電動汽車永磁無刷輪轂電機控制策略建模
2017-04-07 09:08:00鄭淑琴龍江啟
中國機械工程 2017年6期
鄭淑琴 龍江啟
1.重慶大學建設管理與房地產學院,重慶,4000452.溫州大學機電工程學院,溫州,325035
電動汽車永磁無刷輪轂電機控制策略建模
鄭淑琴1龍江啟2
1.重慶大學建設管理與房地產學院,重慶,4000452.溫州大學機電工程學院,溫州,325035
針對輪轂電機的獨立控制問題進行研究,分析輪轂電機的基本結構和類型,建立了無減速機構的輪轂電機動力學計算模型,探討輪轂電機電磁轉矩的控制方法。在理論分析的基礎上,建立了輪轂電機的直接轉矩控制方法模型、車輛控制模型和地面負載輸入模型,研究不同路面情況和控制轉矩輸入下,輪轂電機的滑移率和輪速的差異性關系以及制動過程中定轉子間隙變形情況,選擇了合適的輪轂電機制動控制方法。仿真和試驗結果表明,輪轂電機的轉矩控制方法具有控制精度高、響應迅速的特點,搭載輪轂電機的電動汽車具有良好的操縱穩定性。
電動汽車;輪轂電機;滑移率;直接轉矩控制
0 引言
零排放的純電動汽車被認為是解決目前日益嚴重的能源和環境危機的重要途徑[1-3],這幾年特別是中國,純電動汽車的發展非常迅速,但是純電動汽車的研發受到傳統汽車設計思路的極大束縛,未能充分地發揮電力驅動系統應該具有的技術優勢和特點,使得目前研發的純電動汽車受傳統的變速器控制技術、離合器控制技術和制動控制技術等因素的影響很大。
輪轂電機是這幾年發展起來的一種新型驅動電機技術,它可以根據電動汽車本身的特點靈活設計驅動形式,通過將電機安裝在車輪的內部來直接驅動車輪前進[1-4]。相比傳統驅動結構的汽車,輪轂電機驅動結構的優勢非常明顯[5-7]:①可以去掉復雜的變速箱、離合器、差速器、驅動半軸等傳動系部件,極大地提高了傳動效率;②能夠實現驅動電機對所在車輪的直接控制,提高了電動汽車的底盤可操縱性;③不受傳統驅動電機的機械結構、差速減速器和驅動半軸尺寸的限制,極大地節省了電動汽車的布置空間,使得電動汽車的造型設計更加靈活,可用空間更大。
本文研究的對象是一款前置前驅結構的純電動汽車,它將兩個輪轂電機安裝在車輪的前輪中作為車輪的驅動輪,后輪保留了傳統的機械制動裝置,因此同時兼具電機制動和機械制動的優點,制動系統的可靠性大大增加。
1 前置前驅純電動汽車基本結構
輪轂電機就是將輪轂和驅動裝置直接合并為一體的驅動電機,也就是將驅動電機、傳動裝置和制動裝置都整合在輪轂中,也稱之為輪式電機(wheel motor)[8-9]。輪轂電機從驅動結構上又分為有減速機構的輪轂電機和無減速機構的輪轂電機兩種。有減速機構的輪轂電機也稱之為減速驅動電動輪,減速器安裝在電動機和車輪之間,起到了減速增扭的作用,減速裝置一般采用行星齒輪減速機構,這種輪轂電機的特點是對電機要求不是很高,內轉子電機轉速最高可達10 000 r/min,具有較高的比功率和效率,體積小,質量輕,輸出扭矩大,爬坡性能好,能夠保證汽車在低速行駛時獲得較為平穩的大扭矩。但其缺點是潤滑困難,行星齒輪減速機構磨損較快,使用壽命短,散熱不易,工作噪聲大[10-12]。
無減速機構的輪轂電機又稱為直接驅動電動輪,電機選用低速外轉子電機,電機的外轉子直接和輪轂機械連接,無減速機構,電機的轉速一般在1500 r/min左右,車輪的轉速與電機轉速一致。無減速機構的輪轂電機的特點是結構緊湊,軸向尺寸小,非簧載質量小,傳遞效率更高,缺點是對電機要求比較高,在電動汽車起步或者爬坡等情況下需要承載大轉矩時需要動力電池輸出較大的電流,電機的峰值效率區域小,負載電流超過一定值后效率下降非常明顯。
隨著電動汽車的飛速發展,選用輪轂電機的電動汽車獲得了前所未有的重視和發展,日本的本田公司、三菱汽車公司,美國的通用汽車公司,德國的大眾公司,中國的廣汽集團和奇瑞公司等整車企業紛紛推出了自己的搭載輪轂電機的電動汽車。
輪轂電機雖然擁有優越的性能和較小的安裝尺寸,但是相比傳統的驅動電機,其高昂的價格仍然是不可忽視的重要因素,如果電動汽車的4個輪子全部采用輪轂電機驅動,則帶來了以下需要解決的問題:①取消機械差速器之后,需要控制系統協調解決不同驅動輪之間的差速問題;②各個驅動輪的轉速和扭矩之間相互獨立,需要控制系統解決驅動力協調分配的問題;③輪轂電機通常都采用獨立懸架,非簧載質量增大,電動汽車垂直方向的振動幅度增大,影響輪胎的附著性能,降低了電動汽車的平順性和舒適性。
綜合考慮成本控制和降低控制系統開發難度,充分地發揮機械制動系統制動效率高、制動可靠和成本低廉的特點,本文重點研究圖1所示的一款前置前驅的純電動汽車結構,在該款電動汽車基本構架中,前面兩個驅動輪選用了輪轂電機,后面的兩個輪子則保留了傳統的汽車機械制動裝置,裝備了ABS/ESP裝置。

圖1 搭載輪轂電機的純電動汽車構架Fig.1 Electric vehicle architecture with wheel motor
如圖1所示,輪轂電機和對應的電機控制器均安裝在電動汽車的兩個前輪內,輪轂電機選用無減速機構輪轂電機。動力電池箱體的電源通過J-BOX裝置分配到各個用電單元(純電動空調、電機控制器、DC/DC以及PTC(positive temperature coefficient)加熱器),動力電池箱體上連接有慢充和快充裝置。
2 前置前驅輪轂電機型純電動汽車的動力學方程
該款純電動汽車的動力學模型是在滿足所研究問題精度的基礎上,對車輛系統進行必要的簡化后得到的,其本質還是利用車輛的數學模型來建立外界激勵對電動汽車模型的輸入、車輛系統本身以及車輛系統對外界的輸出三者之間的關系。圖2所示為單個輪轂電機的計算模型。圖2中,m31為支撐結構和制動卡鉗等的質量,m32為輪轂電機的定子和殼體的質量,m33為輪轂電機轉子和制動盤的質量,yi為不同質量塊對應的位移,kj分別代表懸置零部件的剛度,ck分別代表彈性零部件的阻尼[9]。
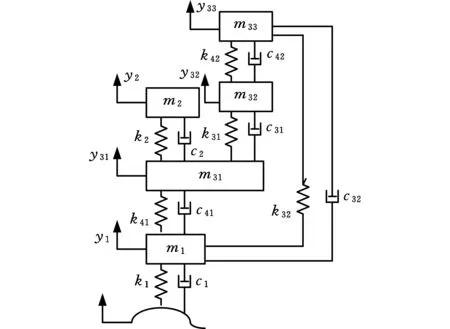
圖2 輪轂電機的計算模型Fig.2 Wheel motor calculation model
忽略懸架特性,建立電動汽車動力學模型方程如下:
(1)
(2)
0.5df(Fxflsinδo-Fxflsinδi)+0.5dr(Fxrr-Fxrl)
(3)
式中,m為整車質量;vx和vy分別為整車縱向速度和側向速度;v為車速;Fx和Fy分別為車輪受到的縱向力和側向力;下標fl、fr、rl和rr分別代表左前輪、右前輪、左后輪和右后輪;δi和δo分別為前輪內外車輪的轉向角;f為車輪滾動阻力系數;g為重力加速度;α為道路坡度角;CD為空氣阻力系數;A為迎風面積;ρ為空氣密度;lf和lr分別為汽車質心到前后軸的距離;df和dr分別為前后軸車輪輪距;Iz為車輛Z軸轉動慣量;γ為橫擺角速度。
輪轂電機受力方程為
Tmi-Tf=Jmidωm/dt
(4)
式中,Tmi為輪轂電機的扭矩;Tf為車輪的阻力矩;Jmi為折算到電機的轉動慣量;ωm為電機和車輪的轉速。
輪胎的滑移率計算公式為[7]
(5)
式中,si為輪胎滑移率;r為車輪半徑。
3 輪轂電機控制方程
設計的輪轂電機采用自控式變頻調速方法,在電機軸上安裝有轉子磁極位置監測器,通過檢測出來的轉子磁極位置,控制定子側變頻器的電流頻率和相位,使定子電流和轉子磁鏈總是保持確定的關系,從而產生恒定的轉矩。轉矩控制模式下轉子坐標系(d-q軸系)中的輪轂電機定子磁鏈方程為
(6)
式中,ψd和ψq分別為定子磁鏈矢量的d軸分量和q軸分量;Ld和Lq分別為輪轂電機的直軸和交軸主電感;ψr為轉子磁鏈在定子上的耦合磁鏈。
輪轂電機的定子電壓方程為
(7)
式中,Usd和Usq為定子電壓Us的d、q軸分量;Isd和Isq分別為定子電流Is的直軸、交軸分量;ω為轉子角頻率;p為微分因子;Rs為定子電阻。
由轉矩方程式Tes=npψrIs(np為定子和轉子之間的相對轉速差,Tes為定子的電磁轉矩)可以得到輪轂電機的電磁轉矩為
(8)
式中,δ為負載角,即定子磁鏈矢量ψs和轉子磁鏈矢量ψr之間的夾角。
輪轂電機的控制方法選用Hopfield網絡直接轉矩控制方法(圖3),該方法可以在電機的轉矩和轉速變化過程中,自動跟蹤控制目標轉矩和轉速的變化,動態修正和優化輪轂的轉矩和轉速控制參數,在計算過程中可以根據運行規則不斷進行狀態的變化,能夠迅速收斂到目標函數,跟蹤誤差也能自動收斂到很小的范圍內,具有良好的轉矩跟蹤效果。
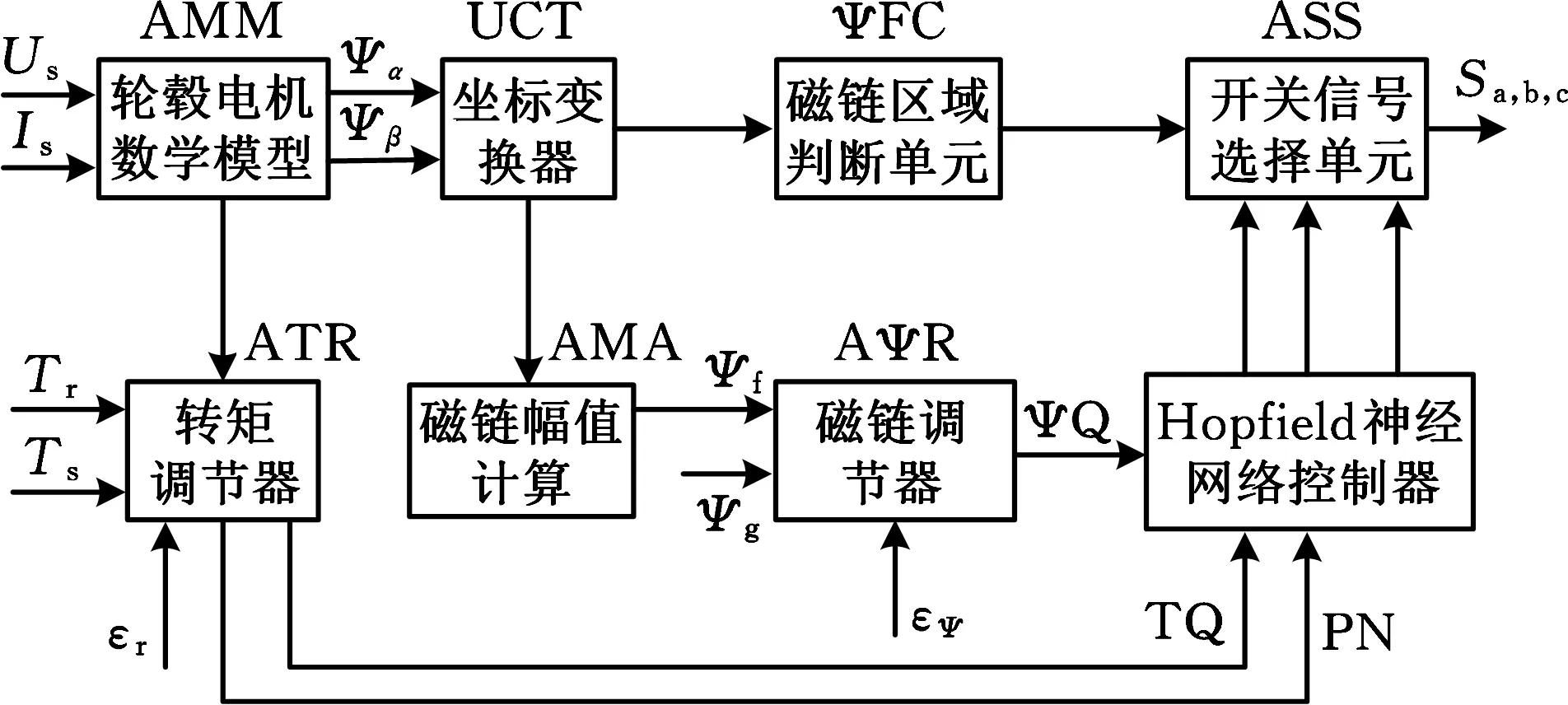
圖3 輪轂電機直接轉矩模式控制系統框圖Fig.3 Thedirect torque mode control system block diagram of wheel motor
對于Hopfield神經網絡的第i個神經元,其輸入輸出關系有
(9)
用能量函數描述Hopfield網絡的動態穩定性,有
(10)
令權值矩陣W對稱,則有
(11)
假設輪轂電機的轉動慣量為J=JaRa/ke,Ja為電機的a相轉動慣量,Ra為電機的a相電阻,ke為與電機轉速ω相關的調整參數。設L為電機電樞電感,電機的速度指令nd=dω/dt,忽略電機的a相電樞繞組的電感,則整個輪轂電機的Hopfield控制器變成了比例控制+前饋控制模式。假設K=1/J,則在K1=KP的情況下,有K2=KP+kf(KP為比例控制參數,kf為與nd相關的調整參數),K3=kf/J。K1和K2為Hopfield控制器的辨識參數,K3為常量。則Hopfield網絡的標準能量函數為
(12)
(13)

(14)
外部輸入矩陣為
(15)
取神經元輸出非線性特性函數為雙曲函數:
(16)
式中,λi為求解出來的特征值;Si為第i個神經元輸出值。
網絡輸出為
K1=g(u1)
K2=g(u2)
由此可以得到
(17)
通過求解微分方程式(17)可以得到優化以后的K1和K2,從而實現KP和kf的整定。
4 仿真計算模型
圖4所示為用 MATLAB/Simulink建立的電動汽車路面力學計算模型。圖4中的系統輸入in1、in2、in3分別是根據車身模型計算得到的滑移率、側偏角和輪胎力。同時,將輪胎力輸入到車身模型中計算所需的車體運動學參數,再返回到輪胎模型中。圖5所示為輪胎力計算模型。

圖4 路面力學計算模型Fig.4 Ground mechanics calculation model
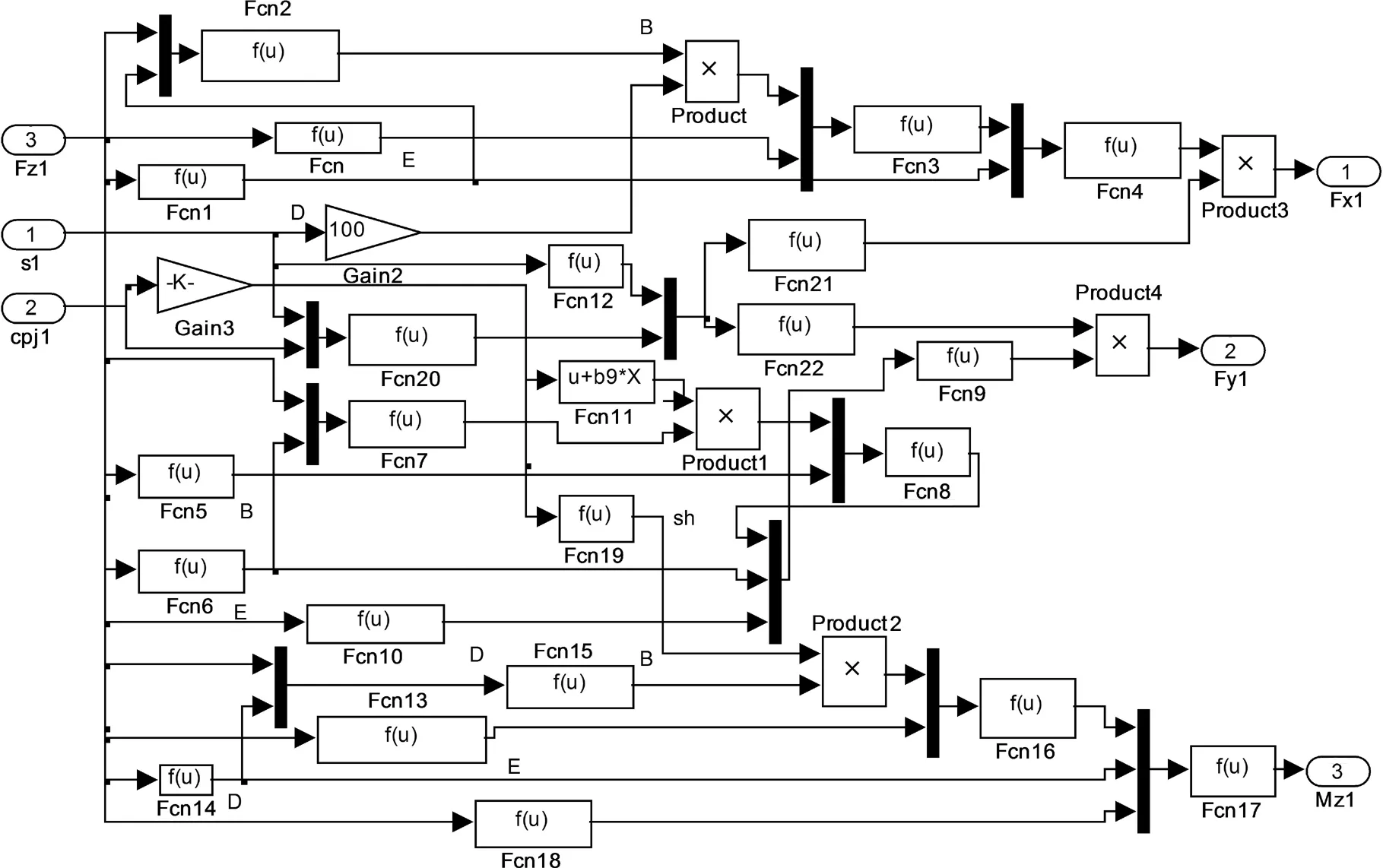
圖5 輪胎力仿真計算模型Fig.5 Tire force simulation calculation model
電動汽車的仿真計算參數輸入如下:整車整備質量1735 kg,行駛阻力曲線為Ff=177.8+1.668v+0.027v2,旋轉質量換算系數1.05,空氣阻力系數0.295,迎風面積2.28 m2,輪胎滾動半徑0.307 m,仿真電機參數選自輪轂電機的外特性曲線(單個輪轂電機的峰值功率為80 kW),電機的定子電阻為1.5 Ω,電感為0.006 H,轉子電阻為1.4 Ω,電感為0.0059 H,自感系數為0.18 H,轉動慣量為0.145 kg·m2,摩擦因數為0.003。
圖6所示為仿真計算得到的路面跳變情況下,左右兩個輪轂電機(即車輪)行駛過程中的滑移率和時間的變化關系。仿真工況設計如下:車輛在干瀝青路面以0加速到50 km/h,以此加速度維持3 s,然后進入低附著路面行駛3 s。
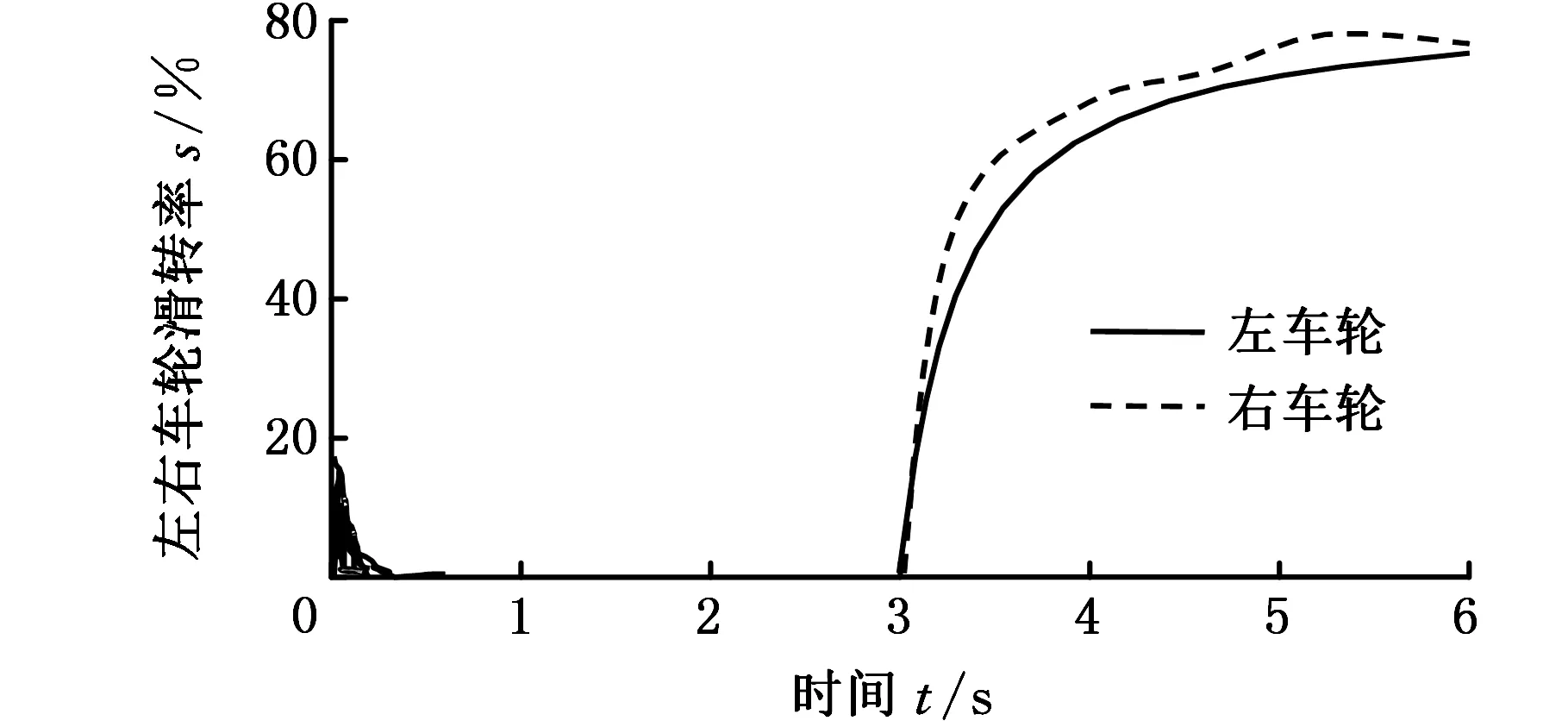
圖6 左右車輪滑移率隨時間變化情況Fig.6 The wheel slip rate changes with time
由圖6可知,在良好附著條件下,左右兩個輪轂電機驅動的車輪滑移率較小,兩個車輪的角加速度和角速度幾乎相等。在低附著路面,兩邊車輪的滑移率增大,但是差值仍然很小。
圖7所示為仿真計算得到的左右兩個車輪的輪速和車速與時間的變化情況,由圖7可知,在變負載變工況的路面上,輪轂電機選用轉矩耦合控制方法可以很好地控制電動汽車完成驅動、差速的功能。
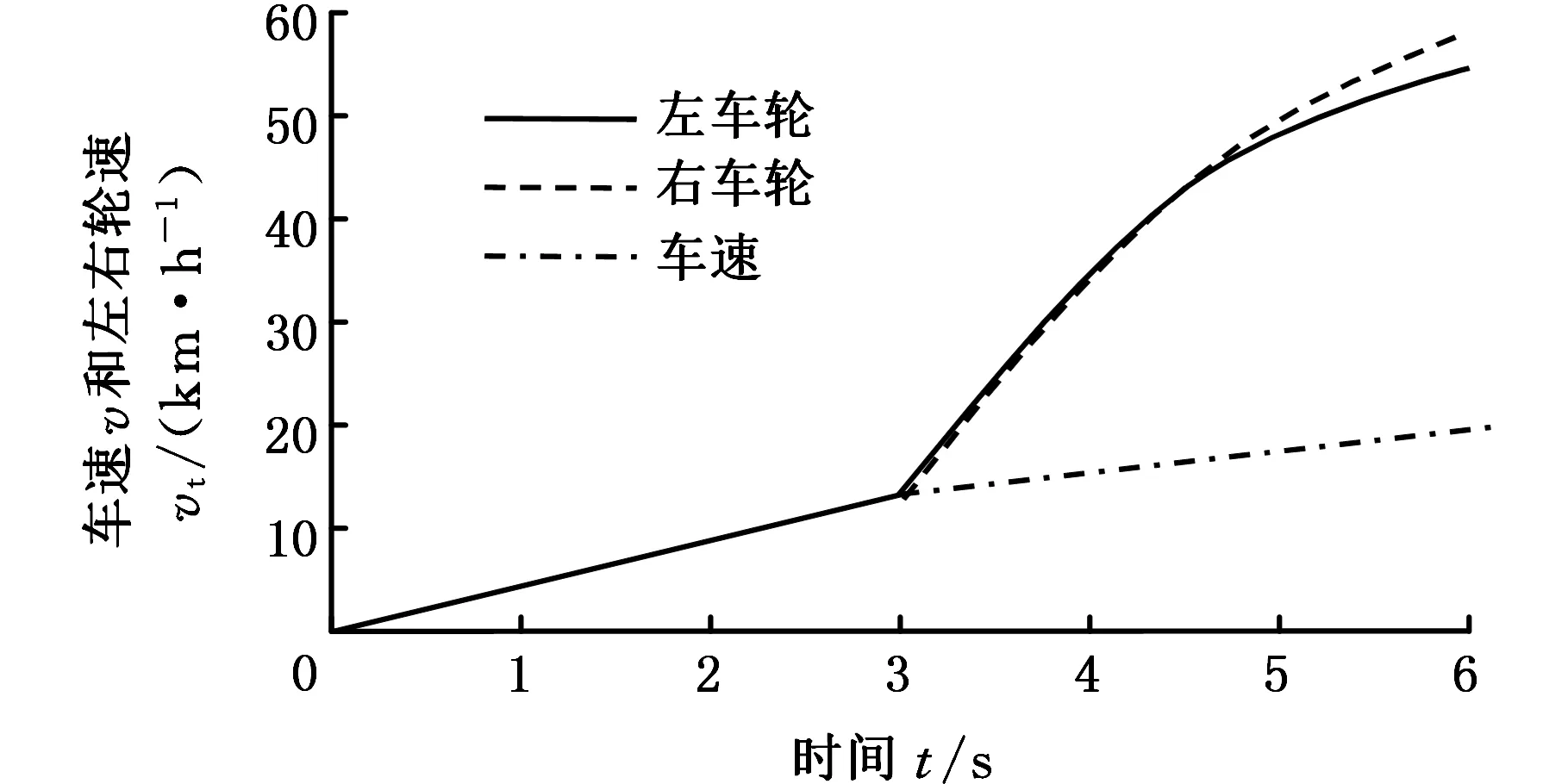
圖7 左右輪速度相差率隨時間變化情況Fig.7 The difference rate of the left and right wheel speed varies with time
接下來分析輪轂電機控制方法在制動方面的效果并選擇合適的制動控制方式。
設輪轂電機的輪荷為455 kg,最大地面摩擦因數取1.2,輪胎半徑為0.307 m,最大制動力矩M=455×9.8×1.2×0.307=1642.7 N·m;單制動鉗最大制動力F1=M/r=1642.7/0.1875=8761.1 N。雙制動鉗最大制動力為F1的一半。
由圖8和表1可知,在考慮最大地面制動力的情況下,雙制動鉗方案的最大總位移約為單制動鉗方案最大位移量的1/6,且遠小于1 mm,考慮到輪轂電機的定子和轉子的間隙為1 mm,為了保證制動情況下輪轂電機的制動盤和轉子外殼在變形的情況下仍能保持足夠的間隙,因此選用雙制動鉗方案作為輪轂電機的制動方案。
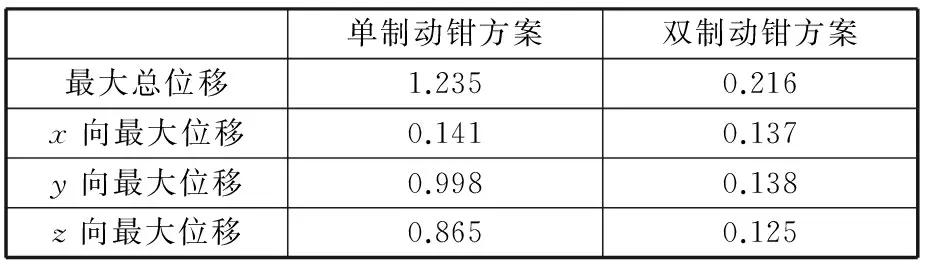
表1 輪轂電機不同制動方案仿真計算結果
5 試驗驗證
將輪轂電機安裝在電動汽車上進行實車測試驗證。圖9所示為試驗得到的輪轂電機轉矩控制精度的測試結果。試驗方法如下:將電動汽車通過舉升機抬離地面,輪轂電機即輪胎不與地面接觸,通過在線標定整車控制器軟件的方式控制輪轂電機的旋轉方向和輸出轉矩進行試驗。首先控制輪轂電機在30 kW的恒定功率下正轉,然后由整車控制器給輪轂電機一個75 kW的階躍轉矩請求,記錄CAN總線上的數據,觀察電機的轉矩控制精度是否滿足設計要求。
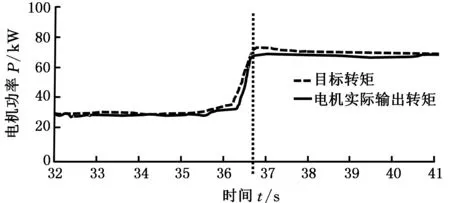
圖9 輪轂電機轉矩控制精度試驗結果Fig.9 Wheel motor torque control accuracy test results
由圖9可知,在低轉矩模式下,輪轂電機的輸出扭矩和目標扭矩的值相差非常小,幾乎重合,在目標轉矩階躍變化的情況下,電機的實際輸出轉矩的響應速度稍慢于目標轉矩的響應速度,在目標轉矩穩定后,輪轂電機的實際輸出轉矩迅速達到穩定值73.5 kW,稍微低于目標轉矩值。電機轉矩控制誤差約2%,滿足≤5%的控制誤差的設計要求。
圖10所示為定半徑穩態回轉試驗中實際測量得到的電動汽車的橫擺角速度和轉向盤轉角的對應關系與原型車的對比結果。由圖10可知,搭載了輪轂電機后的電動汽車的橫擺角速度和轉向盤轉角關系相比原型車變化不大,而原型車的眾多試驗結果表明其具有良好的操縱穩定性,因此搭載了輪轂電機后的電動汽車同樣具有良好的操縱穩定性。
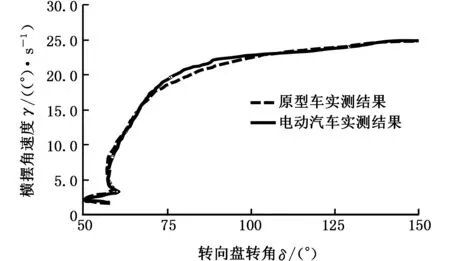
圖10 電動汽車橫擺角速度/轉向盤轉角試驗結果Fig.10 The test results of electric vehicle acceleration steering wheel corner
搭載了輪轂電機的電動汽車動力性仿真計算和試驗驗證的結果如表2所示。由表2可知,設計的輪轂電機驅動結構電動汽車的仿真和試驗結果非常接近,且均滿足設計指標要求。
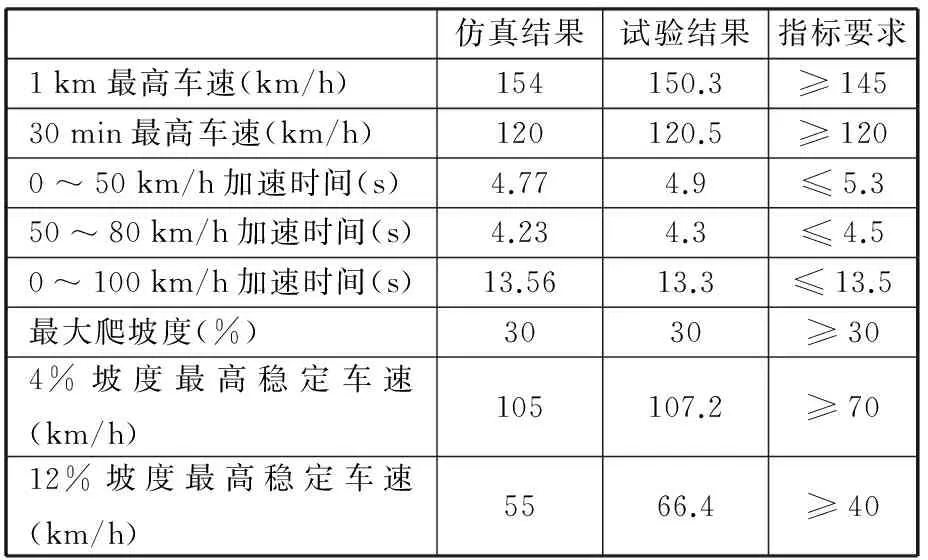
表2 輪轂電機電動汽車動力性仿真試驗結果
該款電動汽車的綜合耐久性試驗(20 000km)、制動耐久性試驗結果也證明,搭載了輪轂電機的電動汽車具有良好的制動耐久性能和綜合耐久性能。
6 結論
(1)針對電動汽車用輪轂電機控制方法進行研究,研究了前置前驅動結構的電動汽車的動力學方程,建立了輪轂電機的控制計算模型,通過仿真計算和試驗驗證的方法,證明了輪轂電機控制方法具有良好的控制效果。
(2)選用Hopfield網絡控制方法改進輪轂電機的控制,具有良好的控制效果和響應速度。
(3)具備前置前驅的輪轂電機方案的電動汽車具有良好的動力學特征,操縱穩定性相比原型車沒有明顯下降。
輪轂電機的控制方法和在電動汽車上的測試應用還需要更多的測試數據不斷地積累和完善。本文的研究結果對輪轂電機在電動汽車的應用研究具有參考作用。
[1] 姚榮子.電動汽車用永磁同步輪轂電機轉矩跟蹤控制[D].長春:吉林大學,2015.YAORongzi.TorqueTrackingControlofPermanentMagnetSynchronousIn-wheelMotorforElectricVehicle.[D].Changchun:JilinUninvesity, 2015.
[2] 王曉遠,高鵬. 基于進化策略的輪轂電機永磁體結構優化設計[J]. 中國電機工程學報,2012,35(4):979-984.WANGXiaoyuan,GAOPeng.OptimalDesignofPermanentMagnetsofIn-wheelMotorBasedonEvolutionStrategy[J].ProceedingsoftheCSEE, 2012,35(4):979-984.
[3]DeARRUDAEF,KAGANN,RIBEIROPF.HarmonicDistortionStateEstimationUsinganEvolutionaryStrategy[J].IEEETransactionsonPowerDelivery, 2010, 25(2):831-842.
[4]IFEDICJ,MECROWBC,BROCKWAYSTM,etal.FaultTolerantIn-wheelMotorTopologiesforHighPerformanceElectricVehicles[J].IndustryAppliactions, 2011,49(3):1249-1257.
[5]SUHIn-Soo.HWANGKaram,LEEMinyoung.In-wheelMotorApplicationina4WDElectricVehiclewithFoldableBodyConcept[C]//IEEEInternationalConferenceonElectricMachinesandDrives(IEMDC), 2013.Chicago:IEEE, 2013:1235-1240.
[6]HAKSUNK.IntegratedControlStrategyforTorqueVectoringandElectronicStabilityControlforinWheelMotorEV[C]// 2013WorldElectricVehicleSymposiumandExhibition(EVS27).Barcelona:IEEE, 2013:1-7.
[7] 趙艷娥,張建武. 輪轂電機驅動電動汽車電子差速系統研究[J]. 系統仿真學報,2008,20(18): 4667-4775.ZHAOYan’e,ZHANGJiangwu.StudyonElectronicDifferentialControlSystemofIndependentIn-wheelMotorDriveElectricVehicle[J].JournalofSystemSimulation,2008,20(18): 4667-4775.
[8] 盧東斌,歐陽明高,谷靖,等. 四輪驅動電動汽車永磁無刷輪轂電機轉矩分配[J]. 清華大學學報(自然科學版), 2012,52(4):451-456.LUDongbin,OUYANGMinggao,GUJing,etal.TorqueDistributionAlgorithmforaPermanentBrushlessDCHubMotorforFour-wheelDriveElectricVehicles[J].TsinghuaUniv.:NaturalSci., 2012,52(4):451-456.
[9] 譚迪.內置懸置的輪轂電機驅動系統動力學特性及結構優化[D]. 廣州:華南理工大學,2013.TANDi.DynamicsandStructureOptimizationoftheIn-wheelMotorSystemwithRubberBushing[D].
Guangzhou:SouthChinaUniversityofTechnology, 2013.
[10] 何任,張瑞軍.輪轂電機驅動技術的研究與進展[J].重慶理工大學學報(自然科學),2015,29(7): 10-18.HERen,ZHANGRuijun.ResearchandDevelopmentofIn-wheelMotorDriveTechnology[J].JournalofChongqingUniversityofTechnology(NaturalScience), 2015,29(7): 10-18.
[11] 孟慶華,許進,王東峰. 輪轂電機驅動型電動汽車動力系統研究[J]. 農業機械學報,2013,44(8): 33-37.MENGQinghua,XUJin,WANGDongfeng.PowerSystemofElectricVehicleDrivenbyIn-wheelMotors[J].TransactionoftheChineseSocietyforAgriculturalMachinery, 2013,44(8): 33-37.
[12] 盧東斌,李建秋,何濤,等. 四輪輪轂電機驅動電動汽車無刷電機控制算法的研究[J].汽車工程,2012,34(10): 871-893.LUDongbin,LIJianqiu,HETao,etal.AresearchontheControlAlgorithmforBrushlessMotorinFour-wheelHubMotorDriveElectricVehicle[J].AutomotiveEngineering, 2012,34(10): 871-893.
(編輯 蘇衛國)
Control Tactics Modeling of Electric Vehicle Permanent Magnet Brushless Wheel Motors
ZHENG Shuqin1LONG Jiangqi2
1.School of Construction Management and Real Estate,Chongqing University, Chongqing,400045 2.College of Mechanical Engineering,Wenzhou University,Wenzhou,Zhejiang,325035
According to the independent control problems of wheel motor, the wheel motor basic structures and styles were analyzed, and dynamics model without reduction mechanisms was built and the electromagnetic torque control methods of wheel motor were discussed. The electromagnetic torque control tactics, wheel motor direct torque control model, vehicle simulation model and ground input model were set up based on theoretic analyses. Wheel motor slip rates and wheel speed differences were researched under different loads and objective torque inputs, and a favorable breaking method was chosen by compare motor stator and rotor gap deformations. The simulation and tests indicate that torque control method have high control precision, rapid response characteristics, and electric vehicle has good handling and stability.
electric vehicle; wheel motor; slip rate; direct torque control
2016-05-11
國家自然科學基金資助項目(51475336);溫州市科技計劃資助項目(G20150001);浙江省自然科學基金資助項目(LQ15E060001)
U467.1
10.3969/j.issn.1004-132X.2017.06.018
鄭淑琴,女,1979年生。重慶大學建設管理與房地產學院博士研究生。研究方向為工程項目管理。E-mail:sq_zheng@qq.com。龍江啟,男,1974年生。溫州大學機電工程學院副教授、博士。