無人機地面運動控制與仿真
2017-05-10 07:02:24王茜,孫科
計算機測量與控制 2017年4期
關鍵詞:模型
王 茜,孫 科
(中國飛行試驗研究院,西安 710089)
無人機地面運動控制與仿真
王 茜,孫 科
(中國飛行試驗研究院,西安 710089)
為了解決無人機糾偏剎車系統中實際存在的問題,對無人機地面運動進行了研究,采用前輪轉彎、方向舵、差動剎車聯合使用模式,以無人機的側偏角、側偏距為反饋信號,設計了無人機地面運動糾偏控制律,通過遺傳算法的全局優化過程實現其糾偏參數尋優,在Simulink平臺建立了無人機糾偏數學模型;試驗結果表明,建立的無人機地面運動糾偏數學模型正確有效,能夠模擬出無人機地面運動的真實情況;基于遺傳算法的控制策略能夠實現一定范圍內的無人機地面運動糾偏,提高跑道的利用率。
無人機;仿真;糾偏控制;遺傳算法
0 引言
無人機地面運動是無人機安全起降過程的一個重要階段,通過對無人機地面運動的研究,對實現起降過程的自動控制有著重大的意義。目前國內對于無人機的地面運動研究相對較少,只有少部分無人機能夠實現全自主起飛著陸。對無人機六自由度地面運動,特別是偏航和側向運動的研究不足,還有很多工作需要去做。文獻[1]分別使用了前輪轉向與主輪差動兩種方式進行糾偏,對比了兩種糾偏方式的糾偏效果;文獻[2]使用了主輪剎車與方向舵聯合仿真糾偏;文獻[3]使用了主輪剎車、前輪轉彎以及方向舵聯合仿真,但在這些文獻中,在給出糾偏控制參數時,都是直接給出固定參數值,沒有統一給出糾偏參數尋優的方法。
本文針對以上問題,在MATLAB中的Simulink平臺中建立了無人機機體模型、機輪模型、起落架模型、跑道/機輪摩擦系數模型、剎車系統作動裝置模型以及剎車裝置模型;在此基礎上,使用了主輪剎車、前輪轉彎以及方向舵聯合糾偏控制律,并且采用了遺傳算法設計其控制參數,對無人機的地面運動進行仿真分析。對改進、設計新型高性能控制律,提高無人機著陸階段的安全性能具有很大的借鑒意義。
1 無人機地面運動模型建立
1.1 質心運動學方程
在慣性地面坐標系下,應用牛頓第二定律建立無人機在合外力F作用下的線運動,得到質心運動方程組如下所示:
(1)
式中,∑Fx、∑Fy、∑Fz分別是機體坐標下的3個軸的合力;m為無人機的質量;u、v、ω為無人機沿機體軸的3個線速度;p、q、r為無人機沿機體軸的3個角速度。
1.2 質心轉動動力學方程
根據牛頓第二定律建立無人機在外和力矩∑M作用,得到角運動方程組如下所示:
(2)
式中,∑Mx、∑My、∑Mz分別是機體坐標系下3個軸的合力距;Ix、Iy、Iz、Ixz分別為航向方向轉動慣量、翼展方向轉動慣量、垂直方向轉動慣量、航向與垂直方向轉動慣量。
1.3 無人機地面運動受力分析
在考慮無人機的受力時,必須考慮起落架與地面的相互作用,無人機的受力分析圖如圖1所示,G為重力;T為發動機慢車推力;Fs為傘阻力;Y為空氣升力;X為空氣阻力;Z為空氣側力;Fxi,Fyi,Fzi分別為縱向摩擦力,側向摩擦力以及支持力,i=1,2,3分別為前輪,左主輪,右主輪。

圖1 無人機地面運動受力分析
1.3.1 重力
無人機重力G的分量為[00mg]T。
1.3.2 氣動力
阻力:
X=0.5CxρsV2
(3)
側力:
Y=0.5CyρsV2
(4)
升力:
Z=0.5CzρsV2
(5)
式中,Cx、Cy、Cz為氣動系數,在機體坐標系下的值;Cl、Cm、Cn為力矩系數,在機體坐標系下的值;ρ為空氣密度;s為機翼面積。
1.3.3 發動機推力
在機體坐標系中,發動機推力矢量表示為:
T=[Tcosφp-Tsinφp]T
(6)
1.3.4 地面對無人機的作用力
地面對無人機的作用力主要是由地面對輪胎產生的縱向摩擦力,側向摩擦力,以及起落架對無人機的垂直方向的支撐力。
1.3.4.1 起落架支反力
起落架的壓縮力為:
(7)
式中,K1為彈簧系數;K2為阻尼系數;ΔZ為起落架位移變化量。
1.3.4.2 輪胎/跑道摩擦力
剎車制動時主要依靠輪胎與地面產生摩擦力來剎停,跑道與輪胎的摩擦系數不是一個常量,它受很多因素的影響,例如無人機速度、滑移率、無人機載荷、輪胎側傾角、跑道狀況等等復雜因素。
跑道對輪胎的摩擦力可以分為縱向及側向兩個方向來考慮。
FX=FZ*μX
FY=FZ*μY
(8)
2 無人機與地面摩擦系數的求取
2.1 總摩擦系數
根據相關資料可以知道,跑道給機輪提供的摩擦系數存在一個最大值,這個最大值與跑道的狀況,無人機速度以及輪胎的充氣壓力有關,如下表示:
干燥路面:
μmax=0.912(1-0.0011p)-0.00079V
(9)
潮濕路面:
(10)
結冰路面:
(11)
式中,p為輪胎充氣壓力;V為無人機速度。
在這里,我們定義輪胎的滑移率為:
(12)
式中,Δx=Vtcosβ-x,Δy=Vtsinβ;δx,δy分別為輪胎的縱向及側向滑移率;x,y分別為輪胎的縱向及側向位移;β為輪胎的側滑角。
為了更好的表示與理解,定義輪胎的廣義滑移率為:
(13)
式中,Φ,Φx,Φy為輪胎總體側向及縱向的廣義滑移率;Nx,Ny為輪胎的剛度系數;μx,μy為輪胎的縱向及側向摩擦系數;Fz為輪胎的垂直載荷。
如圖2所示,根據摩擦橢圓假設[5],我們可以得到,無人機的縱向摩擦系數最大值及側向摩擦系數最大值滿足:
(14)
再根據受力分析,通過合理的簡化可以近似得到,無人機的縱向摩擦系數最大值及側向摩擦系數最大值滿足:
(15)
并且:
(16)
式中,μxmax,μymax分別為輪胎縱向與側向的摩擦系數的最大值。
2.2 縱向摩擦系數
準穩態模型中,最著名同時也是最典型的模型就是Pacejka模型,也叫“魔術公式”[6],由于該模型能夠狠好的匹配實驗數據,因此本文使用該模型模擬計算輪胎與跑道間的縱向摩擦系數,具體表達式如下:
μx=B1sin(B2arctan(B3σ))
(17)
式中,B1為峰值因子,B1=μxmax;B2為剛度因子;B3為曲線因子。
在不同跑道狀態下,實驗測得的B2,B3的取值分別為:

表1 不同跑道狀態B2,B3的取值
2.3 側向摩擦系數
側向摩擦系數與輪胎的側向剛度、垂直載荷,輪胎側偏角的因素[36]有關, 左主輪的側偏角為:
(18)
右主輪的側偏角為:
(19)
前輪可以相對機體偏轉,前輪的側偏角為:
(20)
式中,am,an,bw為左右主輪及前輪到重心的水平距離及縱向距離;r為無人機的偏航角速度;θL為給定控制是無人機速度在機體坐標系的分量;[ugvgwg]為無人機速度在穩定坐標系中的分量。
根據上面求得的側偏角和廣義滑移率,輪胎/跑道的摩擦系數為:
(21)
(22)
(23)
式中,p為輪胎充氣壓力;Pr為輪胎額定充氣壓力;w為輪胎寬度;d為輪胎直徑;δ為輪胎壓縮量;Cc為轉彎剛度系數。
Cc的取值如表2所示。
3 糾偏控制律設計
無人機實時輸出橫側向的運動信息,輸入傳動剎車控制律通道中,經過一定的運算分析,產生差動剎車指令,傳給相應的剎車機構,剎車機構產生剎車量,控制無人機的側偏距和側偏角保持在一定的范圍內。
側偏距為主反饋信號,同時引入側偏速度、偏航角、偏航角速度信號以改變糾偏控制性能。這些信號被送入剎車糾偏控制律模塊,剎車糾偏模塊產生剎車指令,剎車控制器根據剎車指令給出左右剎車機構不同的糾偏剎車量,剎車機構疊加糾偏剎車量和剎車量,將疊加后的剎車信號送給電控剎車閥,對無人機產生左偏或右偏控制作用。
δb=ky(y-y0)+kvyvy+kψ(ψ-ψ0)+krr
(24)
若δb≥0,δbr=δbt,δbl=δbc+δbt;
若δb≤0,δbl=δbt,δbr=δbt-δbc。
當無人機速度達到某一值后且偏離跑道中心線,此時糾偏和剎車兩種狀同時存在,首先飛控會根據速度的不同給出不同的剎車量,若果此時機輪偏離跑道中心線,剎車控制器也會給出相應的糾偏剎車量,最后將剎車量和糾偏剎車量疊加,送給剎車機構,實現剎車、糾偏、再剎車的循環狀態。
在無人機地面運動時,當已經產生了一定的側偏距,對其進行糾正時,要求系統的響應滿足以下條件:
1)系統能平穩快速的回到跑道中心線;
2)在糾偏過程中,最大的側偏距不能超過給定的范圍。
按照這個要求,規定該系統的響應時間不超過10s,最大的側偏距不超過10m。

(25)
式中,Dzm為糾偏參考模型輸出;Dzc為側偏指令;ωn為二階環節自然頻率;ξ為相對阻尼比。
適應值函數為:
(26)
式中,Dzm(i)為iT時刻參考模型的側偏距輸出值;Dz(i)為iT時刻無人機的側偏距;T為數據值解算的步長;N為總解算時間對應的解算總步數。
4 仿真結果分析
無人機在干跑道著陸時就存在10m的初始側偏距進行糾偏剎車的仿真曲線如圖2~9所示。由仿真圖可以觀察到,無人機在干跑道10m糾偏時的剎車距離為390m,剎車時間為19s。與無初始側偏距的情況進行剎車的情況相對比,剎車距離增加,剎車時間變長。產生這種情況的原因主要有兩點:第一點是側偏距的存在,使得無人機滑跑的軌跡由直線變為曲線;第二點是由糾偏策略決定的,無人機在著陸滑跑時,在制動的同時還需要糾偏。在制動時,需要設定一個剎車量的標準值,左主輪與右主輪都按照這個剎車百分比的剎車壓力來剎車,在糾偏時,需要降低某個主輪的壓力達到糾偏的目的。比如無人機在跑道中心線的右側,欲使無人機回到跑道中心線需要其機頭向左偏轉,在這個過程中,左輪的剎車壓力不變,右輪的剎車壓力降低,右機輪速度變快,它與地面的結合力降低,左右輪與地面結合力的差距產生了向左的偏航力矩,最終實現糾偏的目的。整個糾偏過程中中,由于剎車壓力是在預置壓力的基礎上減少,故從總體上來看剎車壓力減小,剎車距離變長,剎停時間也變長。

圖2 側向位移變化

圖3 剎車距離變化
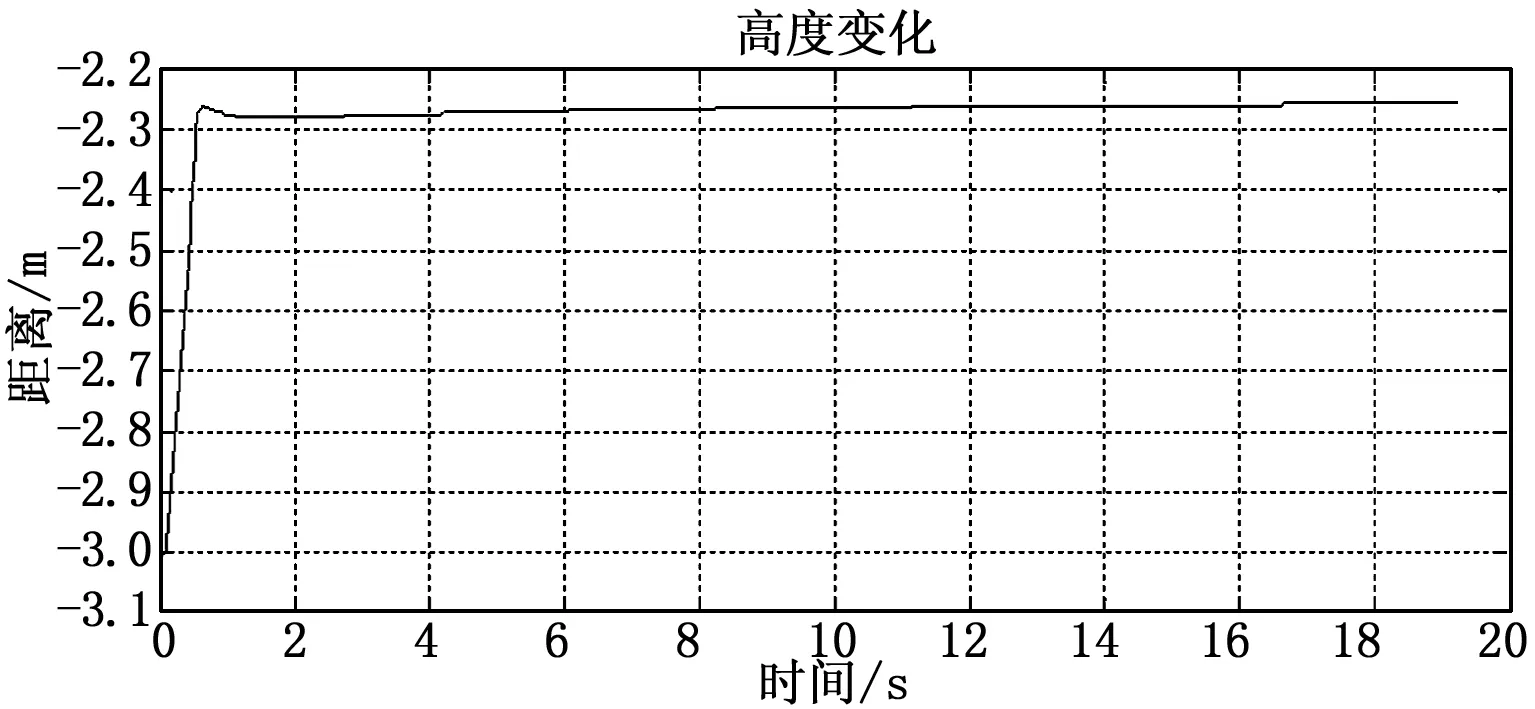
圖4 無人機高度變化

圖5 無人機滾轉角變化

圖6 無人機俯仰角變化
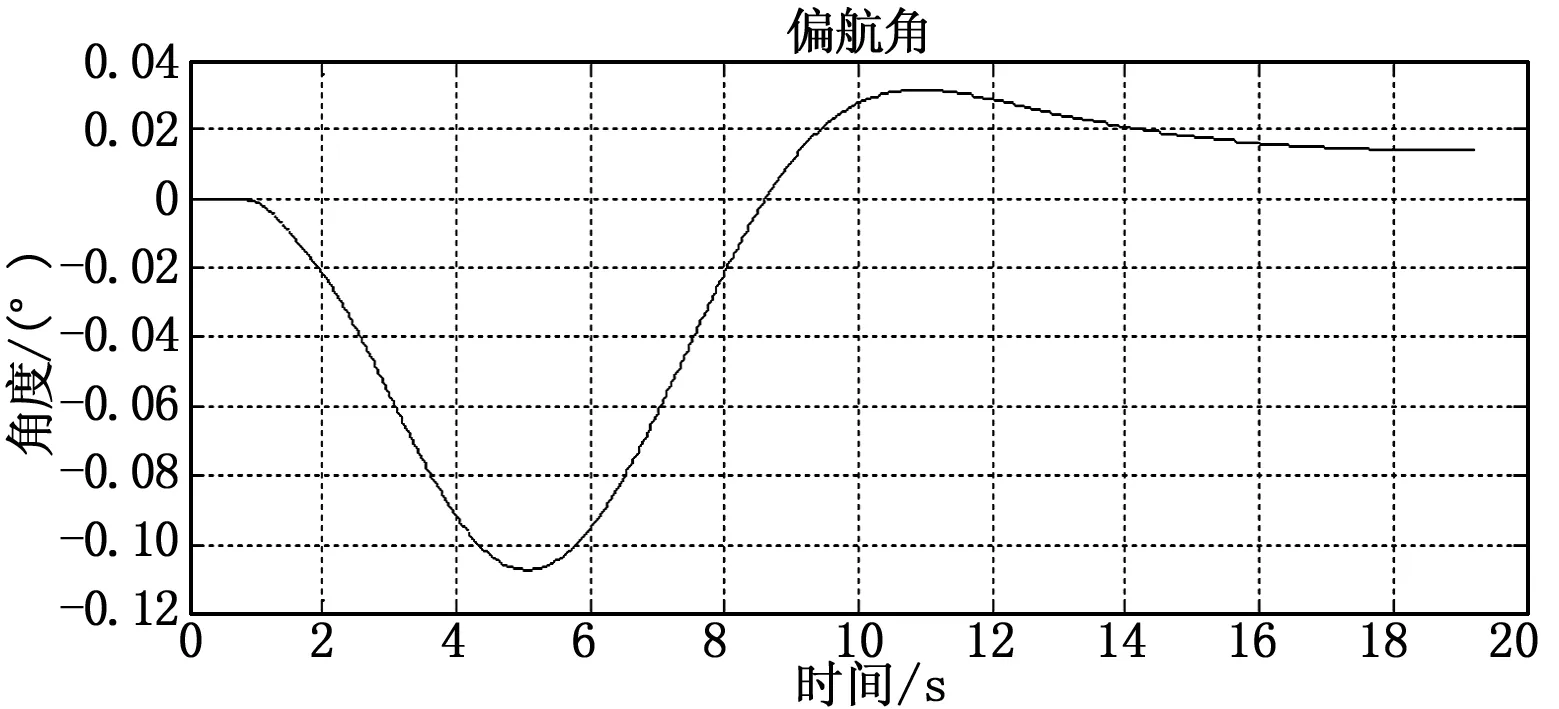
圖7 無人機偏航角變化

圖8 無人機速度及機輪速度

圖9 剎車壓力變化
從仿真結果還可以看到,側偏距由初始的10m平穩的減小,經過一個較小的震蕩后,保持在0附近。滾轉角在一個極小的領域內震蕩并趨于穩定,基本保持在0°,故機身不會發生很大的滾轉運動,造成無人機的事故。偏航角初始時由于無人機機頭向左偏轉,故有一個很小的負角度,后來逐漸調整,最終也恢復到0°附近。這說明了在干跑道滑跑時,對于10m的初始側偏距,具有非常良好的糾偏效果。
5 結束語
考慮無人機在地面運動時左右輪受力不一致的情況,在Matlab/simulink仿真平臺下,建立了六自由度模型模型。并通過為設計剎車控制律,解決了主輪載荷不同時可能會出現的側滑等安全問題,提高了飛機地面運動的穩定性和安全性。仿真結果證明模型有效,控制算法可行。
[1] 陳 磊. 飛翼飛行平臺地面滑跑建模與航跡糾偏控制研究[D]. 南京:南京航空航天大學, 2009.
[2] 張華亮, 周 洲. 飛翼無人機地面滑跑建模與航向控制[J]. 系統仿真學報, 2009, 20(24): 6759-6762.
[3] 周乃恩. 無人機起降糾偏控制技術研究[D]. 哈爾濱:哈爾濱工程大學, 2011.
[4]BaarspulM.AReviewofFlightSimulationTechniques[J].ProgressintheAerospaceSciences(S0376-0421), 1990, 27(1): 1-120.
[5]GuoKH.Aunifiedtiremodelforbrakingdrivingandsteeringsimulation[R].SAETechnicalPaper, 1989.
[6]CabreraJA,OrtizA,CarabiasE,etal.Analternativemethodtodeterminethemagictiremodelparametersusinggeneticalgorithms[J].VehicleSystemDynamics, 2004, 41(2): 109-127.
[7]SmileyRF,HorneWB.Mechanicalpropertiesofpneumatictireswithspecialreferencetomodernaircrafttires[J].Tires,1958.
Simulate and Control of Unmanned Aerial Vehicle’s Ground Moving
Wang Qian,Sun Ke
( Flight test establishment of China, Xi’an 710089,China)
In order to solve the actual problems arose with the lateral deviation braking system, a mathematical model of lateral deviation control of Unmanned Aerial Vehicle was built on Simulink, the correction algorithm of Unmanned Aerial Vehicle moving on the ground was designed and its correction parameter was programmed to the best by the front wheel steering, the nose wheel string, the difference in combined brake model and the rudder to control the lateral deviation correction, and also by the application of the full optimization process of genetic algorithms. By applying the control method of genetic algorithms, it is possible to achieve certain level of deviation correction in the Unmanned Aerial Vehicle’s moving on the ground and can thus improve the utilization of runways.
unmanned aerial vehicle;simulation; lateral deviation control; genetic algorithms
2017-01-05;
2017-01-20。
王 茜(1990-),女,陜西延安人,碩士研究生,助理工程師,主要從事機載測試方向的研究。
1671-4598(2017)04-0087-04
10.16526/j.cnki.11-4762/tp.2017.04.025
TP27
A
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19