磁懸浮球控制系統的仿真研究
2017-04-28 01:12:39王玲玲
兵器裝備工程學報 2017年4期
王玲玲,王 宏,梁 勇
(海軍航空工程學院,山東 煙臺 264000)
?
【信息科學與控制工程】
磁懸浮球控制系統的仿真研究
王玲玲,王 宏,梁 勇
(海軍航空工程學院,山東 煙臺 264000)
針對磁懸浮球系統的本質不穩定性,設計PID控制算法實現系統的穩定控制。建立磁懸浮球系統的動力學模型,并對其中的非線性部分進行平衡點處的線性化,采用根軌跡校正設計超前滯后控制器。最后采用PID控制設計,并使用根軌跡校正中零極點對系統性能影響的思想去調整PID參數,使系統的穩定性、動態性能和穩態性能滿足要求。
磁懸浮球系統;PID;根軌跡法;校正
磁懸浮可以用于實現各種機械結構的高速、無摩擦運轉,如高速磁懸浮列車、高速磁懸浮電機、磁懸浮軸承等。盡管磁懸浮的應用領域繁多,系統形式和結構各不相同,但究其本質都具有本質非線性、不確定性、開環不確定性等特征。這些特征增加了對其控制的難度,也正是由于磁懸浮的這些特性,使其更加具有研究價值和意義。本文針對磁懸浮球系統,研究其穩定控制,并使其性能指標滿足要求。
1 磁懸浮球控制系統的基本原理
磁懸浮球控制系統主要由鐵芯、線圈、光電源、位置傳感器、放大及補償裝置、數字控制器和控制對象鋼球等部件組成[1],如圖1所示。
當電磁鐵上的線圈繞組通電時,位于磁場中的剛體受到電磁力的吸引作用。當產生的電磁力與球體的重力相等時,球體懸浮于空中,處于不穩定的平衡狀態,當它受到外界擾動時,易失去平衡。因此,為了使系統穩定,就必須加上反饋環節,實現閉環控制,并設計控制算法,使穩定后的性能滿足要求。
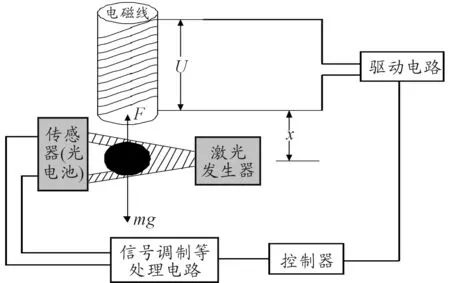
圖1 磁懸浮球系統示意圖
2 系統數學模型的建立
2.1 理論分析
如果忽略電磁鐵的感抗對系統的影響,磁懸浮系統的數學模型可以完全由豎直方向運動方程和電磁力方程給出:
(1)
式中取向下方向為正。
(2)
F(i,x)為電磁力且為矢量(N);x為小球質心到電磁鐵磁極表面的瞬時氣隙(m);i為電磁鐵繞組中的瞬時電流(A);m為小球質量(kg)。
式(2)中,假設磁通在氣隙處均勻分布,且電磁鐵與球體組成的磁路的磁阻主要集中在氣隙處;常系數K為與空氣磁導濾等定參數相關的量[1-3]。
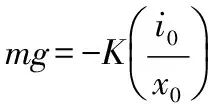
假設平衡點處小球的位移為x0,電磁鐵線圈電流為i0,則平衡點處:
(3)
2.2 系統模型的線性化處理
對式(2)進行平衡點處的泰勒展開并線性化有
(4)
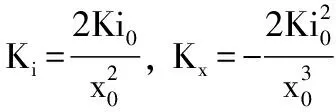
當定義系統輸入量為電流,輸出量為氣隙,對上式兩端進行拉式變換可得傳遞函數模型為
(5)
在實際系統中采用電壓值表示對氣隙和電流的控制,其中電壓與氣隙的關系需要通過傳感器標定得出,其關系式為
Uo=Ksx
(6)
其中Ks為氣隙與電壓的關系系數(V/mm)。
而電壓和電流的關系采用電壓-電流型功率放大器表示,在功率放大器的線性范圍內,可以將這種電壓電流關系表示為:
(7)
其中,Ka為功率放大器的增益。
如此結合式(6)與式(7),氣隙-電流模型式(5)變為
(8)
(9)
(10)
2.3 實際物理參數
表1給出具體參數值,當實驗系統不同時,參數要重新測量。另外,即便針對同一套系統,如果更改平衡位置時,帶有符號*的參數要根據實際進行測量和計算[1-3]。
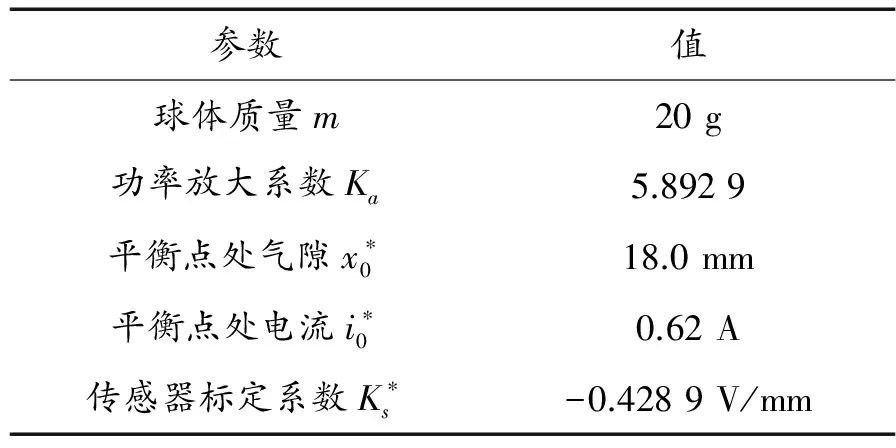
表1 系統的物理參數值
將參數代入式(9)與式(10)得到
(11)
(12)
可以看出系統有一個極點位于復平面的右半平面,根據系統穩定性判據,磁懸浮球系統是本質不穩定的。在Matlab中進行編程判斷系統的可控性和可觀性[4-7],可以得到系統的可控矩陣和可觀矩陣的秩為2,即系統狀態可控矩陣的秩等于系統的狀態變量維數,系統的輸出可控矩陣的秩等于系統輸出向量的維數,所以磁懸浮實驗系統既是可控又是可觀,因此可以對系統進行控制器設計,使系統穩定。
3 根軌跡控制設計
當系統的性能指標以時域指標提出時,可以借助根軌跡曲線獲取校正裝置的結構和參數。若期望主導極點在原根軌跡的左側,則采用相位超前校正;若期望主導極點在原根軌跡上,則通過調整根軌跡增益,滿足靜態性能要求;若期望主導極點在原根軌跡的右側,則采用相位滯后校正[8]。
3.1 使用根軌跡法設計磁懸浮球系統控制器
3.1.1 超前控制器的設計
設計控制器使得校正后的系統滿足如下要求:調節時間ts≤0.2 s(2%);超調量σ≤10%;穩態精度階躍輸入下ess≤0.05。按照超前校正的步驟,通過Matlab編程得到系統的串聯超前校正控制器為
(13)
令輸入為單位階躍,得系統根軌跡如圖2,單位階躍響應如圖3。
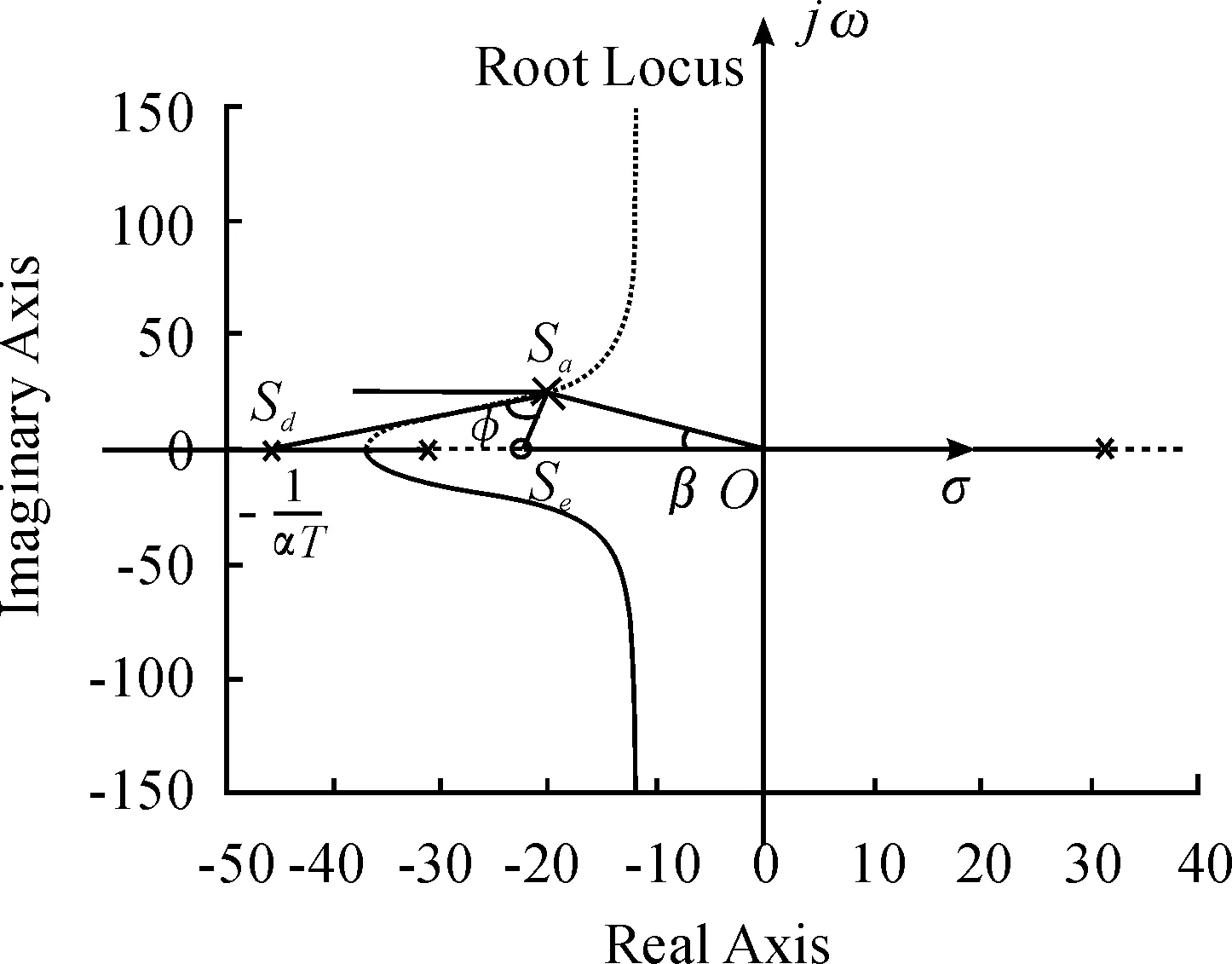
圖2 磁懸浮系統超前校正后的根軌跡
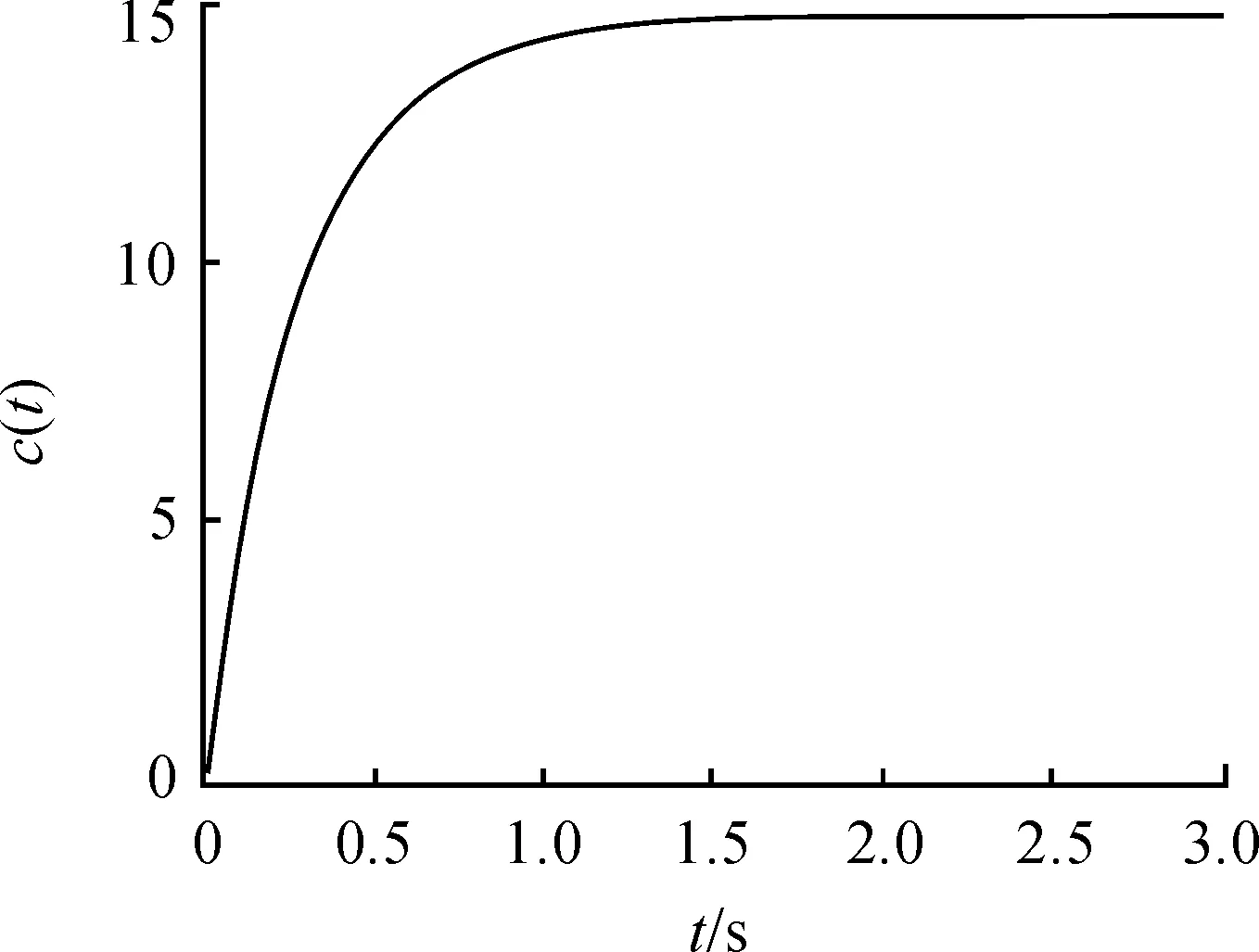
圖3 一次超前校正后的單位階躍響應
通過系統的階躍響應可以分析得出:
1) 系統無超調,調節時間大約需要1.5 s,系統的穩態誤差較大;
2) 在10%的超調要求下可設計出校正環節階躍響應無超調,說明超前校正對系統的動態性能具有較好的調節作用。但過于平滑的過渡過程使系統的調節時間變慢,因此可以考慮適當降低過渡過程平穩性,使系統的調節過程加快;
3) 系統的靜態誤差較大,超前對于穩態誤差的改善較弱,可以采用滯后裝置改善。
3.1.2 滯后控制器的設計
通過上述一次超前校正,控制系統開環傳函為
根據穩態指標的系統的靜態誤差系數K0≈20;代入滯后校正的設計公式
(14)
可得到b=0.053 64。
選取T值,可得到滯后網絡傳遞函數。取T=3時,系統的根軌跡如圖4。
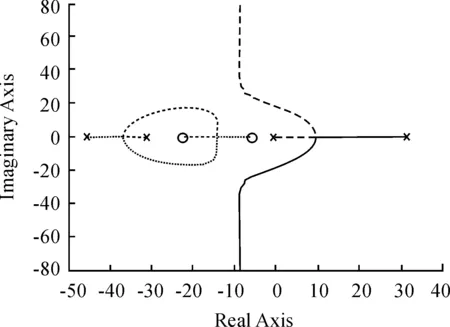
圖4 超前滯后校正后的根軌跡
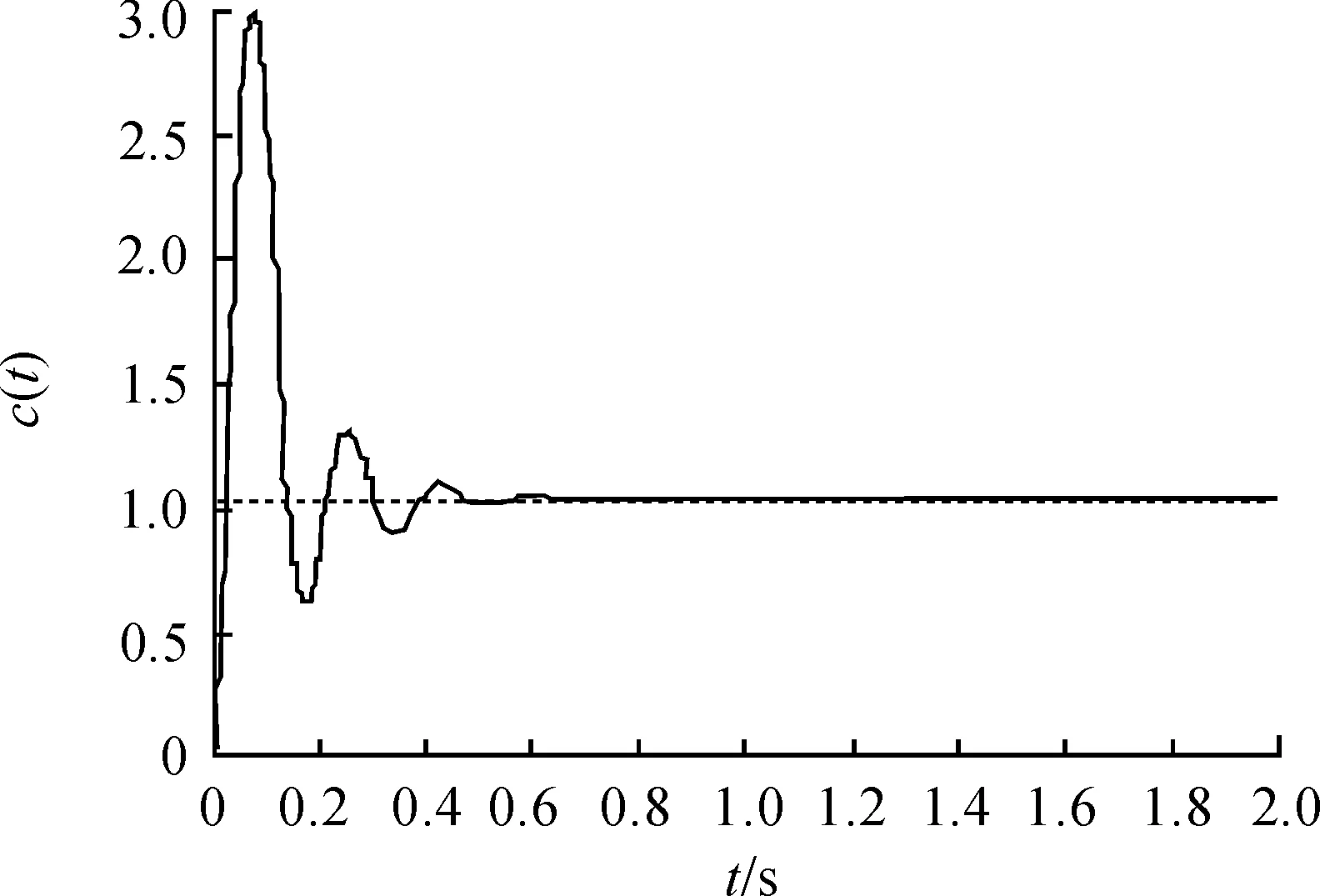
圖5 多次超前滯后校正的單位階躍響應

另外,在實際設計超前滯后網絡時,應將其作為一個元部件設計,而不是把超前校正和滯后校正作為分離元件分別引入。
4 PID控制器的設計
利用Matlab中的Simulink設計含有PID控制器的閉環控制系統。其中,Kp為比例參數,Ki為積分參數,Kd為微分參數。
根據PID參數校正的方式,先將積分微分系數設為零,只調比例環節。當輸出由發散調至等幅振蕩時,Kp=0.6,如圖6所示。從圖中可以看出,在5 s內有約13.5個周期,故周期約為Pcr=6 s/13.5≈0.44 s。
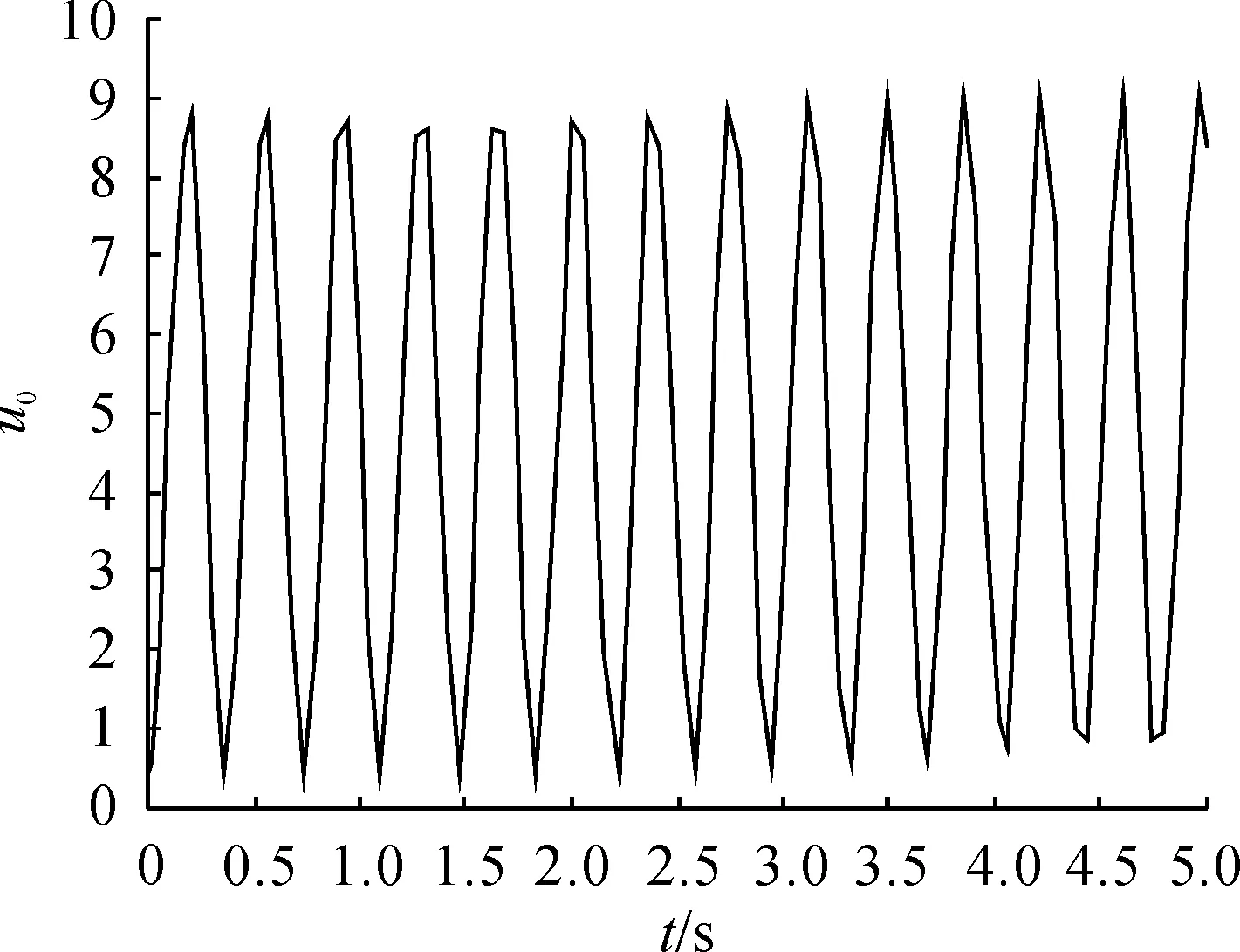
圖6 Kp=0.6時的系統仿真圖

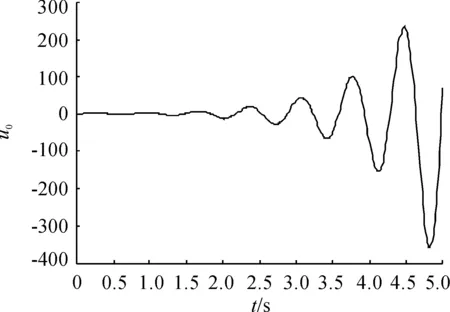
圖7 Kp=0.36、Ki=4.55、Kd=0.055時
通過分析知道,PID控制器傳函可以表示為
(15)
所增加的積分環節可以調整系統的穩態性能,增加兩個開環零點可以調整系統的動態性能。其零點公式為
(16)
讓附加的開環零點遠離虛軸,最直接的方式就是增大Kp。當Kp增大至1.5時,系統響應曲線如圖9所示,此時系統的超調過大。根據PID參數調節規則繼續調節參數,當Kp=30,Ki=7,Kd=0.1時,系統仿真曲線如圖10所示,系統的性能指標達到要求。
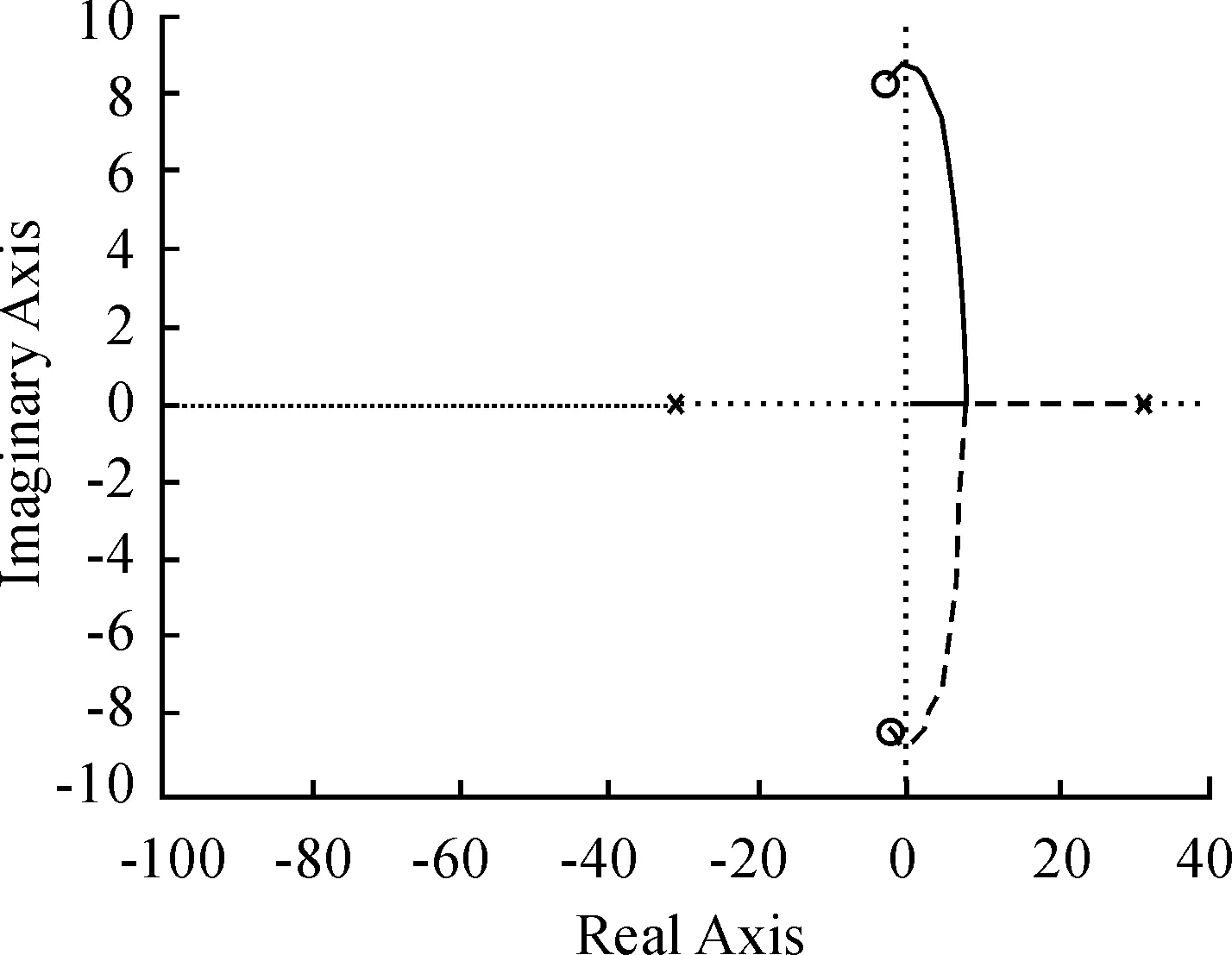
圖8 Kp=0.36、Ki=4.55、Kd=0.055根軌跡圖
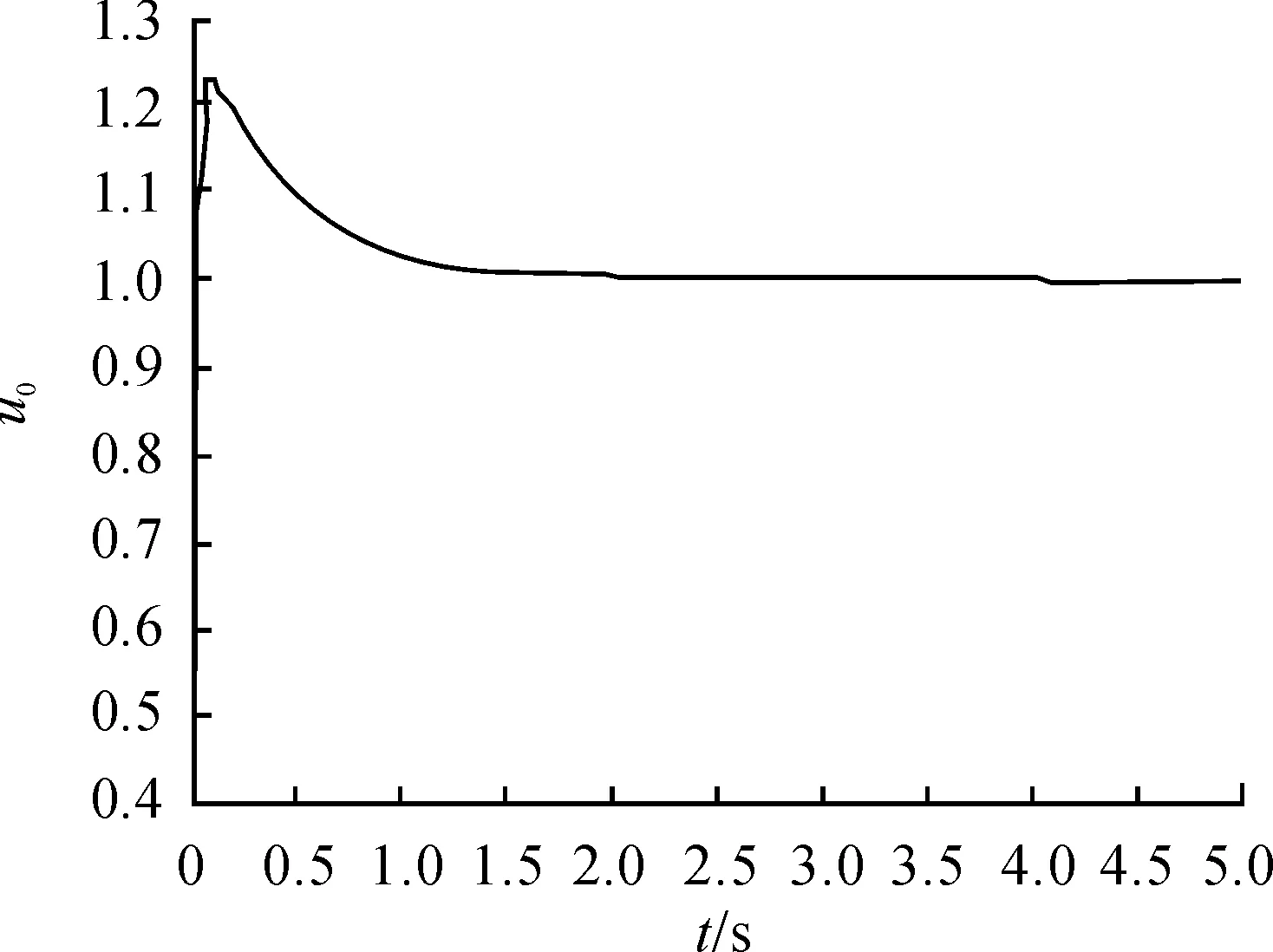
圖9 Kp=1.5、Ki=4.55、Kd=0.055仿真圖

圖10 Kp=30、Ki=7、Kd=0.1仿真曲線
將上述參數代入實驗系統進行仿真,得到圖11所示的仿真曲線,可以看出磁懸浮球系統在PID控制下可以實現穩定控制,終值范圍在±0.01 mm間波動。當系統受到擾動時,可很快回復到平衡位置。
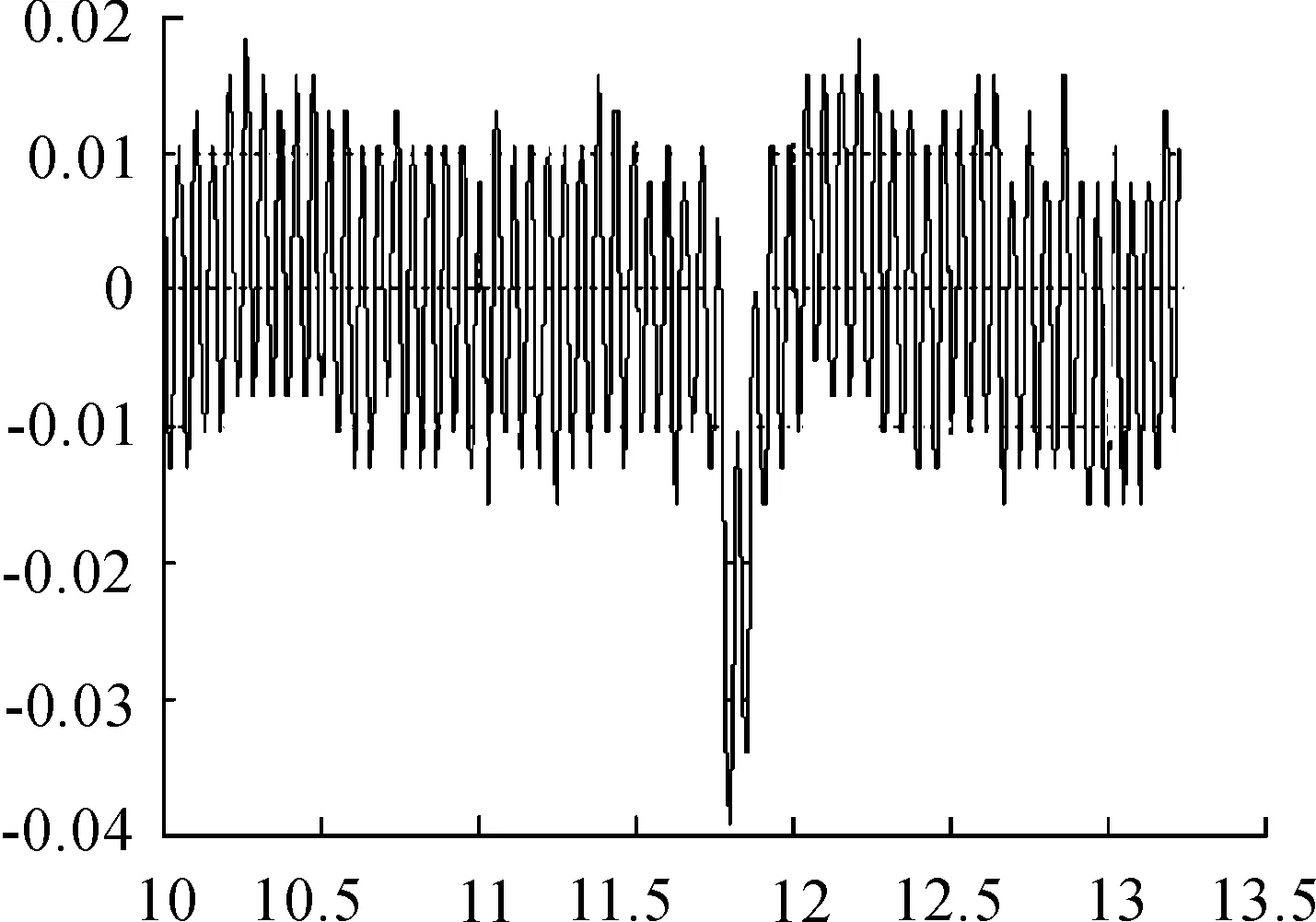
圖11 磁懸浮球系統的半實物仿真曲線
5 結論
本文分析了磁懸浮球系統模型,并使用根軌跡方法進行了超前滯后控制器的設計。仿真表明超前滯后控制器僅可改善系統的穩定性,很難大幅改善動態性能。以根軌跡中開環零極點對系統性能影響的思路,設計PID控制器并進行參數調試,可以快速調整系統性能至最佳。
[1] 磁懸浮實驗裝置[R].固高科技(深圳)有限公司,2006.
[2] 張震.磁懸浮系統若干控制算法研究[D].上海:上海交通大學,2004年.
[3] 薛煒杰.基于MATLAB的磁懸浮控制系統研究[D].沈陽:東北大學,2008年.
[4] 張波,湯炳新.基于MatLab的磁懸浮球控制系統的設計[J].河海大學常州分校學報,2005,19(1):47-49.
[5] 張占軍,林小玲.磁懸浮球系統控制器的分析設計[J].機電工程,2007,24(1):19-21.
[6] 呂輝榜,劉小靜,盧長明.基于MATLAB的磁懸浮球實時控制設計及實驗研究[J].儀表技術與傳感器,2009(5):50-52.
[7] 彭輝,徐錦華,侯海良.模糊控制在磁懸浮球系統實時控制中的應用[J].控制工程,2009,16(3):278-281.
[8] KATSUHIKO OGATA.現代控制工程[M].4版.北京:電子工業出版社,2013.
(責任編輯 楊繼森)
Simulation and Research of Magnetic Levitation Ball Control System
WANG Ling-ling, WANG Hong, LIANG Yong
(Naval Aeronautical and Astronautical University, Yantai 264000, China)
In order to solve the nature unstable feature of the magnetic levitation ball system, PID control algorithm was designed to realize the stability of the system. But traditional method for parameters adjustments had some subjectivity. Firstly, the dynamic model of the magnetic levitation ball system was established, and the nonlinear part of the system was linearized at the equilibrium point. Then the root locus method was used to design the lead lag compensator, and it was shown by the simulation results that the dynamic performance was difficult to meet the demands, although it can be stable. Thus PID control was adopted. And the thinking of the influence of open loop zeros and poles on root locus was adopted to correct parameters, which made the parameters adjustments have guidance. Finally the system was compensated to meet the requirements for stability, accuracy and swiftness.
magnetic levitation ball system; PID; root locus method; compensation
2016-11-26;
2016-12-26 作者簡介:王玲玲(1984—),女,碩士,講師,主要從事控制技術研究。
10.11809/scbgxb2017.04.027
王玲玲,王宏,梁勇.磁懸浮球控制系統的仿真研究[J].兵器裝備工程學報,2017(4):122-126.
format:WANG Ling-ling, WANG Hong, LIANG Yong.Simulation and Research of Magnetic Levitation Ball Control System[J].Journal of Ordnance Equipment Engineering,2017(4):122-126.
TP27
A
2096-2304(2017)04-0122-05
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
