輕小型機載LiDAR的航線設計
2017-04-28 03:23:11李佳俊鐘若飛
自然資源遙感 2017年2期
關鍵詞:測量
李佳俊, 鐘若飛
(1.首都師范大學資源環境與旅游學院,北京 100048; 2.首都師范大學三維信息獲取與應用教育部重點實驗室,北京 100048)
輕小型機載LiDAR的航線設計
李佳俊1,2, 鐘若飛1,2
(1.首都師范大學資源環境與旅游學院,北京 100048; 2.首都師范大學三維信息獲取與應用教育部重點實驗室,北京 100048)
為研究輕小型機載LiDAR的航線設計,以VUX-1型激光掃描儀為例,計算多周期回波(multi time around,MTA)對飛機作業高度的限制; 根據要求的點云密度、掃描頻率、掃描線速度等指標,依照航空攝影測量原理以及機載LiDAR數據獲取規范,從中區別機載LiDAR與傳統攝影測量學的不同,并借鑒機載LiDAR的數據采集方式與傳統掛載專業相機的攝影測量的相似之處,判定在不同情形下激光的測距變化(例如測區內不同類型的目標反射率不同或大氣能見度不同導致的最遠測距能力的變化等); 在考慮以上問題基礎上,對機載LiDAR系統進行航線設計; 最后分別對比旁向點間距和航向點間距的誤差,分析其原因并判定該航線設計方案的可行性。
機載LiDAR; 點云; 重疊率; 多周期回波(MTA); 航線設計; 測距范圍
0 引言
帶有同步影像數據采集的機載激光雷達(airborne LiDAR)系統能夠有效地獲取地表的色彩、紋理以及三維信息。合理的飛行計劃能夠確保數據質量達到預期的效果。然而,預期的數據質量會因飛行參數(飛行高度、飛行速度、飛行方向等)和掃描儀參數[1](掃描角度、掃描頻率等)的變化而改變。隨著我國《機載激光雷達數據獲取規范》的頒布以及國內外激光掃描儀生產工藝水平的不斷提高,如何設計好飛行方案以獲取符合要求的數據,已經成為亟待解決的問題。
目前,國內外地面站(ground control station)的控制軟件有很多,例如我國的成都縱橫自動化技術有限公司JAC AP-100無人機飛控與導航系統是一款超小型、低功耗、高度集成、全功能的無人機飛行控制與導航系統。該軟件提供了豐富的菜單用于數據顯示、系統設置、操作控制和地圖操作等。類似的還有桂林飛宇電子科技有限公司的地面站軟件FYGCS3.0。最近興起的大疆公司與零度公司也推出了自己的地面控制站系統,大疆公司的PC Ground Station的界面設計更加人性化,而且具備谷歌3D地圖視角等; 零度公司也推出了自己的地面控制站YS-GCS,與大疆公司一樣也將谷歌地圖融入進來,并且還有基于安卓系統和蘋果系統的手機控制端。美國UAV Flight System公司的產品AP40和AP50自動駕駛儀地面控制站軟件Ground Pilot是基于Windows開發的、適用于AP40和AP50自動駕駛儀的一款軟件產品,該軟件能將無人機圖形化顯示,在地圖區域能集成顯示無人機位置與飛行航線。開源項目Open Pilot則提供了社會成本低、但功能強大的穩定和自動駕駛儀平臺,它是一個開放的試驗平臺,支持直升機和固定翼飛機。另外,國外的軟件還有ASCOT,CCNS4等。天寶和Rigel等公司也推出了諸如Trimble Tablet Rugged PC類型的地面站軟件。
但上述地面站軟件中大多只具備常規的航線設計功能,少部分只支持傳統的相機航線設計,幾乎沒有針對激光掃描儀這一新型傳感器的航線設計。此外,國內外的大多數學者主要就LiDAR整體掃描帶寬等進行了有關重疊度的分析,很少對激光掃描儀的每一個采集的激光腳點進行詳細分析。本文主要針對具有多周期回波(multi time around, MTA)技術的激光掃描儀,結合機載平臺(例如飛機的側滾角以及連續脈沖之間的角度增量對激光測距的影響)進行詳細分析,最終通過計算不同參數間的關系制定合理的航線設計方案。
1 MTA處理技術
1.1 MTA測距原理
MTA測距是通過測量激光往返多個周期累計時間求平均的一種方法。即發射系統發射光脈沖時, 從發射時刻開始計數,接收系統接收到回波光信號后不關閉計數器, 而是經過固定延時后再去觸發發射光脈沖; 這樣,發射→接收→延時→再次發射就形成了周期振蕩信號。經過多個周期后, 關閉計數器; 把多個周期的計數值減去多個周期的延時后取平均, 即得到光脈沖往返一次所需時間[2]。將所得的時間代入式(1),得到目標的距離,即
d=ct/2,
(1)
式中:t為往返時間差; c為光速;d為距離。
1.2 MTA的分區原則
MTA處理技術能夠定位處于本次測距周期之后幾個周期內的目標回波信號。根據掃描儀掃描頻率的不同,每個測量周期的測距范圍也會發生相應的變化。一般情況如圖1所示。
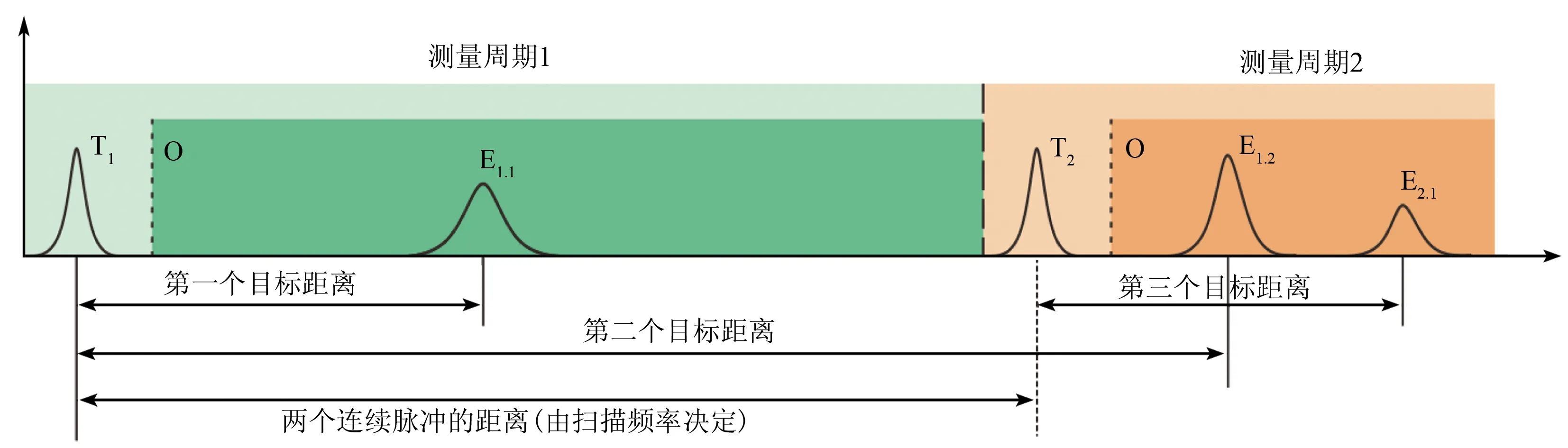
(T為發射器發射的脈沖信號; O為測量起始點(相當于距離是0); E為目標物反射的回波信號。)
從圖1可以看出,激光發射器連續發出的2個脈沖T1與T2分別對應接收器所接收到的目標回波E1.1和E2.1,脈沖和目標回波都處于同一個測量周期內。在這種情況下,無需MTA技術的處理就能夠判別目標和掃描儀發射器之間的距離。但有時目標距離激光發射器太遠,以至于目標回波不能在本測量周期之內被接收端接收到,如圖1所示,目標回波E1.2和第一個脈沖T1沒有處于同一個測量周期,這種情況需要通過MTA處理才能判斷目標回波在第二個測量周期內[3]。由此可以定義: 如果目標回波與激光發射器的脈沖處于同一個測量周期內,稱作MTA 1區; 如果目標回波在激光發射器脈沖的下一個測量周期內,稱作MTA 2區; 如果目標回波在激光發射器脈沖之后的第二個測量周期出現,則稱作MTA 3區(圖2); …,依此類推。
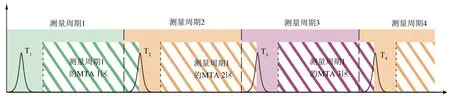
圖2 MTA 的分區
1.3 掃描頻率對MTA的影響
MTA處理技術可以測量距離更遠的目標,但因每個MTA區的脈沖測量周期都相同,這就要對激光掃描儀的操作有如下限制:
1)所有出現的目標回波都應處于所設置的MTA區域內。
2)目標回波不能出現在后幾個測量周期的發射器脈沖發射之前。
3)高電壓通道的強烈回波不能被下一個測量周期的脈沖覆蓋。
為了在不能滿足上述3個條件時掃描儀仍能獲取到有效數據[4],掃描儀的頻率要相互輪流交替[5],這樣會導致相連續的2個脈沖的測量周期也同樣發生變化(圖3)。

(rA為改善后較大的測距范圍; rB為改善后較小的測距范圍; rREF為原有的測距范圍; △r為最小測距距離。)
圖3中:
(2)
(3)
(4)
(5)
式中:PRRREF為激光掃描頻率;PRRMIN為最小激光掃描頻率;PRRMAX為最大激光掃描頻率;PRRA等同于PRRMIN;PRRB等同于PRRMAX。
以VUX-1型激光掃描儀為例,假設掃描頻率PRRREF=380 kHz,最小測量距離△r=3 m代入式(2)―(5)分別得到
(6)
(7)
(8)
(9)
(10)
由于MTA的3個條件的限制,以及掃描頻率的交替變化,MTA區域的掃描范圍定義為
rMTA_ZONE_1_MIN=rMIN=3 m,
(11)
rMTA_ZONE_1_MAX=rB-rOFFSET,
(12)
rMTA_ZONE_2_MIN=rA,
(13)
rMTA_ZONE_2_MAX=rA+rB-rOFFSET,
(14)
式中:rMTA_ZONE_1_MIN為MTA 1區最小測距值;rMTA_ZONE_1_MAX為MTA 1區最大測距值;rOFFSET為發脈器脈沖與測距起始點的距離,此處假設其值為1.5m(圖4);rMTA_ZONE_2_MIN為MTA 2區最小測距值;rMTA_ZONE_2_MAX為MTA 2區最大測距值(圖5)。
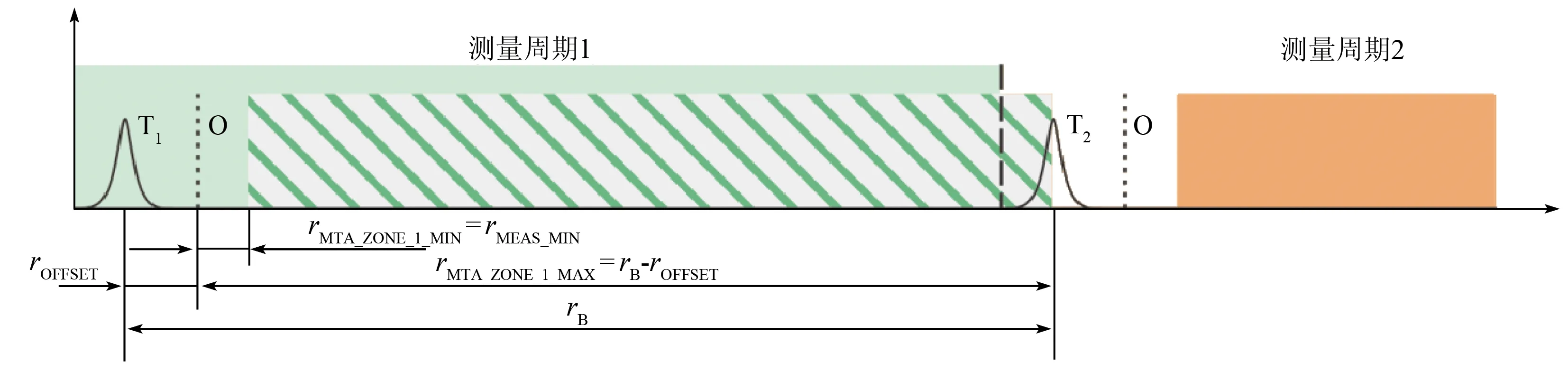
圖4 MTA 1區測距范圍的計算
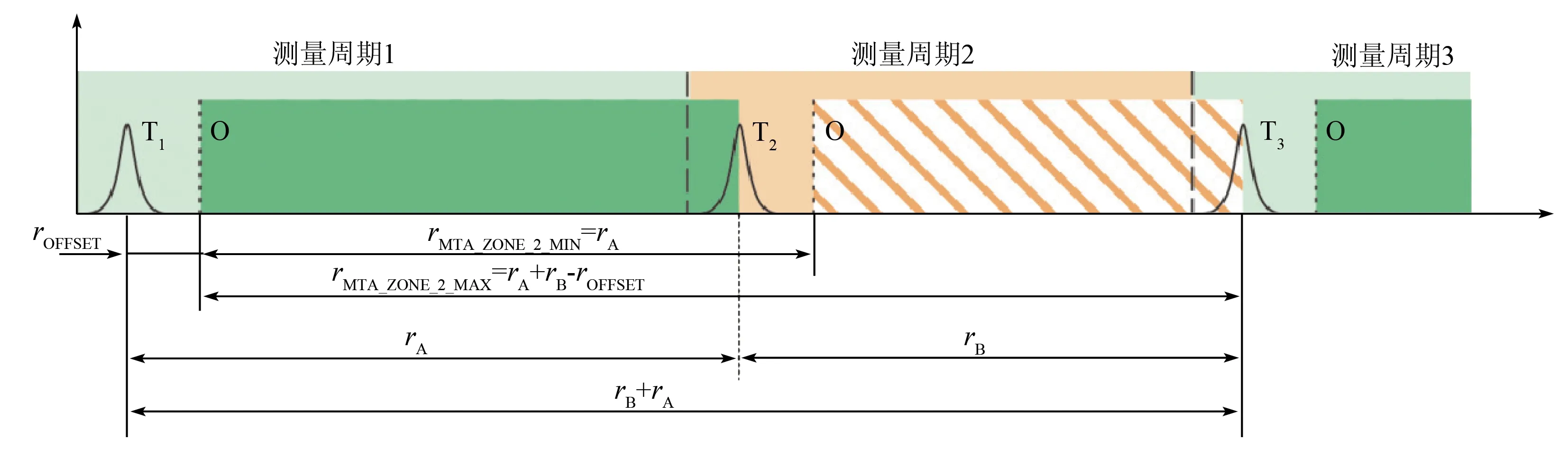
圖5 MTA 2區測距范圍的計算
MTA 1區域的最小測距值是由VUX-1的最小測距范圍確定的,MTA 1區域的最大測距值是由2個連續測量周期的最小測距范圍(即rB)確定的。MTA 2區域的最小測距值是由2個連續測量周期的最大測量范圍(即rA)確定的,MTA 2區域的最大測距值是由兩個相鄰的測距周期測距范圍之和(即rA+rB)確定的。MTA 1與MTA 2的分區界限值如圖6所示。

圖6 MTA分區界限值示意圖
MTA在不同頻率下的界限值見表1。
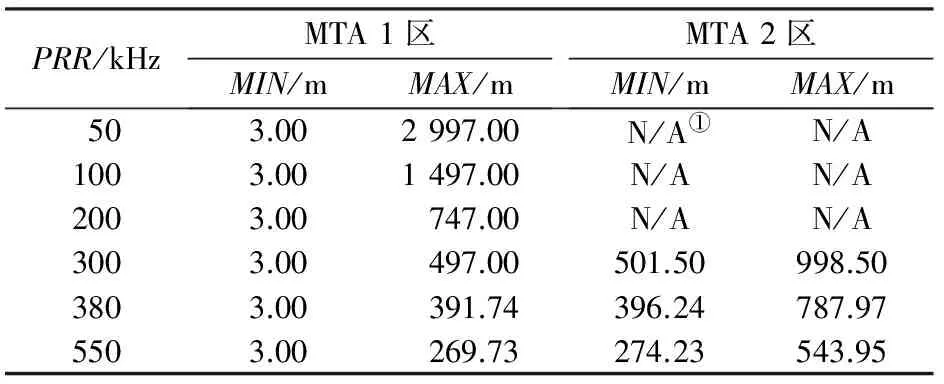
表1 MTA在不同頻率下的界限值
①N/A表示“不適用”,就是在此頻率下不涉及到第二區。
2 航線設計
2.1 測區劃分原則
在飛行作業之前,應當按照地形的類別以及小范圍內高度落差,對整個測區進行多個區域的劃分。具體要求如下:
1)航線敷設和劃分分區時,應根據IMU誤差積累的指標確定每條航線的直線飛行時間。
2)飛行高度的確定應綜合考慮點云密度和精度要求、激光有效距離及飛行安全的要求,同時應考慮激光對人眼的安全性要求。
3)分區應基于激光有效距離及地形起伏等情況進行設計,應考慮基站布設情況以及測區跨帶等問題。
4)平坦地區航線旁向重疊度設計以達到20%為宜(最少為13%),應保證在飛行傾斜姿態變化較大情況下不產生數據覆蓋漏洞,在丘陵地和山區設計時應當適當加大旁向重疊度; 航向起始和結束應超出半個掃描帶寬度,旁向應超出半個掃描帶寬度[6](超出部分控制在500~2 000 m之間)。
2.2 相關參數確定
一般情況下,掃描儀的安裝要保證其掃描方向與飛機前進方向幾乎垂直,對測區進行條帶式掃描。每個相鄰的掃描帶之間要保證有一定的重疊部分,這需要在飛行之前根據測區的地形等因素制定出合理的重疊度,確保所有的掃描帶最終能夠拼接成1景完整的點云圖像[7-8]。圖7示出3條連續采集的掃描帶,每條掃描帶之間的重疊率為25%,箭頭所指的方向為飛機飛行的方向,紅點斜虛線表示每1 s的掃描線。由于飛機在掃描的同時還在向前飛行,導致掃描線并不會完全垂直于飛機飛行的方向。
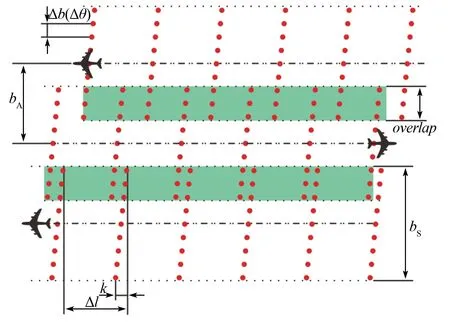
(bS為航帶覆蓋旁向長度; bA為相鄰航線間距; overlap為重疊區域寬度; k為掃描線傾斜因子; △l為相鄰掃描線間距;△b(△θ)為角增量等于△θ時相鄰兩點的點間距;箭頭所指的方向為飛機飛行的方向; 紅點
圖8示出需求解的相關參數。
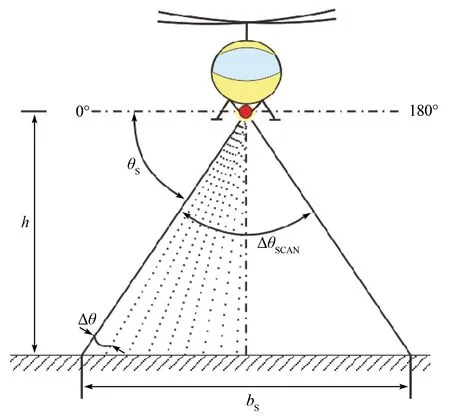
(θS為掃描儀的初始掃描角度; △θ為相鄰脈沖之間的掃描角度增量; ΔθSCAN為掃描角度范圍; bS為掃描帶寬; h為飛機的飛行高度。)
1)掃描帶寬度。假設飛機飛行在地面之上的一個恒定的高度(h),掃描儀的初始掃描角度設為θS,相鄰脈沖之間的掃描角度增量為△θ,掃描角度范圍(等同于視場角)設為△θSCAN,則設掃描帶寬bS為
(15)
2)航帶間距。設掃描帶重疊率為ov,相鄰掃描帶中心線間距(航帶間距)為bA,則
(16)
由于VUX-1型激光掃描儀的旋轉棱鏡只有1個面[8],每旋轉360°出現1條掃描線,并且規定其掃描視場角最大為330°,因此設最大掃描角度范圍為△θSCAN,MAX=330°。因考慮到地面假設是理想的平面,故只針對于0°<△θSCAN<180°范圍內的角度進行計算。很顯然,在起始角度和結束角度的相鄰脈沖點間距最大,在掃描范圍中心線的相鄰脈沖點間距最小。
3)激光腳點間距(旁向)。設在角度等于θ處的點間距為△b(θ),則有
(17)
初始掃描角θS的相鄰脈沖點間距最大,在掃描范圍中心線(θS=90°)的點間距最小。
最大點間距的求解公式為

(18)
最小點間距(θS=90°)的求解公式為
△bMIN(△θ)=htan(△θ);
(19)
平均點間距(△bAVG)的求解公式為
(20)
為了安全起見,應當保證最大點間距也符合方案所要求的△b,其求解公式為
(21)
4)掃描線速度。根據計算出的△θ和激光掃描頻率(PRR),可以求得激光掃描線速度,即
(22)
5)飛行速度(地速)。設掃描線間距為△l,一般設置為△l=△b,以保證點云腳點的等間距均勻分布。根據上述條件,可解算出飛機的飛行速度VF,即
VF=fSCAN△l。
(23)
2.3 目標最值確定
由于測距閾值、MTA等對最小測距與最大測距的限制,在制定航線設計方案中應當考慮到目標物的最小距離(rMIN)與最大距離(rMAX)是否在測距范圍之內。目標的最大距離與最小距離與下列參數有關: 掃描儀的掃描起始角度θS、掃描儀的掃描終止角度θE(θE=θS+△θSCAN)、飛機的飛行高度h、飛機的側滾角ρ、飛機的俯仰角以及測區的地形類型。圖9示出目標距離求解的示意圖。
假設飛機的飛行高度處于飛機的最小與最大飛行高度之間,飛機的俯仰角為0°,地形近似于平原。
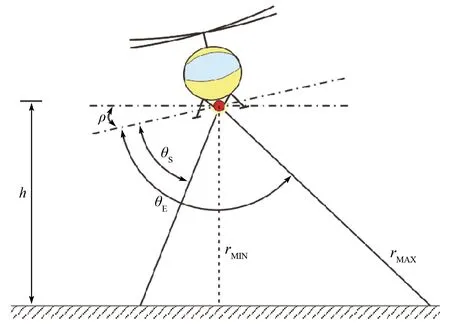
圖9 目標距離求解示意圖
1)最小值確定。如圖9所示,當激光脈沖垂直于地面發射時,所采集到的目標距離是最短的,這個距離等同于飛機的飛行高度,即
rMIN=h。
(24)
2)最大值確定。有時飛機因受側面氣流或傾斜轉彎的影響,其側滾角會發生改變,視場角的中心線就不會完全垂直于地面,而是存在角度ρ的變化。這時的目標最大距離與最小距離就要重新計算,即
(25)
(26)
rMAX=MAX(rMAXρ+,rMAXρ-)。
(27)
由于所有測量的目標距離一定要在設置好的MTA區域中,因此在起飛之前計算好目標距離的范圍是非常有必要的。
3 實例驗證
3.1 實驗方案
假設: 掃描頻率PRR=380 kHz,點密度為20 pts/m2,掃描視場角△θscan=120°,飛行速度VF=30 m/s,側滾角ρ=±5°,旁向重疊率為20%。這里的點密度指的是點云的均勻點密度,即點云的旁向點間距與航向點間距(相鄰掃描線的距離)相等(△l=△bAVG)。
將式(20)和(23)聯立可得fSCAN=134 lines/s,h=60 m。根據式(15)可得bS=207 m。根據式(16)可得bA=166 m。根據式(11)―(14)可得MTA 1區范圍為3~289.5 m,MTA 2區范圍為395.5~785 m。根據公式(24)和(27)可得rMIN=60 m,rMAX=142 m。
通過計算結果可以得出,目標的最大、最小距離均在MTA 1區內,這個方案在平原地區可以進行小范圍飛行。
3.2 方案實施
本文航線設計方案實施的位置選擇在黑龍江省齊齊哈爾市的克山縣,飛行軌跡如圖10所示。
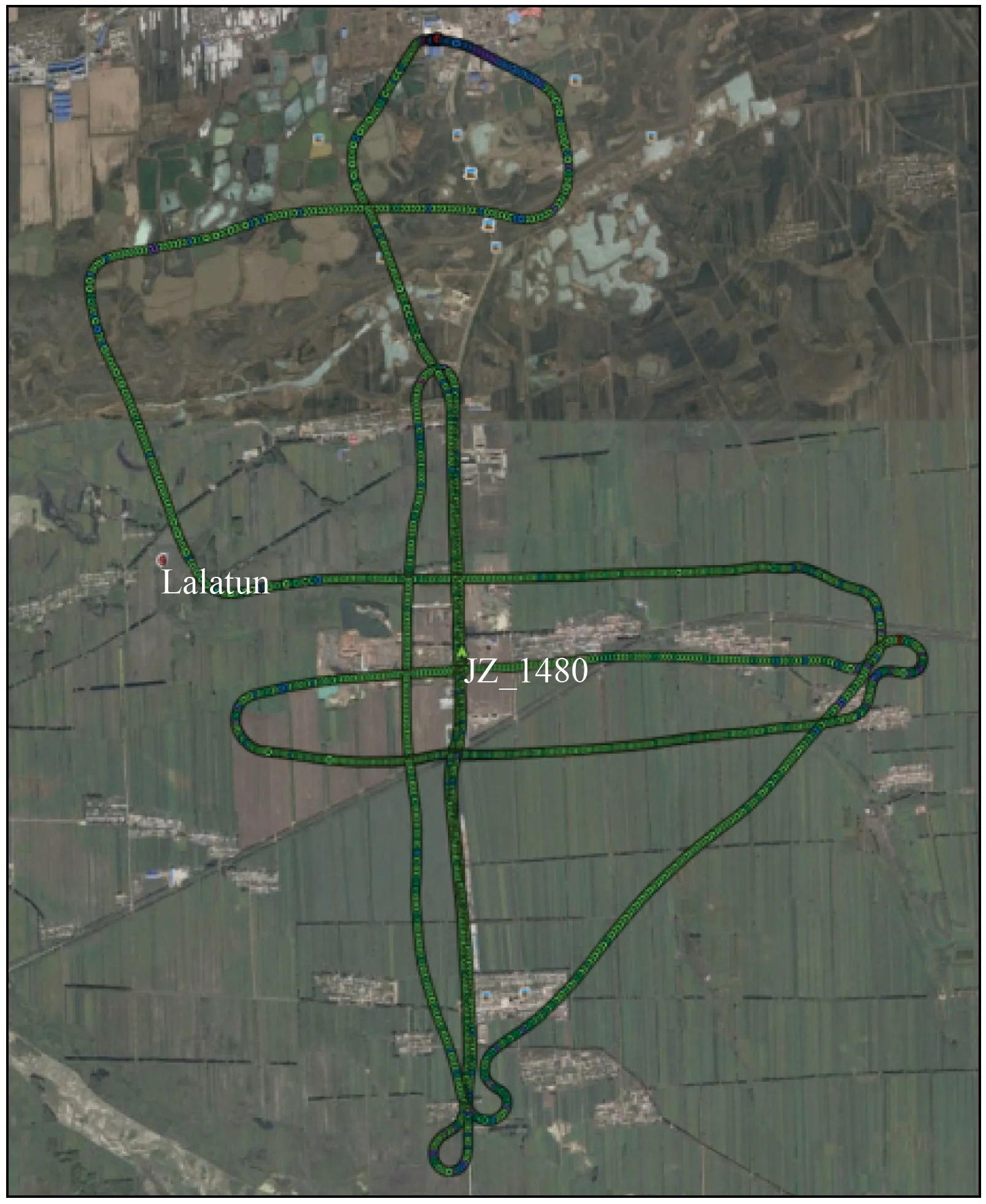
(綠色線為飛行軌跡,綠色表示GPS信號良好)
3.3 結果分析
圖11示出航向和旁向點間距的平均誤差分布情況。
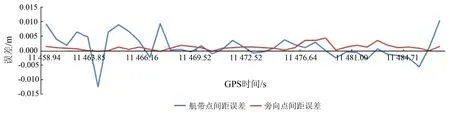
圖11 點間距的平均誤差
航向點間距在11 463.85 s時誤差出現負值,這主要是由于低空風切變導致俯仰角變化,致使航向點間距變小。旁向點間距實測值要普遍大于理論值,這是由于理論值的相對航高選取的是路基與飛機的高度差,而實際平均相對高度要大于理論值。
4 結論
1)本文對采用多周期回波(MTA)技術的激光掃描儀進行了詳細分析。主要技術流程是首先求解出激光掃描儀在不同掃描頻率下相應的測量范圍、MTA區域范圍以及因飛機側滾角帶來的測距范圍的變化; 再根據要求的點密度和重疊率分別推算出飛機的飛行速度、掃描儀的掃描頻率、掃描儀的掃描線速度、掃描帶寬度等參數。
2)實驗結果表明,航向點間距可控制在13 mm之內,旁向點間距可控制在5 mm之內; 航向誤差百分比為5.8%,旁向誤差百分比為2.4%。點密度符合機載激光雷達數據獲取規范要求的20 pts/m2。
本文的不足之處在于所選擇的參考面為理想的平面而不是實際測區地面的真實模型,這對于平原區域影響較小,而對于山區來說影響較大; 對于山區地形點云的采集密度應適當加密,從而在數據后處理時能夠更真實地反映其地表。此外,由于山區地形忽高忽低,也會對相鄰航帶的重疊度造成影響。以上2個問題都是今后要重點解決的。
[1] Dashora,Lohani B,Deb K.Two-step procedure of optimization for flight planning problem for airborne LiDAR data acquisition[J].International Journal of Mathematical Modelling and Numerical Optimisation,2013,4(4):323-350.
[2] 楊曉,孫釗.自觸發脈沖激光測距飛行時間測量研究[J].電子設計工程,2012,20(1):110-112. Yang X,Sun Z.Study on time-of-flight measurement of self-triggering pulsed laser ranging[J].Electronic Design Engineering,2012,20(1):110-112.
[3] 陳千頌,趙大龍,楊成偉,等.自觸發脈沖飛行時間激光測距技術研究[J].中國激光,2004,31(6):745-748. Chen Q S,Zhao D L,Yang C W,et al.Study on self-triggering pulsed time-of-flight laser rangefinding[J].Chinese Journal of Lasers,2004,31(6):745-748.
[4] Airborne Laser Scanner LMS-Q680(i) General Description[Z].Austria,2010.
[5] UAS/UAV Laser Scanner Riegl VUX-1 General Description and Data Interfaces[Z].Austria,2015.
[6] 國家測繪地理信息局.CH/T 8024—2011機載激光雷達數據獲取技術規范[S].北京:測繪出版社,2012. National Bureau of Surveying and Mapping Geographic Information.CH/T 8024—2011 Specifications for Data Acquisition of Airborne LIDAR[S].Beijing:Surveying and Mapping Publishing House,2012.
[7] 賴旭東.機載激光雷達基礎原理與應用[M].北京:電子工業出版社,2010. Lai X D.Basic Principles and Applications of Airborne LiDAR[M].Beijing:Electronic Industry Press,2010.
[8] Lohani B.Airborne Altimetric LiDAR:Principle, Data Collection,Processing and Applications[D].Kanpur:IIT Kanpur,2012.
[9] Jiang H B,Su Y Y,Jiao Q S,et al.Typical geologic disaster surveying in Wenchuan 8.0 earthquake zone using high resolution ground LiDAR and UAV remote sensing[C]//Proceedings of SPIE 9262,Lidar Remote Sensing for Environmental Monitoring XIV.Beijing,China:SPIE,2014:926219.
(責任編輯: 劉心季)
Route design of light airborne LiDAR
LI Jiajun1,2, ZHONG Ruofei1,2
(1.CollegeofResourceEnvironmentandTourism,CapitalNormalUniversity,Beijing100048,China; 2.KeyLaboratoryof3DInformationAcquisitionandApplication,MinistryofEducation,CapitalNormalUniversity,Beijing100048,China)
In this paper, the model VUX-1 laser was used as an example to calculate the influence of multitimearound(MTA) on the height of the aircraft. Then according to the requirements of the point cloud density, scanning frequency, scanning speed and other indicators, and in accordance with the principle of air aerial photogrammetry and LiDAR data acquisition specification, the difference between traditional photogrammetry and airborne LiDAR was distinguished, and a cue from traditional photogrammetry was used for reference. The changes of laser range under different conditions, such as the different types of targets in the test area,the different types of targets and the variation of the most remote ranging capability, were determined. By taking into account the above problems,a route for the airborne LiDAR system was designed. At last, the across track point spacing and the along track point spacing were calculated respectively for analyzing the reasons and determining the feasibility of the route design scheme.
airborne LiDAR; point cloud; overlap rate; multi time around(MTA); route design; measurement range
10.6046/gtzyyg.2017.02.14
李佳俊,鐘若飛.輕小型機載LiDAR的航線設計[J].國土資源遙感,2017,29(2):97-103.(Li J J,Zhong R F.Route design of light airborne LiDAR[J].Remote Sensing for Land and Resources,2017,29(2):97-103.)
2015-11-10;
2015-12-19
國家自然科學基金項目“基于結構特征的車載激光掃描系統外方位元素在線標定方法研究”(編號: 41371434)和測繪地理信息公益性行業科研專項項目“新一代多平臺多波段移動信息采集系統研制”(編號: 201412020)共同資助。
李佳俊(1990-),男,碩士研究生,主要研究方向為車載、機載、船載移動測量系統集成和應用。Email: 1162077712@qq.com。
TP 79; P 237
A
1001-070X(2017)02-0097-07
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
