采用有效信號段自提取算法識別結(jié)構(gòu)多損傷位置
2017-04-19 09:31:35歐陽青華劉曉同
哈爾濱工業(yè)大學(xué)學(xué)報 2017年4期
歐陽青華,周 麗,劉曉同
(機(jī)械結(jié)構(gòu)力學(xué)及控制國家重點(diǎn)實(shí)驗(yàn)室(南京航空航天大學(xué)),南京210016)
采用有效信號段自提取算法識別結(jié)構(gòu)多損傷位置
歐陽青華,周 麗,劉曉同
(機(jī)械結(jié)構(gòu)力學(xué)及控制國家重點(diǎn)實(shí)驗(yàn)室(南京航空航天大學(xué)),南京210016)
為識別結(jié)構(gòu)中的多處損傷,提出了一種采用有效Lamb波信號段自提取算法計(jì)算結(jié)構(gòu)損傷指標(biāo)的多損傷識別成像方法.該方法將結(jié)構(gòu)的待檢測區(qū)域劃分為數(shù)個子區(qū)域,并根據(jù)Lamb波的傳播時間和波速從傳感器接收到的信號中自動提取出包含結(jié)構(gòu)信息的有效信號.以該有效信號作為輸入,計(jì)算每個子區(qū)域中基于信號相關(guān)系數(shù)所獲得的損傷指標(biāo),最后采用RAPID算法對全部識別區(qū)域內(nèi)的損傷位置進(jìn)行識別和成像.以航空鋁板為研究對象進(jìn)行了實(shí)驗(yàn)驗(yàn)證研究,結(jié)果表明,該方法能快速有效地識別出多個損傷,并較為準(zhǔn)確地實(shí)現(xiàn)損傷成像以描述損傷的位置.
結(jié)構(gòu)健康監(jiān)測;壓電傳感器;Lamb波;相關(guān)系數(shù);多損傷識別;損傷成像
航空金屬結(jié)構(gòu)在服役過程中會出現(xiàn)各種形式的損傷,其中以裂紋和腐蝕最為嚴(yán)重.若不能及時發(fā)現(xiàn)這些損傷,將會嚴(yán)重影響飛行器的飛行安全.利用結(jié)構(gòu)健康監(jiān)測技術(shù)可以實(shí)時監(jiān)測結(jié)構(gòu)的健康狀態(tài),及時發(fā)現(xiàn)損傷的存在,避免災(zāi)難的發(fā)生.Lamb 波對損傷較為敏感,并且還可以發(fā)展成像技術(shù)將損傷的位置顯示出來.因此,利用 Lamb 波技術(shù)識別損傷成為當(dāng)前結(jié)構(gòu)健康監(jiān)測領(lǐng)域的熱點(diǎn)之一.偏移法[1-2]、時間反轉(zhuǎn)法[3]、相控陣法[4]等成像方法利用信號的傳播時間,對損傷進(jìn)行定位,進(jìn)而利用成像算法對損傷進(jìn)行成像.但是Lamb波的多模態(tài)轉(zhuǎn)換以及彌散特性增加了精確提取Lamb波損傷信號傳播時間的難度.為了保證提取到的Lamb波損傷信號傳播時間的精度,需要運(yùn)用小波變換[5-6]、Hilbert-Huang變換[7-8]等時頻分析方法對信號進(jìn)行處理.為避免提取損傷信號傳播時間帶來的復(fù)雜信號處理方法,Hay等[9-10]在傳統(tǒng)CT成像的基礎(chǔ)上,提出了一種基于損傷存在概率的成像算法,稱為RAPID(reconstruction algorithm for probabilistic inspection of damage).該方法通過比較結(jié)構(gòu)損傷前后的Lamb波信號的相關(guān)系數(shù)得到一組損傷指標(biāo)(damage index, DI)來評估損傷存在的概率,然后對損傷進(jìn)行快速、準(zhǔn)確成像.但是該方法使用等長度的信號段參與計(jì)算相關(guān)系數(shù),得到的損傷指標(biāo)也與信號段的長度有關(guān).信號段長度較短時,可能只包含較少的有效信號;信號段長度較長時,可能包含了較多的無關(guān)信號.信號段長度過短或過長都會影響著基于信號相關(guān)系數(shù)計(jì)算的損傷指標(biāo),將有可能出現(xiàn)損傷識別虛假和識別不明顯的現(xiàn)象.
本文提出了一種有效信號段自提取算法來識別多損傷的方法.先將待檢測結(jié)構(gòu)進(jìn)行區(qū)域分割,然后根據(jù)壓電傳感器間的距離和Lamb波的波速,自動計(jì)算并提取出接收傳感器接收到的有效信號段.利用提取出的有效信號段計(jì)算基于信號相關(guān)系數(shù)的損傷指標(biāo),最后利用RAPID算法將損傷的位置成像出來.本文提出的有效信號段自提取算法克服了等長度信號段參與多損傷成像可能帶來的識別不準(zhǔn)確的缺點(diǎn).鋁板實(shí)驗(yàn)結(jié)果驗(yàn)證了所提方法在多損傷成像中應(yīng)用的可行性和有效性.
1 有效信號段自提取算法
在激勵傳感器激勵出Lamb波時,接收傳感器便同時開始接收信號.但是,Lamb波從激勵到被接收,有一段在結(jié)構(gòu)中傳播的時間,這段時間理論上表現(xiàn)在接收信號中就是一段幅值為0的信號段.由于實(shí)際環(huán)境中噪聲、信號干擾的影響,實(shí)際這段信號的幅值通常不為0.但信號噪聲通常頻率相對較低,Lamb波為高頻激勵信號,可以通過濾波去除噪聲.這個信號段在計(jì)算信號相關(guān)系數(shù)時因?yàn)椴粩y帶任何與結(jié)構(gòu)有關(guān)的信息,可以被認(rèn)為是無關(guān)信號.同理,Lamb波傳播到邊界或者其他傳感器時, Lamb波的模態(tài)會發(fā)生轉(zhuǎn)變,甚至出現(xiàn)信號混疊等現(xiàn)象,較為復(fù)雜,難以處理.因此這段信號對于計(jì)算信號相關(guān)系數(shù)是不利的,也是無關(guān)的.所以,實(shí)際的有效信號段就是在檢測范圍內(nèi),從接收傳感器接收到Lamb波到接收傳感器接收完Lamb波的這段信號.也就是接收傳感器在采集時間內(nèi)采集到的信號去掉無關(guān)信號后,截取出來的信號.這段有效信號包含了Lamb波在無損結(jié)構(gòu)中傳播的信號和結(jié)構(gòu)遇到損傷時的散射信號.
當(dāng)以較短的信號段參與損傷指標(biāo)的計(jì)算時,距離激勵傳感器較遠(yuǎn)的接收傳感器接收到的信號中可能會缺失一部分有效信號;若以較長的信號段參與損傷指標(biāo)的計(jì)算,距離激勵傳感器較近的接收傳感器接收到的信號中可能會包含較多的無關(guān)信號.因此,信號段長度過短或者過長都不利于基于信號相關(guān)系數(shù)的損傷指標(biāo)的計(jì)算.信號中攜帶結(jié)構(gòu)損傷信息的有效信號越多,得出的信號相關(guān)系數(shù)就越有效,損傷指標(biāo)也就越準(zhǔn)確.接收傳感器在接收到Lamb波之前采集到的信號和從邊界反射回來的信號都屬于無關(guān)信號,這種無關(guān)信號越少,對損傷指標(biāo)的不利影響也就越小.采用等長度信號段來得到損傷指標(biāo)時,改變信號段的長度,就會改變參與計(jì)算的信號段中的有效信號段和無關(guān)信號段的長度,使得基于信號相關(guān)系數(shù)的損傷指標(biāo)發(fā)生改變,損傷識別結(jié)果中將有可能出現(xiàn)損傷識別虛假和識別不明顯的現(xiàn)象.針對等長度信號段參與計(jì)算的不足,提出了一種有效信號段自提取的算法.
該有效信號段自提取算法的提取關(guān)鍵參數(shù)就是接收傳感器接收到Lamb波的時刻和完全接收完不包括邊界和其他傳感器反射的Lamb波的時刻.因此在傳感器布置時,應(yīng)考慮傳感器之間的距離和傳感器與邊界的距離,即要求速度最快的S0波從激勵傳感器出發(fā),經(jīng)邊界或相鄰傳感器反射到接收傳感器所需的時間盡可能地多于速度最慢的A0波從出發(fā)到接收完全所需要的時間.根據(jù)Lamb波在結(jié)構(gòu)的傳播速度,結(jié)合壓電傳感器之間的距離,計(jì)算速度最快的S0波從出發(fā)到剛接收所需要的時間,轉(zhuǎn)化為相對應(yīng)的信號采集點(diǎn)數(shù)m1,計(jì)算速度最慢的A0波從出發(fā)到剛接收所需要的時間,轉(zhuǎn)化為相對應(yīng)的信號采集點(diǎn)數(shù)m2,并補(bǔ)償Lamb波的波寬長度對應(yīng)的信號采集點(diǎn)數(shù)n,為減小誤差,乘以一個放大倍數(shù)q.對采集到的信號進(jìn)行截?cái)嗵幚恚崛〕鲇行盘柖?提取過程如下:從信號段第m1個點(diǎn)數(shù)作為起點(diǎn),從信號段第(m2+q×n)個點(diǎn)數(shù)作為終點(diǎn),起點(diǎn)至終點(diǎn)的這段信號段就是有效信號段,有效信號段長度num=m2+q×n-m1+1,如圖1所示.
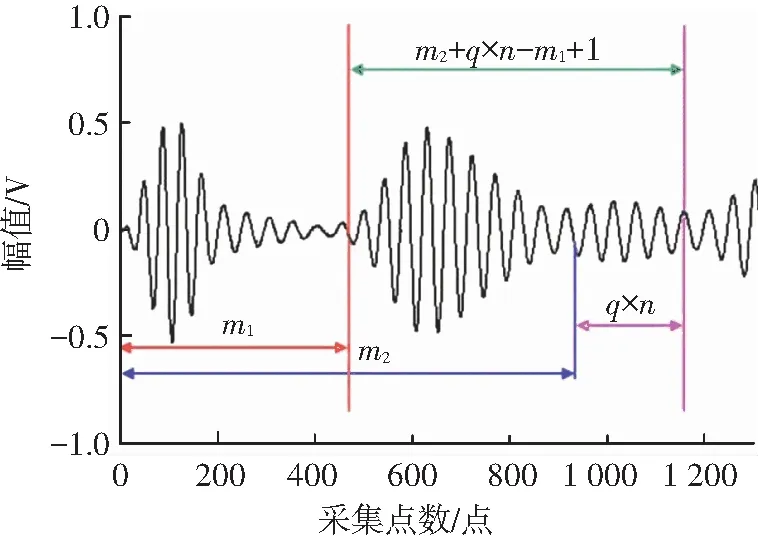
圖1 有效信號段的提取
2 損傷指標(biāo)
由于Lamb波信號經(jīng)過結(jié)構(gòu)損傷時發(fā)生散射和能量衰減,信號幅值會發(fā)生明顯的改變,通過比較結(jié)構(gòu)在發(fā)生損傷前后的Lamb波信號,就能確定幅值的變化量,進(jìn)而判斷出結(jié)構(gòu)中是否存在損傷[11-12].另一種處理方法則是對Lamb波信號進(jìn)行時頻分析,把時域內(nèi)的Lamb波信號轉(zhuǎn)換為頻域或者時頻域內(nèi)的特征進(jìn)行分析,提取出的幅值變化量就作為損傷因子[13-14].本文利用損傷發(fā)生前后的信號幅值的相關(guān)系數(shù)作為損傷的判斷依據(jù)來判斷損識別傷和損傷成像.
某條路徑采集到的損傷前后的信號段經(jīng)截?cái)嗵幚砗蠓謩e用a和b表示,ρ表示信號a和b的相關(guān)系數(shù),對于離散信號,ρ可表示為

(1)
因此DI的數(shù)值越大,則該路徑損傷前后的信號相關(guān)性越小,損傷位置范圍就越大.
3 損傷成像算法
在RAPID成像算法基礎(chǔ)上,引進(jìn)圖像增強(qiáng)因子以提高損傷區(qū)域與無損傷區(qū)域的對比度.然后根據(jù)每個激勵-接收路徑的損傷指標(biāo),計(jì)算整個結(jié)構(gòu)內(nèi)每個像素點(diǎn)存在損傷的概率疊加.
(2)
式中:下標(biāo)ai為激勵壓電傳感器;下標(biāo)si為接收壓電傳感器.

圖2 激勵-接收路徑示意
當(dāng)激勵-接收路徑距離損傷較近時,該路徑計(jì)算得出的損傷指標(biāo)DI就會較大,距離越遠(yuǎn)的則越小.由于環(huán)境的影響,在不存在損傷的路徑上,損傷發(fā)生前后采集到的信號也存在較小差異,使得DI較小,而靠近損傷的路徑的DI則會很大.算法以DI的最大值的0.2倍為閾值,低于閾值的認(rèn)為該路徑距離損傷較遠(yuǎn),將該路徑的DI置為0.用這種方法對先前計(jì)算的DI進(jìn)行修正,然后將修正后的DI用于損傷成像算法的計(jì)算.
4 實(shí)驗(yàn)驗(yàn)證
4.1 實(shí)驗(yàn)布置
基于Lamb波的結(jié)構(gòu)健康監(jiān)測方法可以應(yīng)用于大型金屬板狀結(jié)構(gòu)范圍廣、距離長的損傷監(jiān)測[15-16].根據(jù)結(jié)構(gòu)的大小,可以布置M行N列的傳感器陣列,將較大的檢測區(qū)域分割成若干子區(qū)域.一個子區(qū)域就是一個基本檢測單元,在基本檢測單元內(nèi)對損傷進(jìn)行檢測和識別.在本文的研究中,以2行3列共6個壓電傳感器組成的區(qū)域作為一個獨(dú)立的基本檢測單元.
實(shí)驗(yàn)采用無錫海鷹企業(yè)集團(tuán)有限責(zé)任公司的P51型壓電傳感器,壓電傳感器直徑為10mm,厚度為2mm,實(shí)驗(yàn)件為1 000mm×1 000mm×5mm的金屬鋁板.在鋁板上粘貼第1個壓電傳感器,編號為1,粘貼位置定為坐標(biāo)原點(diǎn)(0,0).在平板上共布置9個壓電傳感器(編號1~9),組成3×3的正方形陣列.相鄰兩個壓電傳感器之間水平、垂直距離均為150mm.傳感器陣列距離右邊邊界200mm,距離上方和下方邊界均為350mm,距離左邊邊界500mm,如圖3所示.編號為1、2、3、4、5、6的壓電傳感器組成的長方形區(qū)域作為第1個基本檢測單元,編號為4、5、6、7、8、9的壓電傳感器組成的長方形區(qū)域作為第2個基本檢測單元.
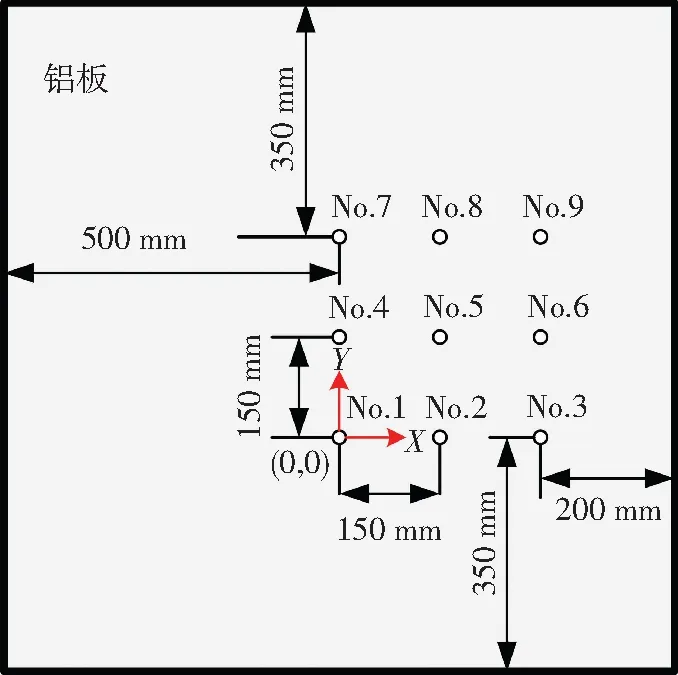
圖3 壓電傳感器的布置
實(shí)驗(yàn)布置如圖4所示,激勵信號采用中心頻率為250kHz的調(diào)制五波峰窄帶波,激勵信號由NIPXI5441任意波形發(fā)生器產(chǎn)生,經(jīng)過KH7602M寬帶型功率放大器放大,進(jìn)而激勵壓電傳感器產(chǎn)生Lamb波.NITB2605 多路復(fù)合接線盒作為一個自動切換通道的開關(guān),自動選擇每個壓電傳感器作為激勵.響應(yīng)信號通過NIPXI5105數(shù)據(jù)采集卡由其他壓電傳感器接收.NIPXI-1042Ω機(jī)箱集合了NIPXI5441任意波形發(fā)生器、NITB2605 多路復(fù)合接線盒和NIPXI5105數(shù)據(jù)采集卡.采樣頻率設(shè)置為10MHz.中心頻率為250kHz時的Lamb波的A0波群速度3 083m/s,S0波的群速度為4 745m/s.

圖4 實(shí)驗(yàn)布置
信號采集流程如下:對1號壓電傳感器進(jìn)行激勵,2~6號壓電傳感器接收信號;激勵2號壓電傳感器,3~6號壓電傳感器接收信號;信號的激勵、采集只在一個單元內(nèi)進(jìn)行.共采集2個單元內(nèi)的信號.
按照先前提出的有效信號段自提取算法對信號進(jìn)行處理,將提取出的有效信號段應(yīng)用于損傷成像算法.損傷成像算法中的控制激勵-接收路徑影響范圍的尺度因子參數(shù)β取1.02;圖像增強(qiáng)因子α取10.放大倍數(shù)q取1.2,采用吸波膠模擬結(jié)構(gòu)損傷.
圖5給出了路徑1-4采集到的原始信號和提取出的有效信號.1號傳感器激勵時,4號傳感器接收到S0波和A0波所需的時間分別為31.6、48.6μs,時間轉(zhuǎn)換為相應(yīng)的采集點(diǎn)數(shù)分別為316、486個點(diǎn).此時,剛采集到A0波為第486個點(diǎn),補(bǔ)償?shù)狞c(diǎn)數(shù)為250.0×1.2,等于300個點(diǎn),即信號段的末尾為第786個點(diǎn).因此提取出的路徑1-4有效信號段的起始點(diǎn)為第316個點(diǎn),結(jié)束點(diǎn)為第786個點(diǎn).如圖5所示,圖5中方框所圍的信號部分就是提取出的有效信號.根據(jù)同樣的方法提取出的路徑1-5有效信號段的起始點(diǎn)為第447個點(diǎn),結(jié)束點(diǎn)為第988個點(diǎn).提取出的路徑1-6有效信號段的起始點(diǎn)為第707個點(diǎn),結(jié)束點(diǎn)為第1 388個點(diǎn).

圖5 路徑1-4采集到的原始信號和提取出的有效信號
4.2 雙損傷識別
以4-9號傳感器組成的基本檢測單元為例分析對比實(shí)驗(yàn)中信號段長度的確定方法.
4號傳感器激勵時,7號傳感器接收到S0波和A0波所需的時間分別為31.6、48.6μs,時間轉(zhuǎn)換為相應(yīng)的采集點(diǎn)數(shù)分別為316、486個點(diǎn).以4號與7號傳感器之間的距離來確定第1段參與計(jì)算的信號段長度.此時,剛采集到A0波為第486個點(diǎn),補(bǔ)償?shù)狞c(diǎn)數(shù)為250.0×1.2,等于300個點(diǎn),即信號段的末尾為第786個點(diǎn),實(shí)際參與計(jì)算取第800個點(diǎn).因此,該段信號段確定如下:第301個點(diǎn)為起始點(diǎn),第800個點(diǎn)為結(jié)束點(diǎn),信號段長度為500個點(diǎn).
4號傳感器激勵時,8號傳感器接收到S0波和A0波的相應(yīng)點(diǎn)數(shù)為第447個點(diǎn)、第688個點(diǎn).考慮到4號傳感器與7號傳感器之間的距離,不能遺漏掉該段距離有效的信號段,因此該段信號段確定如下:第301個點(diǎn)為起始點(diǎn),第1 000個點(diǎn)為結(jié)束點(diǎn),信號段長度為700個點(diǎn).
4號傳感器激勵時,9號傳感器接收到S0波和A0波的相應(yīng)點(diǎn)數(shù)為第707個點(diǎn)、第1 088個點(diǎn).該段信號段確定如下:第301個點(diǎn)為起始點(diǎn),第1 400個點(diǎn)為結(jié)束點(diǎn),信號段長度為1 100個點(diǎn).
同時,為了考察無關(guān)信號的長度對損傷成像的影響,選取了第301個點(diǎn)為起始點(diǎn),信號段長度分別為1 400、2 200、2 700個點(diǎn)的信號段參與損傷成像.
在鋁板上粘貼兩個模擬損傷.損傷點(diǎn)位置如圖6所示.一處模擬損傷位于主要路徑1-6、2-4的直接路徑上,次要路徑1-5的間接路徑上;另一處模擬損傷位于主要路徑4-9、6-8的直接路徑上.
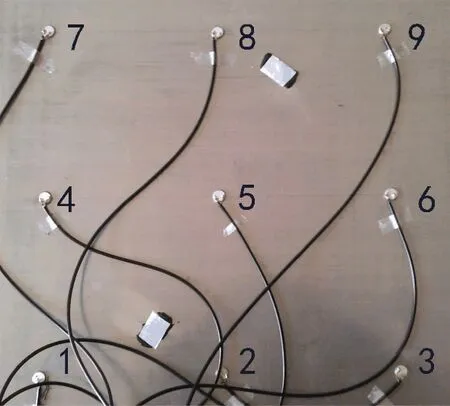
圖6 雙損傷位置
4.2.1 等長度信號段應(yīng)用于雙損傷識別
現(xiàn)采用等長度信號段計(jì)算信號相關(guān)系數(shù)的方法來識別損傷.
將長度分別為500個點(diǎn)(第301個點(diǎn)為起始點(diǎn),第800個點(diǎn)為結(jié)束點(diǎn))、700個點(diǎn)(第301個點(diǎn)為起始點(diǎn),第1 000個點(diǎn)為結(jié)束點(diǎn))、1 100個點(diǎn)(第301個點(diǎn)為起始點(diǎn),第1 400個點(diǎn)為結(jié)束點(diǎn))的信號段參與雙損傷成像比較.
如圖7(a)所示,當(dāng)信號段長度為500個點(diǎn)時,主要路徑1-6、4-9的DI較大,主要路徑2-4,6-8的DI次之,無損傷的路徑3-4的DI大致等于主要路徑2-4的DI.如圖7(b)所示,當(dāng)信號段長度為700個點(diǎn)時,主要路徑2-4、6-8的DI略微增長,主要路徑1-6的DI減小,路徑3-4、主要路徑4-9的DI減小明顯.如圖7(c)所示,當(dāng)信號段長度增加到1 100個點(diǎn)時,隨著路徑4-9的有效信號段長度增加,DI增大明顯,路徑1-6、2-4都有不同程度的增大.
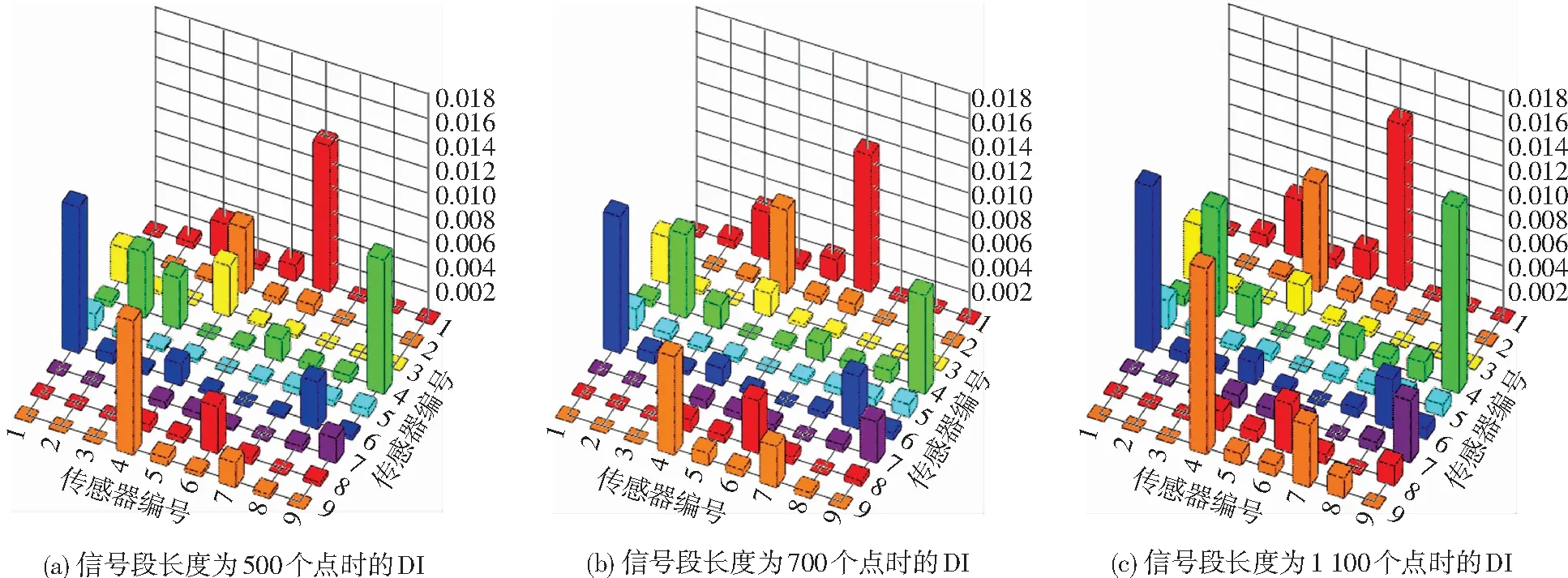
圖7 信號段長度分別為500、700、1 100個點(diǎn)時的DI
如圖8(a)所示,因?yàn)闊o損傷的路徑3-4的DI大致等于主要路徑2-4的DI,所以最終成像結(jié)果中出現(xiàn)路徑1-6與路徑3-4的虛假損傷,并且成像結(jié)果較暗淡,不清晰.當(dāng)信號段包含的有效信號長度增加時,損傷所在的主要路徑的DI總體都有所增加,損傷位置識別的比先前更明顯,消除了虛假損傷,但還是有一個損傷不太明顯.
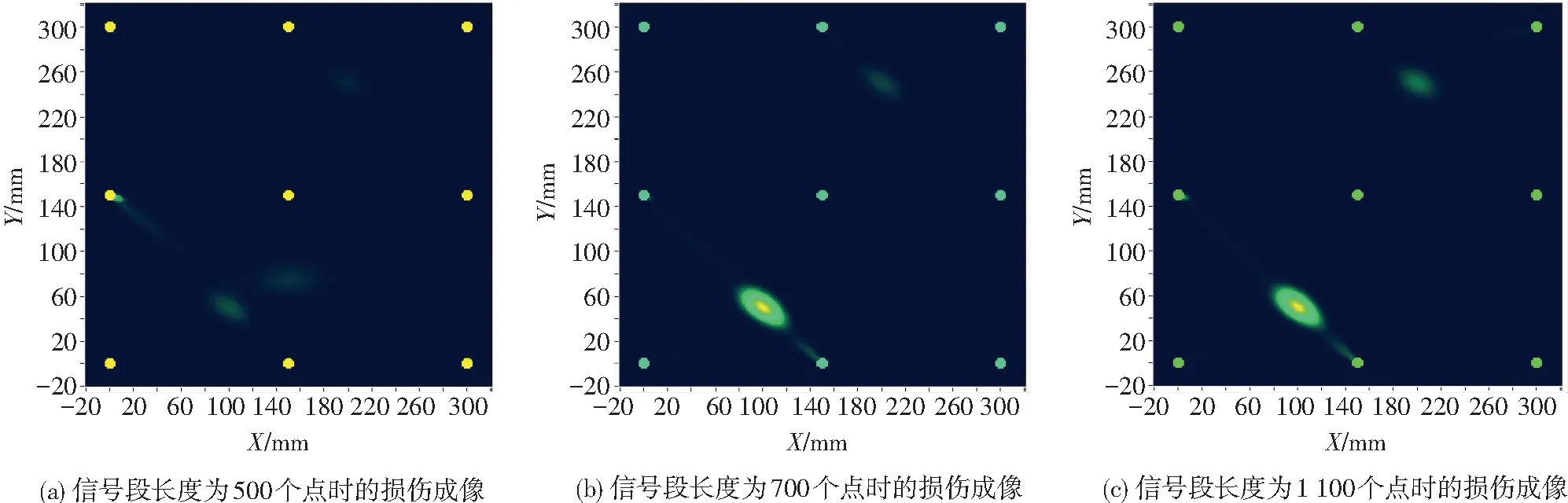
圖8 信號段長度分別為500、700、1 100個點(diǎn)時的損傷成像
因此,有效信號段的長度太小時可能會導(dǎo)致成像圖中出現(xiàn)實(shí)際不存在的損傷,且有的損傷不明顯,不易觀察到.隨著有效信號段長度的增加,成像效果會隨之改善,但仍有可能出現(xiàn)損傷成像不明顯的現(xiàn)象.這是因?yàn)樾盘柖伍L度的增加,會不同程度地影響各個DI,進(jìn)而影響成像結(jié)果.
將長度分別為1 400個點(diǎn)(第301個點(diǎn)為起始點(diǎn),第1 700個點(diǎn)為結(jié)束點(diǎn))、2 200個點(diǎn)(第301個點(diǎn)為起始點(diǎn),第2 500個點(diǎn)為結(jié)束點(diǎn))、2 700個點(diǎn)(第301個點(diǎn)為起始點(diǎn),第3 000個點(diǎn)為結(jié)束點(diǎn))的信號段參與雙損傷成像比較.
如圖9所示,隨著信號段長度逐漸增加,信號段中無關(guān)信號段長度也隨之增加,主要路徑上1-6和路徑4-9的DI都有所增加.
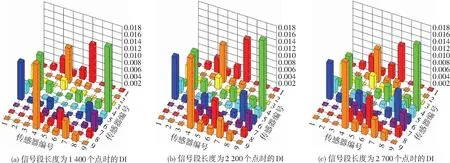
圖9 信號段長度分別為1 400、2 200、2 700個點(diǎn)時的DI
如圖10所示,損傷明亮程度隨著信號段長度的增加先增強(qiáng),后減弱,成像結(jié)果先由壞轉(zhuǎn)好,再由好轉(zhuǎn)壞,這是因?yàn)闊o關(guān)信號段的長度增加影響了DI,最終影響了成像效果.

圖10 信號段長度分別為1 400、2 200、2 700個點(diǎn)時的損傷成像
因此,適當(dāng)?shù)脑黾訜o關(guān)信號段的長度會改善成像效果,但若是增加太多的無關(guān)信號,會導(dǎo)致成像中的個別損傷暗淡,效果不明顯.
4.2.2 自提取有效信號段應(yīng)用于雙損傷識別
現(xiàn)采用有效信號段自提取算法計(jì)算信號相關(guān)系數(shù)的方法來識別損傷.
利用有效信號段自提取算法提取出的路徑1-4有效信號段的起始點(diǎn)為第316個點(diǎn),結(jié)束點(diǎn)為第786個點(diǎn).提取出的路徑1-5有效信號段的起始點(diǎn)為第447個點(diǎn),結(jié)束點(diǎn)為第988個點(diǎn).提取出的路徑1-6有效信號段的起始點(diǎn)為第707個點(diǎn),結(jié)束點(diǎn)為第1 388個點(diǎn).在不同激勵-接收路徑采用不同長度的有效信號段計(jì)算信號相關(guān)系數(shù),并得到損傷指標(biāo).
觀察圖11,主要路徑1-6、4-9的DI最大,主要路徑2-4、6-8的DI次之,次要路徑1-3的DI與主要路徑6-8的DI差不多,無關(guān)路徑的DI普遍較小,充分利用了有效信號段增大DI的優(yōu)勢,剔除了無關(guān)信號段對DI的不利影響.
如圖12所示,應(yīng)用自提取有效信號段參與損傷識別的成像圖對損傷的識別效果較好,不需要人工選擇信號段的長度,既可避免出現(xiàn)虛假損傷,又能避免出現(xiàn)另一損傷隱約可見的不理想效果,可以不受干擾、自動地識別出損傷,并清晰地顯示出來.
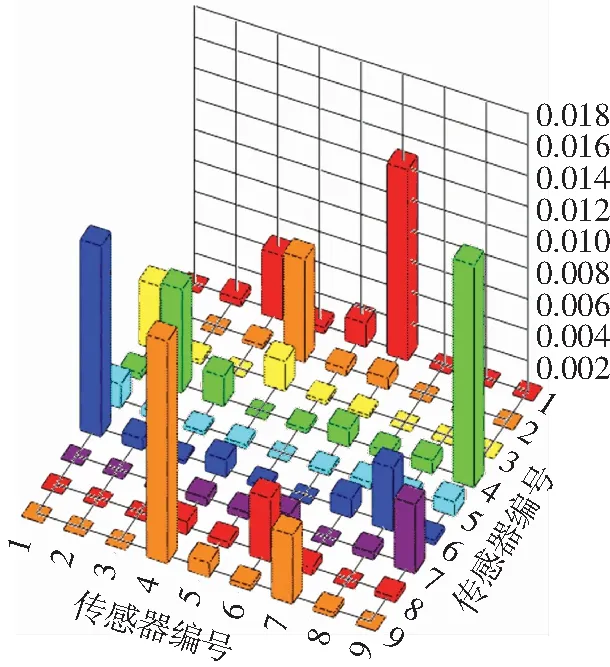
圖11 雙損傷時的損傷指標(biāo)柱狀
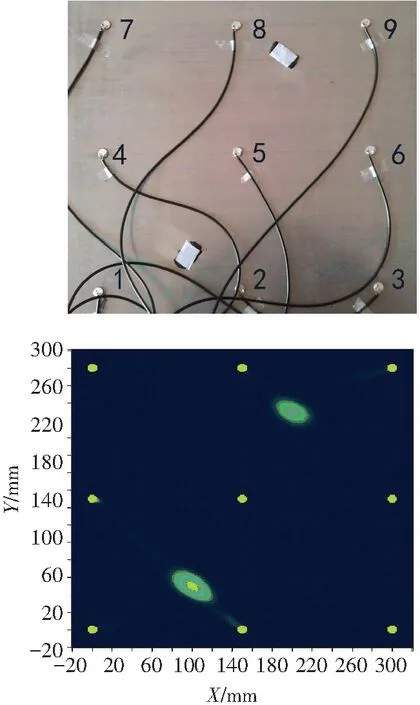
圖12 雙損傷成像圖與實(shí)際損傷圖對比
5 結(jié) 論
1)提出了一種有效信號段自提取的算法,并結(jié)合區(qū)域分割方法,改進(jìn)了成像算法,增強(qiáng)了成像效果,使得不會出現(xiàn)虛假損傷和遺漏真實(shí)損傷的現(xiàn)象,不再需要人為地選擇參與計(jì)算的信號段長度,避免了人工操作對損傷識別結(jié)果帶來的不利影響.
2)能依據(jù)基本檢測單元內(nèi)的6個傳感器組成的檢測網(wǎng)絡(luò)準(zhǔn)確識別出每個單元內(nèi)的單個損傷,并利用損傷成像算法將分布在不同基本檢測單元內(nèi)的多個損傷位置成像出來,直觀明了地顯示出多個損傷的位置.
[1] 馮勇明,周麗,李真.基于匹配追蹤的蜂窩夾層復(fù)合材料損傷檢測[J].儀器儀表學(xué)報,2012,33(4):836-843.DOI: 10.3969/j.issn.0254-3087.2012.04.018. FENG Yongming, ZHOU Li, LI Zhen. Research on honeycomb sandwich composite structure damage detection based on matching pursuit method[J]. Chinese Journal of Scientific Instrument,2012,33(4):836-843.DOI: 10.3969/j.issn.0254-3087.2012.04.018.
[2] ZHOU L, YUAN F G, MENG W J.A pre-stack migration method for damage identification in composite structures[J]. Smart Structures and Systems, 2007, 3(4): 439-454. DOI : 10.12989/sss.2007.3.4.439.
[3] MIAO Xiaoting, WANG Dong, YE Lin, et al. Identification of dual notches based on time-reversal Lamb waves and a damage diagnostic imaging algorithm[J]. Journal of intelligent material system and structures, 2011,22(17): 1983-1992.
[4] MALINOWSKI P, WANDOWSKI T,TRENDAFILOVA I, et al. A phased array-based method for damage detection and localization in thin plates[J].Structural Health Monitoring,2008,8(1):5-11. DOI: 10.1177/1475921708090569.
[5] JEONG H, JANG Y S. Wavelet analysis of plate wave propagation in composite laminates[J].Composite Structures,2000,49(4):443-450.DOI: 10.1016/S0263-8223(00)00079-9.
[6] JEONG H, JANG Y S. Fracture source location in thin plates using the wavelet transform of dispersive waves[J]. IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control, 2000, 47(3): 612-619. DOI: 10.1109/58.842048.
[7] HUANG N E, SHEN Zheng, LONGS R, et al. The empirical mode decomposition and Hilbert spectrum for nonlinear and non stationary time series analysis[J]. Proceedings of the Royal Society of London, Series A, 1998,454(1971):903-995. DOI: 10.1098/rspa.1998.0193.
[8] HUANG N E, SHEN Zheng, LONG S R. A new view of nonlinear water waves: the Hilbert spectrum[J]. Annual Review of Fluid Mechanics, 1999, 31(1):417-457. DOI: 10.1146/annurev.fluid.31.1.417.
[9] HAY T R, ROYER R L, GAO Huidong, et al. A comparison of embedded sensor Lamb wave ultrasonic tomography approaches for material loss detection[J].Smart Material and Structures,2006,15(4):946-951. DOI:10.1088/0964-1726/15/4/007.
[10]WANG Dong, YE Lin, LU Ye. A probabilistic diagnostic algorithm for identification of multiple notches using digital damage fingerprints (DDFs)[J]. Journal of Intelligent Material Systems and Structures, 2009, 20(12):1439-1450. DOI: 10.1177/1045389X09338323.
[11]ROSALIE S C, VAUGHAN M, BREMNER A, et al. Variation in the group velocity of Lamb waves as a tool for the detection of delamination in GLARE aluminium plate-like structures[J]. Composite Structures, 2004, 66(1/2/3/4):77-86.DOI: 10.1016/j.compstruct.2004.04.024.
[12]GRONDEL S, ASSAAD J, DELEBARRE C, et al. Health monitoring of a composite wingbox structure[J]. Ultrasonics, 2004, 42(1/2/3/4/5/6/7/8/9):819-824.DOI: 10.1016/j.ultras.2004.01.058.
[13]BIEMANS C, STASZEWSKI W J, BOLLER C, et al. Crack detection in metallic structures using broadband excitation of acousto-ultrasonics[J]. Journal of Intelligent Material Systems and Structures, 2001, 12(8):589-597.DOI: DOI: 10.1177/10453890122145366.
[14]IHN J B, CHANG F K. Detection and monitoring of hidden fatigue crack growth using a built-in piezoelectric sensor/actuator network: I. diagnostics[J]. Smart Materials and Structures, 2004, 13(3):621-630. DOI: 10.1088/0964-1726/13/3/021.
[15]何志全,周麗,孫虎.基于傳遞阻抗能量的無基準(zhǔn)Lamb波裂紋檢測[J].工程力學(xué),2014,31(7):250-256. DOI: 10.6052/j.issn.1000-4750.2013.01.0113. HE Zhiquan, ZHOU Li, SUN Hu. Reference-free Lamb wave crack detection based on transfer impedance energy[J]. Engineering Mechanics,2014,31(7):250-256. DOI: 10.6052/j.issn.1000-4750.2013.01.0113.
[16]鄭陽,周進(jìn)節(jié).蘭姆波在裂紋處的模態(tài)轉(zhuǎn)換及散射特性研究[J].工程力學(xué),2014,31(6):21-29. DOI: 10.6052/j.issn.1000-4750.2012.12.0982. ZHENG Yang, ZHOU Jinjie. Mode conversion and scattering properties of Lamb waves near localized cracking[J]. Engineering Mechanics, 2014, 31(6): 21-29. DOI: 10.6052/j.issn.1000-4750.2012.12.0982.
(編輯 張 紅)
Identification of structural multiple damage locations using an effective signal automatic extraction algorithm
OUYANG Qinghua, ZHOU Li, LIU Xiaotong
(State Key Laboratory of Mechanics and Control of Mechanical Structures (Nanjing University of Aeronautics & Astronautics), Nanjing 210016, China)
To identify multiple damage locations in the structure, a method of multiple damage locations identification and imaging was proposed. In this method, the damage index is calculated by using an effective Lamb wave response automatic extraction algorithm. The detected key area in the structure is divided into several subregions, and the effective response signals containing the structural damage information are automatically extracted from the entire Lamb wave responses received by the piezoelectric sensors. Subsequently, the damage indexes of every subregion based on the correlation coefficient are evaluated by using the effective Lamb wave response automatic extraction algorithm. Eventually, the damage locations identification and imaging are performed using the reconstruction algorithm for probabilistic inspection of damage (RAPID). The experimental verification research is conducted using an aeronautic aluminum plate. The experimental results show that the method proposed in this research is capable of identifying multiple damage locations quickly and effectively, as well as imaging the damages in detected area clearly.
structural health monitoring; piezoelectric sensor; Lamb wave; correlation coefficient; multiple damage identification; damage imaging
10.11918/j.issn.0367-6234.201509047
2015-09-12
國家自然科學(xué)基金(11172128,51475228);高等學(xué)校博士學(xué)科點(diǎn)專項(xiàng)科研基金(20123218110001);機(jī)械結(jié)構(gòu)力學(xué)及控制國家重點(diǎn)實(shí)驗(yàn)室(南京航空航天大學(xué))自主研究課題資助(0515G01)
歐陽青華(1990—),男,碩士研究生; 周 麗(1963—),女,教授,博士生導(dǎo)師
周 麗,lzhou@nuaa.edu.cn
TP212.13
A
0367-6234(2017)04-0035-07
猜你喜歡
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
哲學(xué)評論(2021年2期)2021-08-22 01:53:34
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中華詩詞(2019年7期)2019-11-25 01:43:04
電子制作(2018年11期)2018-08-04 03:25:42
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
