基于模糊自適應PID控制的ATO系統控制算法*
2017-03-27 08:55:05錢存元施招東
城市軌道交通研究 2017年3期
劉 浩 錢存元 施招東
(同濟大學鐵道與城市軌道交通研究院,201804,上海∥第一作者,碩士研究生)
基于模糊自適應PID控制的ATO系統控制算法*
劉 浩 錢存元 施招東
(同濟大學鐵道與城市軌道交通研究院,201804,上海∥第一作者,碩士研究生)
為了研究ATO系統控制算法的智能性和高效性,在傳統PID算法的基礎上,充分考慮到列車系統的非線性和復雜性,結合模糊控制理論能進行實時非線性調節的優點,提出了模糊自適應PID控制算法。并在Matlab/Simulink中建立了ATO系統的仿真模型和算法控制模塊。將兩種算法分別運用到ATO系統中,對目標速度曲線進行跟蹤,從停車精度、追溯性、準時性、節能性、舒適性五個方面對二者的控制性能進行比較分析。仿真結果表明,將模糊自適應PID算法運用到ATO系統中,列車的控制性能能夠很好地滿足ATO系統的各個性能指標要求。
列車自動駕駛系統; PID控制算法; 模糊自適應PID; 目標速度曲線
作為ATC(列車自動控制)系統的關鍵子系統之一,ATO(列車自動駕駛)系統是城市軌道交通列車實現自動駕駛、降低能耗、提高效率和運營安全的基礎[1-3]。隨著ATO系統的不斷發展,國內外對ATO控制算法的研究取得了較為顯著的成果。
目前主流的ATO系統控制算法主要包括傳統PID(比例-積分-微分)控制算法、模糊控制算法、遺傳算法及神經網絡控制算法等。然而這些算法都存在著一定的局限性。采用傳統PID算法,則工況切換時列車速度的變化次數過多,舒適性差,能耗較大;模糊控制雖然舒適性好,但速度控制精度低;遺傳算法和神經網絡控制算法由于其快速性、追溯性較差,故更適于系統優化[4]。
本文結合傳統PID算法與模糊控制的優點,提出了模糊自適應PID算法,試圖解決ATO系統速度跟蹤過程中的追溯性、舒適性及節能性等問題,為開發智能高效的ATO系統提供技術參考。
1 ATO系統的架構及性能指標
1.1 ATO系統構成及原理
ATC系統包含ATO系統、ATP(列車自動防護)系統和ATS(列車自動監控)系統等3個子系統。ATO系統是代替司機實現列車自動駕駛的系統;可在ATP系統的保護下,根據ATS系統的指令實現列車的自動駕駛;能夠自動完成對列車的起動、牽引、巡航、惰行和制動的控制,確保達到設計的間隔和行駛速度,從而實現列車的自動駕駛;具有提高乘客舒適度及列車的準點率,運營安全等優點。ATP系統在ATC系統中主要負責監測列車安全運行,其主要功能包括列車運行超速防護、列車車門及屏蔽門的安全監督等。ATS系統主要負責編制列車運行圖,并根據運行圖自動辦理列車進路,自動調整列車運行間隔;依靠現場的行車信息,實現組織和控制行車的指揮。ATC設備主要包括車載控制器(車載ATP設備和車載ATO設備)和地面設置的區域控制器、數據存儲單元及ATS設備。ATC系統的原理圖如圖1所示。
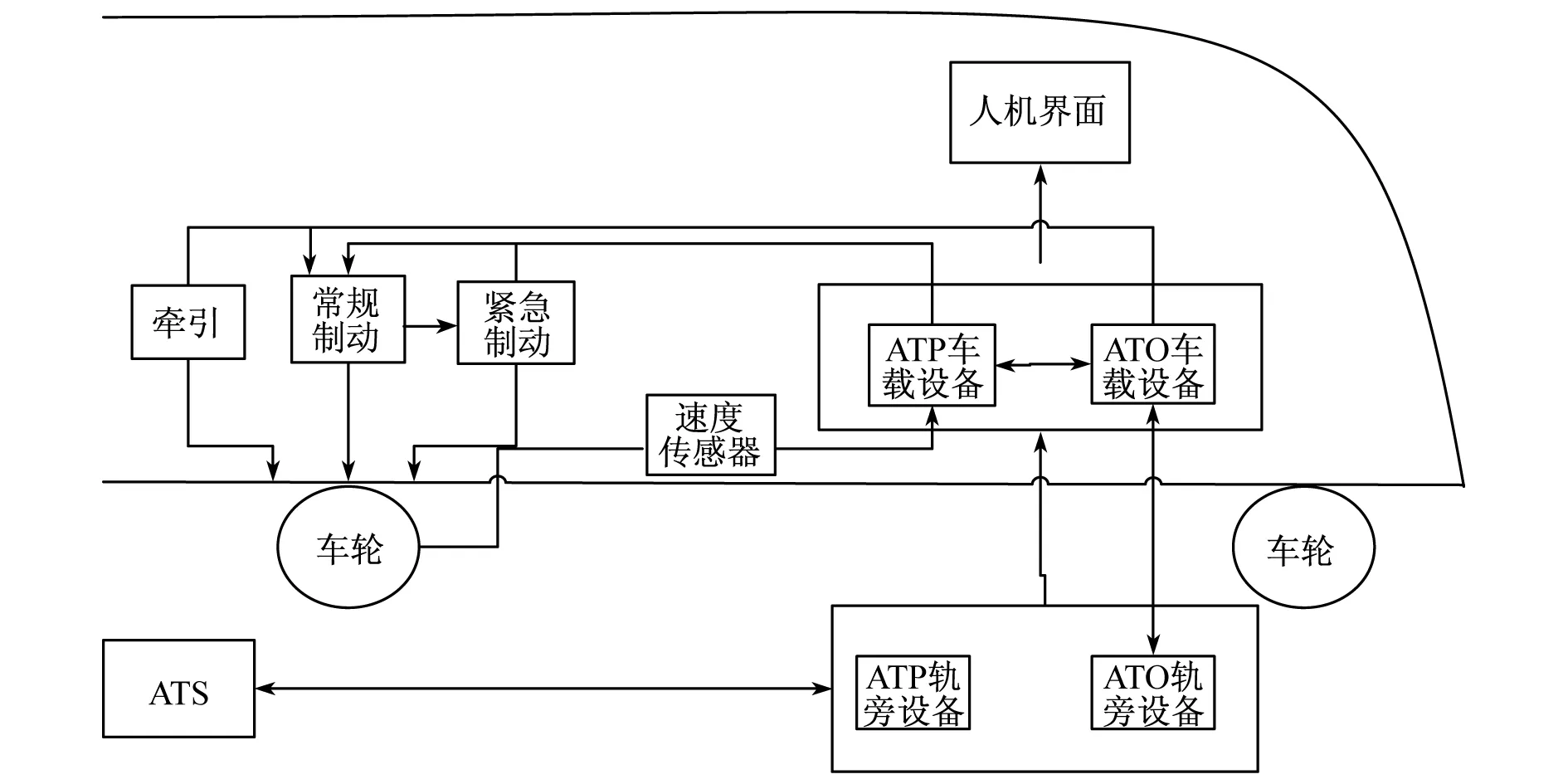
圖1 ATC系統原理示意圖
1.2 ATO系統的性能指標
ATO系統最主要的功能就是通過智能算法替代司機實現對列車速度的自動調整及站內定點停車,使列車能高效安全地運行。因此,對其控制算法的優劣進行評價至關重要。ATO系統控制算法評價一般參照以下幾項性能指標[7]:
(1) 追溯性。追溯性是指列車實際運行速度與目標速度的貼近程度。滿足追溯性要求時,控制算法既能保障列車的運行安全,又能提高列車的通過能力和運行效率。
(2) 準時性。在城市軌道交通系統中,列車的準時性對于保障線路的通暢運行來說是至關重要的。線路不同區段上的每列列車都有其運行時間,若前方列車誤點運行,將會直接導致后續列車的延誤,并最終打亂整個系統的運行作業。
(3) 停車精度。當車站配有屏蔽門時,停車的精度會直接影響車門和車站屏蔽門的相對位置。停車精度差時,會影響屏蔽門的正常開啟,導致乘客無法正常上下車。
(4) 舒適性。舒適性受線路情況、司機的操縱水平、車輛的構造及列車的運行模式等因素影響。為了提高列車乘坐舒適性,應盡量減少列車工況及檔位的切換次數,做到工況間及檔位間的平滑切換。
(5) 節能性。列車的能耗主要與牽引、制動、惰行策略相關。采用不同的ATO控制算法時,其相應的列車能耗大小也是不同。運行中,應當盡量減少不必要的過度牽引,并且在滿足運行時分的前提下盡可能提高惰行時間比例,以減少列車行駛過程中的制動時間。
2 ATO系統的控制算法
2.1 傳統PID控制算法
國外對PTD控制算法的研究起步較早。傳統PID控制器就是按照偏差的比例、積分、微分進行控制。具有算法簡單、穩定性好、可靠性高的特點。由于PID控制器設計簡單、適應面寬,現已成為過程控制中應用最廣泛的一類基本控制器,且對于各種線性定常系統的控制,尤其是被控參數固定的系統,都能獲得令人滿意的控制效果。傳統PID控制器的原理框圖如圖2所示。具體PID控制器表達式為:
(1)
式中:
c(t)——輸出量;
r(t)——輸入量;
Kp——比例增益;
Ki——積分增益;
Kd——微分增益。
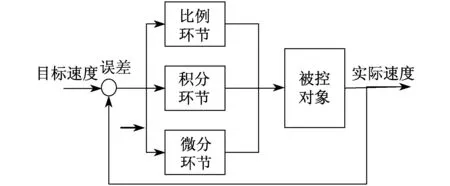
圖2 PID控制的原理框圖
2.2 模糊自適應PID控制算法
2.2.1 模糊控制原理
模糊控制器工作時,首先,將輸入的數字信號經過模糊化(D/F)變成模糊量,并送入含有模糊規則的模糊推理模塊(A*R),近似推理得出結論——模糊集合;然后,被清晰化模塊(F/D)變換成清晰量,再輸入到下一級去調節被控對象,使其輸出滿意的結果[7]。本文所采用的模糊控制器為Mamdani二維模糊控制器[8],其原理圖如圖3所示。圖3中,D/F可實現清晰量到模糊量的轉換運算;A*R可根據輸入模糊量進行近似推理運算,得出模糊量;F/D可實現模糊量到清晰量的運算。
圖3中,Ke、Kec及Ku的作用是對清晰值或模糊值進行比列變換。

注:Ke、Kec為量化因子,Ku為比列因子圖3 Mamdani二維模糊控制器原理框圖
2.2.2 模糊自適應PID控制算法的設計
對變量復雜,沒有確定的數學模型和規律可循的系統,傳統PID很難獲得滿意的控制效果。模糊控制能充分利用操作人員的實時非線性調節實踐操作經驗,對PID的參數進行實時調整,建立模糊自適應PID控制器。模糊自適應PID控制算法的原理是把輸入到PID調節器的偏差e和偏差變化率ec同時輸入到基于Mamdani二維模糊控制器;然后,對輸入量分別進行模糊化、近似推理和清晰化處理;最后,把計算出的修正量ΔKp、ΔKi、ΔKd輸入PID調節器中,并對PID的3個系數進行實時在線修正,從而更好地對被控對象進行控制。原理框圖如圖4所示。
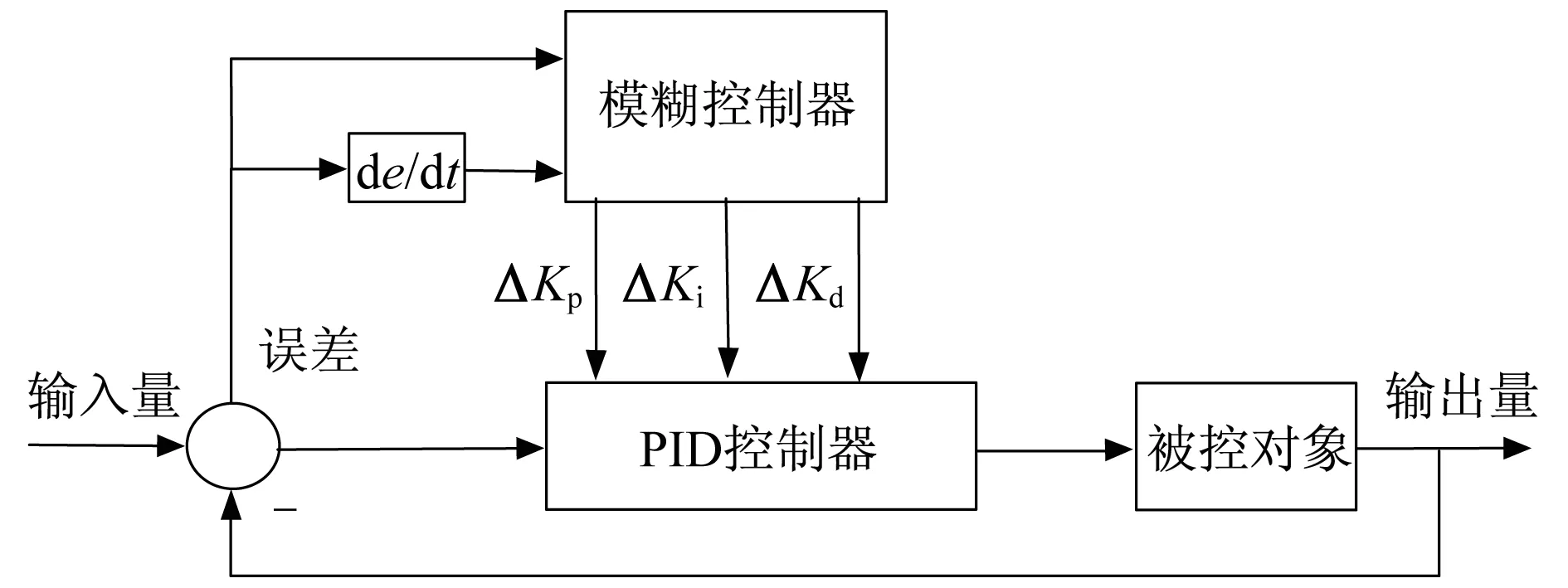
圖4 模糊自適應PID控制原理框圖

最后,模糊控制器修正的PID參數的實時取值分別為Kp+ΔKp、Ki+ΔKi、Kd+ΔKd。其中,Kp、Ki、Kd為PID控制器整定的初始值。結合上述規則和大量試驗數據分析,得出了ΔKp、ΔKi及ΔKd的模糊自適應規則,見表1~表3。

表1 ΔKp的模糊自適應規則
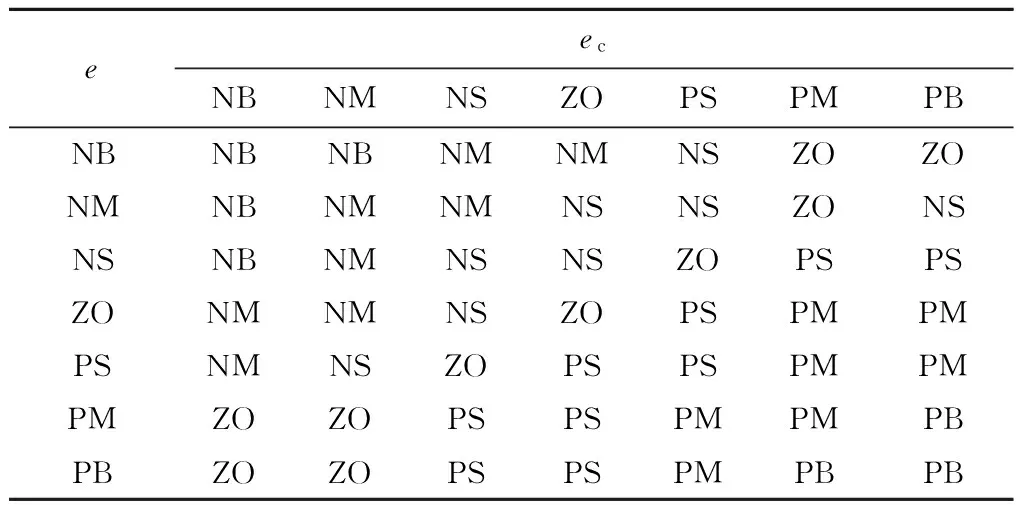
表2 ΔKi的模糊自適應規則

表3 ΔKd的模糊自適應規則
3 ATO系統的建模與仿真
3.1 仿真建模及仿真參數
在基于Matlab/Simulink的環境下搭建ATO系統的仿真模型,并建立傳統PID和模糊自適應PID算法的控制模塊,如圖5所示。
模糊自適應PID算法的建模思想是通過反饋列車的實際速度,并與目標速度比較,從而得到速度誤差e;將e微分得到誤差變化率ec(即加速度),把e和ec作為模糊控制器FC(Fuzzy Control)的輸入,通過知識庫里的模糊控制規則來實時修正PID控制器的參數Kp、Ki及Kd,從而實現對列車速度的實時控制。
在模糊化模塊中,將模糊輸入語言e、ec以及輸出控制量u均劃分為7個模糊子集(負大,負中,負小,零,正小,正中,正大)。由于目前還沒有成熟的方法來確定隸屬函數,主要還是停留在利用經驗的基礎上。因此,本文選取應用最廣的三角形隸屬函數作為e、ec、u的隸屬函數。
在清晰化模塊中,常用的清晰化方法有最大隸屬度法、面積重心法和加權平均法等[10]。綜合考慮實際試驗效果等多方面因素,本文最終采取面積重心法。
兩種列車運行的控制算法所采用的仿真參數中,PID參數的初始值Kp=20,Ki=3.24,Kd=99.9;速度誤差e的模糊論域為[-3,3],物理論域為[-10,10];加速度誤差ec的模糊論域為[-6,6],物理論域為[-2,2];輸出控制量u的模糊論域為[-10,10],物理論域[-15,15];量化因子Ke=0.6,Kec=1.5,比例因子Ku=10。
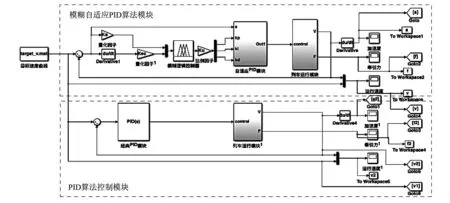
圖5 兩種算法的控制模型
3.2 仿真條件
正常工況下的無限速運行環境,對于目標曲線的生成及跟蹤能力的要求較低,難以真實反映ATO系統性能的優劣。故本文采用限速工況下的列車運行環境作為仿真條件,以增加運行控制的難度,從而達到檢測控制算法優劣的目的。具體的線路運行要求如下:
(1) 列車在運行距離為2 187 m、運行時間為166.6 s的條件下限速運行。
(2) 將限速等級劃分為三個層次:在0~900 m區段,列車的限制速度為80 km/h;在900~1 200 m區段,列車限制速度為60 km/h;從1 200 m起,列車的限制速度為70 km/h。
(3) 列車從1 800 m處開始施加制動力,直至列車平穩停靠。根據上述要求仿真生成的目標速度曲線和ATP速度曲線如圖6所示。
3.3 仿真結果分析
采用傳統PID算法、模糊自適應PID 算法對列車目標速度曲線進行跟蹤控制,并結合ATO系統的5個性能指標進行比較分析,擬評價出相對智能高效的控制算法。仿真結果如圖7~12所示。
根據上述仿真結果,分別從不同性能指標對兩種算法的控制性能進行比較分析。
(1) 追溯性。從圖7、圖9和圖10可以看出,在PID控制下,ATO系統跟蹤目標速度曲線的能力較弱;在70~105 s的減速、惰行和加速階段,列車的實際速度曲線與目標速度曲線之間波動較大,超調嚴重,威脅到列車駕駛的安全性,追溯性較差。在模糊自適應PID控制下,ATO系統的速度跟蹤能力較PID控制有了明顯改善;在加速、惰行和減速階段速度曲線更加平滑,不再出現大幅振蕩;整個運行階段實際速度曲線與目標速度曲線貼合度較高,ATO系統的安全性和追溯性有了極大提高。
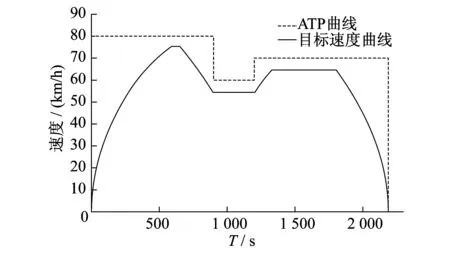
圖6 列車運行的ATP速度曲線和目標速度曲線
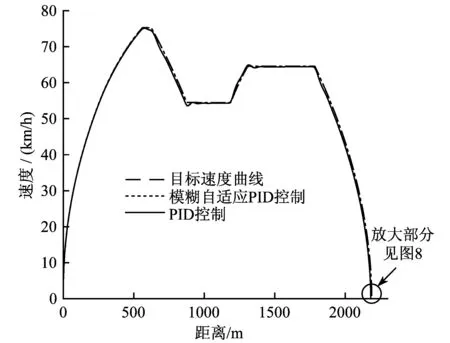
圖7 列車運行的速度-距離曲線
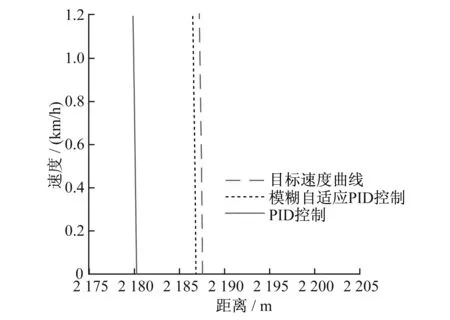
圖8 速度-距離曲線局部放大圖
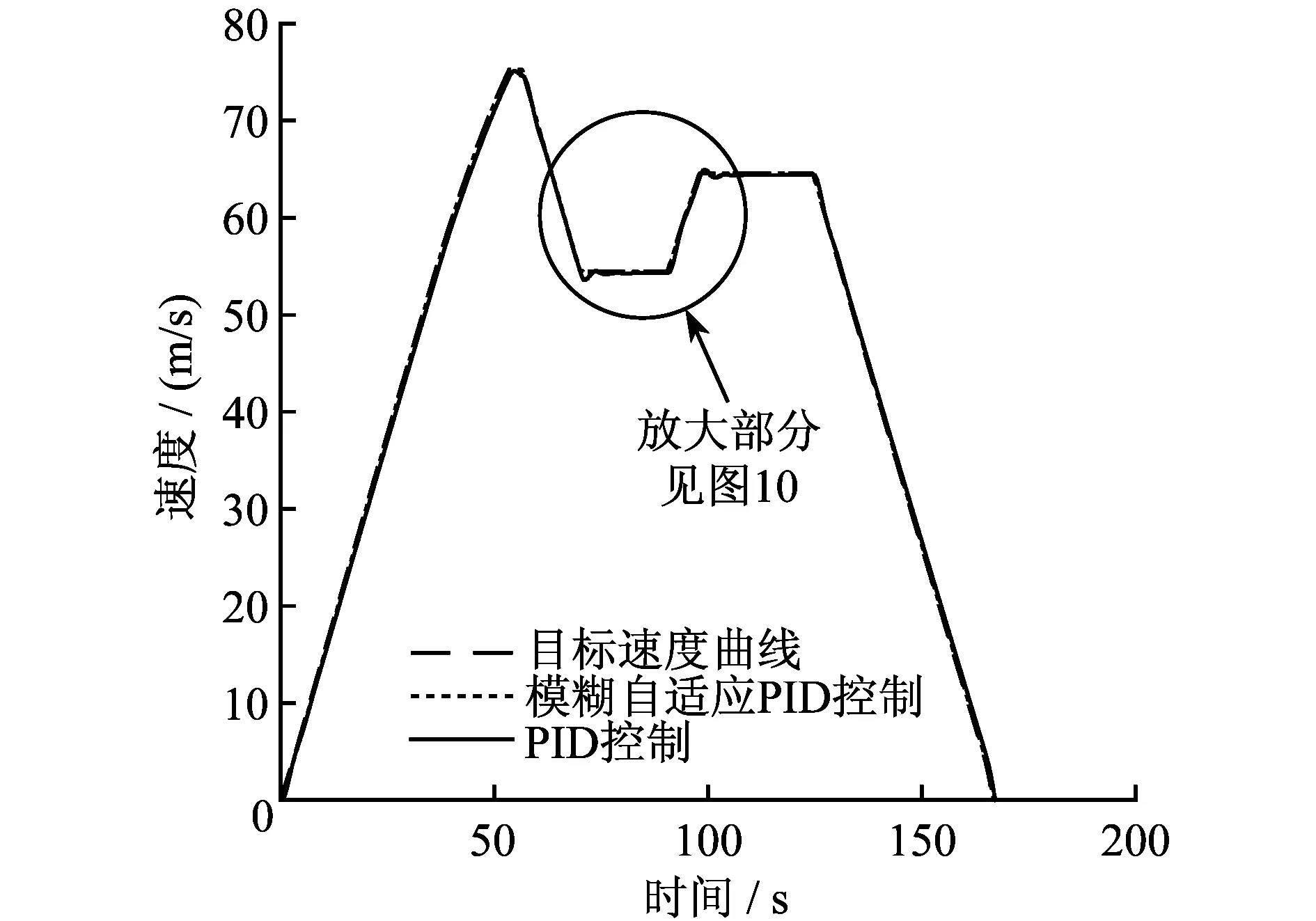
圖9 列車運行的速度-時間曲線圖

圖10 速度-時間曲線局部放大圖

圖11 加速度變化曲線
(2) 準時性。由圖9可知,PID控制下的列車實際運行時間為167.2 s,誤差為0.6 s;模糊自適應PID控制下列車的實際運行時間為166.8 s,誤差為0.2 s。可見后者的準時性較好。
(3) 停車精度。由圖8可知,PID控制算法下列車實際運行距離為2 180.22 m,誤差達到6.78 m,完全超過列車±0.3 m停車精度要求。在模糊自適應PID控制算法下,列車實際運行距離為2 186.55 m,誤差為0.45 m。雖然精度還有待提高,但相比PID控制的停車精度已經有了很大改善。
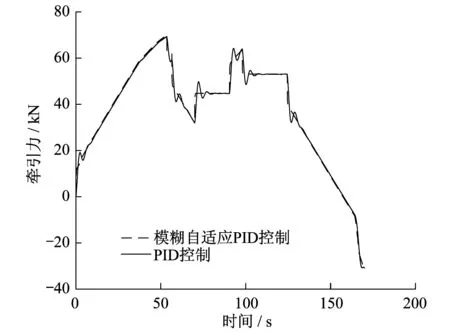
圖12 牽引力變化曲線
(4) 舒適性和節能性。根據圖11、12可知,與傳統PID算法相比,模糊自適應PID算法能很好地對列車牽引力和加速度進行控制。在工況切換時,前者的牽引力和加速度曲線波動明顯,超調嚴重,乘客舒適性和列車節能性較差;后者的牽引力和加速度曲線在工況發生改變時依然十分平滑,曲線幾乎沒有振蕩,列車的牽引系統和制動系統不需要頻繁切換,舒適性和節能性有了明顯改善。
綜上所述,模糊自適應PID控制比傳統PID控制的動態響應更快,超調更小,其魯棒性更好,穩態精度更高,滿足ATO系統停車精度、追溯性、準時性、節能性及舒適性等性能指標的要求。
4 結語
智能高效的ATO控制算法是實現列車自動駕駛的關鍵所在。本文在傳統PID算法的基礎上,結合模糊控制和PID控制的優點,提出模糊自適應PID控制算法,將其運用在列車ATO系統中,并對目標速度曲線進行跟蹤控制,對其控制性能與傳統PID算法從停車精度、追溯性、準時性、節能性、舒適性等方面進行評價。仿真結果表明,對于一個復雜非線性的列車控制對象,模糊自適應PID控制算法具有良好的控制效果,基本彌補了PID控制器的不足,穩態精度高,魯棒性好,滿足ATO系統的各個性能指標要求。然而,由于模糊控制模塊的參數是通過大量試驗結合模糊控制規則在合理范圍內所取的最優參數,沒有經過精確的數學計算驗證,因此,后續還需要更深一步研究,以獲得更理想的效果。
[1] 徐濤.遺傳算法在優化告訴列車自動駕駛中的應用[J].城市軌道交通研究,2014(3):59-60.
[2] 支柱,劉紅璐.城市軌道交通ATO系統自動速度控制功能的仿真實現[D].北京:北京交通大學,2007:514-515.
[3] 康太平.基于模糊預測控制的列車自動駕駛系統研究[D].成都:西南交通大學,2003:9-14.
[4] 賈利民.列車運行過程的智能控制[J].中國鐵道科學,1992,13(1):65-78.
[5] 姚理.基于智能控制算法的列車自動駕駛系統的優化研究[D].北京:北京交通大學,2009:36-38.
[6] 王義惠,寧濱,宋永端.高速列車制動及牽引自動控制研究[J].控制工程,2010(S1):5-8.
[7] 饒曉璐.列車自動駕駛算法研究及仿真實現[D].成都:西南交通大學,2010.
[8] 李國勇,楊麗娟.神經·模糊·預測控制及其MATLAB實現[M].北京:電子工業出版社,2013:187-215.
[9] 曾光奇,胡均安,王東,等.模糊控制理論與工程應用[M].武漢:華中科技大學出版社,2006:92-93.
[10] 諸靜.模糊控制理論與系統原理[M].北京:機械工業出版社,2005:192-195.
ATO System Control Algorithm Based on Fuzzy Adaptive PID
LIU Hao, QIAN Cunyuan, SHI Zhaodong
In order to research on the intelligence and efficiency of urban rail transit ATO system, by taking the non-linear and complex of train system into consideration on the basis of traditional PID control algorithm, and combined with the advantages of fuzzy control theory that can be adjusted in the real-time non-linear system, the fuzzy adaptive PID control algorithm is proposed, simulation models of ATO system and algorithm control module are established in Simulink. The two algorithms are applied to the ATO system to track the target speed curve, analyze the control performances of the two algorithms from five aspects of precision of parking, traceability, punctuality, energy-saving,degree of comfort. imulation results show that ATO system can perfectly satisfy the five performance requirements under the control of fuzzy adaptive PID algorithm.
ATO (automatic train operation); PID(proportion integration differentiation) control algorithm; fuzzy adaptive PID; targets peed curve
Institute of Railway and Urban Rail Transit, Tongji University,201804,Shanghai,China
*國家科技支撐計劃項目(2015BAG19B02)
U 231.6
10.16037/j.1007-869x.2017.03.009
2015-11-29)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
福建輕紡(2022年4期)2022-06-01 06:26:06
現代儀器與醫療(2021年2期)2021-07-21 02:19:12
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
建筑熱能通風空調(2018年5期)2018-07-09 03:16:38
池州學院學報(2017年3期)2017-10-16 01:38:35
家庭影院技術(2017年9期)2017-09-26 03:41:45
