快速確定來襲魚雷距離方法研究*
2017-04-07 05:41:15吳漢云朱清浩臧江濤
艦船電子工程 2017年3期
吳漢云 朱清浩 臧江濤
(1.海軍潛艇學院 青島 266000)(2.92196部隊 青島 266000)
快速確定來襲魚雷距離方法研究*
吳漢云1朱清浩1臧江濤2
(1.海軍潛艇學院 青島 266000)(2.92196部隊 青島 266000)
當艦艇處于被來襲魚雷接近命中態勢下,被攻擊艦艇可以利用聲納的被動聽測方位,結合本艦艇的規避機動,進而采用“快速確定來襲魚雷距離”方法來隱蔽快速地確定來襲魚雷的距離。并通過比較繪算值與實際值之間的相對誤差,驗證了此種方法的可行性。
被動方位; 規避機動; 來襲魚雷距離
1 引言
針對敵潛艇發射的來襲魚雷,被攻擊艦艇無論采用聲抗器材對抗或艦艇機動規避等措施,艦艇長最關注的是如何快速獲取來襲魚雷的距離。如果利用通常的被動聽測方位解算來襲魚雷要素較慢[1~2],沒法滿足快速獲取的緊迫需求;如果采用主動聲納探測魚雷,將可能暴露本艦艇位置更難以擺脫來襲魚雷搜索跟蹤[3~4];因此,本文將研究一種能夠隱蔽、快速確定魚雷距離的方法。
2 基本原理
來襲魚雷從敵潛艇發射出管后,首先進行線導導引控制航行,一般距被攻擊艦艇3000m~4000m附近處魚雷斷線[5],航行一定時間后主動聲自導裝置開機搜索目標。根據現有聲納對魚雷報警的性能,艦艇發現來襲魚雷的距離一般大于30鏈[6]。
被攻擊艦艇接到魚雷報警后,保持原速航行10多秒后,發現來襲魚雷聽測方位基本不變,則可認為來襲魚雷(此時魚雷航向航速一定)朝向本艇命中接近,被攻擊艦艇決定采取機動規避。在規避的同時結合聽測方位,通過相應繪算隱蔽、快速的確定來襲魚雷距離,進而為艦艇合理采取對抗措施提供判斷的關鍵依據。
3 繪算方法
被攻擊艦艇以V1水下巡航時,在S1位置上接到聲納魚雷報警,測得來襲魚雷方位B1(對應我舷角為Q1),艦艇繼續航行發現來襲魚雷聽測方位基本不變,則可判斷來襲魚雷向艦艇接近命中。隨后,艦艇于S2點開始以V2轉向機動,并在S3點測得魚雷方位B2(對應我舷角為Q2)。

此外,被攻擊艦艇在遭受敵潛艇魚雷攻擊時,艦艇指揮員可根據本艦艇與來襲魚雷之間的概略態勢,采用合適的轉向機動來有效規避來襲魚雷搜索攻擊[7~8]。因此,根據艦艇機動轉向的不同,可分為“向轉”和“背轉”兩種模型。
1) 艦艇“向轉”規避魚雷的距離方法,如圖1所示。
圖1 艦艇“向轉”規避魚雷的距離方法
圖2 艦艇“背轉”規避魚雷的距離方法
由圖1可得,在S2位置點上測得魚雷的距離如下式所示:
其中:Δt23為我艦艇從S2位置上機動到S3位置上的時間。
2) 艦艇“背轉”規避魚雷的距離方法,如圖2所示。
由圖2可得,在S2位置點測得魚雷的距離如下式所示:
4 繪算參數設定
想定被攻擊艦艇V1=3節、V2=12節;開始轉向的時間為0.5min。來襲魚雷與艦艇構成接近命中[9],我艇在Q1<70°時“向轉”規避,在Q1>70°時“背轉”規避,選擇轉向大小為ΔC、以速度矢量V2航行1min后測得方位為B2。
參考世界現役魚雷主要性能,想定魚雷速度VT分別采用45節、40節、35節、30節;艦艇發現來襲魚雷的距離一般大于30鏈,因此D1分別采用為60鏈、50鏈、40鏈、30鏈;Q1分別采用為120°、90°、60°、30°、10°等不同態勢情況,ΔC分別為30(右)、60(右)、120(左)、90(左)、70(左),進行標圖作業測得實測值D2和Q2;再根據Q2繪出第二方位線,與初始方位線相交于一點,即可得出繪算值D2。由于在左右不同舷別下的繪算方法相同,因此在這不同態勢下的Q1均采用左舷值進行分析。
5 結果分析
本繪算方法采用以被攻擊艦艇為原心、方位B1為橫坐標建立起起相對坐標系。針對上述不同態勢情況,按照本繪算方法得到的魚雷當前距離D2數值如表1~4所示。
根據表1~4數據可以得到:在一定魚雷速度VT、一定實際距離D1,不同的我舷角為Q1的態勢下,繪算值與實際值之間的相對誤差曲線如圖3~6所示。
從表數據及圖曲線對比分析,可以得出:
1) 相對誤差隨著來襲魚雷速度VT、實際距離D1、我舷角Q1以及轉向角ΔC的變化而不同。
表1 實際D1=60鏈,繪算當前距離D2(鏈)

表2 實際D1=50鏈,繪算當前距離D2(鏈)
表3 實際D1=40鏈,繪算當前距離D2(鏈)
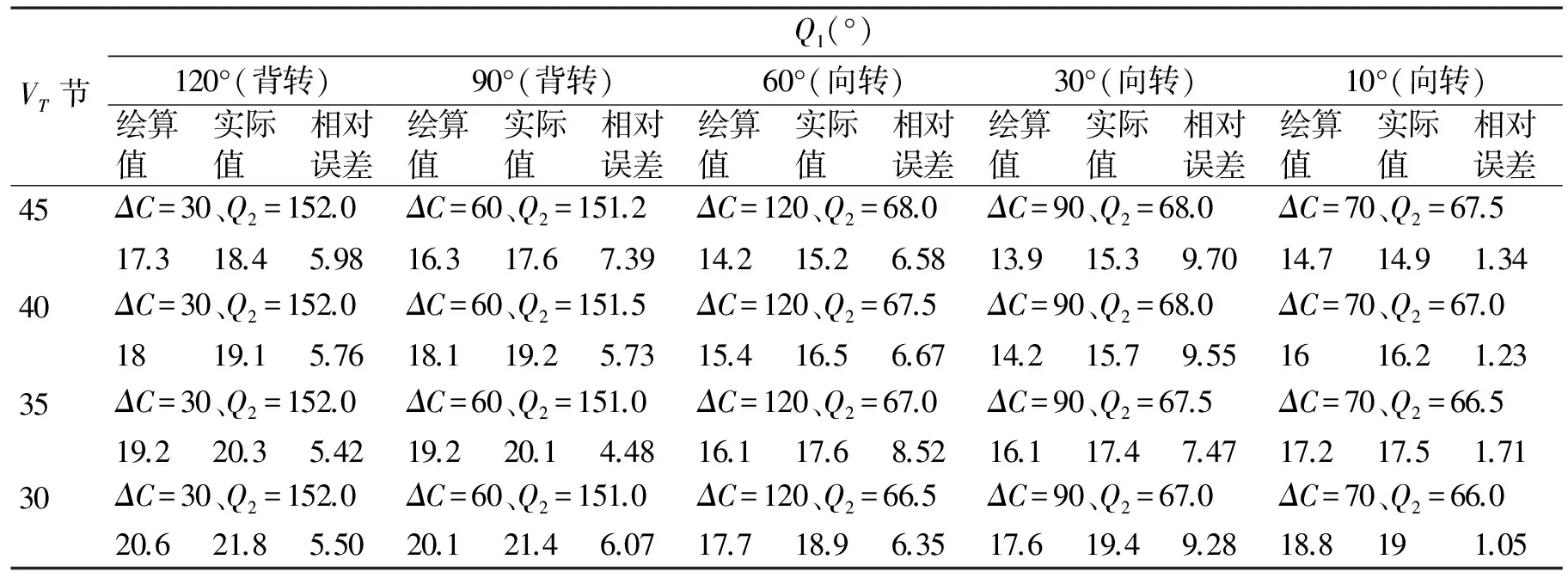
表4 實際D1=30鏈,繪算當前距離D2(鏈)
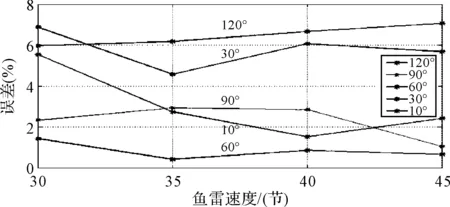
圖3 實際D1=60鏈,繪算值與實際值之間的相對誤差曲線圖
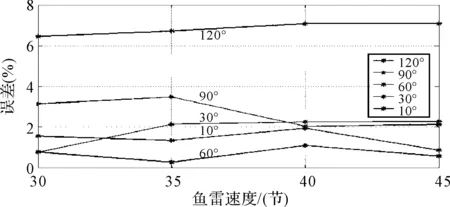
圖4 實際D1=50鏈,繪算值與實際值之間的相對誤差曲線圖
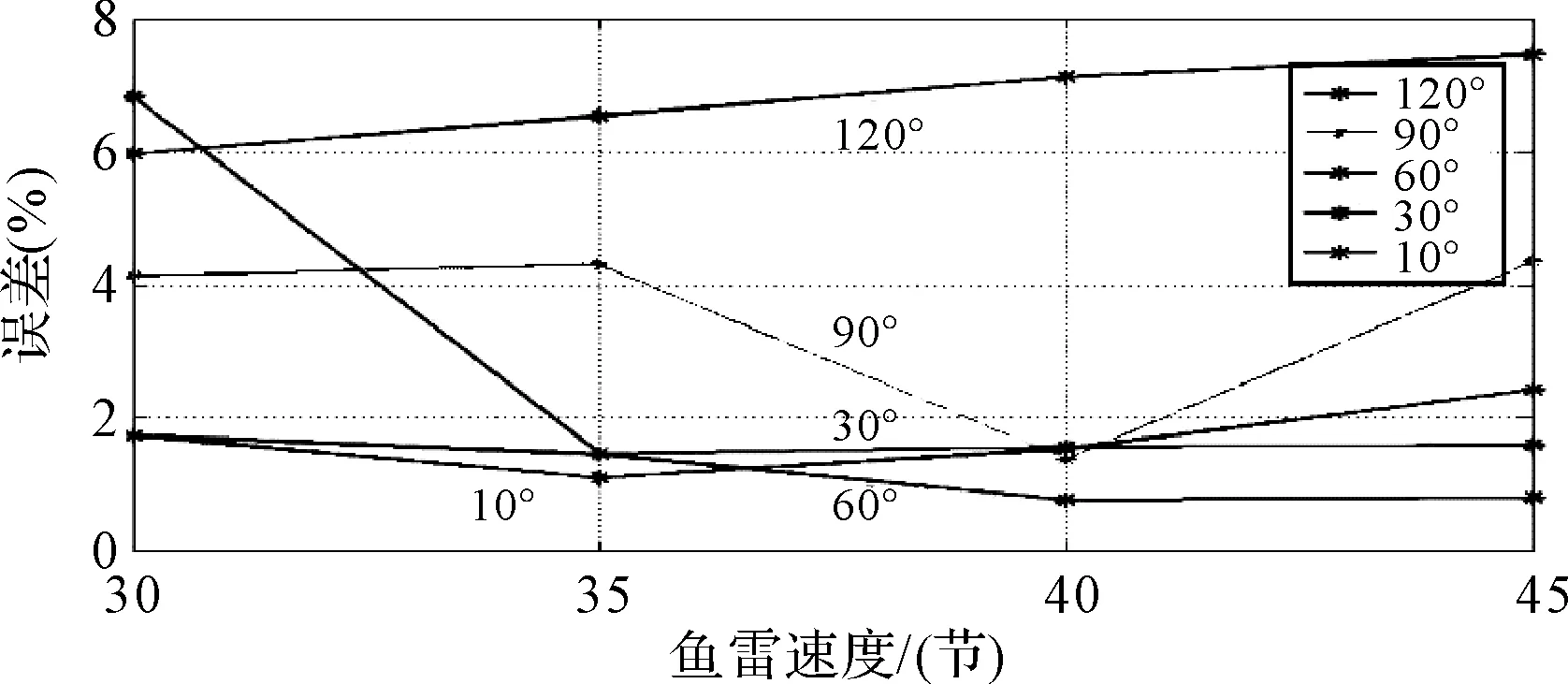
圖5 實際D1=40鏈,繪算值與實際值之間的相對誤差曲線圖
圖6 實際D1=30鏈,繪算值與實際值之間的相對誤差曲線圖
2) 我舷角120°態勢下背著轉向時,相對誤差隨著VT的增大而單調增大,且隨著D1的減小而單調減小;且與其他態勢概略相比,在我舷角120°、實際距離D1為40鏈以上態勢時,其相對誤差基本最大。
3) 與我舷角120°態勢相比,其余態勢情況下基本不成線性變化,但其最大相對繪算誤差9.7%,平均相對繪算誤差7.35%,滿足了我艦艇實際確定來襲魚雷距離相對誤差不超過10%的需要[11],因此,我艦艇在機動規避來襲魚雷時采用“快速確定來襲魚雷距離”方法是可行的。
6 結語
本文從滿足艦艇“快速準確地確定來襲魚雷距離”實際需求出發,研究了一種隱蔽快速確定魚雷距離的方法,為艦艇合理采取對抗措施決策提供依據。雖然,本文也通過相應繪算比較分析,證明了此方法在一定態勢下是確實可行的,但只是概略的以70°[10]作為轉向的劃分界限,實際上關于在不同態勢下我艦艇何時轉向、向哪方向轉向以及轉向多大角度最有利于繪算和防御等問題,還有待進一步精確細化分析。
[1] 趙正業.艦艇火控系統原理[M].北京:國防工業出版社,2003.
[2] 夏佩倫.純方位目標跟蹤系統分析[J].艦船論證參考,1991(1):57-64.
[3] 賈躍,宋保維,趙向濤,等.水面艦艇對聲自導魚雷防御機動方法研究[J].火力與指揮控制,2009,1:25-46.
[4] Stuart Henson. Torpedo Countermeasures[J]. Naval Forces,2001,5.
[5] 王樹宗.潛用自導/線導魚雷直航射擊功能的戰術意義[J].艦船科學技術,2005(1):52-54.
[6] 宗方勇,曹震卿,賈躍.魚雷航速對艦艇魚雷報警距離的影響分析[J].魚雷技術,2011,19(4):260-262.
[7] 王桂芹,劉海光,賈瑞鳳.聲制導魚雷反水聲對抗技術綜述[J].艦船電子對抗,2009,29(3):150-153.
[8] National Imagery and Mapping Agency. Maneuvering board manual fourth edition[J]. National Imagery And Mapping Agency, Bethesda, Maryland. 1984:XV-XIX.
[9] 曹震卿,賈躍.魚雷航速對潛艇魚雷報警距離的影響分析[J].艦船科學技術,2011,19(4):260-262.
[10] 王新華,高洪林.艦船反魚雷技術[J].艦船科學技術,2011,33(9):86-90.
Quick Determination Method the Distance of Incoming Torpedo
WU Hanyun1ZHU Qinghao1ZANG Jiangtao2
(1. Navy Submarine Academy, Qingdao 266000)(2. No. 92196 Troops of PLA, Qingdao 266000)
Under the situation by incoming torpedo hitting closed, the attacked ships can take advantage of the passive bearing, combine with the avoid maneuvering of naval vessels, then the “quickly determine the distance of incoming torpedo” approach is used to seclude and fast determine the distance of torpedo. And by comparing the relative error between the numerical value and the actual value, the feasibility of this method is verified.
passive bearing, avoid maneuvering, distance of incoming torpedo
TJ630
2016年9月16日,
2016年10月20日
吳漢云,男,碩士研究生,研究方向:海軍兵種戰術理論。朱清浩,男,副教授,研究方向:海軍兵種戰術理論。臧江濤,男,工程師,研究方向:潛艇攻防。
TJ630
10.3969/j.issn.1672-9730.2017.03.032
猜你喜歡
環球時報(2022-12-30)2022-12-30 15:15:00
鳳凰動漫(軍事大王)(2022年3期)2022-06-17 01:46:36
軍事文摘(2021年21期)2021-11-14 10:14:56
兒童故事畫報(2019年5期)2019-05-26 14:26:14
兵器知識(2017年10期)2017-10-19 19:31:38
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
軍事體育學報(2014年3期)2014-02-27 16:00:16
