果變差等問題。
目前建模方法大致可以分為三種。根據超磁致物理作用機理的物理建模、根據系統輸入輸出的唯象建模、根據模擬人認知行為的智能方法建模。
對遲滯系統的控制方法,主要有逆補償控制、不直接求逆以及智能算法等方法,其中逆補償控制是最主要的方法。在反饋控制策略的研究中,如何使系統使用對象使用不確定性、滿足規定性能指標是學者常見研究方向。
1 超磁致作動器的建模與驗證
1.1 Hammerstein模型
由于率相關性系統直接建模不容易找到模型描述,本文使用Hammerstein建模思想,把系統拆分兩種有成熟控制方法的已知模型,這種方法可以描述大多數非線性系統。其中u、v分別為輸入、輸出,x是動態線性模塊輸入。

圖1 Hammerstein模型
Hammerstein模型的辨識可把前后兩個部分分別進行辨識。本文靜態部分采用BP神經網絡方法進行辨識,動態部分采用ARX(AutoRegressive eXogenous)模型。
1.2 BP神經網絡
神經網絡利用函數去逼近模型,屬于建模方法的智能方法建模類,通過大量數據的訓練過程,可以達到高精度的指標,使神經網絡建模方法能夠較好地描述超磁致作動器,方便控制。本文采用BP神經網絡建立超磁致作動器靜態非線性模型。
神經網絡只能逼近一對一映射或者多對一映射關系,而作動器的輸入與輸出之間具有多值映射關系,不能直接用神經網絡進行建模,因此本文采用基于擴展輸入空間的BP神經網絡模型,引入基本遲滯算子對輸入空間進行擴展,使神經網絡滿足一一對應的關系。
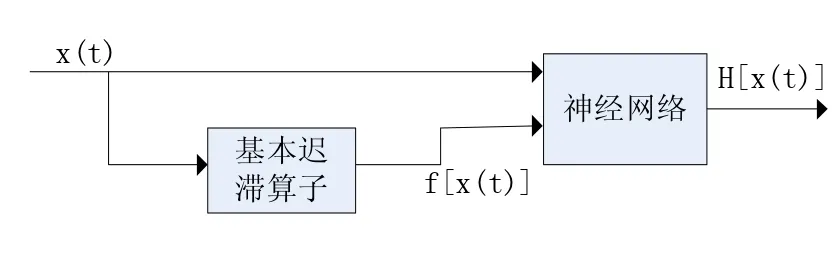
圖2 擴展空間輸入法建立神經網絡
1.3 基本遲滯算子
遲滯的多值映射性是其建模的難點之一。本文以不同閾值play算子作為基本單元構造算子[2-8]。
Play算子定義如下:

其中rh表示play算子的閾值。
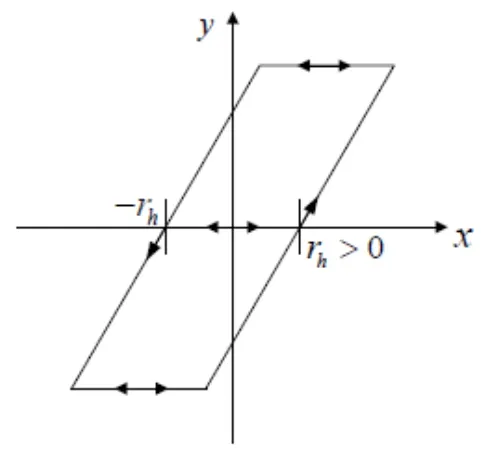
圖3 play算子
PI模型的表達式為:

其中wh表示play算子的權重。
算子輸出與執行器輸出使得模型輸入不再是多值,達到一一映射目的。
1.4 ARX模型
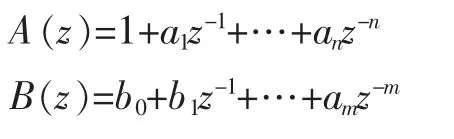
自回歸各態歷經模型是一種有理傳遞函數模型,廣泛用于系統的辨識,可用來描述壓電作動器的率相關特性。ARX數學表達式為:

其中ε(t)是誤差項,而:
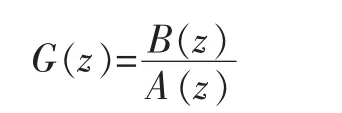
ARX模型傳遞函數為:
1.5 模型的驗證
以均方根誤差RMSE(Root Mean Square Error)和相對誤差RE(Relative Error)作為檢驗標準[11],對建模效果進行定量描述,表達式如下:
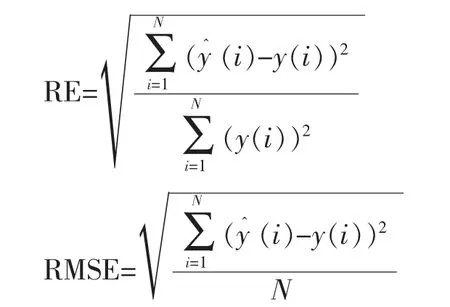
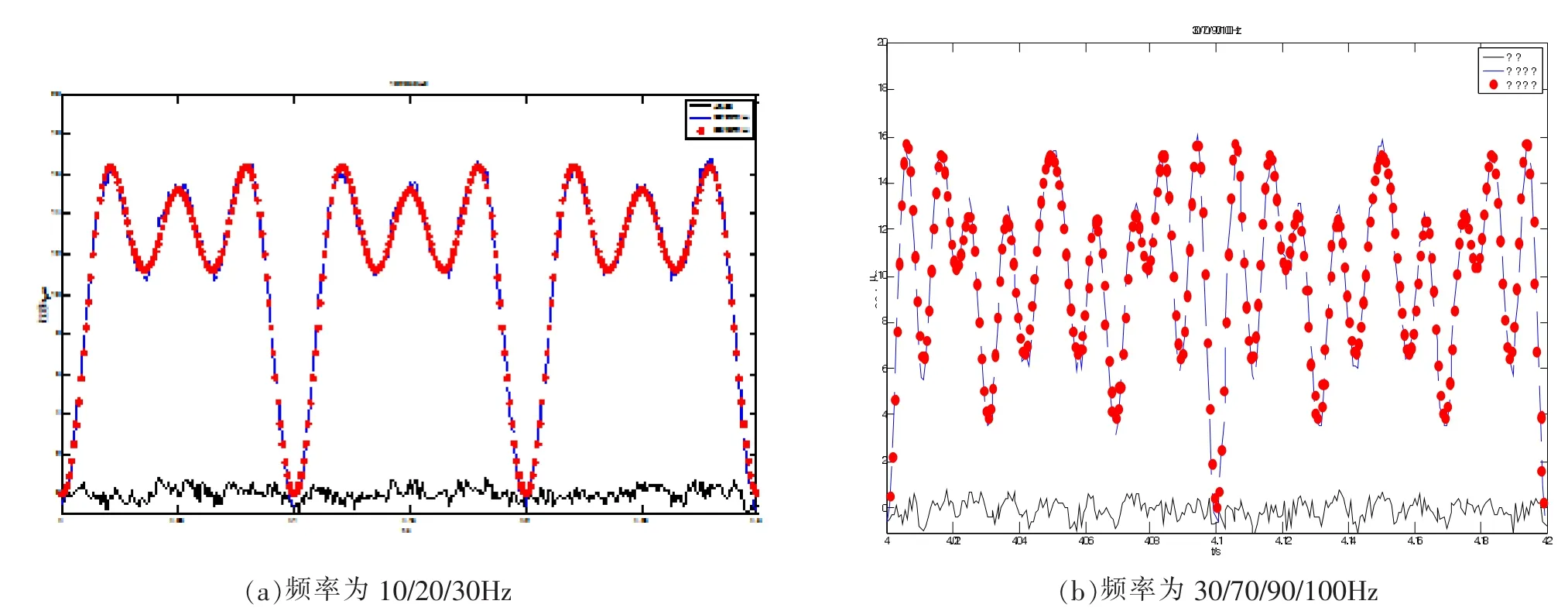
如圖4給出了不同頻率下建模結果與作動器輸出的對比圖。而誤差的RE與RMSE數值見表1。
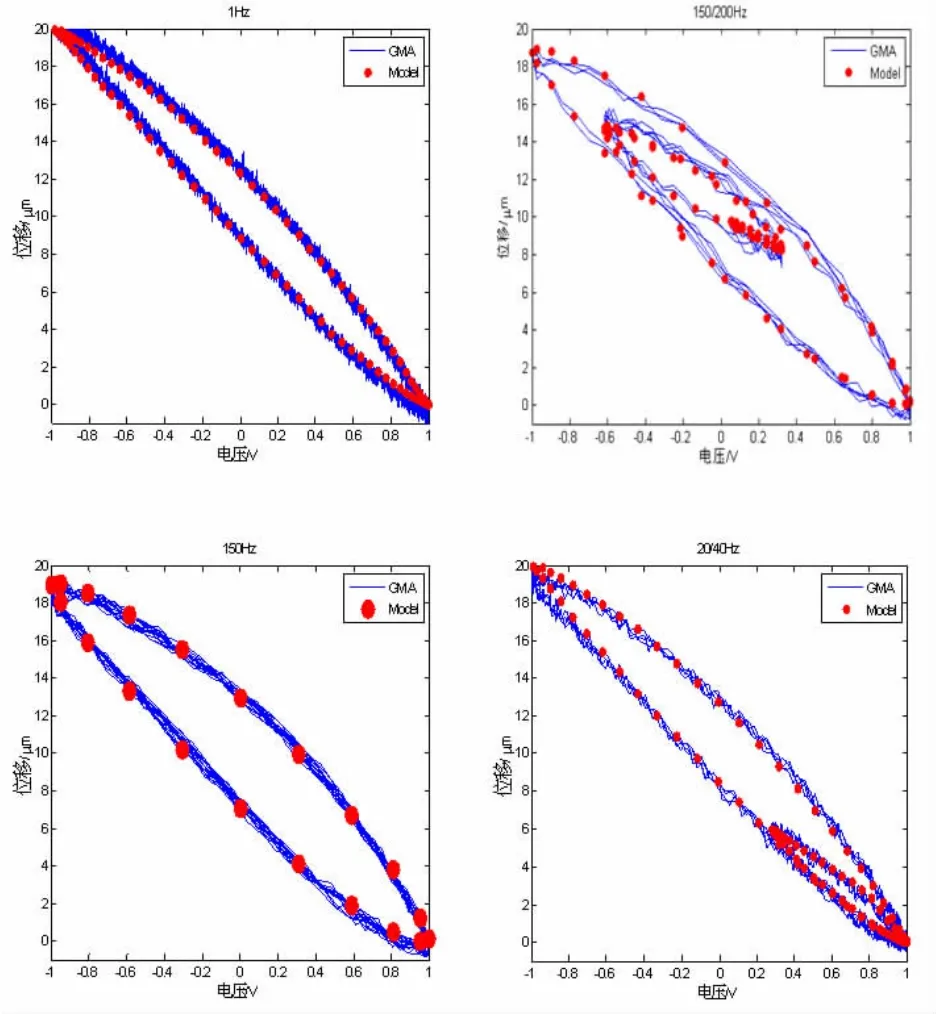
圖4 建模效果驗證
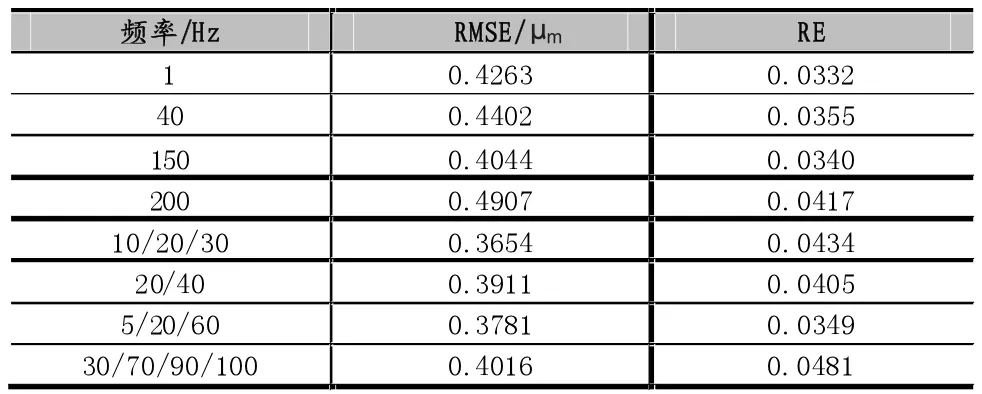
表1 建模驗證誤差
2 跟蹤控制策略及效果
2.1 控制器設計
控制系統結合Hammerstein分為兩部分,以傳統控制方法解決系統本身具有的復雜非線性構成。第一部分逆補償控制,抵消非線性的影響。第二部分PID控制器,彌補開環逆補償控制易受擾動等影響,校正系統的誤差。將兩者結合既可穩定性又可提高跟蹤性能,而且能夠達到實時控制的效果。
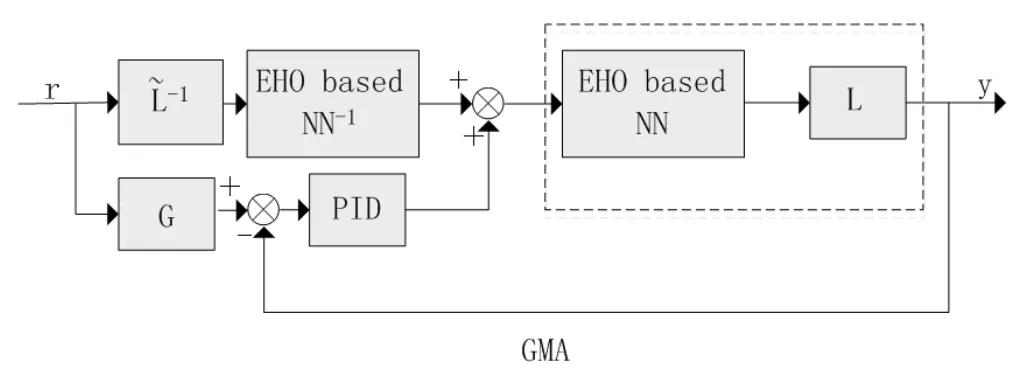
圖5 跟蹤控制器框圖
r和y分別為輸入信號和輸出信號,NN和NN-1為基于基本遲滯算子EHO構建的BP神經網絡模型及其逆模型,L為基于ARX建立的線性動態部分,為線性部分的近似逆,G為前饋補償器。
ARX辨識結果有:
因為L是嚴格正則的,不能直接求逆,取一個近似逆:
2.2 實時跟蹤控制實驗
實時跟蹤控制實驗,如圖6所示。實驗中所用器材包括半實物仿真平臺dSPACE、上位機、超磁致作動器、GF-20型功率放大器等。首先在上位機中設計好控制程序,下載至dSPACE后,經功率放大器放大后作用于作動器。以電渦流傳感器(靈敏度8mv/μm)測得超磁致作動器的位移信號,回傳給dSPACE,最后在上位機中進行數據分析和處理。
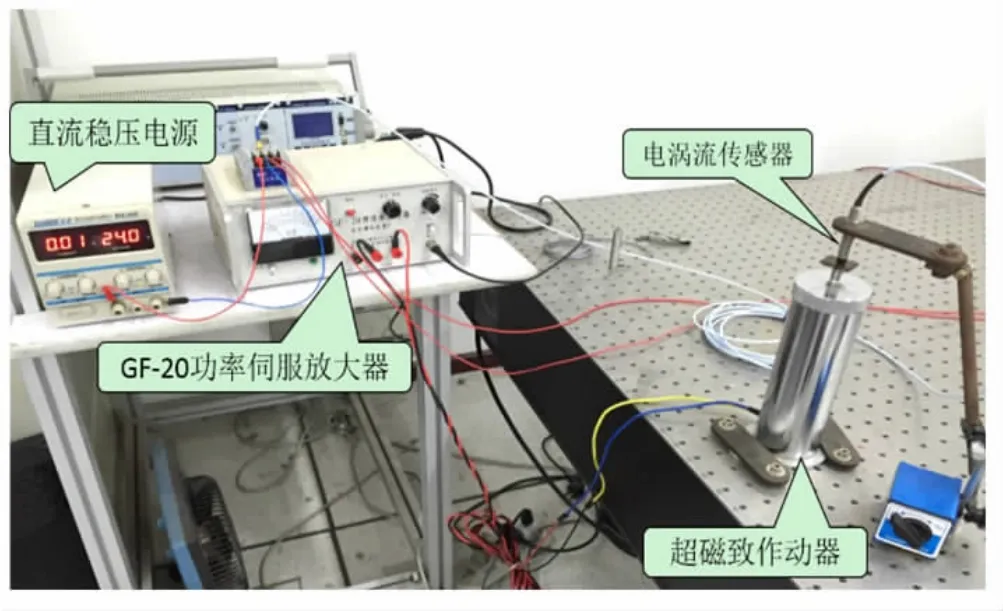
圖6 實時跟蹤實驗
根據設計好的控制策略,使超磁致作動器跟蹤1-200Hz范圍內的參考信號,包括單頻率和復合頻率。
圖7給出了幾組跟蹤效果對比圖,表2詳細給出了多種頻率輸入信號跟蹤控制的均方根誤差和相對誤差。
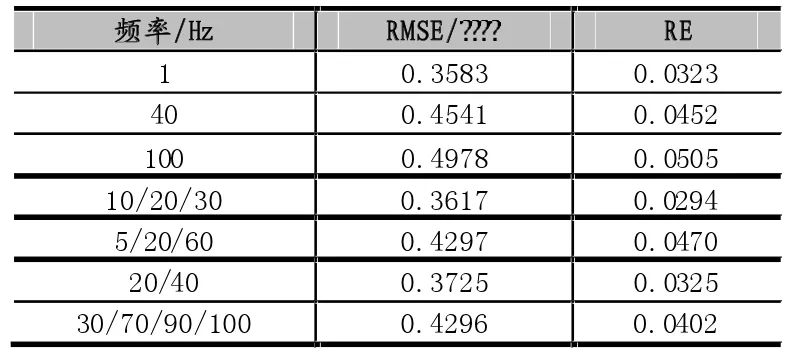
表2 跟蹤控制誤差
3 結語
本文以超磁致作動器(GMA)為研究對象,基于BP神經網絡建立了0-200Hz內的Hammerstein模型[1],并基于此模型設計了逆補償結合PID控制的跟蹤控制器。實驗結果顯示,該模型和控制器對單頻和復合頻率的輸入信號都適用。實時跟蹤實驗驗證了上述模型,能夠有效跟蹤不同頻率,包括復合頻率的信號。控制效果的均方根誤差小于0.5μm,相對誤差小于4.7%。
[1]毛劍琴.智能結構動力學與控制[M].科學出版社,2013.
[2]谷國迎.壓電陶瓷驅動微位移平臺的磁滯補償控制理論和方法研究[D].上海交通大學,2012.
[3]Knohl T,Unbehauen H.Adaptive Position Control of Electrohydraulic Servo Systems Using ANN[J].Mechatronics,2000,10(1-2): 127-143.
[4]柳萍,毛劍琴,張偉,等.基于Hammerstein-like模型的超磁致伸縮作動器建模與控制[J].北京航空航天大學學報,2013,39(7):17-921.
[5]毛劍琴,岳玉芳,張建剛,等.復雜系統模糊建模的模糊樹方法[J].控制理論與應用,2002,19(2):153-156.
[6]Tao G,Kokotovic P V.Adaptive Control of Plants with Unknown Hysteresis[J].IEEE Transactions on Automatic Control,1995,40(2):200-212.
[7]Liu J,Zhou K.Neural Networks Based Modeling and Robust Control of Hysteresis[C]Control Conference(CCC),2016 35th Chinese. TCCT,2016:3051-3056.
[8]Giri F.Block-Oriented Nonlinear System Identification[M].Berlin:Springer,2010.
[9]Zhao X,Tan Y.Modeling Hysteresis and Its Inverse Model Using Neural Networks Based on Expanded Input Space Method[J].IEEE Transactions on Control Systems Technology,2008,16(3):484-490.
[10]Kuhnen K.Modeling,Identification and Compensation of Complex Hysteretic Nonlinearities:A Modified Prandtl-Ishlinskii Approach [J].European journal of control,2003,9(4):407-418.
[11]范家華,周攀,郝兵兵,等.基于BP神經網絡的壓電作動器建模與控制[J].現代計算機,2016(8):35-39.
Modeling and Control of Giant Magnetostrictive Actuators Based on BP Neural Network
WANG Dan-mei,FENG Wei-feng
(College of Electrical Engineering,Southwest Jiaotong University,Chengdu 611756)
The hysteresis nonlinearity of the GMA is a major obstacle in the application of such material in actuators.Establishes a Hammerstein model based on the BP neural network to model the hysteresis nonlinearity.Based on the model,designs a composite control strategy combining feed-forward compensation and PID feedback control.The controller ensures tracking control for all single and complex frequency input signals within the modeling range.Finally,the results of the real-time tracking experiment on GMA further validate the modeling and control results.
Hysteresis Nonlinearity;Giant Magnetostrictive Actuators;BP Neural Network;Hammerstein Model
國家自然科學基金重點項目(No.61433011)
1007-1423(2017)09-0011-05
10.3969/j.issn.1007-1423.2017.09.003
王丹梅(1992-),女,四川資陽人,碩士研究生,研究方向為遲滯非線性系統建模與控制
2017-02-17
2017-03-10
馮偉峰(1991-),男,廣東佛山人,碩士研究生,研究方向為機器人控制
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
核科學與工程(2015年4期)2015-09-26 11:59:03
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
