地下礦無人駕駛電機車運輸關鍵技術探究
2017-05-10 07:49:22隋淼
中國設備工程 2017年8期
關鍵詞:礦山
隋 淼
(長春黃金設計院,吉林 長春 130012)
地下礦無人駕駛電機車運輸關鍵技術探究
隋 淼
(長春黃金設計院,吉林 長春 130012)
本文在闡述地下礦無人駕駛電機車運輸的關鍵技術的基礎上,提出技術方案,即智能電機車技術、調度系統方案、通訊技術方案、裝載站控制技術。將無人駕駛運輸電機車投入到礦山中運行已獲成功,證實該方案可行性強,運行效果良好。
地下礦;無人駕駛電機車;地下運輸;技術方案
礦山地下運輸是保證地下采礦系統有序運轉的重要環節,現階段礦山常用的地下運輸方式包括三種,即皮帶運輸方式、無軌運輸方式以及有軌道運輸方式,以電機車提供地下運輸牽引力。但是,軌道運輸方面存在許多問題,例如無人運輸主要采用的信、集、閉調度系統僅能對電機車運行發揮指揮作用,無法起到控制效能。并且信、集、閉硬件無法精確獲取電機車位置,導致其調度效率較低。某些電機車仍然需要人工操作,致使礦石運輸過程仍然受制于人為因素,人員疲憊、操作失誤現象時有發生,嚴重者釀成安全事故。伴隨著礦產資源需求的不斷擴大,有些礦山處于超深度、高海拔區域,涌水量大,危險度高,這樣便對礦石運輸能力有著較高的要求。而無人駕駛電機車運輸技術的出現就為礦山開采提供了新的極具可行性與安全性的運輸方案,不僅可以滿足當前與日俱增的開采需求,同時節約人工成本,提高生產安全程度。這種技術主要適用于大型、特大型與特殊礦山。從其發展現狀與發展前景看,無人駕駛電機車技術已取得經濟效益、社會效益與環境效益的三重效益,將更為廣泛的運用到未來的礦山開采之中。
1 關鍵技術環節
1. 1 機車驅動技術方案
無人駕駛電機車無人員隨車操作,因此難以全面掌控電機車運行狀態,尤其是在電機車減速及停車時,電機車能否精準控制關乎采礦運輸系統能否安全順暢通行。對此,必須著力提升電機車精準度與可靠性。當前主要使用變頻器驅動電機車以滿足對電機車有效運行的要求,并且現今變頻器已趨于成熟安全,并廣泛應用于多種領域之中。因此,在機車驅動上可運用變頻器精準控制。
1. 2 機車控制技術方案
無人駕駛電機車要在地表控制室遠程遙控電機車完成地下運輸任務,確保在安全可靠基礎上減少人員勞動。但是若電機車運行全程依賴人工操縱,在大型礦山復雜巷道運輸上反而增大了人員勞動強度,降低運輸效率,同時運輸安全難以保證。所以,必須給電機車裝備智能控制系統,保證電機車自動運行,特殊環節由人員操控,從而減輕人員工作壓力,保證無人運輸電機車運行安全、順暢、高效。所以,應在電機車系統中配置智能功能。
現今無人駕駛電機車的智能化發展主要體現在以下幾方面:(1)根據指令自動行駛:無人駕駛電機車配設智能功能后,接到調度指令后,會依據預設程序行使,按照運行中的道路狀況自行調整運行速度與運行狀況,同時在電機車中升降、裝卸、鳴笛與停車等設置自動化程序。(2)自動保護功能:無人駕駛電機車在運駛中,可按照運輸線路道路狀況,自動調整運行速度,避免追尾等交通事故的發生;可按照線路狀況自行選擇終止運行,避免與其他機車摩擦碰撞。(3)控制方式:無人駕駛電機車的控制方式較多,主要包括檢修方式、自動方式、人工操作方式以及遙控方式等,需要根據無人電機車的實際生產需求,根據無人電機車生產需求選擇合適的控制方式,以此保證其能夠和電機車的危機處理、設備巡檢、人工操作、遠程控制以及實際需求相適應。(4)同步控制:電機車礦石運輸一般采用前后2臺電機車牽引進行運輸,因此2臺電機車必須保持同步操作功能。(5)事故處理:利用智能處理方式處理電機車電氣故障,設備控制室人員及時操縱設備推出運輸任務,避免因設備故障占用車道,確保運輸通暢。(6)控制功能:無人駕駛電機車可在運行過程中基于運行需要,使用加速、減速、停車、緊急制動、剎車、駐車控制等控制功能。(7)電壓適應范圍:在地下運輸線路中,有些線路較長,電壓波動較大,加之升降集電弓對電壓有特別要求,所以,變頻器應與直流電壓0~550V的直流電壓環境相適宜,通過二次開發變頻器,使變頻器適宜于作業環境。
1. 3 特殊傳感器方案
無人駕駛電機車運輸過程中,電機車運輸中的振動問題是急需解決的問題。對此,應首先分析電機車運輸環境。較之地上鐵路運輸,地下電機車運輸工作環境復雜,電機車精度低,減震性差,加之地下礦鐵軌鋪設不夠平整,運輸線路中多彎道、岔道,電機車通過卸載站時需要懸空,這些都會導致電機車在運行過程中振幅大,由此加大了檢測設備選擇難度。
過去在電機車改造上,主要采用傳統旋轉編碼器對電機車位移、速度進行檢測,然而使用發現,由于電機車自身有極強的震動性,旋轉編碼器在震動影響下,壽命較短,難以滿足電機車運行要求。電機車生產廠商需與傳感器廠家緊密合作,突破傳統檢測設備結構,解決電機車使用過程中的振動問題,制作出可對電機車位移、速度進行準確檢測的傳感器。
2 通訊技術方案的確定
2. 1 地下無人駕駛電機車無線通訊環境分析
地下電機車運行于巷道,為檢測無人駕駛電機車無線通訊環境,其試驗現場通訊巷道截面為高、寬分別為3.2 m 和3 m,半徑為60m,列編組頭尾不相見。該巷道路面不平。電機車高、寬分別為2m、1.8m。其中1列運礦編組約為70m,其中電機車和巷道的間隙為0. 6m。
對1列運礦編組進行無線通訊試驗,試驗結果表明主要作用于無線通訊,存在明顯的活塞效應,空巷道截面為運礦編組巷道通訊截面的30倍,而通訊距離介于空巷道距離的1/3~1/2之間。
狹長巷道會對通訊距離產生直接的影響,地表空曠地帶通訊距離為2km以內的通訊設備,能夠直接進行地下無人駕駛電機車的通訊,如果巷道彎曲,將會影響通訊效果和通訊距離。狹長巷道中采取無線通訊方式,即波及通訊距離同時會對無線電發射造成影響,影響通訊狀況。地表無線電波狀況受傳播距離的影響較大,傳播距離越大,地表無線電波降低越大。地下巷道內,無線電波為完全減退時,會規律性的被反射,繼而影響無線通訊情況。
2. 2 無人駕駛電機車運輸對無線通訊的需求
無人駕駛電機車要想實現順暢運輸,應有兩條無線通訊鏈路,其一,編組車頭與車尾間的,使頭車、尾車實現同步控制;其二,電機車與控制室間的通訊鏈路,使電機車運行數據送至控制室,同時將其中的指令傳輸至電機車。
(1)無線通訊對象數目。通常狀況下,電機車運輸無線通訊對象的數量是固定不變的,對于特大型礦山至少需要8列編組,對于大型礦山需要設置4列編組,在實際設定過程中需要根據運輸的實際需求確定。綜合而言,無人電機車運行中通訊對象具有數量少、對量固定的特點。(2)無線通訊的數據容量。一般狀況下,電機車對運輸通訊對象數據容量的要求非常苛刻,嚴格明確無線通訊對象的工作任務,并按照控制的實際要求將總通訊數據容量降低至最小字節。(3)無線通訊覆蓋范圍要求。為充分實現無人電機車運行的可靠性與安全性,在電機車運輸中需要根據需求覆蓋無線通訊,防止通訊死角的出現。(4)無線通訊速率及中斷。為充分實現無人電機車運行的可靠性與可控制性,其通訊速率應保證符合遙控電機車運行要求。無線通訊覆蓋范圍的通訊中斷,應施以智能措施補救,確保及時下達控制指令,滿足生產安全。
2. 3 通訊方案確定
在科學技術飛速發展背景下,無線通訊技術隨之快速發展,各種類型與用途的無線通訊技術將走入實際應用之中。普遍應用于礦山運輸地下巷道的無線通訊之中,主要為WIFI, ZigBee, PLC無線通訊以及有串口無線通訊等。在充分掌握無人駕駛電機車運輸對于無線通訊的要求,我們可在探析通訊技術特點的基礎上,可指定如下無線通訊方案:將無線通訊主站設置于集中控制室中,并在巷道內部鋪設RS485電纜,在RS485電纜上連接通訊中斷器。使其與電機車收發一體機構成通訊系統,進而形成完善的通訊網絡。如圖1所示。
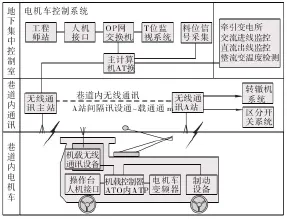
圖1 無線通訊方案
3 結語
無人駕駛電動車順應當前不斷擴大的礦山規模,是地下礦電機車運輸的今后發展的必然趨勢。本研究通過分析無人駕駛電機車關鍵技術,提出無線通訊方案,探究地下礦無人駕駛電機車在地下礦運輸中的具體應用狀況,為其他礦采用無人駕駛電機車運輸提供參考。
[1]地下礦無人駕駛電機車運輸技術[J]. 現代職業安全,2013,04:108.
[2]張毅力,汪令輝,黃壽元. 地下礦無人駕駛電機車運輸關鍵技術方案研究[J]. 金屬礦山,2013,05:117-120.
[3]盧央澤. 大規模地下礦有軌運輸系統網絡結構優化[J]. 礦業工程研究,2014,04:72-74.
TD52
A
1671-0711(2017)04(下)-0104-02
猜你喜歡
資源節約與環保(2022年8期)2022-09-20 02:24:38
現代礦業(2021年12期)2022-01-17 07:30:32
河北地質(2021年2期)2021-08-21 02:43:50
神劍(2021年3期)2021-08-14 02:30:08
昆鋼科技(2021年2期)2021-07-22 07:47:06
石材(2020年11期)2021-01-08 09:21:48
礦產勘查(2020年7期)2020-12-25 02:43:42
陽光(2020年6期)2020-06-01 07:48:36
當代工人·精品C(2020年1期)2020-05-20 07:54:37
建材發展導向(2019年11期)2019-08-24 06:35:46