基于Canny算子的軌道板傷損自動識別方法
2017-04-12 05:14:50朱有桃上海鐵路局科研所
上海鐵道增刊 2017年4期
關鍵詞:檢測
朱有桃 上海鐵路局科研所
在電氣化的高速鐵路軌道鋪設中,通常采用CRTS即無砟軌道板,其主要分為CRTSⅠ型、CRTSⅡ型和CRTSⅢ型無砟軌道板。軌道板承載著鋼軌和扣件,在受到氣溫、震動、外力等因素的作用下會產生裂紋或缺損,這將直接影響鋼軌承載列車行駛的安全性,因此軌道板傷損在鐵路部門日常維護中作為重點檢查內容之一。
傳統軌道板檢測是通過人工線路巡視,或者對軌道板高清成像,由人工對每幅圖片進行篩選的方式,對軌道板的狀態進行檢測。這些方式投入的人力成本大、效率低;主觀因素較大,容易發生漏檢、誤檢,不能滿足高鐵維修的需求。因此急需先進的智能識別技術對軌道板缺陷進行自動檢測,以提高檢測質量和效率。
1 總體設計
由CCD高清線陣相機和定制高亮LED光源形成的“GDXJ-1型車載智能軌道巡檢系統”,安裝在鋼軌探傷車上,采集軌道面的高清圖像。軌道板傷損自動識別算法設計過程為,先對采集的高清圖像進行預處理,然后利用投影法對各軌道板進行分割,同時對扣件區域進行分割去除,再運用Canny算子對軌道板傷損進行邊緣檢測,并對內邊緣線進行判別,對疑似傷損進行分類存儲。后續可依靠人工,對疑似缺陷進行進一步確認。
2 圖像分割
圖像分割是分析圖像的重要步驟之一,它是將圖細分成為解決問題服務的多個子區域或對象,各子區域或對象一般用于定位圖中有用的點、邊界、線等。分析軌道板圖像時我們需將軌道板從整體圖中分割出來,而且要去除扣件區域,便于后續邊緣提取。現有的圖像分割方法主要分為:基于閾值、基于區域、基于邊緣和基于特定理論的分割方法。在此應用基于灰度值的不連續性和相似性,相似性就是以灰度突變(極大值或極小值)為基礎分割,通常出現在邊緣;相似性就是將一幅圖分割為相似的區域。基于灰度值的分割方法是通過投影法實現的。
投影可以明顯而且有效地提取圖像的特征,這種方法本質是一種統計方法,它根據圖像在某一方向的投影特性進行分析。水平投影即對圖像數組進行行求和,統計圖像水平方向像素的和;垂直投影即對圖像數組進行列求和,統計圖像垂直方向像素的和。一幅二維圖像可以轉化成兩個正交的一維投影函數。投影法通過降低維數,減小計算量,以達到更有效、更便捷地分析圖像特征,因此是一種十分重要的方法。投影函數最常用的是積分投影函數,可分為垂直和水平積分投影。
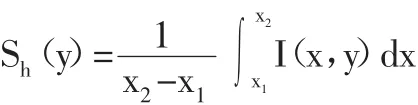
垂直(水平)積分投影是將同一列(行)每個部分各點像素灰度值進行累加,反映在坐標系中個各個數值點,從而可以得到在垂直(水平)方向上的圖像灰度分布變化情況。令I(x,y)表示數字圖像在點(x,y)處的像素灰度值,區間[x1,x2]內的水平積分投影函數Sh(y)為:
在區間[y1,y2]內垂直積分投影函數Sv(x)和分別為:

在灰度較為均勻的圖像中,積分投影將數字圖像的二維信息轉化為橫、縱坐標中的一維曲線。因此,可分析一維曲線中具有明顯區分特征處,找到所需信息。在此,對輸入軌道板圖像進行垂直(水平)投影,因軌道板具有固定的位置,在連接處的像素灰度值會發生較大變化,在區域內會有極小值,因此可根據灰度變化曲線對其進行分割。扣件區域運用相同的方法,進行分割,并去除該部分,為后續邊緣檢測減少干擾。
3 邊緣檢測
邊緣檢是將數字圖像中灰度變化較大的點標記出,保留有用信息,并且去除無用或不相關信息。它可以大幅減少數據量,在描繪出目標物體的同時,蘊含豐富的信息,對識別分析圖像特征具有重要作用。邊緣檢測方法為:查找一階導數極值的方法和二階導數過零點的方法。基于查找的方法是搜索圖像一階導數中的最大和最小值來確定檢測邊界,一般邊界出現在梯度最大的方向。基于過零點的方法是尋找圖像二階導數超過零點來確定邊界,通常是拉普拉斯算子模板過零點。
通過圖像亮度的一階導數可以在圖像的亮度梯度中搜索峰值,該一階導數可由帶有掩碼的原始數據卷積計算得到。如果I(x)表示x點的亮度,I'(x)表示x點的亮度梯度,則:

基于亮度的二階導數是亮度梯度(亮度一階導數)的變化率。二階導數中的過零點可得到梯度中的局部最大值,當圖像操作使用一個合適的尺度表示,二階導數中的峰值檢測是邊線檢測。圖像經處理后可以在邊線的一邊看到兩個相反的梯度,也就可以在亮度梯度上看到非常大的變化。因此,可以在圖像亮度梯度的二階導數中尋找過零點。
如果I(x)表示點x的亮度,I”(x)表示點x亮度的二階導數,則:

本算法使用canny算子進行邊緣檢測。
Canny算子邊緣檢測是高斯函數的一階導數,是對信噪比與定位之乘積的最優化逼近算子。對圖像進行邊緣檢測需能在抑制噪聲的前提下精確確定邊緣。受到噪聲影響的階躍型邊緣在Canny邊緣檢測算子應用最好,應具有以下三個標準:
(1)無邊緣丟失和無虛假邊緣(檢測標準);
(2)單個邊緣響應代替多個響應(單響應標準);
(3)檢測邊緣最接近實際邊緣中心(定位標準)。
Canny邊緣檢測算法:
首先,運用高斯濾波去除圖象噪聲。噪聲很容易被識別成偽邊緣,可選取下式高斯平滑函數,適當選取高斯模糊半徑,過大或過小容易漏檢弱邊緣。

G(x,y)為平滑后的圖像。
然后,用一階差分卷積來計算梯度的幅值和方向。2×2的robert算子為 H1和 H2,f(m,n)為原始圖像,分別作卷積后,求出幅值φ和方向θφ

再次,利用梯度方向抑制梯度幅值的非極大值。
梯度邊緣通常很粗且亮,一般不是一個像素寬,這樣的圖還不算清晰,因此需用梯度方向對梯度幅值的非極大值進行抑制(NMS),保留局部最大梯度,也就是說保留梯度中變化最銳利的部分。這樣得到的邊緣清晰,易于區分。
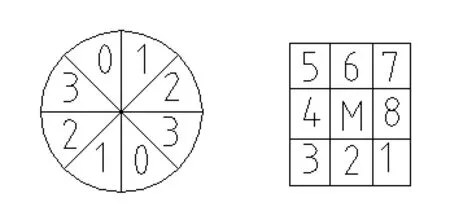
圖1 像素點的鄰域
圖1中,將圖像像素點標記為0到3的四個扇區,對應3×3鄰域四種組合。在每一點鄰域的中心像素M與沿著梯度線的兩個像素相比。如果M的梯度值小于或等于沿梯度線的兩個相鄰像素梯度值,則可令M=0。
即:N[i,j]=NMS(M[i,j],ξ[i,j])
最后,用雙閾值算法檢測和連接邊緣。
一般的邊緣檢測算法用一個閥值來對小于其的梯度值進行濾除,保留大的梯度值。第三步中已經去掉了大量偽邊緣,在經由強閾值確定了真邊緣后,再利用弱閾值對真邊緣進行連接處理,以保證邊緣的順滑真實。Canny算法應用一個高和一個低閥值來區分邊緣。小于低閥值的點則被抑制掉。如果邊緣梯度值小于高閥值,大于低閥值,則標記為弱邊緣點。如果邊緣像素點梯度值大于高閥值,則被認為是強邊緣點。
雙閾值算法具體為:對非極大值抑制圖像選高低兩個閾值 τ1和 τ2,(2τ1≈τ2)。由高閾值得到邊緣圖像 N2[i,j],邊緣有斷點,且含有較少假邊緣。該算法通過搜索到N2[i,j]中輪廓,當到達輪廓的端點時,在由低閾值得到邊緣圖像N1[i,j]的8鄰點位置尋找可以連接到輪廓上的邊緣,如此不斷地在N1[i,j]中收集邊緣,直到將N2[i,j]連接起來為止。
4 實驗結果
圖像由軌道巡檢系統采集,均為2048×2048的灰度圖像,各圖中均對應線路名稱和公里標。算法具體運用過程如下:
(1)先建立用于存放疑似軌道板傷損圖片的文件夾。然后對輸入圖像進行平滑預處理,消除圖像中無用信息,確保其灰度均衡。
(2)通過水平投影,分割出軌道圖片中的軌道板圖。由圖2可看出,道板圖相對固定,在曲線圖中反映的灰度和值會發生急劇變化,通常取得極小值,可通過搜索極小值點的位置對原始圖片進行切分,即實現對軌道板進行準確分割。

圖2 軌道板水平投影分割圖
(3)對分割后的軌道板圖,再進行橫向和縱向投影,剪切出扣件所在區域的軌道板子圖。因扣件區域反映的是扣件的具體情況,將扣件區域分割出并去除,有利于減少后續邊緣檢測的干擾。扣件區域的水平和垂直投影圖分別如圖3所示,在扣件區域邊緣處,像素和值同樣會出現極小值,因此,尋找區域極小值可準確切分扣件區域。
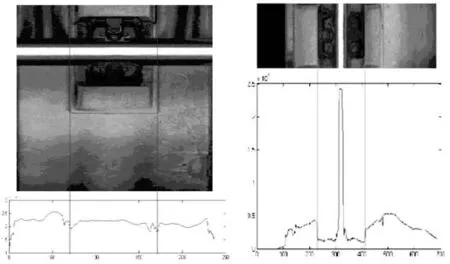
圖3 扣件水平和垂直投影
(4)將每幅圖像中軌道板圖減去其扣件區域圖,這樣可對其除扣件區域的其他區域圖像進行檢測。效果圖如圖4左部分所示。
(5)對剪切出的軌道板圖運用Canny算子進行邊緣檢測,若發現此軌道板內邊緣線明顯則存在問題。采用雙閾值算法檢測和連接邊緣,減少了假邊緣段數量,如圖4所示,黑色圖為處理后圖像,可見邊緣檢測后的白色線邊緣較少,中圖中間區域存在細紋邊緣線,即可判斷軌道板出現傷損,而右圖中出現較少則可判斷該軌道板正常。

圖4 軌道板邊緣檢測圖
(6)對這些邊緣進行缺陷分類分析,確定其是否屬于軌道板裂紋、缺損或有異物。根據先前建立的文件夾,將軌道板傷損圖像分類放在不同文件夾中。
通過對10組,每組10000幅,不同線路的圖形進行自動識別,平均每組圖像平均用時400s,每組平均篩選出2000幅疑似傷損圖,效率提高約80%,較大的減輕了圖像分析人員的工作量。同時通過人工對10組10000幅圖進行每幅查看,人工結果和自動識別算法處理結果對比發現,自動處理結果中包含99%傷損,存在一定可接受范圍內的多報。實驗表明該軌道板傷損自動識別方法,可提高數據分析人員的處理效率,滿足數據處理結果要求。
5 結束語
本文給出了軌道板傷損自動識別的軟件算法,并成功用于日常軌道巡檢系統采集數據的分析工作中。通過對采集的圖像進行預處理,利用像素灰度的水平和垂直投影對軌道板和扣件區域進行分割,并將扣件區域去除,運用Canny算子對圖像進行邊緣檢測,根據內線邊緣判別軌道板疑似傷損,將挑選出的圖像進行分類存儲,最后由人工進行確認。在邊緣檢測中,利用梯度方向抑制梯度幅值的非極大值;用高、低雙閾值算法減少偽邊緣段數量并連接邊緣。該系統的應用,改變了傳統人工低效的查看每一張軌道圖片的模式,較大的減少了軌道圖像數據分析人員的工作量,提高了軌道板檢測和維護的工作效率,對保障鐵路運輸安全具有十分積極和重要的作用。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48