天空散射光偏振成像噪聲建模與分析*
2017-04-12 11:04:10趙開春黃考利
傳感器與微系統 2017年4期
關鍵詞:測量
盧 皓, 趙開春, 尤 政, 黃考利
(1.清華大學 精密儀器系,北京 100084; 2.軍械工程學院,河北 石家莊 050003)
天空散射光偏振成像噪聲建模與分析*
盧 皓1,2, 趙開春1, 尤 政1, 黃考利2
(1.清華大學 精密儀器系,北京 100084; 2.軍械工程學院,河北 石家莊 050003)
仿生偏振導航是近年來興起的一種新原理導航方式,對天空光進行成像可以獲得更為豐富的天空散射光的偏振信息以及分布特征,有利于提高偏振導航傳感器的精度和抗干擾能力。根據現有的Stokes參量測量偏振光的原理以及成像裝置的噪聲模型,對基于Stokes參量法的偏振角度測量噪聲進行了建模,并根據模型進行了仿真分析。仿真結果表明:提高相機的信噪比(SNR)能夠顯著提高偏振成像的質量,當相機的SNR大于44 dB時,天空偏振角度的測量標準差將優于1°/像素;得到了0°,60°,120°和0°,45°,90°檢偏器分布模式下對不同偏振角度的入射光測量噪聲的統計分布特征。盡管0°,60°,120°的檢偏器布置方案相對于0°,45°,90°的檢偏器布置方案有著更大的計算復雜度,但在使用相同信噪比相機的情況下,該布置方案的噪聲更小。該結論將對天空偏振光成像裝置的構建及其誤差分析與補償技術提供參考。
仿生偏振光導航; 偏振成像; 天空散射光; 成像噪聲模型
0 引 言
仿生偏振光導航是近年來發展起來的一種新原理導航方式。研究者最早在昆蟲的覓食行為中發現其具有利用天空散射光的偏振特性進行導航的本領[1,2],國內外的學者也根據這樣的原理研制了偏振導航樣機,目前,該類型的偏振導航樣機主要分為點源式[3~5]和成像式[6~8]的偏振導航樣機。成像式偏振導航樣機較點源式偏振導航樣機能夠獲得更為豐富的信息,因而具有精度高,抗干擾性強的優勢。為了研究昆蟲導航的信息源—天空散射光,學者們開發出了多種天空偏振光成像裝置[7,9,10],這類天空偏振成像裝置和成像式偏振導航樣機多以線性偏振片作為檢偏器,以成像芯片作為光電轉換裝置。
由于成像芯片在成像的過程中存在著噪聲,而偏振角度的測量是靠多次測量的光強度計算而來,是一種間接的測量方式。目前并沒有描述成像傳感器噪聲與偏振測量精度的工作。本文分析成像傳感器的光電轉換過程及其誤差源,并對其進行了建模。根據兩種典型的偏振測量模型,將成像傳感器的噪聲傳遞到偏振角度的測量結果上,對測量噪聲進行了仿真分析。本文的結論可以對天空偏振光成像裝置的構建,及其相機的選型提供參考。
1 偏振測量模型
偏振成像裝置主要有分視場成像,分像平面成像以及分時成像等。雖然這幾類偏振成像測量裝置的結構有較大的差異,但測量原理幾乎相同。以分視場偏振成像裝置為例,如圖1所示。入射的偏振光通常采用Stokes參量[IQUV]T描述[11,12],由于用于偏振光導航的天空光中幾乎沒有圓偏振分量,因此,Stokes參量退化為[IQU]T。設入射光使用[IinQinUin]T表示,則通過透光軸與測量軸夾角為θ的檢偏器的光強度為
(1)
由式(1)可知,要測得入射光的Stokes參量,只需改變檢偏器相對于測量軸的角度,如式(2)所示,可解得入射光的Stokes參量,即
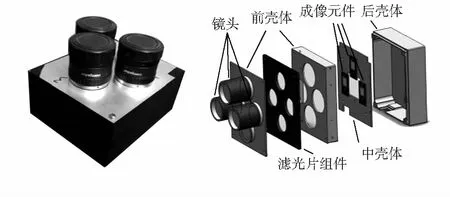
圖1 分視場偏振成像裝置示意圖

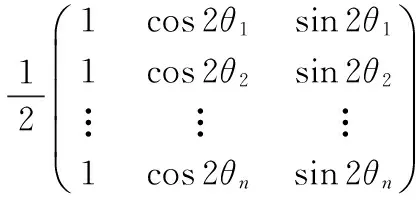
(2)
根據式(2),若n>3構成超定方程,通過最小二乘法等最優化方法可以提高偏振測量的精度,但對測量時間和測量成本均有著較高的需求。當n=3且矩陣并非病態矩陣時,則可以解得入射光的Stokes矩陣。
當n=3時,設檢偏器1的透光軸為測量參考軸,檢偏器2與檢偏器3相對于測量軸的角度分別為α,β,則測量矩陣的條件數分布如圖2所示。
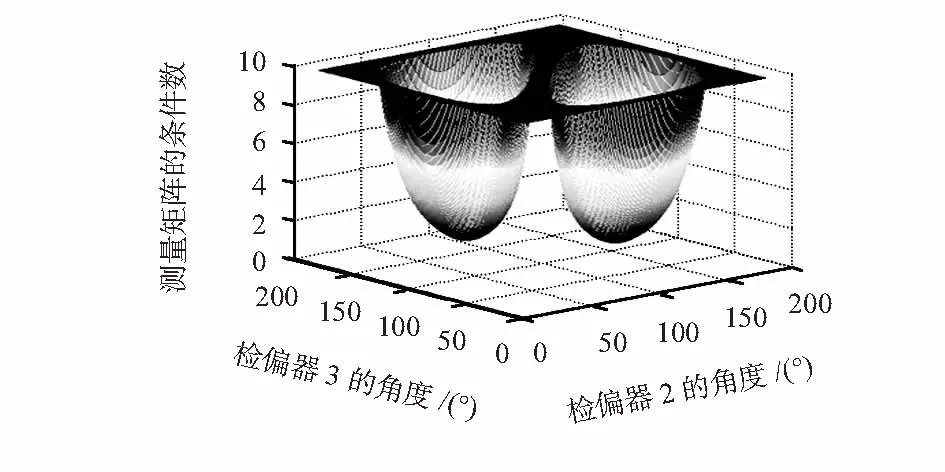
圖2 檢偏器2,3相對于參考軸的角度對測量條件數的影響
由圖2可以看出:當檢偏器之間相對角度較大時,測量矩陣的條件數較小,對誤差的放大作用小;當檢偏器的透光軸較為接近時,則測量矩陣較為病態,將會放大誤差,不適宜測量;當三個檢偏器分別為0°,60°和120°時,測量矩陣的條件數最小,為最優的測量矩陣。在工程實現中,為了方便運算,采用0°,45°和90°布置方案,該方案的優勢在于計算量小。兩種方案的檢偏器的測量矩陣分別為
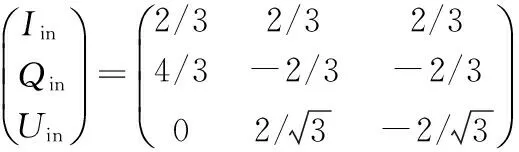
(3)
(4)
本文將對上述兩種典型狀況的偏振角度測量噪聲進行分析與仿真。
2 相機的噪聲模型

(5)
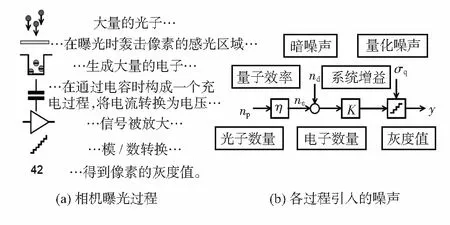
圖3 相機的曝光過程及各過程引入的噪聲

(6)
聯立式(5),則有
(7)
由式(7),傳感器的噪聲受到光強度、放大器放大倍數以及放大器噪聲等因素影響,為了更為直接地表達噪聲,可以使用信噪比(SNR)描述相機的噪聲水平。由于相機接收到的電子可以定義為
μy=μdark+Kημp
(8)
由式(7)和式(8),SNR可以定義為
(9)
由式(9)可知SNR是測量信號的函數,為了分析方便,通常忽略量化噪聲和放大器噪聲,假設光電轉換效率為100 %,則此時該傳感器可稱之為理想傳感器,理想傳感器的SNR為
(10)
通常,相機標稱的SNR為相機在臨界飽和狀態時的SNR。
3 仿真結果與分析
根據相機的噪聲模型以及偏振測量模型,偏振測量噪聲模型如式(11)
Smeasure=A-1(AS+N)
(11)
式中A和A-1為偏振測量矩陣及其逆矩陣,S為入射光線的Stokes參量,N為相機的噪聲向量。由于3臺相機或者3次曝光時相對獨立的,因此,N向量的3個分量是獨立同分布的隨機變量。根據相機式(10),N的分布如式(12)
(12)
仿真條件:入射光角度范圍為-90°~90°,入射光強度為200DN,相機飽和光強度為255DN,相機SNR為40~50dB,檢偏器布局為[0° 45° 90°]和[0° 60° 120°],重復測量次數為100 000。
仿真結果如圖4和圖5所示。
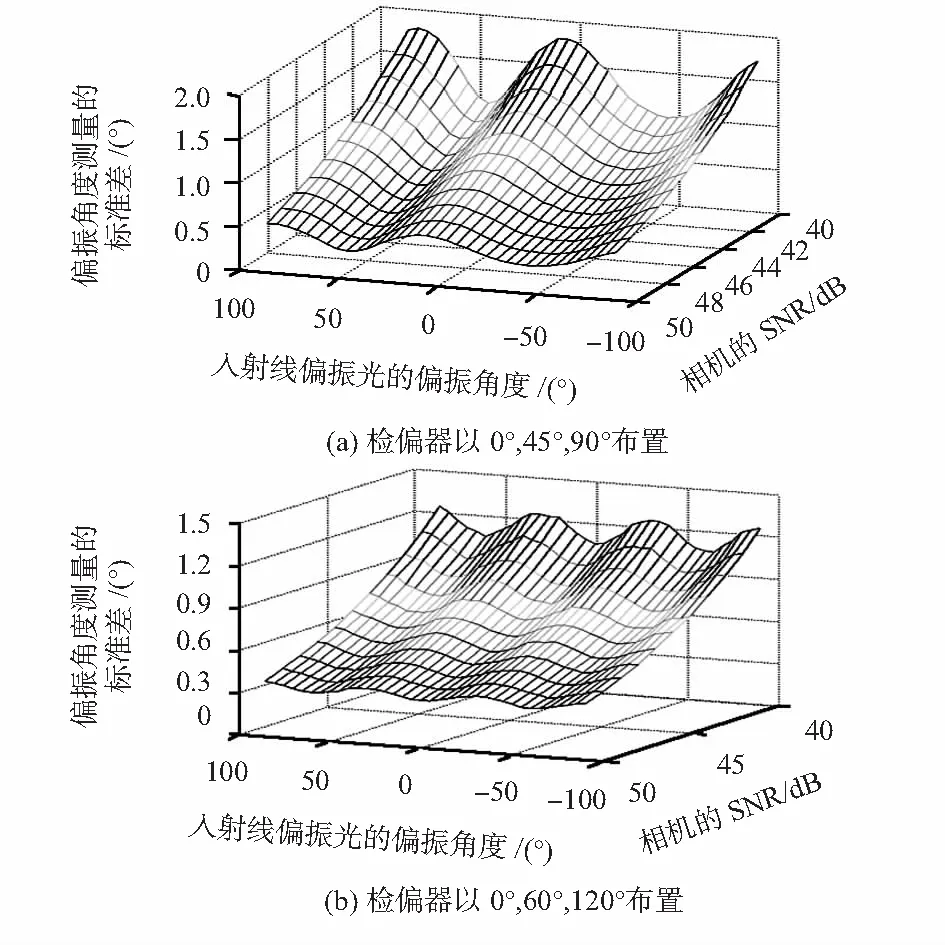
圖4 不同SNR相機,不同入射偏振光角度的測量標準差
由圖4的仿真結果的標準差可以看出:誤差的大小與入射光偏振角度和相機的SNR是相關的,SNR越大,偏振方位角的測量噪聲就越小;誤差與測量的入射光線的偏振角度相關,當采用0°,45°,90°的檢偏器布局時,當入射光更接近0°或90°時,偏振角度的測量誤差會相應的變大;在接近45°時取得極小值;當采用0°,60°,120°的檢偏器布局時,標準差在30°和90°時取得極大值;在0°,60°和120°附近取得極小值。對比兩幅圖可以看出,在相同SNR下,采用0°,60°,120°檢偏器布局的測量比采用0°,45°,90°的檢偏器布局的測量噪聲更小,這與第二部分根據條件數對于偏振檢測布局誤差分析的結果一致,但由于采用0°,45°,90°的計算測量矩陣的運算量更小,因此,該方法也被作為常用的一種測量方案。
測量均值的偏差如圖5所示。
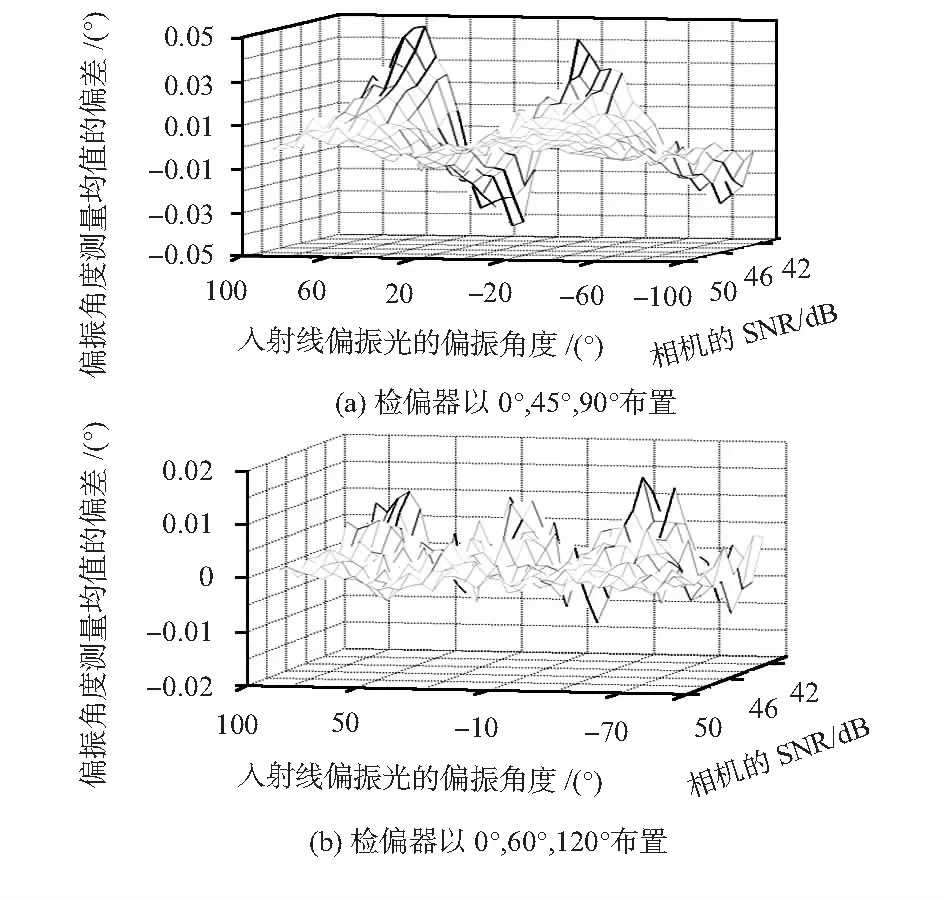
圖5 不同SNR相機,不同入射偏振光角度的測量均值的偏差
由圖5可以看出:均值偏差的分布狀況與標準差的分布狀況類似,當SNR足夠大時,均值的偏差將會足夠小,在測量時可以忽略,若SNR不夠大,則需要考慮相應的補償方法。均值的偏差與測量的入射光線的偏振角度相關,當采用0°,45°,90°的檢偏器布局時,當入射光更接近±45°時,偏振角度的測量均值的偏差會相應的變大;當入射偏振光接近0°或90°時,偏振角度的測量均值的偏差會偏小;同樣當采用0°,60°,120°的檢偏器布局時,均值偏差的分布與方差分布類似;當SNR大于46 dB時,均值的偏差優于0.005°,在大部分測量的情況下可忽略該偏差。
4 結 論
本文根據天空偏振光的特性,對目前常見的偏振光成像的測量過程進行了建模,分析了不同的檢偏器布置方式對誤差的放大作用,論證了以0°,60°,120°和0,45°,90°布置檢偏器的優勢和不足。根據相機的成像過程對相機的噪聲進行建模,并將相機的誤差模型引入到偏振成像的過程中,得到了相機噪聲向偏振角度測量噪聲的傳遞模型。通過仿真分析的方法,得到了不同SNR的相機,在不同入射偏振光偏振角度的情況下,偏振角度測量的噪聲的強度值及其均值的偏差曲線。仿真結果表明:偏振方位角的測量噪聲程度隨相機的SNR增大而減小,與入射光的角度相關,呈周期函數分布;當相機的SNR大于44 dB時,偏振角度測量的標準差優于0.1°/像素。同樣,偏振方位角測量噪聲均值的偏差也有與測量噪聲強度相對于SNR和入射光偏振角度有一致的特性。當采用0°,60°,120°方案布置檢偏器,使用的相機SNR優于46 dB時,測量的系統偏差將優于0.005°/像素,噪聲強度將小于0.5°/像素。本文的模型及結論將對偏振成像裝置的選型與構建具有重要意義。
[1] Rossel S,Wehner R.Polarization vision in bees[J].Nature,1986,323(6084):128-131.
[2] Labhart T,Keller K.Fine structure and growth of the polarization-sensitive dorsal rim area in the compound eye of larval cricket-s[J].Naturwissenschaften,1992,79(11):527-529.
[3] Chu J,Zhao K,Wang T,et al.Construction and performance test of a novel polarization sensor for navigation[J].Sensors and Actuators A:Physical,2008,148(1):75-82.
[4] Lu H,Zhao K,Wang X,et al.Real-time imaging orientation determination system to verify imaging polarization navigation algorithm[J].Sensors,2016,16(2):144.
[5] Ma T,Hu X,Zhang L,et al.An evaluation of skylight polarization patterns for navigation[J].Sensors,2015,15(3):5895-5913.
[6] Stürzl W,Carey N.A fisheye camera system for polarisation detection on UAVs[C]∥European Conference on Computer Vision,2012:431-440.
[7] 盧 皓,趙開春,馬 強,等.采用連續旋轉檢偏器的天空偏振光探測裝置設計與實現[J].宇航學報,2014,35(9):1087-1094.
[8] 趙開春,盧 皓,尤 政.天空光偏振模式自動探測裝置[J].光學精密工程,2013,21(2):239-245.
[9] Mcmaster W H.Polarization and the stokes parameters[J].American Journal of Physics,1954,22(6):351-362.
[10] Mcmaster W H.Matrix representation of polarization[J].Reviews of Modern Physics,1961,33(1): 8-28.
Noise modeling and analysis of polarization imaging for scattered skylight*
LU Hao1,2, ZHAO Kai-chun1, YOU Zheng1, HUANG Kao-li2
(1.Department of Precision Instrument,Tsinghua University,Beijing 100084,China;2.Ordnance Engineering College,Shijiazhuang 050003,China)
Bio-inspired polarization navigation is a new navigation method.More polarization information and distribution pattern will be gathered through imaging the scattered skylight and it will enhance the precision and anti-interference ability of polarization navigation sensors.The measurement noise of the polarization angle based on Stokes parameters is modeled and the simulation is conducted according to the principle of the polarization measurement of Stroke parameters and the noise model of imaging cameras.The result shows that to enhance the signal-to-noise ratio of cameras will enhance the quality of the polarization imaging significantly.The deviation of the measurement of the polarization angle will better than 1° per pixel when the signal-to-noise ratio is higher than 44 dB.The statistical distribution characteristics for different polarization angle incident lights is obtained under the condition that the analyzers is arranged as 0, 60°,120°and 0,45°,90°.The measurement noise of the analyzers arrangement of 0,60°,120° is less using the same signal-to-noise ratio cameras though the computational complexity of the arrangement of 0,60°,120°is more complex than the arrangement of 0,45°,90°.The conclusion will be the reference for the construction of the polarization imaging facilities for polarized skylight,its error analysis and compensation technology.
bio-inspired polarization navigation; polarization imaging; scattered skylight; imaging noise model
10.13873/J.1000—9787(2017)04—0012—03
2017—01—18
國家“863”計劃資助項目(2013AA122601)
TH 741
A
1000—9787(2017)04—0012—03
盧 皓(1989-),男,博士研究生,主要研究方向為仿生導航傳感器研究。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
