行車輔助預警服務平臺研究與設計
2017-04-06 03:23:37蔡亮
赤峰學院學報·自然科學版 2017年5期
蔡亮
(蘭州文理學院數字媒體學院,甘肅蘭州730000)
行車輔助預警服務平臺研究與設計
蔡亮
(蘭州文理學院數字媒體學院,甘肅蘭州730000)
面對城市復雜的交通環境,如何設計一個既不增加使用成本,又能提高普通民用車輛行駛安全性的行車輔助預警服務平臺是本文研究的重點.該平臺利用移動智能通信設備,在LBS服務基礎上,采用B/S與C/S相結合的結構,不僅能夠提供線路規劃、信息推送等基礎服務,同時能夠通過圖像采集,運用機器視覺相關技術為用戶提供實時的前方行車環境預警提示,具有一定的實際應用價值.
行車預警;LBS;圖像處理;目標跟蹤
目前我國機動車保有量已達到2.79億輛,當中私家車所占比例達到72%.這使得道路交通狀況日益復雜,事故不斷頻發.為減少事故緩解交通壓力,相關機構雖采用了一些防護技術,但提高了購車費用.而我國私家車價格普遍偏低,配置簡化,三輪民用車甚至沒有安全防護.因此如何提高行駛安全性又不增加成本,同時降低事故發生率呢?智能移動通信設備的使用為我們找到了解決辦法.據統計預測,我國2018年手機保有量會達到12.2億臺.因此利用其構建一個能實時監控前方行車環境、提高駕駛人安全意識、減少事故發生、降低使用成本的行車輔助預警服務平臺就顯得日益重要.
1 安全防護技術現狀
現有安全防護技術主要分三個方面:
(1)基本安全防護,是車輛出廠時的基本配置,如安全帶、氣囊、防撞梁、發動機下沉技術等.這些防護措施僅在交通事故發生時對車內人員安全起到一定保護作用,但無法提前預防,且不能預測交通狀況.
(2)輔助駕駛系統,早期有ABS、穩定控制等,能提升行駛中車身安全性,但僅在事故發生時保護車內人員安全;后期有通過傳感器感知的輔助系統,如全景攝像、自適應巡航、上坡輔助及并線輔助等[1],但這些系統需安裝大量電子設備模塊和PC模型,各模塊間相互獨立、集成度低、功能重復,同時增加了制造成本.
(3)無安全措施.目前還存在著大量三輪機動車、摩托車、電動電瓶車等,這些車輛一般無安全輔助系統,甚至沒有安全防護措施,發生事故往往更嚴重.
因此需要一個符合我國交通狀況,以駕駛人為服務主體,不受限于車輛類型并能對其前方行車環境預警的服務平臺來彌補其他系統的不足.
2 技術分析
2.1 LBS技術
LBS即定位服務,是移動設備通過移動網絡和其當前位置來獲取附加信息的一組信息服務[2].該技術能有效降低成本、提高效益,同時能獲取大量交通數據信息.LBS服務系統體系架構見圖1:
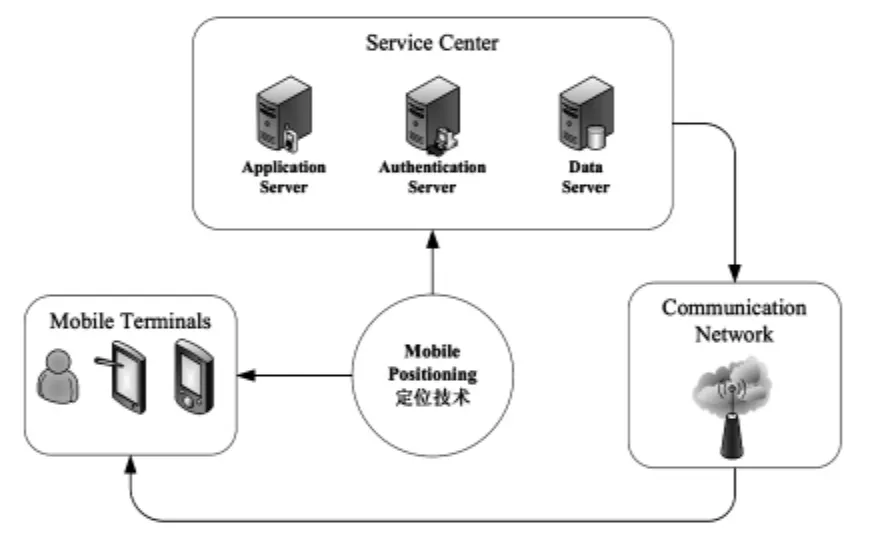
圖1 LBS服務系統體系架構圖
2.2 機器視覺
2.2.1 圖像處理
通過移動終端所采集的道路圖像十分復雜,需快速去除其中干擾信息,處理技術主要有:
(1)彩色空間轉化
所采集圖像多為RGB格式,使用前須轉化成CIELab.轉化分兩步,先由線性變換轉化到XYZ,再轉化到CIELab.取值范圍L為[1,100],均為[-128,127].公式如下:


X0=95.04,Y0=100.00,Z0=108.255為標準參考白光,根據公式1帶入RGB值后即得到相應CIELab值.
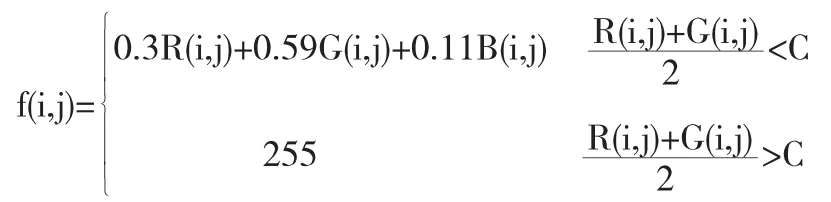
(2)圖像灰度化、降噪及增強
灰度化處理時分量法圖像偏深、最大值法圖像偏淺、平均值法圖像效果較差,而加權平均法通過權值修正后,效果更符合人類視覺灰度值[4].因此在其基礎上結合彩色通道提取法能夠增強圖像效果,公式如下:
降噪方法有均值和中值濾波法,前者能使噪聲得到衰減或消除,但也使圖像模糊,其程度隨所選領域半徑變大逐漸加深,雖可用閾值控制,但閾值大小不易控制[5];因此采用后者,其公式為:f(x,y)=med{Sf(x,y)},Sf(x,y)為像素的領域.處理流程見圖2:

圖2 中值濾波處理流程
增強方法有空間域和頻域方法,通過增強對比度、增強邊緣提高清晰度.增強對比度主要有基于直方圖的錐形拉伸、均衡化、匹配等;邊緣檢測主要通過微分算子卷積完成,常見算子有Sobel、Roberts、Prewitt等.
2.2.2 運動目標檢測與跟蹤
檢測主要分基于圖像差分和基于光流場兩種,前者又分為幀間差分和背景差分[6].背景差分需構建不含運動目標的基礎圖像,多用于固定監控設備;幀間差分動態環境自適應性強、檢測目標快,應用范圍廣.跟蹤方法有基于幾何亮度特征、光流場、頻域等.其中光流場對于有背景運動或運動鏡頭拍攝目標進行檢測跟蹤有很好效果.常見光流法有Horn&Schunck、Lucas&Kanade等.
3 系統設計
3.1 總體結構設計
行車輔助預警服務平臺采用B/S與C/S結構相結合,主要由移動客戶端服務、圖像采集分析處理、后臺服務管理及數據分類管理四大部分構成,見圖3:

圖3 行車輔助預警服務平臺結構
3.2 功能模塊分析
行車輔助預警服務平臺除常見線路規劃、信息推送等功能外,主要功能是為用戶提供前方信號燈安全提醒、用戶車輛行為安全提示及前方車輛行為預測提醒等安全服務.平臺分為移動客戶端服務和后臺服務管理.
(1)移動客戶端服務主要分為用戶注冊、路線導航、數據處理、語音播報提醒及信息推送等.數據處理模塊主要實現數據上傳下載,上傳為移動客戶端實時數據,包含位置、速度、采集的圖像及視頻等;下載包含信號燈指示提醒、行為預測結果、系統更新等信息.語音播報提醒主要實現將各種安全提示信息通過語音形式告知用戶.信息推送主要實現周邊餐飲及住宿預訂、團購及廣告發布等.

圖4 移動客戶端服務功能模塊
(2)后臺服務管理主要分為交通信息管理、業務管理及系統維護.交通信息管理主要對應移動客戶端所上傳數據的分類、處理、存儲、查詢以及相應的安全信息發布、管理,還能對用戶上傳交通事故情況向其他用戶發布來提醒提前安排路線等.業務管理主要提供周邊信息登記、發布,餐廳、酒店信息發布及訂單處理,特惠團購、增值業務以及廣告業務與發布.系統維護主要負責不同用戶權限及數據維護等.
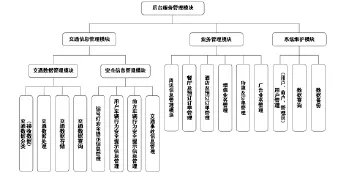
圖5 后臺服務管理模塊
4 模塊設計研究
4.1 路線規劃功能
線路規劃其主要功能是在電子定位地圖的基礎上,為用戶提供車輛行駛路線規劃功能.模塊基于百度API地圖SDK,通過GPS獲取移動終端經緯度信息來定位或由用戶給出出發點、目的地信息,來確定用戶所需線路.在建立路線規劃mSearch=RoutePlanSearch.newInstance()的同時,調用LocationClient類,使registerLocationListener()獲得監聽數據.由于事件監聽器涵蓋多個接口函數,而根據設計需要,選用onGetDrivingRouteResult(),即自駕路線.當選定目的地enN-ode后便可根據監聽的位置和目的地進行線路規劃.代碼如下:

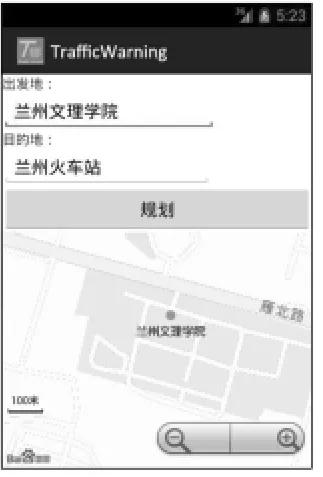
圖6 線路規劃功能設計圖一

圖7 線路規劃功能設計圖二
4.2 車輛行為跟蹤功能
車輛行為跟蹤主要功能是完成前方車輛運動檢測,為用戶提供車輛行為預警.模塊功能基于MATLAB通過獲取移動終端視頻幀并將其轉化為相應圖片,調用vision.OpticalFlow()轉化為灰度圖以計算光流場,經幅值、閾值、分割后獲得二值圖,再運用形態學濾波、腐蝕、關閉對分割后圖形進行處理,調用vision.BlobAnalysis()計算位置、面積.同時結合幀間差法,運用幀間特征與MeanShift算法相結合以提高檢測效果、加強定位準確性,獲取移動軌跡來判斷其運動傾向.同時使用vision.ForegroundDetectord()對象,以彌補光流法缺陷.

圖8 跟蹤捕捉圖一

圖9 跟蹤捕捉圖二
圖10 跟蹤捕捉軌跡圖
5 結語
行車輔助預警服務平臺不僅能提供線路規劃、信息推送等基礎性服務,同時能提供實時前方行車環境預警提示,及時告知駕駛人避免事故發生.目前該平臺部分功能已逐步完成,但仍有一些需進一步補充和完善,特別在復雜環境下穩定跟蹤及車輛行為判定上,還有待更進一步提高,今后考慮引入尺度不變特征及模板匹配,結合圖像數據挖掘技術,在所獲取圖像數據不斷累積的情況下降低目標跟蹤不穩定性,提高實時性、準確性及處理速度.相信該平臺能提供更安全的行車環境,使用戶能更便捷獲取交通安全信息.
〔1〕張翔.2014年汽車ADAS技術的最新進展[J].汽車電器. 2014,(8):4-7.
〔2〕郭瑞亮.基于移動終端的位置服務(LBS)系統的研究與實現[D].哈爾濱:哈爾濱工程大學,2013.
〔3〕肖若榮.基于機器視覺的交通標志識別關鍵技術研究[D].長沙:中南大學,2013.
〔4〕林廣宇.基于嵌入式技術的車載圖像監控系統研究[D].西安:長安大學,2009.
〔5〕萬洪林,彭玉華,郭銳.基于方向的自適應多級中值濾波[J].通信學報,2006(4):119-123.
〔6〕季鳴,王紅茹,童偉.基于改進差分和光流的新型運動目標檢測方法[J].計算機系統應用,2015(10):111-115.
〔7〕Ahn Byungtae,Han,Yudeog Kweon,et al.Real-time facial landmarks tracking using active shape model and LK optical flow.International conference on ubiquitous robots and ambient intelligence.2012,(1):541-543.
〔8〕Cruz-Mota,Javier,Bogdanova,Iva,etal.ScaleInvariant Feature Transform on the Sphere:Theory and Applications[J].International Journal of Computer Vision,2012,98 (2):217-241.
〔9〕江濟良,屠大維,許超,陳勇.復雜光流場運動分析與特征提取[J].電子測量與儀器學報,2011(3):285-290.
〔10〕徐麗珍,何耀平,孫霖.基于智能手機的人行橫道紅綠燈自動識別[J].計算機工程與應用,2010(23):219-222.
〔11〕張錚.精通Matlab數字圖像處理與識別[M].北京:人民郵電出版,2013.
〔12〕王江峰,陳天華.基于行為視覺的交通肇事現場檢測模型仿真[J].計算機仿真,2015,(8):195-198.
TP311
:A
:1673-260X(2017)03-0031-03
2016-12-12
甘肅省自然科學基金項目資助(1508RJZA076)
猜你喜歡
今日農業(2019年12期)2019-08-15 00:56:32
今日農業(2019年10期)2019-01-04 04:28:15
今日農業(2019年16期)2019-01-03 11:39:20
商周刊(2017年9期)2017-08-22 02:57:56
中華手工(2017年2期)2017-06-06 23:00:31
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年6期)2016-06-29 09:18:54
商用汽車(2016年4期)2016-05-09 01:23:12
創業家(2015年5期)2015-02-27 07:53:25
中外會展(2014年4期)2014-11-27 07:46:46
