基于自整定模糊PID的多電機同步控制策略研究
2017-03-28 15:17:23趙碩偉楊振元關艷翠
山東工業技術 2017年4期
趙碩偉+楊振元+關艷翠
摘 要:本文主要針對多電機同步控制,采用先進技術設計了一種能夠進行參數自整定模糊PID多電機同步控制策略。在研究的過程當中,將傳統的PID控制原理與模糊控制原理進行了有效的結合,并且積極運用了模糊推理判斷思想,主要對自整定模糊PID控制器,在參數變化而形成不同偏差變化率、速遞偏差的多電機實時變化中所產生的效果進行了分析研究。最終通過仿真結果的分析發現,該種策略具有速度快、穩定性好、高同步精度、動態性好等諸多優勢。
關鍵詞:自整定模糊PID;多電機同步控制;模糊控制
DOI:10.16640/j.cnki.37-1222/t.2017.04.169
0 前言
在多電機同步控制當中能夠應用到諸多先進的控制理論,其控制內容一般包括主從控制、同一輸入控制、等狀態耦合控制、交叉耦合控制等多個方面。其中,交叉耦合控制能夠使臨近的兩臺電機進行交叉耦合,有助于簡化偏差耦合控制。另外,若運用可變增益的PID控制方法,將能夠盡量解決系統響應當中的快速性和超調量之間的矛盾,具有重要積極意義。為此,有必要在基于自整定模糊PID的情況下對多電機同步控制策略進行研究。
1 自整定模糊PID控制器設計
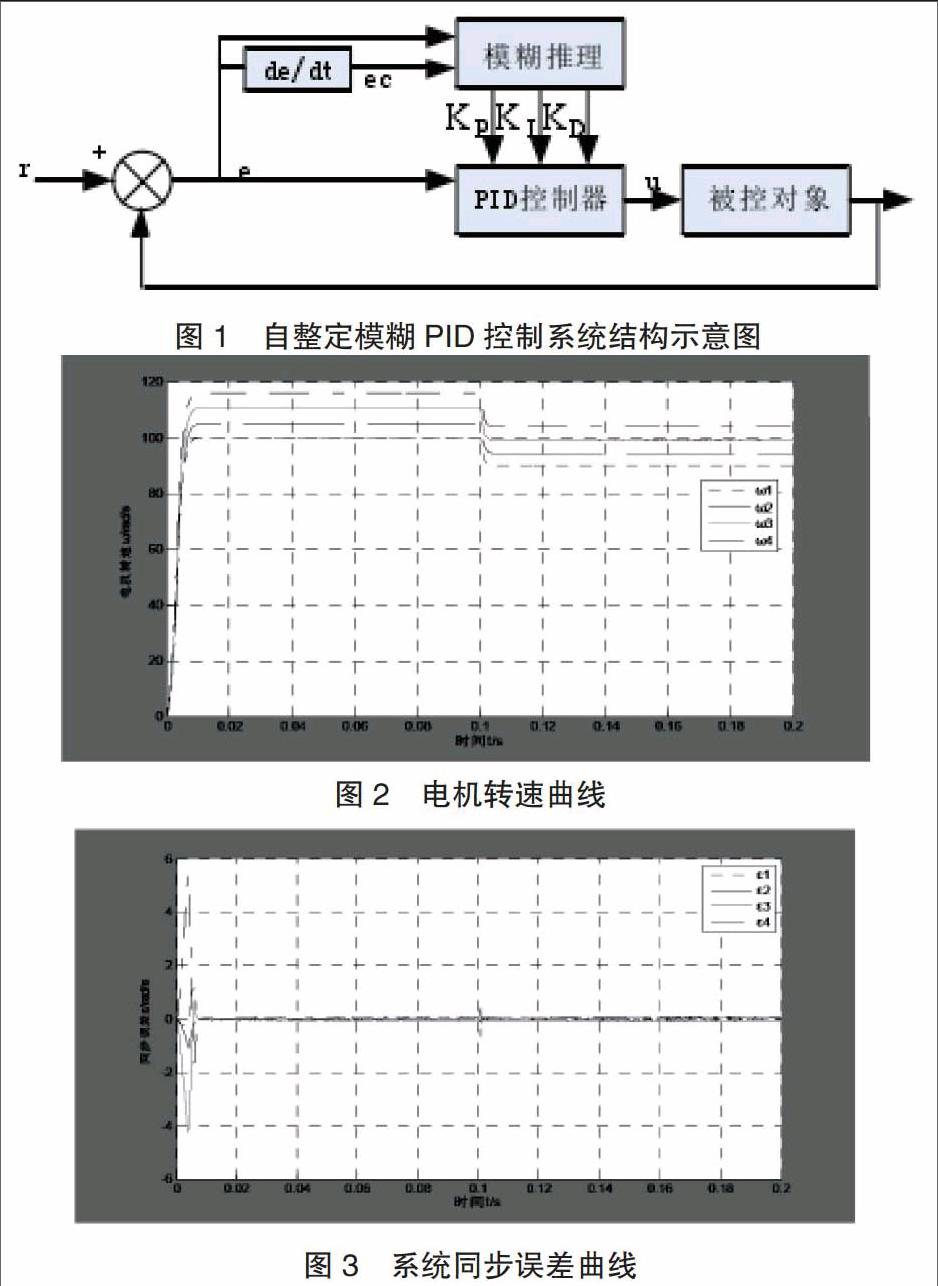
本文在設計的過程中將傳統PID控制與模糊控制進行了有效的結合,形成了自整定模糊PID控制器,基本如圖1所示。
該系統結構當中的PID參數主要根據其初始值進行自整定而得出,其中KP、KI和KD分別為根據模糊理論所推理而得出的自調整量,其初始值分別為KP0、KI0和KD0。若將誤差設置為e,將誤差變化率設置為è,則通過整個系統當中的PID參數不自調整量與量化因子相乘,結合模糊化體現模糊變量,將能夠得出負大、負中、負小、零、正小、正中、正大幾種結果[1]。再結合模糊論域以及隸屬度函數、三角函數,將能夠得出49條模糊規則。將通過模糊理論得出的模糊結果,利用反模糊化重心法進行模糊的解釋,并且將KP、KI和KD的精確值進行轉化后,將能夠得到相應的PID控制器實時參數[2]。
2 改進型環形交叉耦合控制結構
對改進型環形交叉耦合控制結構進行分析時發現,若多電機系統當中存在的諸多電機之間轉速能夠形成一定的比例,與此同時,通過其形成的轉速比例與同步系數進行相比,將能夠得到相應的相鄰兩個電機之間所產生的同步轉速誤差。若將整個同步控制系統分為多個子系統,則可以將每一臺電機與其相鄰的兩臺電機進行相互關聯。針對每一個子系統,必須要保證對其誤差進行跟蹤,且保證同步誤差始終保持在0左右。通過該種方式將能夠保證整個控制系統能夠按照規定的比例進行運行,且每一個子系統能夠與整個系統均保持同步。
3 分析仿真結果
構建4臺電機所組成的多電機同步控制系統仿真模型,各電機參數基本為:額定轉速為2500r/min,額定功率為1.5kW,永磁磁鏈為0.104Wb,極對數為4[3]。此時,可以選擇誤差e,和誤差變化率è進行模糊PID控制器輸入,進而通過跟蹤誤差控制器設置相應的初始值。經過多次的仿真實驗,將KP、KI和KD和e、è的變化范圍均予以確定,進而選取比例系數,將其治愈跟送誤差控 制器當中計算同步誤差。自整定PID模糊控制器能夠對不同時刻在PID3個參數,以及e和è之間的模糊關系進行查找。正在整個控制系統運行的過程當中,可以對e和è進行不斷的檢測,并且根據模糊控制思想,可以對KP、KI和KD3個參數進行實時的修改。此時,基于自整定模糊PID控制的相鄰交叉耦合控制結構,將能夠在多電機比例協同控制系統當中,通過計算機技術形成仿真曲線,如下圖所示。
根據圖2和圖3的仿真曲線結果可以發現,本文所提出的給予自整定模糊PID的多電機同步控制系統當中,各個電機若能夠在0.01s的時候進入到穩定的狀態,則整個系統將在運行的動態過程當中并不會產生十分明顯的超調。同時,若本系統在同步控制當中所產生的誤差低于5%,則在該系統出現降速時會出現1%以內的同步誤差,但是其恢復穩定比較迅速。由此可見,基于自整定模糊PID的多電機同步控制系統,能夠具有比較強的抗擾性,且能夠有效改善該系統性能。
結論:本文將傳統的PID控制與模糊控制進行了有效結合,設計了自整定模糊PID控制器。通過不斷的仿真實驗且對仿真結果進行分析后發現,改進型的環形交叉耦合結構模糊PID控制算法,能夠對同步控制精度進行良好的把握,且能夠有效控制同步速度,便于實現多電機的同步控制,具有比較良好的實際應用效果。
參考文獻:
[1]侯崇升.基于自適應模糊PID的鋼板橫剪生產線多電機同步控制系統設計[J].制造業自動化,2013,17(07):50-53.
[2]付光杰,林雨晴,崔海龍.基于模糊自整定PID的永磁同步電機矢量控制[J].化工自動化及儀表,2015,07(11):739-741.
