基于運動生物力學的人體運動建模方法
2017-04-01 23:35:44祝楊
現代電子技術 2017年5期
祝楊

摘 要: 針對當前關鍵幀運動數據捕獲方法進行人體運動建模準確度低的問題,提出基于運動生物力學的人體運動建模方法。首先進行人體運動的生物力學數據分析和插值重建;然后構建運動狀態方程進行人體運動建模關鍵數據的捕獲和特征分析;最后進行仿真實驗,結果表明,該方法提高了人體運動分析的準確率,對運動步行、跳躍、側手翻等人體運動的重構能力好,結果具有一定的合理性。
關鍵詞: 運動生物力學; 人體運動; 插值重建; 建模方法
中圖分類號: TN98?34; TP391 文獻標識碼: A 文章編號: 1004?373X(2017)05?0054?04
Abstract: Since the current key frame motion data acquisition method has low accuracy for human body motion modeling, a human body motion modeling method based on sports biomechanics is proposed. The biomechanical data analysis and interpolation reconstruction of the human body motion were carried out. And then the motion state equation was constructed to perform the capture and feature analysis of the key data of the human body modeling. The modeling method was conducted with simulation experiment. The results show that the modeling method has improved the accuracy of the human motion analysis, good reconstruction ability for human body motion such as walking, jumping and cartwheel, and the result has a certain rationality.
Keywords: sports biomechanics; human body movement; interpolation reconstruction; modeling method
0 引 言
人體運動是一個復雜的生物力學系統,對人體運動的建模分析將在指導體育運動訓練、計算機游戲開發、虛擬現實仿真、影視特效表演等方面都具有重要的應用價值。對人體運動的建模過程就是對人體運動力學信息進行數據分析和提取的過程,通過捕獲人體的運動生物力學數據,進行特征壓縮、信息檢索和重構,實現對人體運動過程的合成和編輯,達到人體運動骨骼重構的目的,研究人體運動建模方法,在指導運動康復訓練方面也有重要意義[1]。
傳統方法中,對人體運動建模的方法主要采用關鍵幀信息提取方法,結合運動圖像分析實現人體運動重構[2]。比如,采用曲線簡化方法把人體運動過程看作是一條運動軌跡曲線的關鍵特征點跟蹤過程,人體運動的骨段曲線是高維空間中的一個行為軌跡。采用分層曲線方法進行行為重建[3?4],取得了一定的成果,但是該方法需要設定關鍵幀之間的分辨閾值,在存在較大的運動特征擾動干擾下,對人體運動重建的誤差較大,人體運動建模的效果較差[5]。
針對當前人體運動建模準確度低的問題,提出基于運動生物力學的人體運動建模方法。仿真實驗結果表明,本文提高了人體運動分析的準確率,對步行、跳躍、側手翻等人體運動的重構能力好。
1 人體運動生物力學數據分析
1.1 人體運動生物力學數據的采集
常用的人體運動生物力學數據采集式有ASF/AMC (Acclaim Skeleton File/Acclaim Motion Capture data),BVH,HTR等,由于人體運動生物力學數據的非線性特性和隨機分布性[6],本文采用ASF/AMC的文件格式進行人體運動生物力學數據的表達,采用安裝在人體上的生物傳感器和振動傳感器進行信息采集,設在[k]時刻安裝于人體上生物傳感器的運動狀態信息輸出為[ωk=[ωxωyωz]T,]采用加速度計和磁力計計算人體位姿信息的輸出為[bak=[axayaz]T,]運動姿態角輸出為[bmk=[mxmymz]T。]設參考坐標系為大地坐標系(不考慮磁偏角),則在重力矢量和地磁場矢量的作用下,在人體的生物運動高維空間中,通過精確的姿態估計,得到人體運動的力學測量數據分別為[ra=[00-g]T,][rm=][[hcosα0-hsinα]T,]其中[g]為重力加速度絕對值,[h]和[α]分別為傳感器數據隨著地磁傾角的隨動誤差。
當人體在做步行、跳躍、側手翻等運動時,得到一個封閉人體運動生物力學的空間運動方程組為:
式中:[θ]為人體運動的跳躍傾角;[?]為人體在做跑步運動時的俯仰前傾角;[α]為人體在側手翻運動中的垂直偏移;[x,][y]為人體運動中姿態的水平和垂直位置;[ωx,][ωy]為非加速運動狀態時在坐標系[Ox1,][Oy1]軸的力矩;[δz]為任意姿態時的身體偏角;[e1]為縱向運動的控制誤差;[m]為人體的質量;[X,Y]為人體在跑步運動和跳躍運動中的空氣阻力、升力、側向力;[Mz]為俯仰力矩;[Jz]為人體運動中隨著坐標系變換的轉動慣量;[Jxy]為人體運動空間模型對速度坐標系[Oz1]的轉動慣量。
通過上述構建的人體運動空間分布特征方程,進行人體運動生物力學數據捕獲,得到步行、跳躍、側手翻運動下的生物力學數據捕獲特征方程描述為:
步行:
通過以上原理,進行人體運動生物力學數據的采集和特征分析。
1.2 人體運動的插值重建
根據上述人體運動方程和數據捕獲結果,進行人體運動的插值重建,得到全局搜索下人體運動的生物力學數據觀測方程:
式中:[k]為采樣時刻;[qk]為[k]時刻人體運動捕獲數據在載體坐標系中的姿態分解四元數;[Φk]為姿態轉換陣,通過[ωk]計算出兩個相鄰關鍵幀的運動數據;[Hk+1]為觀測陣,通過[k]時刻得到體運動狀態空間的遞歸值[bak+1]和[ra]或者[bmk+1]和[rm];[εk]和[δbxk+1]分別為人體運動建模過程中的觀測擾動;[Ξk]為擾動系數矩陣,通過原始運動序列和重構運動方程得到牛頓力學系數[qk]。
在人體運動狀態方程重構中,采用姿態解算方法得到非線性運動姿態數據的表達方程:
為保證觀測方程線性,通過二次濾波得到人體運動生物力學的捕獲數據[bak+1]和[bmk+1,]由QUEST算法或者高斯牛頓迭代算法計算得出。讀取穿戴在人體身上的傳感器數據進行誤差分析,通過插值重建方法[7?8],在觀測空間中得到人體運動特征信息的卡爾曼方程:
若人體的姿態變換過程中力學分解具有非線性,采用四階龍格庫塔法求解人體姿態變換的力學分解過程為[qi(t1)=[w1,x1,][y1,z1],][qi(t2)=[w2,x2,][y2,z2]],上述分解過程表示為兩個單位四元數,[θ]為采樣骨骼點的夾角,表示為:
球面線性插值輸出的姿態變換信息能合理反應人體運動的生物力學信息,由此實現人體運動建模力學重構。
2.2 人體運動建模實現及質量評價
用重建誤差表示人體運動建模的約束指標。重建誤差為原始運動序列和重構運動序列的平均運動力學矢量度量。利用加速度計和磁力計計算含有[n]幀數據的原始運動片段[om,]以[om]的骨骼生物力學作為采樣點,采用運動數據插值擬合方法重建得到重建運動片段[rm。]考慮各肢體部位的速率之差,設[om,][rm]分別為原始運動序列和重構運動序列,其關節作用力矩的序列長度均為[n,]得到人體力學重構誤差定義為[9?10]:
式中:[Dp(om,rm)]描述人體運動過程中相對于世界坐標系的姿勢位置誤差;[Dv(om,rm)]表示關節速率之差;[u]為更新的步長。
根據前期的試驗可知,關節速率之差所占比例很小,所以本文設為1,由此得到人體運動建模的重構生物力學方程為:
3 實驗結果與分析
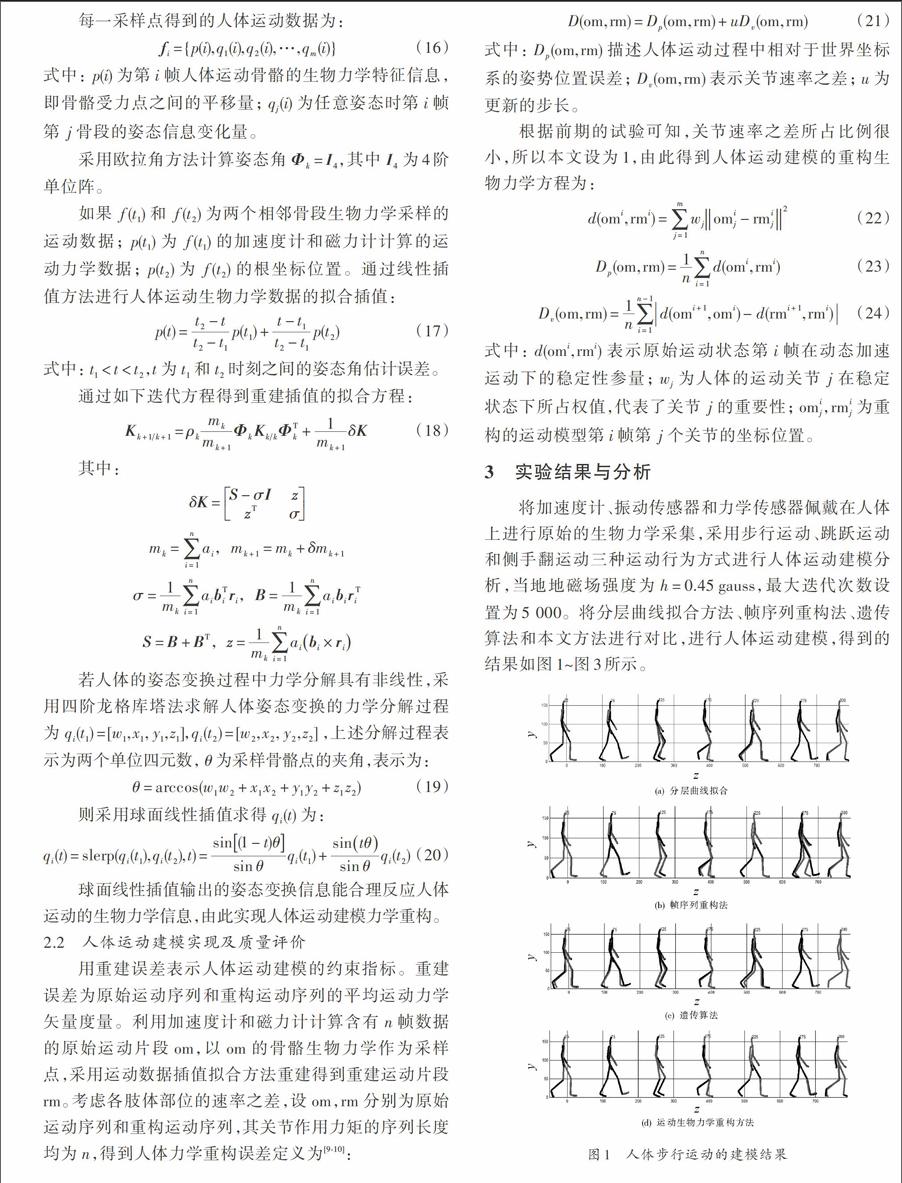
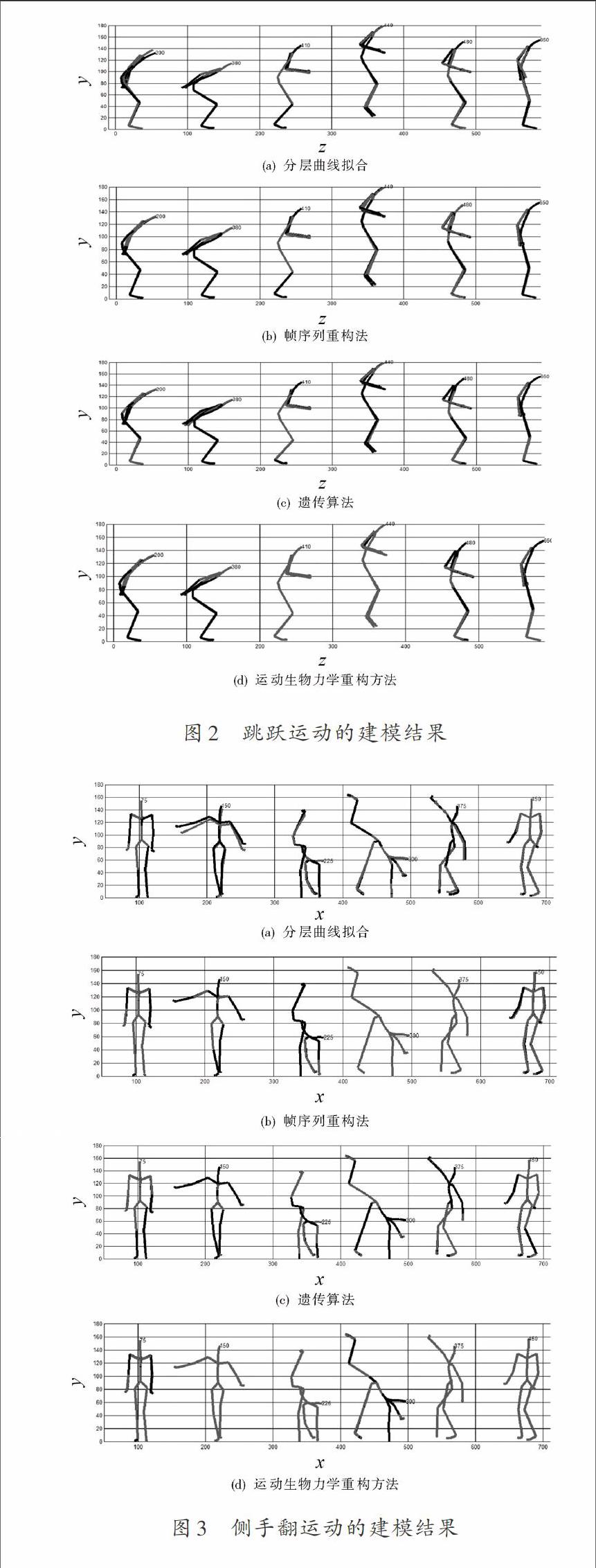
將加速度計、振動傳感器和力學傳感器佩戴在人體上進行原始的生物力學采集,采用步行運動、跳躍運動和側手翻運動三種運動行為方式進行人體運動建模分析,當地地磁場強度為[h=0.45 gauss,]最大迭代次數設置為5 000。將分層曲線擬合方法、幀序列重構法、遺傳算法和本文方法進行對比,進行人體運動建模,得到的結果如圖1~圖3所示。
由圖1~圖3得知,采用本文方法進行運動建模,能比較好地重構原始運動,本文方法能準確提取出邊界幀,使得原始運動和重構運動差別較小。
不同方法進行人體運動建模的重建誤差曲線如圖4所示。分析得出,本文進行人體運動建模的重建誤差遠遠低于傳統方法,得到最優重建誤差,表明本文方法進行人體運動建模具有合理性。
4 結 語
通過捕獲人體的運動生物力學數據,進行特征壓縮、信息檢索和重構,實現對人體運動過程的合成和編輯,達到人體運動重構的目的。本文提出基于運動生物力學的人體運動建模方法,仿真實驗的結果表明,本文方法提高了人體運動分析的準確率,可以對各種運動進行有效識別,具有廣泛的應用前景。
參考文獻
[1] 楊濤,肖俊,吳飛,等.基于分層曲線簡化的運動捕獲數據關鍵幀提取[J].計算機輔助設計與圖形學學報,2006,18(11):1691?1697.
[2] 朱登明,王兆其.基于運動序列分割的運動捕獲數據關鍵幀提取[J].計算機輔助設計與圖形學學報,2008,20(6):787?792.
[3] 陸興華,吳恩燊,黃冠華.基于Android的智能家居控制系統軟件設計研究[J].物聯網技術,2015,5(11):14?16.
[4] 黃朝,許鑫,劉敦歌,等.基于多傳感器的微弱磁異常信號提取方法研究[J].電子測量技術,2015,38(10):91?95.
[5] 周勇,甘新年,胡光波,等.魚雷制導控制系統多通道控制加權算法設計[J].現代電子技術,2014,37(19):14?17.
[6] 廖一寰,李道奎,唐國金.基于混合規劃策略的空間機械臂運動規劃研究[J].宇航學報,2011,32(1):98?103.
[7] 鄧剛鋒,黃先祥,高欽和,等.基于改進型遺傳算法的虛擬人上肢運動鏈逆運動學求解方法[J].計算機應用,2014,34(1):129?134.
[8] 柯文德,彭志平,蔡則蘇,等.仿人機器人相似性運動研究進展[J].計算機應用研究,2013,30(9): 2570?2575.
[9] 柯文德,彭志平,洪炳镕,等.基于運動相似性的仿人機器人上階梯行走研究[J].華中科技大學學報(自然科學版),2012,40(12):60?64.
[10] 陸興華,張曉軍.人員圖像跟蹤過程中多人交叉區域防丟失方法[J].計算機仿真,2014,31(9):243?246.
