基于智能調節優化的緊急車輛引導系統設計
2017-03-30 12:23:39劉晨希張澤鋆張晨苗啟廣
物聯網技術 2017年3期
劉晨希+張澤鋆+張晨+苗啟廣

摘 要:針對現實生活中經常出現的因緊急車輛受到道路堵塞而錯過最佳救援時機造成巨大損失的情況,文章基于物聯網、車聯網最新技術,提出了一種充分利用車路協同、交通誘導、GPS定位、智能優化和智能交通等技術提高目標車輛運行效率的方法,并設計了相應的系統。該方法根據實時道路信息,結合對目標車輛位置的實時監控,給出了基于最短路徑算法的實時最優道路選擇算法,為緊急車輛規劃最佳線路,再輔以紅綠燈時長的自動調整,通過多種方式誘導其他駕駛員避讓緊急車輛,在幾乎不影響其他車輛正常通行的情況下,顯著提高了目標車輛到達目的地的效率。文章最后根據元胞自動機模型設計了仿真實驗,并對該系統的效率進行了評估。
關鍵詞:智能交通系統;車聯網;最優規劃;最短路徑;車輛密度;元胞自動機
中圖分類號:TP27;U49 文獻標識碼:A 文章編號:2095-1302(2017)03-00-04
0 引 言
如今的全國大中城市都普遍存在道路擁擠、車輛堵塞、交通秩序混亂的現象。隨著全國經濟的高速增長,私家車數量激增,我國城市的道路擁堵情況不斷加重,“二環看似停車場”的現象時有發生,而這樣的狀況不僅影響了居民的正常出行,還會影響消防車、救護車等公共緊急車輛,延誤救援時機,導致無法及時趕去現場造成情況惡化等慘劇的發生。因此緩解緊急車輛與其他車輛之間的矛盾,尋找使緊急車輛迅速到達現場的方法十分迫切。
智能交通系統[1]可以有效利用現有交通設施、減少交通負荷和環境污染、保證交通安全、提高運輸效率,是一個基于現代電子信息技術面向交通運輸的服務系統。該系統以信息的收集、處理、發布、交換、分析、利用為主線,為交通參與者提供多樣性的服務。各式各類的智能交通系統都對緩解交通矛盾做出了一定貢獻。
物聯網[2]是一種在計算機互聯網基礎上利用多種技術手段將任何物品與互聯網連接起來進行信息交換和通訊,以實現智能化的網絡。物聯網是新一代信息技術的重要組成部分,具有廣泛的應用,其中車聯網的概念就引申自物聯網。類似于物聯網系統,車聯網系統[3,4]以互聯網系統為基礎,是在車輛、道路、行人及互聯網之間進行信息交互的龐大的系統網絡,它能有效處理車輛、道路、行人之間的矛盾,是智能交通系統的核心基礎和發展方向。田芳等針對緊急車輛闖紅燈通行而帶來的交通安全隱患,提出了一種緊急車輛綠燈暢行系統[5]。該系統通過車載單元、中轉單元和中控單元實現緊急車輛的身份識別與信號控制機的響應,但需要人工發射信號,較為不便。
葉文斌提出了特種車輛“綠波”機制[6]。通過無線網絡技術追蹤緊急車輛的位置信息與運動狀態,兼顧了緊急車輛一路綠燈通行與避免對靜止車隊的影響。
Suresh Sharma等針對自適應燈控系統依賴圖像處理和光束中斷技術識別緊急車輛帶來的局限性,提出了一種使用RFID射頻技術檢測緊急車輛的自適應燈控系統[7]。該系統將事先決定好的配時方案儲存起來,依據檢測結果實時調整配時方案,使燈控系統的決策更為靈活。
WantaneeViriyasitavat等將DSRC技術和VANET技術有機結合[8],使得燈控系統可以通過緊急車輛發出的廣播消息意識到緊急車輛的到來,采取預設措施將緊急車輛行進方向設置為綠燈,此舉可大大提高緊急車輛的救援效率。
上述研究著眼于消除紅綠燈對緊急車輛的阻礙作用,考慮如何更快、更方便地讓信號燈辨識并放行緊急車輛。但在密集的城市交通網中,相鄰紅綠燈之間的街道上常常有上千米的距離,這使得街道的車輛密度成為阻礙緊急車輛運行的主要因素之一。此外,這些研究提出的機制都是被動地讓紅綠燈配合緊急車輛,缺少對緊急車輛的宏觀控制。緊急車輛從特定單位出發,駛向事發地點的過程中始末位置是確定的,這為緊急撤離規劃最佳線路提供了可能。本文除了為緊急車輛規劃路線,還將在現有的“綠燈通行”機制上做出擴展,利用物聯網、車聯網系統在車、人之間的信息傳遞功能,著重解決大車輛密度問題對緊急車輛的阻礙。
1 基于智能調節優化的緊急車輛引導系統
1.1 系統假設
為了便于后續討論及公式的推導,對實際情況做了如下假設和簡化:
(1)除了特殊車輛經過時的紅綠燈相位改變,其余每個紅綠燈的相位和綠信比相同;
(2)把所有車輛的變速運動簡化成勻速運動,并設它們不會撞上其他車輛時的速度為最大限速。
1.2 系統工作機制
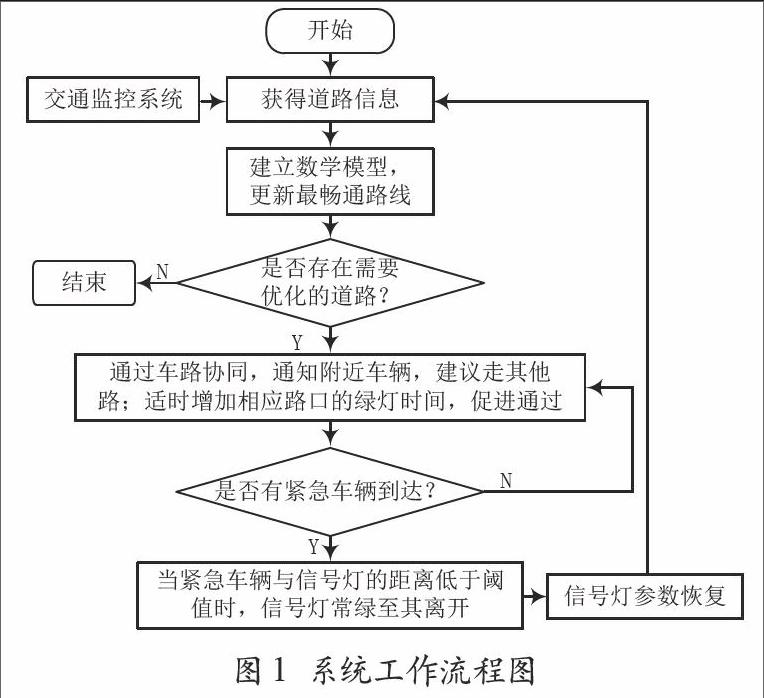
系統首先利用交通監控系統獲得各道路的車輛情況,并據此針對交通網絡建立數學模型,根據各道路的實際情況為交通網上對應的道路打分,利用分數比較不同道路的暢通程度。之后在圖上運用Dijkstra最短路徑算法為緊急車輛規劃出一條最暢通路線,通過旅行信息系統指導緊急車輛的駕駛人員選擇合適路徑。由于各街道的交通情況變化頻繁,最暢通線路需要實時更新。
系統會對最暢通線路中的道路在緊急車輛到達之前進行一些優化措施,包括調整交通信號燈的燈時分配、引導其他車輛駛入別的街道等[9,10]。這些措施通過限制其他車輛進入被優化的道路來減小這條道路的交通密度,進而提高了該道路中交通流的速度。當緊急車輛進入這條道路中后,其運行速度將會得到提高。但需要注意的是,由于本系統的優化效果在時間上存在一定的滯后性,需要長期對緊急車輛的起點進行優化控制,否則可能導致效果退化。系統工作流程圖如圖1所示。
1.3 道路交通運行評價指標
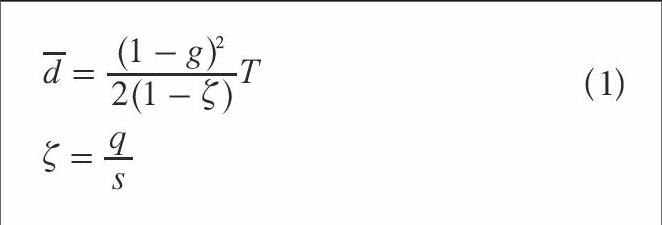
為了得到道路的最佳規劃方案,使得緊急車輛利用此方案最快地到達目的地,本文參考國內外各種評價指標[11],使用平均延誤時間來刻畫道路暢通的程度。平均延誤時間為[12]:
公式(1)中,g表示綠信比,T表示周期,q表示車輛平均到達率,s表示飽和流量下的駛離率。車輛平均到達率的表達式為:
公式(2)中,n為通過一段道路的車輛數,t為這些車完全通過的總耗時。
將公式(2)帶入到公式(1)中,可以得到:
根據公式(1)可知,每條道路的綠信比g相同,周期T也相同。針對道路長度、最大限速相同的,根據公式(2)可知,所有小車會以最大限速行駛,因此每條道路在飽和流量下的駛離率s相同。由t=x/v可知,每輛車通過每條道路的總時間t相同。結合之前的討論,本文可以將平均延誤時間進行簡化:
文中設綠信比g=0.5,周期T=25 s,飽和流量下的駛離率s=5 veh/s,平均車流速度q=2 veh/s。
由飽和流量下的駛離率s的意義可知,st是一條道路上的最大車流量,因此n≤st恒成立,所以n在其定義域內是單調遞增的,如圖2所示。
因為只需比較函數值的大小關系,所以可以直接比較自變量n的大小,以此間接比較平均延誤時間。道路的車輛數n越大,平均延誤時間越長。
1.4 暢通路線的規劃過程
一條道路的流暢程度由這條道路的平均延誤時間刻畫,并且兩條道路平均延誤時間的關系可以通過比較這兩條道路的車輛數n來間接確定。在緊急車輛運行的全過程中,其在各條道路上的時間延誤都會對其運行速度產生影響,降低效率。因此,在緊急車輛由始發地點通往目的地的路徑中,各道路對其的影響是疊加的。
緊急車輛行駛過程中,可以用每一條道路的平均延誤時間之和來刻畫這條路線的整體通暢程度。而本系統規劃的最暢通路線,實際上是在規劃一條平均延誤時間之和最小的路線,即最短路問題。由前文的討論可知,平均延誤時間之和的比較可以用各道路車輛數之和的比較來代替。
如果第i條路線一共有k條路,第j條路的車輛數是Nj,則這條路線的通暢值可以表示為:
需要說明的是,wi的數值越小,這條路線越通暢。根據Dijkstra算法計算緊急車輛的最暢通路線[13]。由于交通情況不斷變化,因此需要不斷規劃最暢通路線并實時更新。
1.5 多緊急車輛的沖突處理
康國祥、方守恩提出了一種基于模糊數學建模的對緊急事件危害程度進行量化的數學方法[14],由此可以量化緊急車輛所對應的緊急事件的緊急程度。當兩車進入同一個路口時,有以下幾種情況:
(1)兩車來自不同的道路,進入相同的道路;
(2)兩車來自不同的道路,進入不同的道路:
①兩車道路交叉;
②兩車道路不交叉;
(3)兩車來自同一個路口,進入相同或不同的道路。
在上述可能發生的幾種情況中,只有(3)中的兩車不會發生沖突。
當兩車可以錯開時,沖突便不會發生。在這種情況下,讓可以先通過的車輛通過,這樣兩車都不會因為對方而等待。
當兩車無法錯開時,(1),(2)中的情況可以使用同一種解決方法——比較兩車的緊急程度,即優先級。若兩車的優先級存在明顯的大小關系,則讓優先級高的車輛先通過,優先級低的車輛等待,隨后通過,保持原有道路不變;若兩車的優先級類似,則呼叫人工處理。
多緊急車輛沖突處理流程圖如圖3所示。
2 仿真驗證
2.1 模型假設
為了便于模型的建立及之后的討論,本文對實際情況做出如下假設:
(1)道路的規格為單向雙車道;
(2)右轉彎的車輛不需要等待紅燈,可以直接轉彎;
(3)所有車輛在不被阻礙的情況下速度總是趨向道路允許的最大限速,緊急車輛可以在不被阻礙的情況下趨向最大限速的1.2倍;
(4)所有車輛都不會超車且只可能在轉彎時變換車道;
(5)所有車輛都已接入車聯網并能很好地服從系統調度,沒有交通事故;
(6)每輛車從各路口進入這張圖的概率相等,每輛車在每個十字路口轉彎的概率相等。
2.2 模型建立
本文根據元胞自動機模型,通過Visual C++進行仿真驗證。圖4所示是仿真的具體情況:虛線的圓圈表示緊急車輛,其他圓表示其他車輛;涂成網格狀的道路表示處于優化狀態的道路。圖4中緊急車輛正在拐向水平方向的優化道路。這條道路早在緊急車輛進入前就進入了優化狀態,并當緊急車輛即將進入時,優化措施已經降低了這條道路上的車輛密度,此時其車輛密度為零。
2.3 參數設置
2.3.1 道路長度的設置
本文在陜西省西安市隨機選取并統計了部分道路的長度,結果見表1所列。
根據統計結果,本文取其平均值作為仿真程序中的仿真道路的長度,即706米。
2.3.2 道路寬度與最大限速的設置
根據我國發布的《城市道路設計規范》[15]中的相關規定,本文將仿真程序中的仿真道路寬度定為50 m,仿真道路的最大限速定為50 km/h。
2.3.3 車輛轉彎概率的設置
本文在陜西省西安市隨機選取一些十字路口,并針對各路口統計一定時間內車輛的轉彎概率,統計結果見表2所列。
根據統計結果,本文取其平均值作為仿真程序中仿真車輛的轉彎概率,即41%。
2.4 仿真結果與分析
仿真結果如圖5所示。出車頻率指仿真程序中模擬車輛進入地圖的頻率,頻率越大,單位時間內進入地圖的車輛就越多,地圖就越擁擠。
由圖5中的虛線可知,無論出車頻率如何變化,經本文系統優化的小車的速度始終保持在35 km/h左右,說明道路擁擠程度對本文優化機制的影響微乎其微,體現了本系統效果穩定的特點。在一定限度內可以認為,經本文系統優化的車輛不受路況影響。反觀未經優化的車輛,其車速隨著道路擁擠程度的變化比較明顯,可見道路擁擠程度對于未優化車輛有較大影響。以頻率為1時的情況為例,緊急車輛的平均速度在優化之后約為未優化時的1.75倍,這說明本系統能在道路擁堵時發揮有效作用。
為了與綠燈暢行系統對比,本文選取了一個特種車輛綠波機制[6]進行了相同方式的仿真實驗,其結果如圖5中的點線所示。可以發現其圖像在擁擠程度低(出車頻率低)的情況下,其優化效果與本文系統的優化效果基本一致,然而隨著擁擠程度的增加,其優化效果明顯退化。雖然“綠波機制”因消除了紅綠燈對緊急撤離的阻礙作用而不會與不優化的圖像過分接近,但隨著車輛密度的增加,其對緊急車輛的阻礙作用也不斷增強,效果仍然會發生明顯退化。由此可見本文系統能夠較好地彌補現有綠燈暢行系統的些許遺憾之處。
3 結 語
本文針對目前綠燈暢行系統的不足,提出了一種緊急車輛引導系統,該系統通過智能調節優化與車聯網、物聯網的信息交互功能,減少了緊急車輛經過道路的車輛密度,進而提高了緊急車輛的運行效率。本文通過設計仿真實驗,證明了這種系統相比綠燈暢行系統而言優化效果更好,且隨著交通擁擠程度的增加,優化效果沒有產生明顯退化,體現了本文系統在穩定性、有效性方面的價值。
參考文獻
[1]趙娜,袁家斌,徐晗.智能交通系統綜述[J].計算機科學,2014,41(11):7-11.
[2]王曉靜,張晉.物聯網研究綜述[J].遼寧大學學報(自然科學版),2010,37(1):37-39.
[3]蘇靜,王冬,張菲菲.車聯網技術應用綜述[J].物聯網技術,2014,4(6):69-72.
[4]藺宏良,黃曉鵬.車聯網技術研究綜述[J].機電工程,2014,31(9):1235-1238.
[5]田芳,王強.特種車輛綠燈暢行系統[J].黑龍江工程學院學報(自然科學版),2009,23(2):44-47.
[6]葉文斌.基于紅綠燈優化城市交通控制設計與仿真[D].上海:華東師范大學,2015.
[7] SureshSharma,AlokPithora,GauravGupta,et al.TrafficLightPriorityControlForEmergencyVehicleUsingRFID[J].InternationalJournalofInnovationsinEngineeringAndTechnology(IJIET).2013,2(2):363-365.
[8] Viriyasitavat W, Tonguz O K. Priority Management of Emergency Vehicles at Intersections Using Self-Organized Traffic Control[C].IEEE Vehicular Technology Conference,2012:1-4.
[9]李佳.智能交通系統擁塞控制的研究與設計[D]. 哈爾濱:哈爾濱工業大學,2009.
[10]譚惠麗,劉慕仁,孔令江.十字路口紅綠燈的控制效應[J].廣西師范大學學報(自然科學版),2008,26(2):18-21.
[11]鄭淑鑒,楊敬鋒.國內外交通擁堵評價指標計算方法研究[J].公路與汽運,2014(1):57-61.
[12]夏朋亮.基于城市公路干線交叉口的信號控制算法研究與仿真[D].成都:西南交通大學,2013.
[13]孫淑軍.基于車路協同的智能車調度系統及方法研究[D].大連:大連理工大學,2014.
[14]康國祥,方守恩.區域路網緊急事件危害度評價指標及評價方法研究[C].2009全國博士生學術論壇—交通運輸工程學科,2009.
[15]城市道路設計規范[M].北京:中國建筑工業出版社,1991.
