無人機協(xié)同作戰(zhàn)仿真系統(tǒng)構(gòu)建與模型校驗
2017-05-10 13:30:40周維強
電子技術(shù)與軟件工程 2017年8期
周維強

摘 要
為適應(yīng)快速作戰(zhàn)戰(zhàn)場環(huán)境、提高短時作戰(zhàn)效率,充分發(fā)揮無人機在戰(zhàn)場上的應(yīng)用價值,構(gòu)建基于HLA/RTI標(biāo)準(zhǔn)體系結(jié)構(gòu)的無人機協(xié)同作戰(zhàn)仿真系統(tǒng)。通過仿真模型校驗,驗證無人機協(xié)同作戰(zhàn)系統(tǒng)的完備性、合理性、正確性。
【關(guān)鍵詞】無人機協(xié)同作戰(zhàn) HLA/RTI標(biāo)準(zhǔn)體系 信息保障 模型校驗
1 概述
依托數(shù)字戰(zhàn)場環(huán)境,通過構(gòu)建無人機協(xié)同作戰(zhàn)仿真系統(tǒng),規(guī)劃典型戰(zhàn)場環(huán)境、作戰(zhàn)任務(wù),形成以作戰(zhàn)平臺為主、傳感器、數(shù)據(jù)鏈及武器模型為輔的信息交互關(guān)系,對基于無人機信息保障的協(xié)同對地打擊流程進行仿真試驗研究,并對仿真系統(tǒng)進行模型校驗,能夠驗證無人機協(xié)同作戰(zhàn)系統(tǒng)的完備性,便于快速分析無人機信息保障流程的合理性、可行性。
2 無人機協(xié)同作戰(zhàn)系統(tǒng)結(jié)構(gòu)設(shè)計
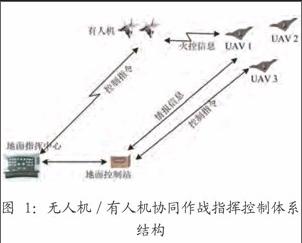
當(dāng)前偵察型無人機作戰(zhàn)是以“地面控制站”為中心的使用方式,先將偵察情報信息發(fā)送給地面控制站,由地面控制站進行分發(fā)與處理,再把情報信息發(fā)送給打擊平臺,整個過程環(huán)節(jié)多、耗時長,獲取的情報信息將嚴(yán)重滯后于戰(zhàn)場變化,不能直接提供給打擊裝備,不具備發(fā)現(xiàn)即打擊的能力,對于稍縱即逝的戰(zhàn)場目標(biāo)將失去交戰(zhàn)時機。為了充分發(fā)揮無人機的偵察能力,應(yīng)當(dāng)使無人機能夠及時直接為空中作戰(zhàn)平臺提供火力信息保障,建立基于無人機信息保障的無人機/有人機協(xié)同作戰(zhàn)系統(tǒng),實現(xiàn)對時敏目標(biāo)的快速精確打擊的需求。
無人機/有人機協(xié)同作戰(zhàn)系統(tǒng)針對的是典型的時間敏感目標(biāo)打擊,有人機需在有限的時間窗口內(nèi)完成打擊閉環(huán)。而針對此類低動態(tài)時敏目標(biāo),有人機對目標(biāo)指示信息的時效性、數(shù)據(jù)頻率和精度等要求都有大幅提高,方能實現(xiàn)“發(fā)現(xiàn)即打擊”,可通過武器協(xié)同數(shù)據(jù)鏈實現(xiàn)無人機與有人機的直接交聯(lián)。由無人機實時向有人機提供高精度的目標(biāo)指示信息,輔助有人機進行火控解算和武器控制,完成對地面低動態(tài)時敏目標(biāo)的精確打擊。基于無人機信息保障的無人機/有人機協(xié)同作戰(zhàn)系統(tǒng)的指揮控制體系結(jié)構(gòu)如圖1所示。
通過建立無人機火控信息保障鏈條,提高目標(biāo)定位信息進入作戰(zhàn)飛機火控系統(tǒng)的時效性,可實現(xiàn)減少全系統(tǒng)反應(yīng)時間,提高武器作戰(zhàn)效能,實現(xiàn)“發(fā)現(xiàn)即打擊”的目的。
3 仿真系統(tǒng)構(gòu)建
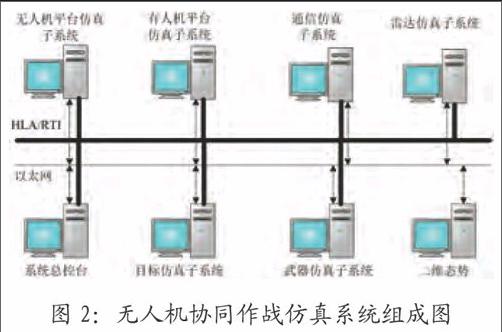
為建立基于無人機信息保障的無人機/有人機協(xié)同作戰(zhàn)系統(tǒng),無人機協(xié)同作戰(zhàn)仿真系統(tǒng)環(huán)境采用基于HLA/RTI標(biāo)準(zhǔn)體系結(jié)構(gòu)的方式構(gòu)建,主要由系統(tǒng)總體控制管理模塊、無人機平臺仿真模塊、有人機平臺仿真模塊、通信仿真模塊、目標(biāo)仿真模塊、雷達仿真模塊、武器導(dǎo)彈仿真模塊以及二維態(tài)勢顯示仿真模塊共八個仿真模塊組成。仿真系統(tǒng)能夠支持多種仿真作戰(zhàn)想定流程的切換,通過XML文件實現(xiàn)作戰(zhàn)想定場景的離線加載,實現(xiàn)無人機協(xié)同作戰(zhàn)系統(tǒng)流程的仿真驗證。仿真系統(tǒng)組成如圖2所示。
3.1 系統(tǒng)總控臺
在無人機協(xié)同作戰(zhàn)仿真系統(tǒng)中,系統(tǒng)總控臺負責(zé)實現(xiàn)無人機協(xié)同作戰(zhàn)仿真系統(tǒng)的作戰(zhàn)想定腳本錄入及下發(fā)、仿真過程管控、仿真系統(tǒng)狀態(tài)監(jiān)控、仿真數(shù)據(jù)記錄與回放等功能。
3.1.1 作戰(zhàn)想定錄入及下發(fā)
作戰(zhàn)想定錄入功能主要完成仿真系統(tǒng)仿真想定腳本文件的創(chuàng)建、編輯、修改、保存和下發(fā)等功能。
在仿真開始階段,通過仿真想定錄入功能在xml文件中設(shè)置紅藍雙方的兵力部署、禁飛區(qū)等,作為情報獲取的基本輸入。并對紅方兵力進行預(yù)先任務(wù)規(guī)劃,規(guī)劃出紅方兵力在作戰(zhàn)過程中的任務(wù)載荷和任務(wù)序列,以xml格式的進行保存,作為仿真中紅方的作戰(zhàn)想定腳本。在各仿真子系統(tǒng)均加入HLA/RTI聯(lián)邦運行環(huán)境后,通過交互接口實現(xiàn)想定腳本的下發(fā)。
3.1.2 仿真啟動/停止
在完成作戰(zhàn)想定腳本下發(fā)后,在仿真管理控制界面上通過管控指令下發(fā),將啟動命令發(fā)送到各個仿真子系統(tǒng),各個子系統(tǒng)解析作戰(zhàn)想定腳本后,根據(jù)作戰(zhàn)想定腳本完成各自的初始化后,開始按照時間步長進行推進,進入仿真運行階段。
在系統(tǒng)運行過程中,若需要停止仿真系統(tǒng)的運行,則發(fā)送仿真中止指令,各個子系統(tǒng)接收到此命令后,退出仿真系統(tǒng)。
3.1.3 仿真暫停/恢復(fù)
在仿真過程中,如果需要暫停仿真系統(tǒng)的運行,可以通過仿真管理控制界面發(fā)送暫停指令,各個子系統(tǒng)接收到暫停消息后,分別處于暫停運行狀態(tài),只發(fā)送心跳消息,維持系統(tǒng)健康狀態(tài);在系統(tǒng)暫停后,若恢復(fù)系統(tǒng)的運行,則發(fā)送系統(tǒng)恢復(fù)運行命令,各個子系統(tǒng)接收到恢復(fù)運行消息后,進入正常運行模式,繼續(xù)運行仿真。
3.1.4 系統(tǒng)狀態(tài)監(jiān)控
該功能用來監(jiān)測各子系統(tǒng)是否正常運行。各子系統(tǒng)通過以太網(wǎng)與系統(tǒng)總控臺相連,周期性向系統(tǒng)總控臺發(fā)送心跳數(shù)據(jù)包,系統(tǒng)總控臺根據(jù)心跳數(shù)據(jù)確認各子系統(tǒng)的健康狀況,并通過人機交互界面在線統(tǒng)計各軟件狀態(tài)信息、顯示仿真運行過程以及仿真管控的消息報文等。
3.1.5 數(shù)據(jù)記錄與回放
通過RTI數(shù)據(jù)交互接口實時訂購各仿真子系統(tǒng)與系統(tǒng)總控臺的交互信息,以及各子系統(tǒng)的成員信息(運動狀態(tài)),以文件形式存儲數(shù)據(jù),可導(dǎo)入指定數(shù)據(jù)庫,支持存儲文件查詢與回放,為系統(tǒng)場景再現(xiàn)回顧、事后評估提供數(shù)據(jù)源。
3.2 作戰(zhàn)平臺子系統(tǒng)
構(gòu)建作戰(zhàn)平臺仿真模型,實現(xiàn)對有人作戰(zhàn)飛機、無人偵察飛機的屬性特征、基本行為和作戰(zhàn)能力的模擬。平臺模型接收想定文件的配置參數(shù),根據(jù)規(guī)劃路徑或給定的任務(wù)或指令運動,按設(shè)定的節(jié)拍周期性的處理和更新機動狀態(tài)(位置、速度等),產(chǎn)生運動狀態(tài)信息。
3.2.1 有人作戰(zhàn)飛機平臺子系統(tǒng)
在仿真過程中,有人作戰(zhàn)飛機按照任務(wù)規(guī)劃的航路點飛行至投彈點,投放精確制導(dǎo)武器對地面低動態(tài)目標(biāo)實施攻擊,完成在線任務(wù)規(guī)劃、火控解算、武器控制等功能仿真。有人機平臺子系統(tǒng)主要由毀傷計算模塊、飛行決策模塊、飛行控制模塊、運動學(xué)模塊和火控解算模塊組成。
3.2.2 無人機平臺子系統(tǒng)
在仿真過程中,無人機在指定區(qū)域按預(yù)定航路飛行,偵察目標(biāo),并通過數(shù)據(jù)鏈向有人機、地面指揮所發(fā)送目標(biāo)偵察圖像、目標(biāo)指示信息。無人機平臺子系統(tǒng)主要由運動學(xué)模塊、目標(biāo)探測模塊、決策控制模塊組成。
3.3 目標(biāo)仿真子系統(tǒng)
建立地面目標(biāo)仿真模型,完成對地面低動態(tài)時間敏感目標(biāo)的仿真。該目標(biāo)設(shè)定為地面移動車輛。在仿真過程中,目標(biāo)車輛以20~80km/s的速度做勻速直線運動,當(dāng)來襲導(dǎo)彈擊中目標(biāo)后,目標(biāo)判斷自身毀傷情況并退出仿真。目標(biāo)仿真子系統(tǒng)主要由運動學(xué)模塊、毀傷判斷模塊組成。
3.4 雷達仿真子系統(tǒng)
建立無人機載預(yù)警雷達探測模型,輔助無人機完成目標(biāo)探測和跟蹤,根據(jù)雷達技術(shù)體制和工作模式產(chǎn)生目標(biāo)探測信息,并將目標(biāo)指示信息上報至相應(yīng)作戰(zhàn)平臺。雷達仿真子系統(tǒng)主要由探測區(qū)域判斷、探測距離計算、探測狀態(tài)判斷、探測信息輸出四個模塊組成。
3.5 武器仿真子系統(tǒng)
建立空地導(dǎo)彈仿真模型,接收作戰(zhàn)平臺產(chǎn)生的目標(biāo)裝訂信息和發(fā)射指令信息,完成導(dǎo)彈發(fā)射參數(shù)裝訂和發(fā)射控制;接收它平臺產(chǎn)生的目標(biāo)指示信息并實時更新導(dǎo)彈航路,完成導(dǎo)彈攻擊過程的模擬;根據(jù)導(dǎo)彈攻擊方式自主選擇爆炸點位置,并上報目標(biāo)毀傷情況。武器仿真子系統(tǒng)主要由導(dǎo)彈導(dǎo)引控制模塊、彈目運動學(xué)模型、導(dǎo)彈動力學(xué)和運動學(xué)模型組成。
3.6 通信仿真子系統(tǒng)
建立武器協(xié)同數(shù)據(jù)鏈通信仿真模型,模擬有人機、無人機之間的數(shù)據(jù)通信功能,統(tǒng)計數(shù)據(jù)傳輸量并顯示。在仿真過程中,根據(jù)有人機、無人機之間的距離判斷是否完成數(shù)據(jù)鏈組網(wǎng),并以一定的誤碼、漏組為有人機、無人機傳輸情報信息。通信仿真子系統(tǒng)主要由數(shù)據(jù)收發(fā)模塊、組網(wǎng)規(guī)劃模塊、網(wǎng)絡(luò)傳輸性能仿真模塊組成。
3.7 二維態(tài)勢顯示子系統(tǒng)
二維態(tài)勢顯示子系統(tǒng)采用電子地圖,動態(tài)、實時地顯示戰(zhàn)場實體運動態(tài)勢、通信態(tài)勢和交戰(zhàn)態(tài)勢。在仿真過程中,通過以太網(wǎng)接收各子系統(tǒng)產(chǎn)生的運行狀態(tài)信息、產(chǎn)生的重要事件,將實體圖標(biāo)、實體位置、歷史軌跡、武器打擊范圍、傳感器探測范圍、通信關(guān)系等顯示要素以不同顏色、圖標(biāo)、線型等方式在態(tài)勢圖上顯示。
4 仿真系統(tǒng)流程設(shè)計
4.1 仿真系統(tǒng)數(shù)據(jù)流向
設(shè)計仿真劇情時,系統(tǒng)能提供友好的人機界面對作戰(zhàn)任務(wù)、戰(zhàn)場環(huán)境、各類平臺性能參數(shù)、平臺上所搭載的傳感器和武器、傳感器和武器的性能參數(shù)進行配置。
系統(tǒng)為了便于用戶對算法的配置,在想定成員中應(yīng)該用樹形結(jié)構(gòu)列出仿真過程中所涉及的所有平臺和裝備,從而可以方便地完成各仿真子系統(tǒng)參數(shù)的設(shè)置、態(tài)勢評估、系統(tǒng)性能評估等算法的配置。仿真系統(tǒng)內(nèi)部各子系統(tǒng)和功能模塊的數(shù)據(jù)分發(fā)及交互關(guān)系如圖3 所示。
仿真開始后,各個聯(lián)邦成員能夠根據(jù)想定聯(lián)邦成員中對算法的配置自動從數(shù)據(jù)庫中調(diào)用對應(yīng)算法,并以各種方式展現(xiàn)不同算法的計算結(jié)果。二維戰(zhàn)場顯示圖能夠直觀反映當(dāng)前仿真時刻,戰(zhàn)區(qū)中各個仿真平臺的相關(guān)信息;評估與效能分析部分所提供的對各種算法評估分析的曲線圖則能夠直觀的反映算法性能的優(yōu)劣,便于用戶對算法的評價。
4.2 仿真系統(tǒng)信息流程
在該流程中,各仿真子系統(tǒng)在系統(tǒng)總控臺的管控下完成對目標(biāo)仿真子系統(tǒng)的實時打擊過程。其中無人機平臺仿真子系統(tǒng)及無人機雷達仿真子系統(tǒng)完成目標(biāo)探測,有人機平臺仿真子系統(tǒng)完成火控解算和打擊任務(wù);并通過二維態(tài)勢顯示仿真子系統(tǒng)實時顯示作戰(zhàn)流程,如圖4所示。
5 仿真模型校驗
5.1 校驗方法
無人機協(xié)同作戰(zhàn)仿真系統(tǒng)概念模型是對作戰(zhàn)環(huán)境、作戰(zhàn)實體及其交互關(guān)系、作戰(zhàn)指控、作戰(zhàn)行動、作戰(zhàn)結(jié)果等內(nèi)容的具體抽象和系統(tǒng)描述,應(yīng)根據(jù)武器裝備體系對抗所研究的內(nèi)容和范圍挑選相關(guān)領(lǐng)域的權(quán)威專家,依靠領(lǐng)域?qū)<业慕?jīng)驗性知識對其有效性進行評估。針對無人機協(xié)同作戰(zhàn)仿真系統(tǒng)這一具體應(yīng)用,概念模型校驗應(yīng)從如下幾方面入手:
(1)概念模型是否與仿真系統(tǒng)需求相符合,是否包括了所有需求;
(2)建模過程中的假設(shè)、算法以及約束條件是否正確,所用數(shù)據(jù)是否有效,模型結(jié)構(gòu)是否滿足仿真系統(tǒng)應(yīng)用目標(biāo)的需求;
(3)概念模型是否滿足仿真系統(tǒng)整體的性能指標(biāo)要求;
(4)概念模型是否滿足仿真系統(tǒng)的可信度要求,確定模型可接受的標(biāo)準(zhǔn);
(5)概念模型與需求之間的可追蹤性。
針對本仿真系統(tǒng)架構(gòu)可構(gòu)建3級仿真模型校驗評估指標(biāo)體系,從仿真需求、仿真架構(gòu)、仿真實體模型、仿真實體信息交互等方面,采用專家打分法對本仿真系統(tǒng)進行模型驗核。
5.2 評估指標(biāo)體系
根據(jù)無人機協(xié)同作戰(zhàn)仿真系統(tǒng)的結(jié)構(gòu)及功能模塊設(shè)計,針對本仿真系統(tǒng)得到如下仿真模型校驗評估指標(biāo)體系,如表1所示。
采用專家打分法,分別針對各級指標(biāo)的完備性、合理性、正確性進行打分,綜合各級指標(biāo)的總評分,獲得仿真系統(tǒng)指標(biāo)評分為模型校驗最終評分。其中,仿真系統(tǒng)校驗評估指標(biāo)體系主要對3級指標(biāo)的合理性、正確性進行考察評分,對1、2級指標(biāo)的完備性、合理性進行考察評分。
5.3 評估方法
5.3.1 各級指標(biāo)特性評估方法
評分標(biāo)準(zhǔn)為:好(100-85)、中(84-70)、一般(69-60)、差(59-0),評審專家分別針對各級指標(biāo)的完備性、合理性、正確性進行打分,各級指標(biāo)特性評估計算方法如下:
各級指標(biāo)綜合評分為:指標(biāo)評分 = 指標(biāo)合理性評分 * 指標(biāo)合理性權(quán)重 +指標(biāo)正確性評分 * 指標(biāo)正確性權(quán)重。
5.3.2 評分綜合方法
各級指標(biāo)總評分 = ∑(指標(biāo)評分 * 指標(biāo)權(quán)重);
系統(tǒng)模型校驗評分 = ∑各級指標(biāo)總評分;
5.3.3 綜合評價標(biāo)準(zhǔn)
模型校驗評分:合理可信(100-85)、比較合理可信(84-70)、基本合理可信(69-60)、不可信(59-0)。
5.4 校驗結(jié)果
收集評審專家意見后,經(jīng)過綜合計算后得到模型校驗評分為83.5分。根據(jù)綜合評價標(biāo)準(zhǔn),并在仿真開發(fā)策劃時針對專家意見進行相應(yīng)的落實和修改。主要的專家修改意見如下:
5.4.1 系統(tǒng)初始化模型
設(shè)計仿真劇情時,系統(tǒng)能提供友好的人機界面對作戰(zhàn)任務(wù)、戰(zhàn)場環(huán)境、各類平臺性能參數(shù)、平臺上所搭載的傳感器和武器、傳感器和武器的性能參數(shù)進行配置。
在系統(tǒng)初始化時進行,如果各仿真模型界面輸入的參數(shù)超出合理范圍,則系統(tǒng)給出提示框,要求用戶重新輸入。
5.4.2 網(wǎng)絡(luò)數(shù)據(jù)通信模型
可通過連續(xù)不間斷對固定長度數(shù)據(jù)的收發(fā),檢測數(shù)據(jù)傳輸有無丟包和出錯及統(tǒng)計丟包出錯率。當(dāng)丟包出錯率小于0.01%時,數(shù)據(jù)收發(fā)模塊測試合格;也可編制專門的測試程序用于測試網(wǎng)絡(luò)數(shù)據(jù)通信收發(fā)包的正確性,在程序中對收發(fā)包狀況進行監(jiān)控。若發(fā)送的數(shù)據(jù)包數(shù)和收到的數(shù)據(jù)包數(shù)一致,表明沒有發(fā)生丟包。
5.4.3 坐標(biāo)變換模型
可以通過檢驗在特殊位置的坐標(biāo)轉(zhuǎn)換是否正確;以及畫出坐標(biāo)轉(zhuǎn)換曲線圖,并分析其物理意義,來檢驗坐標(biāo)變換模塊的正確性。
5.4.4 運動模型
可通過二維或三維顯示的方法來檢驗仿真實體運動模型的正確性。用于考察仿真實體的運動行為是否與其性能參數(shù)或相關(guān)的軍事規(guī)則相符,相應(yīng)的算法或計算公式是否正確地反映了作戰(zhàn)實體的行為。
5.4.5 仿真結(jié)果保存路徑模型
在程序能夠穩(wěn)定運行的情況下,在各種典型戰(zhàn)情下進行仿真,檢驗仿真結(jié)果是否按照正確的格式生成相應(yīng)的數(shù)據(jù)存儲文件。如果正確,則認為該模塊有效,否則應(yīng)檢查錯誤出處,分析原因,進行修正。
5.5 仿真展示
根據(jù)仿真模型校驗結(jié)果完成對仿真系統(tǒng)的修改和完善,形成基于無人機火控級情報保障的無人機/有人機協(xié)同作戰(zhàn)系統(tǒng)流程仿真。系統(tǒng)仿真過程中的系統(tǒng)總控臺及二維態(tài)勢顯示如圖5、6所示。
6 結(jié)論
上述仿真過程演示中,包含了部分動態(tài)參數(shù)的調(diào)整。根據(jù)對協(xié)同作戰(zhàn)打擊效果的仿真結(jié)果統(tǒng)計,分析得出無人機情報信息進入火力單元的時效性將大大影響殺傷鏈閉環(huán)時間、作戰(zhàn)飛機生存能力(前出距離/留空時間)以及導(dǎo)彈武器命中概率等指標(biāo)。
在現(xiàn)代空戰(zhàn)中,為適應(yīng)快速作戰(zhàn)戰(zhàn)場環(huán)境、提高短時作戰(zhàn)效率,要求偵察型無人機提供給平臺或指揮機構(gòu)的情報數(shù)據(jù)具有火控質(zhì)量;為指揮人員節(jié)約決策、發(fā)布戰(zhàn)時指令的時間,必要時甚至能直接指導(dǎo)火控雷達完成“盲打”,充分發(fā)揮無人機在戰(zhàn)場上的應(yīng)用價值。因此使無人機具備實時高效的信息獲取與傳輸能力、開展機間數(shù)據(jù)鏈路設(shè)計和研制迫在眉睫。
參考文獻
[1]張軍良.基于HLA的分布式飛行指揮仿真系統(tǒng)設(shè)計[J].無線電工程,2014(04):10-13.
[2]劉傳波.協(xié)同作戰(zhàn)仿真系統(tǒng)的時間同步機制研究與分析[J].計算機工程與應(yīng)用,2010,46(23):223-226.
[3]任宏光,劉穎.無人機偵察打擊一體化武器系統(tǒng)發(fā)展[J].飛航導(dǎo)彈,2009(06):47-49.
[4]張崔霞,周新等.紅藍雙方攻防對抗仿真建模技術(shù)[J].指揮信息系統(tǒng)與技術(shù),2012,3(06):10-13.
[5]王芳,周桂鈞.大型察打一體無人機體系化運用研究[J].飛航導(dǎo)彈,2014(09):66-70.
[6]陳小陽,邢繼娟.武器裝備體系對抗仿真概念模型校驗研究[J].軍事運籌與系統(tǒng)工程,2013,27(03):70-75.
[7]張永亮,高志年.作戰(zhàn)仿真中一體化建模問題研究[J].軍事運籌與系統(tǒng)工程,2013,27(01):63-66.
