細數專用車智能化的智能之處
2017-04-05 05:08:16襄樊南車專用汽車股份有限公司宋喜秀
專用汽車 2017年1期
襄樊南車專用汽車股份有限公司 宋喜秀
細數專用車智能化的智能之處
襄樊南車專用汽車股份有限公司 宋喜秀
作業類專用車,正逐步向智能型升級:遙控器發指令,與機械手相呼應。智能化專用車,恰似一處好風景。
2016年7月7日晚,在美國得克薩斯州達拉斯市舉行的反警察暴力執法和種族歧視抗議活動中,一名狙擊手向維持秩序的警方開槍,造成警方5死7傷,另有兩名平民受傷。雙方對峙至8日凌晨,警方出動一個攜帶炸彈的機器人(如圖1),逐步接近并成功炸死了嫌疑人邁卡?約翰遜。機器人消滅嫌疑人,可謂出其不意,令人稱奇。但從作業類專用汽車的角度解析機器人構造原理,炸彈機器人只不過是“底盤+作業裝置+智能控制系統”的一種智能汽車,諸如此類的智能型專用汽車有隨車起重機、高空消防車、混凝土泵車、快速裝卸機器人等,比比皆是。
人工操縱的普通型專用車,升級為智能型專用汽車的前提條件是:底盤平臺化、作業電氣化和指令智能化。
底盤平臺化
底盤平臺化是汽車智能化作業的技術基礎。因為底盤不僅是汽車履行走行功能的載體,同時又是汽車發揮作業功能的平臺,所以,底盤必須具有可靠的越野性能、穩固的基礎功能和必要的升降、旋轉等多種平臺功能。底盤平臺化有以下三種技術途徑。
首先是履帶式車橋平臺(圖2)。履帶式車橋平臺的“4輪1帶”構造,功能強大,配置巧妙——與地面接觸的履帶1、支持履帶傳動的支重輪6是車輛承重功能的堅強載體;驅動輪2、張緊輪4是整車傳動驅動系統的力量源泉;導向輪5則把履帶鋪設到地面,引領機架3沿履帶軌道行駛。


履帶式車橋平臺動力傳遞可靠,與地面的接觸面積大, 所以越來越多的重型專用車以及一些中輕型專用作業裝備,都采用了履帶式行走系統。當然,在履帶式行走系統中,前橋后橋不再單獨存在,而是復合形成了一個整體式的車橋平臺。
其次是輪胎式驅動模式+液壓支腿系統。輪胎式驅動有力、轉向靈活,在停車作業時,只要加裝一套液壓支腿系統,就能為上裝的專用作業裝置提供強大的底部支撐。
液壓支腿系統(圖3)是以車載蓄電池為電源,通過安裝支架將支腿固定在汽車大梁的合適位置,使用時支腿向下伸出觸地,將車身頂起,使車輛的大部分重量由支腿支撐,從而保持車體的平穩,減輕車輛彈簧鋼板的負載。使用完畢后,支腿座向上收起,保持足夠的離地高度,以保證行車及設備安全。一般的車用液壓支腿,包括一個位于車架左右縱梁上的油缸缸筒固定架、雙作用式液壓支腿油缸及支腿座,液壓油缸的缸體與缸筒固定架連接,活塞桿與支腿座鉸接。車用支腿油缸的設計要求是:自鎖可靠、收放自如。
在圖3中,兩條液壓支腿由三位四通手動換向閥控制其伸出和縮回動作。布置在駕駛室的M型三位四通換向閥具有伸、縮換向和中位靜止不動三種控制功能,且工作油路采用并聯方式,保證兩條支腿步調一致且收放自如。
液壓支腿支撐作業時,換向閥處于出油位置:液壓油長驅直入活塞腔,活塞桿腔的液壓油通過換向閥回流至油箱,活塞受壓下移,活塞桿向下伸長,將車身抬高到合適位置后,換向閥回到中間的進出油口封閉位置。座板面積是活塞桿橫截面積N多倍的支腿座,進一步增強了液壓支腿在支承面上的負載能力。
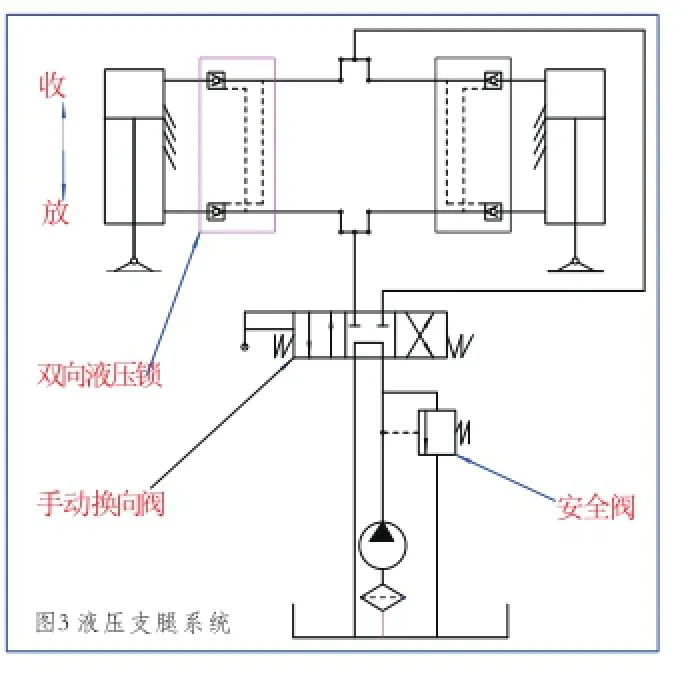
液壓支腿收腿作業時,換向閥處于回油位置:支腿油缸的回油系統開啟,活塞桿向上收縮,收縮到初始的安裝位置后,換向閥恢復到中間位置,支腿油缸的液壓油停止流動。
液壓支腿伸出去后能否穩定支撐,又是否能夠自如地收縮并穩固在初始的安裝位置,分別關系到車用停放和行駛期間的安全可靠性。因此,每個液壓缸均設計有雙向鎖緊回路,使進油與回油連鎖聯控。
(1)壓力解鎖:支腿伸縮作業時,活塞腔、活塞桿腔的單向閥同時打開,油缸油路按設計的程序進油出油。
(2)無壓自鎖:換向閥處于中停位置時,支腿油缸的進出油通道處于無壓自鎖的封閉狀態,戛然而止的液力傳遞可以避免支腿在行車過程中自行滑落。
(3)雙向互鎖:進油壓力不足時,出油通道也被可靠地鎖住,能夠有效防止在起重作業過程發生“軟腿”現象。
支腿缸可將數10噸車身輕松頂起,除了油缸、油閥、油泵等液壓元件自身的精密構造,液壓系統的壓力來源不容忽視。液壓油缸的作用力F(N)、活塞面積S(mm2)與液壓系統壓力p(MPa)的關系為:F=p﹒S。
在相同活塞面積S條件下,液壓系統壓力p越高,液壓油缸的作用力F越大。液壓系統按壓力等級可分為中壓、高壓、中高壓等。足夠的液壓系統壓力是液壓油缸的動力基礎。
對于雙作用式支腿缸來說,由于活塞腔面積大于活塞桿腔面積,而活塞移動速度與油壓面積成反比,所以活塞作往復運動的速度也有差別。系統壓力p值越高,要求的活塞桿徑也就越大,對應的往復運動的速比越大。液壓系統壓力等級及對應的速比見表1。
隨車起重機、高空消防車、混凝土泵車等作業類車輛的支腿,經歷了從機械式到機械液壓組合式,再到全液壓式的創新和轉型。支腿油缸實現了司乘人員對支腿收放動作的遠程控制,提高了停車作業效率,體現了液壓操作系統的先進性。
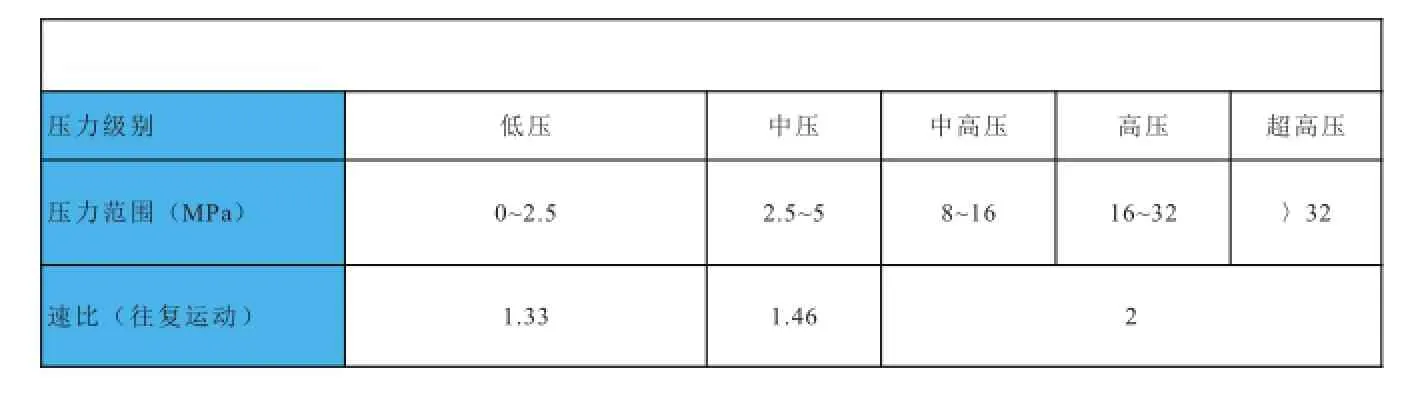
表1 液壓系統壓力等級表
最后是多個走行裝置的復合模式。事實上,輪胎式與履帶式各有千秋,簡單的平坦路面選用輪胎式,純粹的坎坷路況選用履帶式,復雜的作業環境則可選用多個平臺的復合體。圖1所示的炸彈機器人的底盤是輪胎式驅動模式與履帶式車橋平臺兩種走行裝置的復合體;圖8所示的快速裝卸機器人的底盤則是兩個移動式升降平臺的復合體。
作業電氣化
作業電氣化是專用作業裝置實現智能控制的物理學基礎。隨車起重機、高空消防車、混凝土泵車、快速裝卸機器人等智能汽車的專用作業裝置,可滿足在各種空間實現起重物、打水炮、泵送混凝土、裝卸碼放貨物等的作業功能:首先要選用一種高性能的臂架結構,依靠相互串聯起來的基本臂、二節臂、三節臂直至由末節臂來定位作業;每一節臂架之間依靠雙作用液壓油缸的伸縮動作進行變位或變幅;液壓油缸則由高壓油泵驅動;高壓油泵又由電機牽引,從而實現臂架作業的電氣化控制。
隨車起重機,又稱隨車吊,是指固定安裝在載貨汽車底盤上,與載貨汽車組成隨車起重運輸車,在一定范圍內通過液壓舉升及伸縮系統來實現貨物的升降、回轉、吊運的起重設備,屬于物料搬運機械。根據吊臂結構特點,隨車起重機可分為折臂式、直臂式兩種基本形式。折臂式隨車起重機(如圖4)具有靈活高效、結構緊湊等突出優勢,是智能控制模式的主要車型。
折臂式吊臂機構主要由基臂、內動臂、外動臂等3節臂架及控制內、外動臂轉角及外動臂伸長量的3支液壓油缸組成。特別適合倉儲調運、樹木吊裝、道路清障、設施搭建等搬、運一體化作業。
隨著抓具、夾具、燈具、吊籃、螺旋鉆、拔樁器、輪胎裝卸機械手、高空作業平臺等專門作業裝置的出現,隨車起重運輸車的作業范圍不再局限于搬運功能,其發展潛力和細分市場日益廣闊。
由于隨車吊是具有起重安全風險的特殊車輛,所以,隨車操作人員應接受生產廠家的指導、培訓,對整車的結構、性能有足夠的了解,并從廠家獲得一定的隨車吊操作及維護經驗后方可操作機器。
舉高噴射消防車,簡稱高噴車,由折疊伸縮臂結構、電動遙控消防炮、罐體及二類底盤組成。高噴車的臂架分為基本臂、二節臂、三節臂、四節臂等多節伸縮臂,消防水管固定在伸縮臂的一側,與伸縮臂一起伸縮舉高。臂架末端安裝電子遙控消防炮,消防隊員通過操作遙控器遙控消防炮,在高空中從多個角度靈活地噴霧、噴水或者噴射泡沫撲救火災。

混凝土泵車臂架系統主要由多節混凝土泵車臂架、連桿、油缸、連接件鉸接而成的可折疊和展開的平面四連桿機構組成,根據各混凝土泵車臂架間轉動方向和順序的不同,臂架有R形(圖7a)、Z形(或M形,圖7b)及綜合型(圖7c)等多種折疊形式。R形結構緊湊空間小,Z形收放迅速動作快,綜合型則兼而有之。三種折疊方式為不同生產商混合使用。
快速裝卸機器人以立體化貨架為對象,能夠滿足多種貨物的少量搬運需求。裝卸機器人是工業機器人的一種,具有高度自動化的操作和移動功能。2015年8月26日《日本經濟新聞》報道,日本日立制作所宣布已開發出一種可在物流倉庫內移動并自動裝卸和搬運貨物的新型機器人。
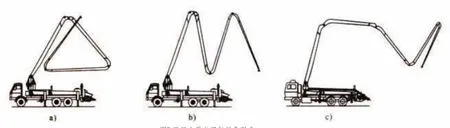
圖7 混凝土泵車臂架折疊形式
日立開發的這種新型機器人的構造,是在移動平板車上安裝兩個升降臺,然后分別裝上操作臂型的機器人。一條機械臂的頂端裝有吸附裝置,另一條頂端裝有兩根機械手指。移動平板車移動到指定貨架之后,自動調整升降臺高度,利用機械臂上安裝的攝像頭確認貨物,然后以符合其形狀和重量的方法進行搬運。
智能控制系統
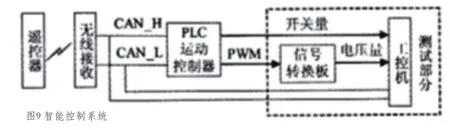
作業類專用汽車的智能控制系統,又稱智能臂架系統,一般由三個部分組成:遙控器及無線接收裝置、運動控制器(PLC)及測試平臺工控機系統。遙控器發出臂架啟動/停止、快速/慢速、鎖定/解鎖、展臂/收臂等操作指令,安裝在作業類專用汽車上的無線接收裝置將獲得的遠程指令轉發到CAN總線上,PLC運動控制器通過CAN總線接收到臂架末端的運動方向及速度數據后,將臂架末端的運動分解為各節臂的運動,使臂架按設定程序到達指定位置。測試平臺工控機系統接收PLC運動控制器的輸出數據后,模擬被控臂架,顯示當前各節臂架狀態,提供友好的人機界面,并反饋到CAN總線上。
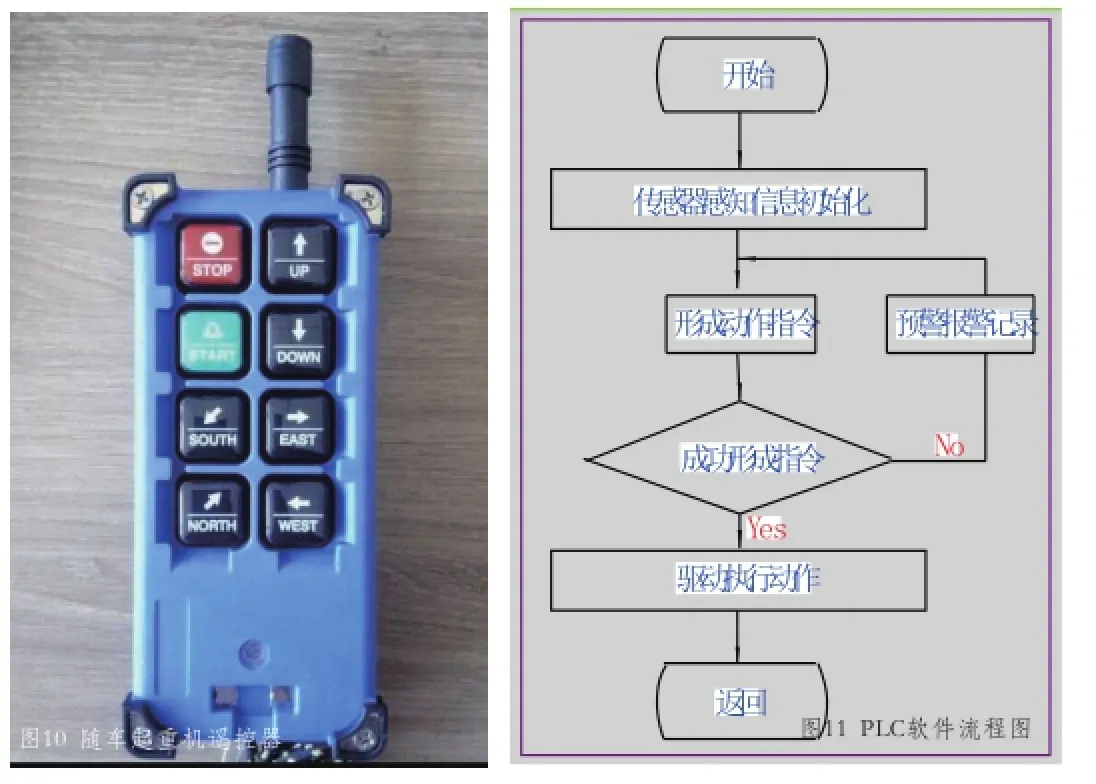
對于爆炸機器人來說,炸彈爆炸裝置是整個爆炸系統的終端,系統的前端則是掌握在警方手中的遠程控制按鈕。這個按鈕可以是鼠標、按鍵、感應器之類的任何一種電子開關。智能臂架系統一般采用遙控器(圖10)發射遙控指令。遙控器主要由單片機、控制鍵盤以及標準的串行無線通信發射器組成。
操作各種功能鍵向無線接收裝置發送指令,一鍵一功能,一按一指令,運動控制器通過對指令的運算分析,在確保系統安全和操作無誤后,向臂架電機發出正式指令;在超載等危險工況時,則會輸出預警報警信息,停止作業,并記錄危險數據。圖11是PLC運動控制器軟件的流程圖。運動控制器PLC軟件設計主要包括遙控指令和臂架數據的接收、臂架自動運行的算法處理及其安全保護。

有人憧憬人工智能的美好未來,也有人擔心機器邏輯的法制風險,還有人產生了被機器人淘汰的焦慮心理,歐盟議會甚至提出提案,要求機器人繳納社會保險。以汽車產業為例:車架焊接、車體裝配、車身噴漆等高溫度、高精度、高污染工序的人工作業,已經被機器人取而代之,機器人還有什么不能干?
谷歌CEO桑達?皮查伊(Sundar Pichai)曾經在阿爾法圍棋(Al-phaGo)“人機大戰”現場表示:“世界上真正的挑戰不是‘人類對機器’,而是人類利用機器與那些全球性難題之間的對決。” 如果我們把專用汽車視為“貨物運輸機器人”或“特種作業機器人”,我們應該注意到,代替人類“當牛做馬”的專用汽車,在淘汰瓦工、泥匠、馬車夫等傳統職業的同時,還帶來了更加龐大、更有發展潛力的汽車產業及眾多附加產業。
事實正是如此,智能化專用車,無論是控制方法,還是控制效果,都與炸彈機器人一樣靈活、可靠、穩定、準確;智能臂架系統產業鏈的開發、生產、裝配、控制、維修等環節也都蘊藏著無限商機與魅力。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
故事大王(2016年7期)2016-09-22 17:30:08