基于TOA的布料車定位系統(tǒng)
2017-03-30 12:18:43王志忠馬連成王永增吳雅南李希飛
物聯(lián)網(wǎng)技術(shù) 2017年3期
王志忠+馬連成+王永增+吳雅南+李希飛+張航+何杰


摘 要:布料車是工業(yè)現(xiàn)場一種常見的軌道車,傳統(tǒng)人工控制效率較低。文中設(shè)計了一種基于信號傳播時間技術(shù)的布料車定位系統(tǒng),并將定位結(jié)果轉(zhuǎn)化為4~20 mA的PLC控制信號后接入布料車控制系統(tǒng)中,實(shí)現(xiàn)了基于精確定位的布料車自動控制。文中開發(fā)了布料車定位系統(tǒng)的實(shí)際硬件,利用均值濾波、卡爾曼濾波等算法實(shí)現(xiàn)了布料車的精確定位。將該系統(tǒng)部署到鞍山鋼鐵集團(tuán)公司的實(shí)際工業(yè)現(xiàn)場,現(xiàn)場測試結(jié)果顯示該系統(tǒng)具有很好的定位精度,能夠滿足工業(yè)現(xiàn)場布料車控制的需求。
關(guān)鍵詞:超寬帶;無線定位;時間到達(dá);工業(yè)物聯(lián)網(wǎng);布料車;室內(nèi)定位
中圖分類號:TP393 文獻(xiàn)標(biāo)識碼:A 文章編號:2095-1302(2017)03-00-04
0 引 言
目前,傳統(tǒng)工業(yè)正在向智能制造的方向快速發(fā)展。中國、美國、德國、日本等主要工業(yè)大國都提出了各自的智能工業(yè)發(fā)展計劃。在智能制造中,基于工業(yè)物聯(lián)網(wǎng)的狀態(tài)監(jiān)測和控制將成為一種重要的基礎(chǔ)設(shè)施。積極開展工業(yè)物聯(lián)網(wǎng)的實(shí)際應(yīng)用嘗試能夠加快工業(yè)物聯(lián)網(wǎng)的產(chǎn)業(yè)化進(jìn)程并加速我國傳統(tǒng)制造業(yè)的智能化改造。在工業(yè)環(huán)境中,移動目標(biāo)的控制是一項(xiàng)重要工作。對移動目標(biāo)進(jìn)行精確定位是移動目標(biāo)自動控制的基礎(chǔ)。布料車是一種將物料投放到不同料倉的軌道布料車,是一種典型工業(yè)環(huán)境中的移動目標(biāo)。傳統(tǒng)的操作方式是操作員控制布料車運(yùn)行到所需投放的料倉位置,然后再進(jìn)行物料投放。這種方式需要通過觀察布料車的當(dāng)前位置來實(shí)現(xiàn)控制,效率低、人力成本高。利用室內(nèi)定位技術(shù)對布料車的位置進(jìn)行實(shí)時精確定位,實(shí)現(xiàn)布料車的自動控制。布料車定位是室內(nèi)定位技術(shù)在工業(yè)現(xiàn)場的典型應(yīng)用。
室內(nèi)定位技術(shù)是多移動物體軌跡相關(guān)性分析、室內(nèi)目標(biāo)跟蹤、基于位置的服務(wù)、移動機(jī)器人等應(yīng)用系統(tǒng)研發(fā)的核心,已得到廣泛重視與研究。尤其伴隨著射頻信號處理技術(shù)的發(fā)展,基于射頻信號測距的室內(nèi)定位技術(shù)被創(chuàng)新地應(yīng)用到諸多領(lǐng)域[1]。如全球定位系統(tǒng)GPS無法覆蓋的室內(nèi)、隧道、礦井,通過基于射頻信號測距進(jìn)行目標(biāo)定位,實(shí)現(xiàn)基于位置的服務(wù)。應(yīng)用室內(nèi)定位技術(shù)進(jìn)行多目標(biāo)跟蹤,通過分析多移動目標(biāo)軌跡的相關(guān)性,實(shí)現(xiàn)智能物資人力管理、智能醫(yī)療、公共場所安全防務(wù)、高危行業(yè)的安全級別提升等。通過距離或位置監(jiān)測控制機(jī)器人的運(yùn)動,以及在無線傳感器網(wǎng)絡(luò)中應(yīng)用位置信息進(jìn)行路由通路選擇等。射頻信號測距方法有很多[2-5],包括基于接收信號強(qiáng)度(Received Signal Strength Indicator,RSSI)的測距、基于信號傳播時間(Time of Arrival,TOA)的測距、基于信號傳播時間差(Time Difference of Arrival,TDOA)的測距、基于接收信號角度(Angle of Arrival,AOA)的測距[6]、基于接收信號相位差(Phase Difference of Arrival,PDOA)的測距等。基于RSSI測距是在已知發(fā)射功率的前提下,通過測量接收方的信號強(qiáng)度RSSI來計算兩點(diǎn)之間的距離。這種方法雖然符合低功率、低成本的要求,但可能產(chǎn)生±50%的測距誤差,被認(rèn)為是一種不可靠的定位方法[5]。基于TOA測距[7]通過測量一個往返過程中信號(RF、超聲波等)傳輸時間來計算發(fā)送方到接收方的距離。基于TDOA測距首先需要進(jìn)行節(jié)點(diǎn)間時鐘同步,然后通過測量信號發(fā)出時間和信號接收時間來計算兩節(jié)點(diǎn)間的距離。基于TOA測距和基于TDOA測距都能達(dá)到較高精度,但基于TDOA測距對硬件配置要求高,因此成本較高[3]。與基于RSSI測距及基于TOA/TDOA測距不同,基于AOA的測距利用鄰居節(jié)點(diǎn)提供的方位或角度信息來確定節(jié)點(diǎn)間的距離,需要專用硬件支持。因此,基于TOA測距被公認(rèn)為一種性價比較高的方法。
本文設(shè)計了一種基于TOA的布料車定位系統(tǒng),開發(fā)了布料車定位系統(tǒng)的硬件和定位算法,并將該系統(tǒng)部署到了鞍山鋼鐵集團(tuán)公司的實(shí)際工業(yè)現(xiàn)場中。現(xiàn)場測試實(shí)驗(yàn)結(jié)果顯示該系統(tǒng)具有良好的定位精度,能滿足工業(yè)現(xiàn)場布料車控制的需求。
1 系統(tǒng)結(jié)構(gòu)與硬件設(shè)計
1.1 系統(tǒng)結(jié)構(gòu)
本系統(tǒng)利用TOA定位技術(shù)對布料車進(jìn)行實(shí)時定位,系統(tǒng)結(jié)構(gòu)如圖1所示,包括錨節(jié)點(diǎn)(Anchor)、標(biāo)簽(Tag)和匯聚 (Sink)。由于布料車運(yùn)行在一維軌道上,本系統(tǒng)在軌道兩端正上方各安裝了1個錨節(jié)點(diǎn)。標(biāo)簽節(jié)點(diǎn)安裝在布料車上,實(shí)現(xiàn)與錨節(jié)點(diǎn)測距和自身位置坐標(biāo)的計算,并將計算結(jié)果發(fā)送給匯聚節(jié)點(diǎn)。匯聚節(jié)點(diǎn)連接到布料車的控制系統(tǒng)中,將從標(biāo)簽接收到的數(shù)據(jù)轉(zhuǎn)發(fā)給布料車控制系統(tǒng),實(shí)現(xiàn)布料車的自動控制。
1.2 硬件設(shè)計
布料車定位系統(tǒng)的主要功能為定位和數(shù)據(jù)通信。在多金屬的工業(yè)現(xiàn)場室內(nèi)環(huán)境中,大量金屬設(shè)備造成嚴(yán)重的多徑傳輸現(xiàn)象,并影響測距/定位精度和數(shù)據(jù)傳輸可靠性。為降低多徑傳輸對系統(tǒng)的影響,本文在測距/定位射頻模塊和數(shù)據(jù)通信射頻模塊進(jìn)行了有針對性的選型。
1.2.1 測距/定位射頻模塊
目前,TOA(Time of Arrival,TOA)是最為常用的高精度測距技術(shù),其原理是測量信號在介質(zhì)中的傳輸時間,進(jìn)而計算出信號的傳輸距離。 IEEE 802.15.4a標(biāo)準(zhǔn)定義了TOA技術(shù)的兩種物理層通信技術(shù):Chirp擴(kuò)頻技術(shù)(Chirp Spread Spectrum, CSS[7])和超寬帶技術(shù)(Ultra-Wide Band, UWB)[8,9]。其中,CSS技術(shù)的通信頻率為2.40~2.483 GHz,通信帶寬為83 MHz;UWB技術(shù)的通信頻率為3.1~10 GHz,通信帶寬至少要達(dá)到500 MHz[10]。兩種技術(shù)的典型芯片分別為基于CCS物理層的NanoLOC和基于UWB物理層的DW1000[11,12]。對于TOA測距而言,帶寬越寬則對抗多徑干擾的能力越強(qiáng)。因此,本文選擇DW1000作為測距芯片。
1.2.2 數(shù)據(jù)通信射頻模塊
由于布料車與控制系統(tǒng)之間的距離較遠(yuǎn),使用UWB技術(shù)無法滿足通信距離的要求。本文選擇433 MHz的SX1276[13]作為數(shù)據(jù)通信射頻模塊。433 MHz是ISM公開頻段,波長較長,具有較好的繞射能力。與傳統(tǒng)的433 MHz射頻芯片相比,SX1276使用了線性擴(kuò)頻技術(shù),提升了對抗多徑干擾的能力,進(jìn)而提高了接收靈敏度、通信距離和傳輸可靠性。
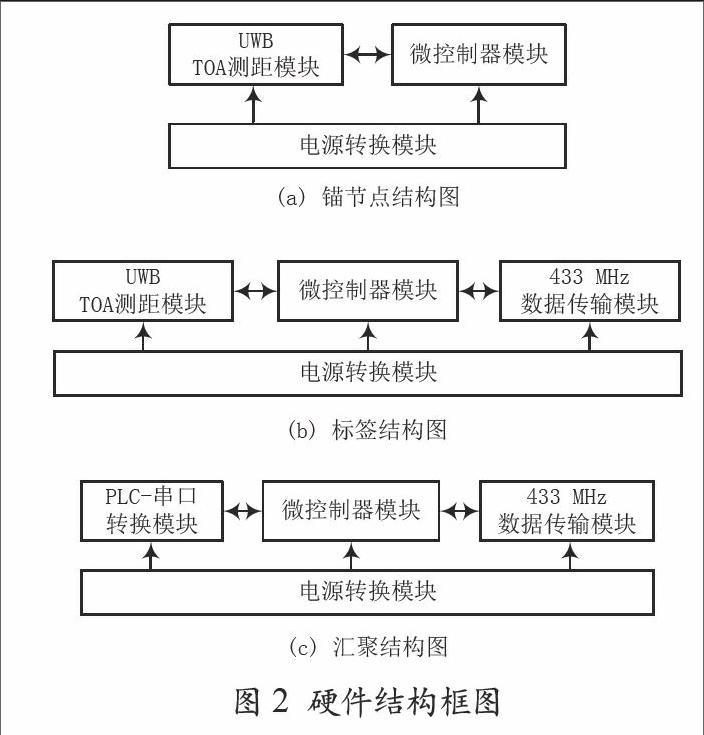
其他硬件主要包括微控制器STM32103F、220 V/380 V轉(zhuǎn)5 V電源模塊、布料車控制系統(tǒng)接口模塊等。
錨節(jié)點(diǎn)、標(biāo)簽和匯聚的硬件模塊結(jié)構(gòu)分別如圖2(a) ,圖2 (b) ,圖2 (c)所示。
2 布料車定位算法
TOA測距精度主要受多徑傳輸、非視距傳輸和到達(dá)時間檢測精度的影響。前兩者取決于系統(tǒng)部署環(huán)境,后者取決于硬件本身的實(shí)現(xiàn)。在布料車定位系統(tǒng)中,可以通過Anchor節(jié)點(diǎn)和Tag節(jié)點(diǎn)安裝位置的選擇來避免非視距,但多徑傳輸和到達(dá)時間檢測精度無法避免。為減少多徑傳輸和到達(dá)時間檢查精度的影響,提高系統(tǒng)定位精度,本文采用如下做法:
(1)在TOA測距的基礎(chǔ)上,對測距結(jié)果進(jìn)行均值濾波,提高測距精度;
(2)采用一維質(zhì)心定位算法,計算Tag的坐標(biāo);
(3)采用卡爾曼濾波算法對定位結(jié)果進(jìn)行平滑。
2.1 TOA測距算法和均值濾波算法
本系統(tǒng)采用無線測量基于信號到達(dá)時間(Time of Arrival,TOA)的距離測量方法,其工作原理如圖3所示。
Tag和Anchor為進(jìn)行TOA測距的兩個節(jié)點(diǎn)。T1為Tag向Anchor發(fā)送Ranging Data的時刻;T2為Anchor收到Ranging Data的時刻;T3為Anchor向Tag發(fā)送ACK的時刻;T4為Tag收到ACK的時刻。Tag和Anchor通過本地時鐘分別測量發(fā)射和接收的時間長度,計算出信號在兩個設(shè)備之間的傳輸時間。設(shè)備之間的距離由公式(1)得出:
其中,c為光速。
本文采用了均值濾波算法(也稱為鄰域平均法)來進(jìn)一步提高測距精度。均值濾波的基本原理是用均值代替m個原測距值,每隔m個測距值,取一個均值作為當(dāng)前測距值,如式(2)所示:
2.2 一維質(zhì)心定位算法
布料車運(yùn)行在一維軌道上,因此可以采用一維質(zhì)心定位算法,其原理如圖4所示。整個坐標(biāo)系所在平面為布料車所在軌道、AnchorA和AnchorB一起構(gòu)成的平面,以布料車運(yùn)行起點(diǎn)為坐標(biāo)原點(diǎn),軌道為X軸,高度為Y軸。兩個錨節(jié)點(diǎn)坐標(biāo)分別為AnchorA(XA,YA)和AnchorB(XB,YB);未知標(biāo)簽節(jié)點(diǎn)Tag(XT,0)。AnchorA到Tag測得的距離為DISA,因?yàn)橹荒軠y到距離值,所以Tag有可能在AnchorA的左邊或右邊,設(shè)為DISA1、DISA2。AnchorB到Tag測得的距離為DISB,同理,得到DISB1、DISB2。通過勾股定理能夠計算出X軸到AnchorA的距離為DISA的兩個點(diǎn)(X1,0)和(X2,0),到AnchorB的距離為DISB的兩個點(diǎn)(X3,0)和(X4,0)。X1、X2、X3、X4的值由式(3)得出:
對兩個候選坐標(biāo)求平均獲得Tag的坐標(biāo),由式(5)求得:
2.3 卡爾曼濾波算法
本系統(tǒng)對定位結(jié)果采用卡爾曼濾波(Kalman Filtering),以提高定位精度。卡爾曼濾波是一種利用線性系統(tǒng)狀態(tài)方程,通過系統(tǒng)輸入輸出觀測數(shù)據(jù),對系統(tǒng)狀態(tài)進(jìn)行最優(yōu)估計的算法。由于觀測數(shù)據(jù)中包括系統(tǒng)中的噪聲和干擾影響,所以最優(yōu)估計也可看作濾波過程。
首先利用系統(tǒng)的過程模型來預(yù)測下一時刻布料車的位置。假設(shè)現(xiàn)在的系統(tǒng)狀態(tài)是k,根據(jù)系統(tǒng)模型,可以基于布料車上一時刻的位置信息而預(yù)測出當(dāng)前位置:
式(6)中, X(k-1|k-1)是k-1時刻布料車的位置, X(k|k-1)是k時刻布料車的位置,U(k)是k時刻對系統(tǒng)的控制量,在該系統(tǒng)中表示布料車移動的加速度,因?yàn)椴剂宪嚍閯蛩傩旭偅訳=0。A和B是系統(tǒng)參數(shù),對于多模型系統(tǒng),其為矩陣,本系統(tǒng)中A=1。
用P表示協(xié)方差(covariance),則:
式(7)中, P(k|k-1)是X(k|k-1)對應(yīng)的協(xié)方差, P(k-1|k-1)是X (k-1|k-1)對應(yīng)的協(xié)方差, A'表示A的轉(zhuǎn)置矩陣,Q是系統(tǒng)過程的協(xié)方差。
得到布料車位置的預(yù)測結(jié)果,再收集現(xiàn)在位置的測量值。結(jié)合預(yù)測值和測量值,可以得到當(dāng)前位置(k)的最優(yōu)化估算值X(k|k),如式(8)所示:
3 驗(yàn)證
為了測試驗(yàn)證系統(tǒng)的有效性,對系統(tǒng)進(jìn)行實(shí)際場景下的測試分析。測試環(huán)境和測試節(jié)點(diǎn)如圖5所示,軌道長度160 m。系統(tǒng)測試包括測距和定位兩方面。
3.1 測距精度分析
本文在實(shí)際場景中進(jìn)行了大量測距實(shí)驗(yàn),并統(tǒng)計了測距誤差累計分布(Cumulative Distribution Figure, CDF)和測距誤差的均值和方差。對均值濾波后的測距誤差和均值濾波前的原始測距誤差進(jìn)行對比。測距誤差定義如式(11)所示:
式中,Δd為測距誤差,為測距值,d為真實(shí)距離。
均值濾波前后的CDF對比如圖6所示,均值和方差對比見表1所列。通過對比可知均值濾波后的測距誤差小于均值濾波前的原始測距誤差。因此,均值濾波能夠起到提高測距精度的作用。
3.2 定位結(jié)果分析
在定位結(jié)果分析中,本文統(tǒng)計了定位誤差累計分布(Cumulative Distribution Figure, CDF)和測距誤差的均值和方差。對卡爾曼濾波后的定位誤差和卡爾曼濾波前的原始測距誤差進(jìn)行對比。由于是一維定位,因此定位誤差定義如式(12)所示:
式中,e為定位誤差,為標(biāo)簽的X軸定位結(jié)果,XT為標(biāo)簽的X軸真實(shí)坐標(biāo)。
卡爾曼濾波前后的定位誤差CDF對比如圖7所示,定位誤差均值和方差對比見表2所列。通過對比可知,卡爾曼濾波后的定位誤差小于濾波前的原始測距誤差。因此,卡爾曼濾波能夠起到提高定位精度的作用。
4 結(jié) 語
布料車定位是室內(nèi)定位技術(shù)在工業(yè)現(xiàn)場的一種典型應(yīng)用。本文設(shè)計了一種基于TOA的布料車定位系統(tǒng),設(shè)計并開發(fā)了布料車定位系統(tǒng)的硬件和定位算法,并將該系統(tǒng)部署到了鞍山鋼鐵集團(tuán)公司的實(shí)際工業(yè)現(xiàn)場中。現(xiàn)場測試實(shí)驗(yàn)結(jié)果顯示,該系統(tǒng)具有較高的定位精度,能夠滿足工業(yè)現(xiàn)場布料車控制的需求。
參考文獻(xiàn)
[1] Liu H, Darabi H, Banerjee P, et al. Survey of wireless indoor positioning techniques and systems[J].IEEE Transactions on Systems, Man, and Cybernetics, Part C (Applications and Reviews), 2007, 37(6): 1067-1080.
[2]于峰.無線傳感器網(wǎng)絡(luò)定位研究[D].北京:北京科技大學(xué), 2009.
[3] Alsindi N, Li X, Pahlavan K. Performance of TOA estimation algorithms in different indoor multipath conditions[C].Wireless Communications and Networking Conference, 2004. WCNC. 2004 IEEE. IEEE, 2004: 495-500.
[4] PATWARI N. Location estimation in sensor networks(PhD. Thesis)[D].Hero III A O, Thesis Supervisor. MI, USA: EECS Department, University of Michigan, 2005.
[5] Parameswaran A T, Husain M I, Upadhyaya S. Is rssi a reliable parameter in sensor localization algorithms: An experimental study[C].Field Failure Data Analysis Workshop (F2DA09).IEEE, 2009: 5.
[6] Lee J S, Su Y W, Shen C C. A comparative study of wireless protocols: Bluetooth, UWB, ZigBee, and WiFi[C].Industrial Electronics Society, 2007. IECON 2007. 33rd Annual Conference of the IEEE. IEEE,2007: 46-51.
[7]王沁,何杰,張前雄,等.測距誤差分級的室內(nèi)TOA定位算法[J].儀器儀表學(xué)報,2011,32(12): 2851-2856.
[8] Nguyen V H, Pyun J Y. Location detection and tracking of moving targets by a 2D IR-UWB radar system[J].Sensors, 2015, 15(3): 6740-6762.
[9] He J, Li S, Pahlavan K, et al. A realtime testbed for performance evaluation of indoor TOA location system[C].2012 IEEE International Conference on Communications (ICC). 2012: 482-486.
[10] Feng G, Shen C, Long C, et al. GDOP index in UWB indoor location system experiment[C].SENSORS, IEEE, 2015: 1-4.
[11] Khalaf-Allah M. Time of arrival (TOA)-based direct location method[C].2015 16th International Radar Symposium (IRS). IEEE, 2015: 812-815.
[12]楊狄,唐小妹,李柏渝,等.基于超寬帶的室內(nèi)定位技術(shù)研究綜述[J].全球定位系統(tǒng),2015,40(5):34-40.
[13] Vangelista L, Zanella A, Zorzi M. Long-Range IoT Technologies: The Dawn of LoRa?[C].Future Access Enablers of Ubiquitous and Intelligent Infrastructures. Springer International Publishing,2015: 51-58.

- 物聯(lián)網(wǎng)技術(shù)的其它文章
- 虛擬現(xiàn)實(shí)技術(shù)在高校實(shí)驗(yàn)課堂教學(xué)中的應(yīng)用研究
- 以科技創(chuàng)業(yè)為導(dǎo)向的《傳感器與檢測技術(shù)》教學(xué)與考核改革
- 面向高職高專的慕課大數(shù)據(jù)分析及應(yīng)用
- 基于現(xiàn)代學(xué)徒制的高職物聯(lián)網(wǎng)專業(yè)建設(shè)研究
- 智慧引領(lǐng)發(fā)展 德陽智慧旅游平臺培訓(xùn)工作會成功召開
- 臨沂市環(huán)保局召開智慧城市—生態(tài)環(huán)保大數(shù)據(jù)聯(lián)網(wǎng)應(yīng)用市直部門座談會