一種面向《工業機器人》課程的聯合仿真平臺開發
2017-03-30 11:25:06馬文濤張霞陳仁祥董紹江陳
科技資訊 2016年31期
馬文濤++張霞++陳仁祥++董紹江++陳里里++錢蕾

(重慶交通大學機電與車輛工程學院 重慶 400074)
摘要:圍繞《工業機器人》課程教學過程中存在的幾個突出問題,研究開發了ADAMS/Simulink 聯合仿真平臺。利用 MATLAB/Simulink 軟件對機器人進行關節軌跡規劃和虛擬樣機的實時控制,利用 ADAMS 軟件對所建立的機器人模型進行動力學分析,有效地將軌跡規劃、動力學、和機器人控制等基礎知識進行了關聯,充分調動學生的積極性和創新性。
關鍵詞:工業機器人,ADAMS/Simulink,聯合仿真
中圖分類號:TH16 文獻標識碼:A 文章編號:1672-3791(2016)11(a)-0000-00
Development of a joint simulation platform forindustrial robotcourse
Abstract:The ADAMS / Simulink joint simulation platform is developed based on several prominent problems existing in the teaching process of the Industrial Rrobot. Using MATLAB/Simulink software to carry on the joint trajectory planning of robot and the real time control of the virtual prototype, the dynamic analysis of the robot model is built by using ADAMS software,The basic knowledge of trajectory planning, dynamics, and robot control is effectively related to the students' enthusiasm and creativity.
Keywords: industrial robot, ADAMS/Simulink,joint simulation
機器人學是一門高度交叉的前沿學科,是力學、機械學、設計學、電子學、信息論、控制論等許多交叉、融合的新興學科[1]。《工業機器人》是一門既具理論性又有較強實踐性的課程,主要學習機器人本體機構、數學建模、控制和編程等內容,對培養學生的創新思維起著重要作用。從近年來我院《工業機器人》課程改革的進程來看,仍然存在影響課程教學質量以及不適應新世紀人才培養戰略的問題,主要表現在以下幾個方面:一是內容抽象、理解困難;二是缺少貫穿各章節的課程主線;三是公式繁多、推導復雜;四是偏重理論學習、缺乏實驗條件。針對上述存在的問題,課程改革主要包括如下幾大部分:一是展示領域最新動態;二是將教學內容與國際接軌,以中文教材為主、全英文教材為輔的雙語授課模式;三是明確課程教學主線、提煉課程教學內容;四是結合機器人系統仿真案例分析,幫助學生對運動學、動力學方程、軌跡規劃和控制方式形成一個整體的認識。本文重點針對“偏重理論學習、缺乏實驗條件”的問題,研究開發了ADAMS/Simulink聯合仿真平臺,虛擬運動仿真與控制動畫演示極大地激發了學生的學習興趣,達到事半功倍的教學效果。
1 機械臂的軌跡規劃
設定單自由度機械臂繞旋轉軸做加速、勻速、和減速運動的作業任務要求,本節討論在關節空間中機器人運動的軌跡規劃和軌跡生成方法。
1.1作業任務要求
根據單自由度機械臂作業任務的要求,設定機械臂末端在 2.5s 內從起始點(0.2,0,0)繞z 軸逆時針旋轉一周回到起始點的運動軌跡。其中[0-0.5s]、[0.5-2.0s]、[2.0-2.5s]區間分別進行加速、勻速和減速運動。要求保證機械臂在運動過程中位移、速度、加速度連續。機械臂作業任務示意圖如圖 1所示。
1.2 軌跡生成方法
根據機械臂作業任務的要求, 采用五次多項式和一次函數過渡的線性插值方法, 計算出預期的關節運動軌跡,關節速度和關節加速度[2]。其中,加速和減速區間采用了五次多項式進行軌跡規劃,勻速區間采用了一次函數進行軌跡規劃。
其中設五次多項式函數
初始時刻 的軌跡記為 、終止時刻 的軌跡記為 ,初始時刻和終止時刻的速度、加速度的邊界條件為:
又根據中間路徑點位置、速度、加速度連續的約束條件,上述的邊界條件可以唯一的確定出五次多項式函數和一次函數。 其中, 加速、 勻速、 減速區間的軌跡函數分別由式(1)、(2)、 (3)決定。代入即得各速度區間函數為:
其中 。
2ADAMS/Simulink聯合仿真平臺
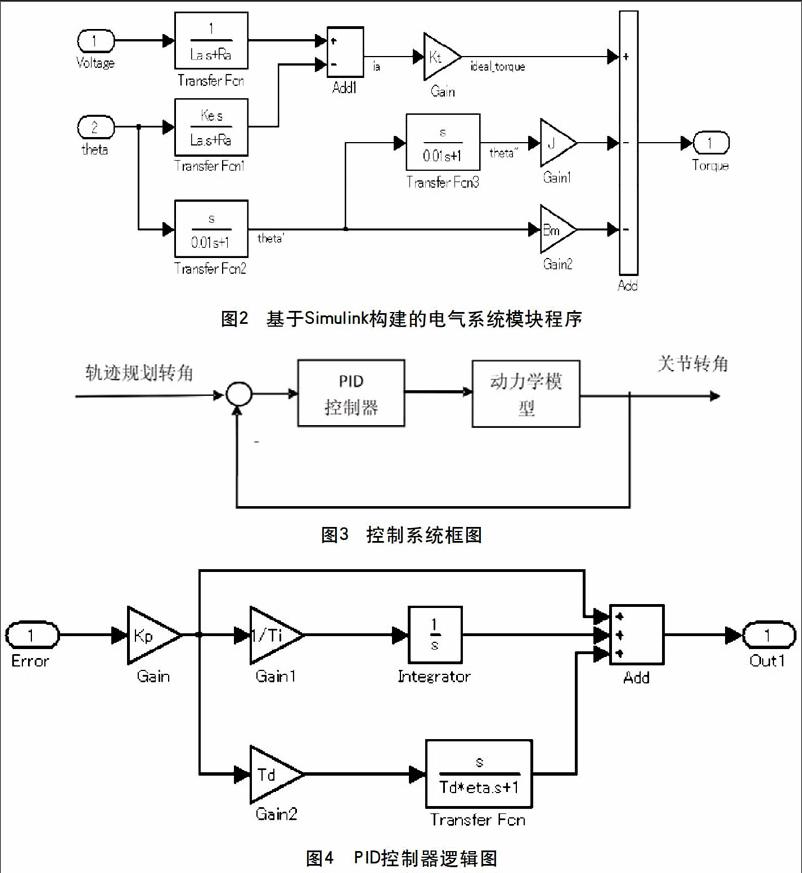
2.1機械臂電氣系統建模
電氣系統模型的數學表達式如下所示
其中輸入為 輸出為T。
根據以上數學表達式,在 Simulink 中構建了電氣系統模塊程序如圖2所示
值得說明的是,為了減小高頻信號的影響,在求取角速度和角加速度時采用了近似微分。 近似微分是將微分(s)乘以系數 得到的近似微分值,其中η是近似微分系數,因此,可以把看作為微分算子。
2.2PID控制器的模型建立
將實時關節角度與規劃關節角度進行比較,采用PID算法進行控制,控制結果轉化為關節的輸入轉矩并驅動關節運動,進而期望獲得更好的穩定性[4]。PID控制系統框圖如圖3所示。
PID 控制器的數學模型為:
(10)
對上式取拉氏變換得到式
(11)
寫出PID控制器的近似微分表達式
(12)
PID控制器的邏輯圖如下圖4所示。
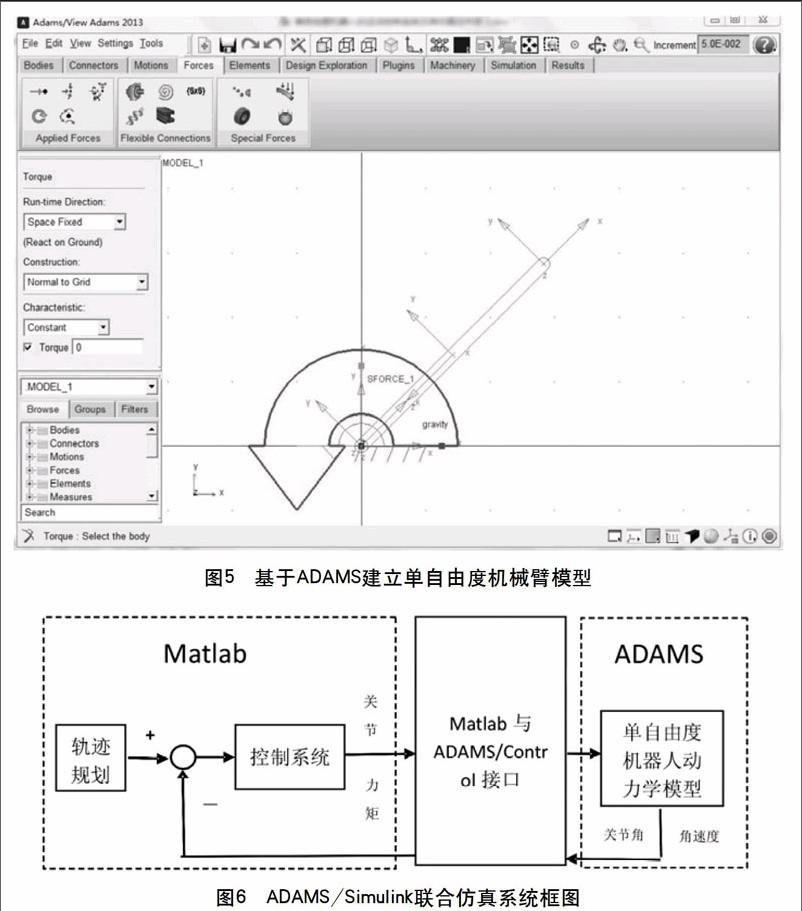
2.3ADAMS/Controls和MATLAB集成建模
在ADAMS軟件中建立單自由度機械臂模型,設置好模型物理量單位、連桿參數并添加約束。如圖5所示。
由于虛擬樣機分析軟件ADAMS只從機械學的角度提供機器人三維模型、進行運動學和動力學分析[5],控制系統的建立還是需借助MATLAB/Simulink工具箱完成,通過ADAMS與MATLAB兩者之間的接口 ADAMS/Conrtrols模塊,搭建了 ADAMS/Simulink 聯合仿真平臺如圖6所示。ADAMS 中的輸入量是關節力矩,輸出量是關節角和關節角速度。
3仿真結果
仿真結果如下圖7所示,顯示了關節目標軌跡和實際軌跡
結果表明, 在規定時間內機械臂的位移是連續的, 位移的范圍是 0~2π,符合作業任務的要求。實際軌跡與目標值吻合,證明 PID 控制器的有效性。
(2)機械臂關節角速度的變化如圖8所示。
圖8機械臂的速度圖
結果表明,機械臂在0-0.5s內角速度由0平滑穩定的上升到3 m/s ;在 0.5-2s 內機械臂的角速度達到一定穩定值 3m/s;在 2-2.5s 內角速度均勻平滑的降至 0, 保證了角度、速度和加速度的連續性。
綜上所述,根據所建立機械臂目標軌跡函數模型、機械臂電氣系統模型、PID控制系統模型和ADAMS/Control借口生成的ADAMS/Simulink聯合仿真,來檢測仿真結果。結果顯示,搭建的ADAMS和MATLAB聯合仿真控制系統,實現了機械臂旋轉運動的在線控制與調整,機械臂關節角變化與期望值吻合,能順利實現先加速、勻速、做減速運動的設計要求,達到了良好的跟蹤效果。
4、結語
本文重點針對《工業機器人》課程教學過程中存在的“偏重理論學習、缺乏實驗條件”的問題,研究開發了ADAMS/Simulink 聯合仿真平臺。利用 MATLAB/Simulink 軟件對機器人進行關節軌跡規劃和虛擬樣機的實時控制和 ADAMS 軟件對所建立的機器人模型進行動力學分析,有效地將軌跡規劃、動力學、和機器人控制等基礎知識進行了關聯,將枯燥乏味的理論知識和仿真系統相結合,不僅極大地激發了學生的學習興趣,而且充分調動學生的積極性和創新性,達到事半功倍的教學效果。
參考文獻
[1] 熊有倫,唐立新,丁漢,劉恩滄.機器人技術基礎[M].武漢:華中科技大學出版
社,2014
[2]蔡自興.機器人學[M].北京:清華大學出版社,2000
[3]黃忠霖,周向明.MATLAB控制系統及仿真[M].北京:國防工業出版社,2006
[4] 張德峰,周燕,.MATLAB基礎與工程應用[M].北京:清華大學出版社,2011
[5] 宋少云.ADAMS在機械設計中的應用[M].北京:國防工業出版社,2015
