基于單片機(jī)的智能循跡小車設(shè)計(jì)
2017-05-08 03:16:13張猛丁愛國(guó)陳欣歡
山東工業(yè)技術(shù) 2017年8期
張猛+丁愛國(guó)+陳欣歡
摘 要:本次設(shè)計(jì)的單片機(jī)控制的智能循跡車以89C52芯片為小車的控制核心,運(yùn)用L298N驅(qū)動(dòng)芯片實(shí)現(xiàn)小車的運(yùn)動(dòng)。通過(guò)兩節(jié)18650電池供電,使用紅外傳感器實(shí)現(xiàn)小車自動(dòng)尋跡、測(cè)速。利用PWM來(lái)實(shí)現(xiàn)對(duì)小車車速的調(diào)節(jié)。
關(guān)鍵詞:stc89C52;紅外傳感器;智能循跡小車
DOI:10.16640/j.cnki.37-1222/t.2017.08.245
1 引言
智能循跡汽車是汽車電子、人工智能、機(jī)械制造多個(gè)學(xué)科領(lǐng)域的結(jié)合體,具有重要的應(yīng)用價(jià)值。智能尋跡車是運(yùn)用單片機(jī)為基礎(chǔ)設(shè)計(jì)的,智能循跡小車?yán)脗鞲衅鱽?lái)識(shí)別賽道信息,利用傳感器檢測(cè)智能車的加速度和速度,從而實(shí)現(xiàn)快速穩(wěn)定的尋跡行駛。本設(shè)計(jì)簡(jiǎn)單易懂,但是應(yīng)用價(jià)值很高。在科技越來(lái)越發(fā)達(dá)的現(xiàn)代社會(huì),汽車的普及率已經(jīng)非常之高。許多汽車制造廠商提出無(wú)人駕駛的概念,例如特斯拉。因此次設(shè)計(jì)具有很高的科研價(jià)值。
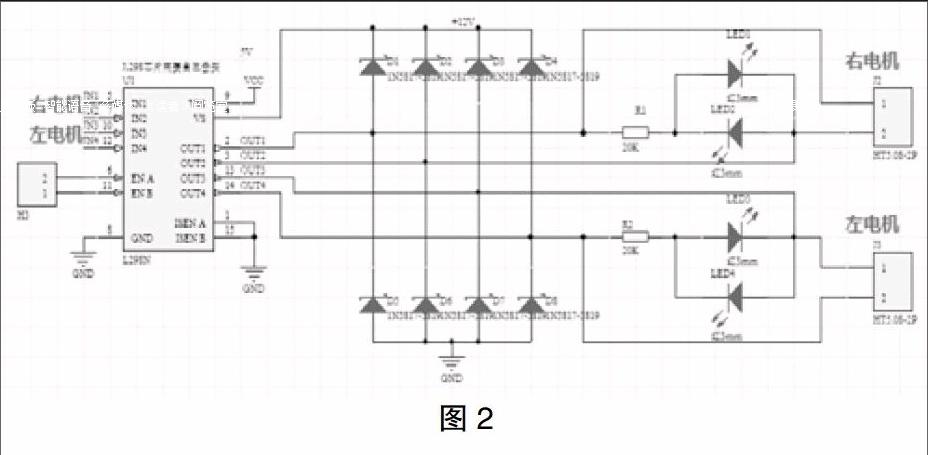
2 基于單片機(jī)設(shè)計(jì)的智能小車的總設(shè)計(jì)方案
該設(shè)計(jì)是以89C52單片機(jī)為主控制芯片,通過(guò)7.5V電池直接給電機(jī)供電。經(jīng)過(guò)穩(wěn)壓電路給單片機(jī)以及傳感器供電。系統(tǒng)采用L298N驅(qū)動(dòng)芯片來(lái)實(shí)現(xiàn)小車的運(yùn)動(dòng)和轉(zhuǎn)向。采用四路紅外傳感器來(lái)實(shí)現(xiàn)小車的循跡。采用紅外傳感器實(shí)現(xiàn)小車的測(cè)速。使用PWM對(duì)小車進(jìn)行調(diào)速,使用加度傳感器來(lái)防止小車發(fā)生側(cè)翻。
3 硬件電路設(shè)計(jì)
硬件電路的設(shè)計(jì)單片機(jī)最小系統(tǒng)模塊為控制中心、電源模塊功能,電機(jī)驅(qū)動(dòng)模塊實(shí)現(xiàn)小車的轉(zhuǎn)向及運(yùn)動(dòng),紅外循跡傳感器模塊測(cè)速模塊實(shí)現(xiàn)賽道信息檢測(cè)。下面介紹一下驅(qū)動(dòng)傳感器模塊、電機(jī)驅(qū)動(dòng)模塊、測(cè)速模塊。
3.1 電源模塊電路
系統(tǒng)是利用兩節(jié)3.5V鎳鉻電池供電。通過(guò)5V文雅電路轉(zhuǎn)換稱觀點(diǎn)偏激所需的電壓。7電壓直接供給電機(jī)驅(qū)動(dòng)芯片。以下是設(shè)計(jì)的硬件圖。
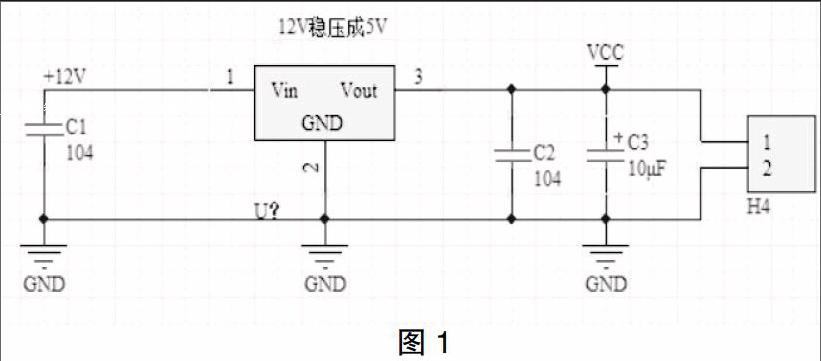
3.2 電機(jī)驅(qū)動(dòng)模塊電路
電機(jī)驅(qū)動(dòng)模塊主要控制小車的方向,因此對(duì)電機(jī)驅(qū)動(dòng)具有反應(yīng)快、可靠性高等特點(diǎn)。因此采用L298N芯片,通過(guò)操作單片機(jī)的I/O口電平信號(hào),即可對(duì)電機(jī)進(jìn)行正反轉(zhuǎn)、停止操作的控制。
3.3 測(cè)速模塊
系統(tǒng)使用紅外傳感器檢測(cè)直流電機(jī)的轉(zhuǎn)速。只需要在碼盤智商粘貼一個(gè)接受廣電信號(hào)的接收裝置,然后對(duì)采集的信息進(jìn)行處理即可得出小車的速度。
3.4 循跡模塊
采用TCRT5000制作的四路循跡模塊具有價(jià)格低廉,穩(wěn)定性高的特點(diǎn)。TCRT5000光電傳感器模塊是一款紅外反射式光電開關(guān)。TCRT5000具有可靠性高,價(jià)格便宜,制作簡(jiǎn)單的特點(diǎn)。
3.5 加速度傳感器模塊
ADXL345芯片非常適合進(jìn)行加速度的測(cè)量,測(cè)量范圍大,數(shù)字輸出數(shù)據(jù)訪問(wèn)簡(jiǎn)單方便。而且該芯片穩(wěn)定性以及可靠性非常高。采集的信息通過(guò)加法處理即可得到小車的加速度。
4 軟件代碼調(diào)試
系統(tǒng)開始工作,首先初始化IIC、PWM、外部中斷。初始化結(jié)束后開始循環(huán),單片機(jī)各個(gè)模塊開始工作,然后講采集的數(shù)據(jù)發(fā)送給單片機(jī)。單片分析數(shù)據(jù)對(duì)小車的前進(jìn)路線進(jìn)行調(diào)整,并將信息通過(guò)1602顯示出來(lái)。
5 結(jié)語(yǔ)
以stc89c52作為主控芯片,設(shè)計(jì)的智能尋跡小車,經(jīng)過(guò)多次實(shí)驗(yàn)其尋跡效果良好,速度和轉(zhuǎn)向控制響應(yīng)快,系統(tǒng)的定性和抗干擾能力強(qiáng),而且能夠適應(yīng)不同程度的光照條件下。同時(shí)針對(duì)最近大熱的無(wú)人駕駛汽車而言,此設(shè)計(jì)能更好的幫助人們理解無(wú)人駕駛的概念。關(guān)于智能循跡小車此設(shè)計(jì)只是簡(jiǎn)單的進(jìn)行研究,系統(tǒng)還需要進(jìn)一步的完善。后期將加入自動(dòng)導(dǎo)航功能。
參考文獻(xiàn):
[1]郭天祥.51單片機(jī)C語(yǔ)言教程[M].北京:電子工業(yè)出版社,2009.
[2]黃智偉.全國(guó)大學(xué)生電子設(shè)計(jì)競(jìng)賽系統(tǒng)設(shè)計(jì)[M].北京航空航天大學(xué)出版社,2011.
[3]譚浩強(qiáng).C語(yǔ)言程序設(shè)計(jì)[M].北京:清華大學(xué)出版社,1991.
[4]高月華.基于紅外光電傳感器的智能車自動(dòng)尋跡系統(tǒng)設(shè)計(jì)[J].半導(dǎo)體光電,2009(01).