北斗授時與定位技術在綠色能源開發利用中的應用研究
2017-03-27 17:13:22彭一春馬索菲婭
科技創新與應用 2017年7期
彭一春+馬索菲婭
摘 要:太陽能以其不竭性和清潔環保優勢已成為當今國內外最具發展前景的綠色能源之一。文章建立了視日運動軌跡模型,結合北斗授時與定位技術、設計了雙軸自動跟蹤太陽運行軌跡的系統。此系統中北斗模塊實時快速獲取觀察點的時間、日期和經緯度,控制芯片利用模型計算出太陽的高度角、方位角和日出、日落時間,進而驅動步進電機使太陽能電池板始終垂直對準太陽光入射方向,完成自動跟蹤,這能顯著提高太陽能利用率,并且在日落后能夠自動復位以減少機械損耗,在能源越來越短缺和溫室效應不斷擴大的今天,具有極高的經濟意義,生態意義和社會意義。
關鍵詞:北斗;授時;定位;跟蹤
1 研究背景及意義
綠色能源和可持續發展問題是二十一世紀人類面臨的兩個重大課題,而能源問題將更為突出。因為目前的環境問題,很大程度上是由于化石能源過度開發利用造成的。因此,人類要解決上述能源問題,實現可持續發展,只能大規模地開發利用可再生的清潔能源。太陽能作為一種取之不竭、安全無污染的綠色新能源將會在二十一世紀得到前所未有的發展。但太陽能存在著密度低、不穩定、光照方向和強度隨時間不斷變化的問題,極大地降低了太陽能的利用效率,如何充分利用太陽能,提高太陽能利用率,已成為大家研究的熱點。將太陽能轉換成電能或熱能成為各國科學界研究的熱點和產業界開發、推廣的重點。實踐證明,太陽跟蹤技術是提高太陽能利用率的最簡單而有效的途徑之一[1]。衛星定位導航系統具有高精度的授時定位和測速能力,在工業、農業,國防科技等領域得到了廣泛的應用。目前我國的定位導航系統大多數都是基于GPS(Global Positioning System)技術的,而GPS是由美國軍方控制的軍民共用系統,雖然現在對全世界開放,但是并未承諾各國可以一直免費使用,如果GPS衛星導航系統不能正常使用,將給我們帶來巨大影響和損失。我國獨立自主研制開發的北斗衛星導航系統也具有精確定位、精密授時、短報文通信能力、容納用戶量大四大功能[2],更重要的是我國自主獨立開發的,其可控性、可依賴性和安全性更有保障。
2 設計方案原理
在光伏應用方面,太陽跟蹤就是使太陽能電池板隨時依照太陽的運動作相應的轉動,使太陽光的入射光線實時都是垂直照射太陽能電池陣列表面,其單位面積上的輻射能接收最大,因此可以提高太陽能利用率。要實現完全跟蹤太陽的運行軌跡,有效的保證太陽能電池板能夠時刻正對太陽,太陽能電池板就必須能夠在水平和豎直兩個方向都能運動,即要采用雙軸太陽跟蹤。通常的太陽能雙軸追蹤方法有光電式跟蹤和視日運動軌跡跟蹤2種。
光電式跟蹤的優點是結構設計較為簡單,靈敏度和精確度都比較高。最大的缺點是受天氣情況的影響比較大,例如:在陰天或者多云的天氣,太陽能電池板上的探測器稍微有一段時間接收不到一定強度太陽光線,導致跟蹤系統無法識別正確太陽位置,也就不能正確的跟蹤太陽。而視日運動軌跡跟蹤的優點是在全天候都可以正常工作,不怕陰天、雷雨、多云等各種惡劣天氣的影響,其缺點是由于運用的視日運動軌跡模型本身就存在一定累積誤差,而且一般不能自身消除,所以隨著時間的推移,跟蹤精度越來越低。在本方案我們采用的是視日運動軌跡跟蹤方法,但對傳統的視日運動軌跡模型進行修正,結合北斗系統定位準確、精確授時等優點,能夠有效改進依靠傳統的天文日立法運行的視日運動軌跡跟蹤的累積誤差大、跟蹤精度低等缺點。
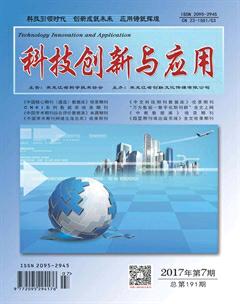
視日運動軌跡的雙軸跟蹤方式,分為極軸式和高度角~方位角式。極軸式這種跟蹤方式由于太陽能電池板的重心不通過極軸軸線,極軸支承裝置的機械設計比較困難,耐久性能差。因此我們設計的是高度角~方位角式跟蹤,在這系統中確定太陽的位置是實現跟蹤的關鍵因素之一。我們采用地平坐標系來描述太陽位置,相對于觀察點,太陽的位置通常用高度角和方位角兩個坐標決定(如圖 1所示)。先根據地球與太陽的相對運動規律,建立太陽方位角和高度角與經緯度、日期和時間的數學模型,計算出太陽的位置,然后由程序控制使跟蹤裝置隨著太陽的位置變化而轉動,隨時對準太陽,完成跟蹤。在地平坐標系中規定太陽能電池板所在點為坐標原點O,正南方為X軸,正東方為Y,水平面的垂直方向為Z軸。太陽高度角αs是觀測點O到太陽S的連線與其水平面上的投影線的夾角,取值范圍是0°~90°。太陽方位角γs,是太陽與坐標原點連線水平面上的投影與X軸的夾角,并規定正南方為零度,順時針方向為正,逆時針方向為負,取值范圍是-180°~+180°。太陽高度角和太陽方位角不僅與太陽能電池板的地理位置有關,而且也與時間有關。這里的時間用太陽時角ω表示,變化周期為一晝夜,規定正午時ω=0°凌晨至正午ω<0°,正午至午夜ω>0°,時角范圍為-180°?ω?180°。
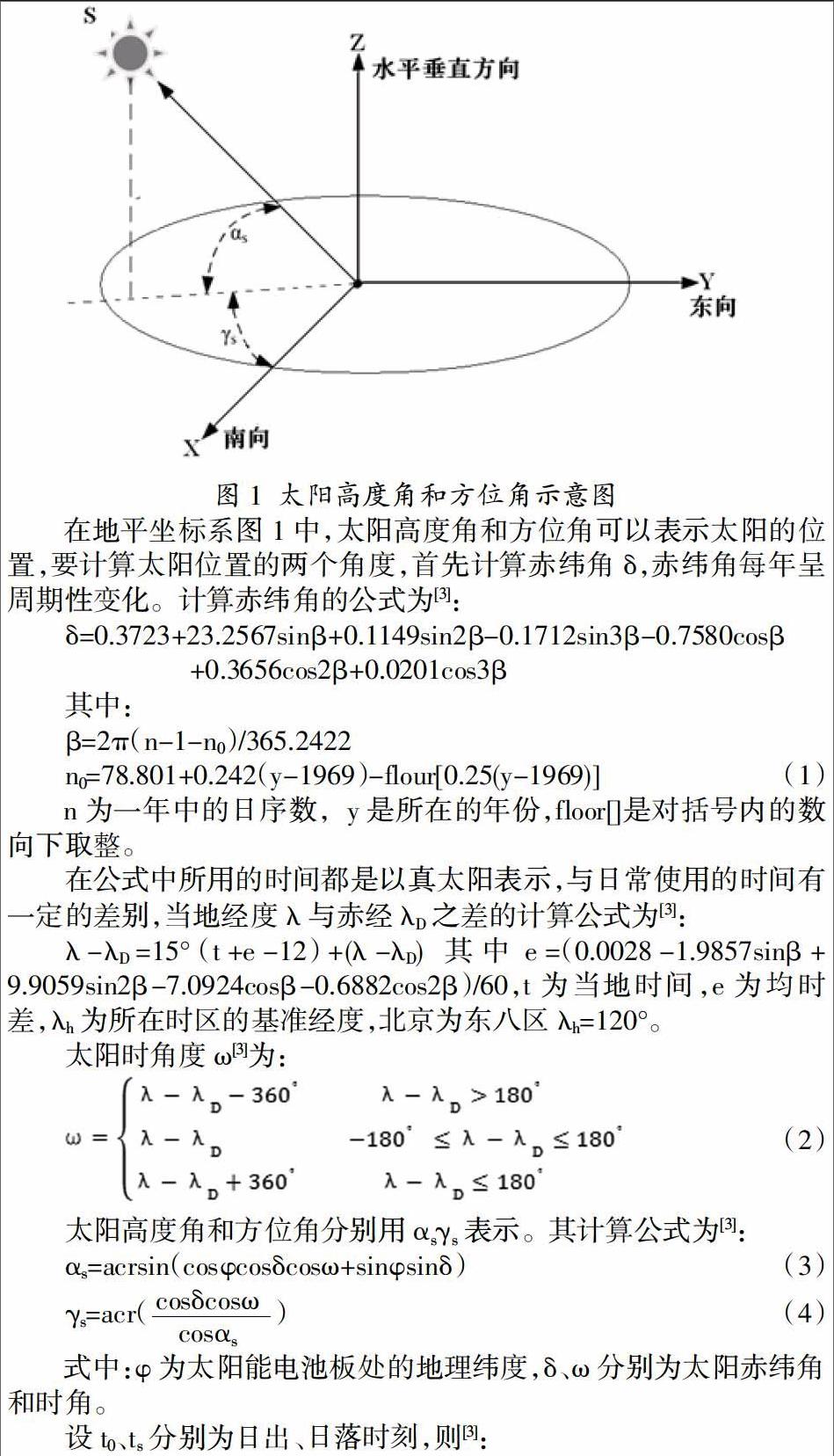
由北斗系統提獲取太陽能電池板處的緯度、日期、時間再根據上面推導出的視日運動軌跡模型的公式(1)-(5),可以計算出此時此刻確定太陽位置的兩個參數-太陽高度角和方位角,再通過控制芯片系統給步進電機驅動器發送相應的信號,然后驅動器分別給水平和垂直步進電機發送對應的指令,使太陽能電池板始終和太陽光線垂直,實現跟蹤。圖2為系統總體程序設計框架圖。
3 系統結構設計及運行流程
本系統主要包括北斗信息接收與處理模塊、控制芯片模塊和步進電機驅動模塊、2個步進電機、2個角位置傳感器組成的反饋系統模塊等部分構成。圖3為自動跟蹤太陽能電池板平臺框架示意圖。圖4為系統數據流程示意圖。
北斗信息接收與處理模塊可以在短時間內處理和提取位置坐標和時間等信息。控制芯片通過視日運動軌跡模型公式(1)~(5)和北斗系統發來的坐標和時間參數,可得到太陽能電池板所在位置的太陽高度角和太陽方位角。太陽能電池板是固定不動的,即O點是固定的。OK是電池板的中垂線,設OK連線的方向即是目前電池板的朝向(如圖5所示)。S點是太陽的相對位置。當O,K,S三點共線時電池板正對太陽,當S點偏離OK連線時控制芯片將偏差信號以脈沖信號的形式傳遞給步進電機驅動模塊,步進電機驅動把這種脈沖信號轉化成角位移和線位移,再傳遞給步進電機帶動電池板朝太陽運動方向運動,直至重新正對太陽。對于偏差的角度信號可以分解為在地平坐標系中的太陽高度角αs與當前的高度角αk之間的差值以及太陽方位角γs與目前方位角γk之間的差值。通過水平和垂直轉軸的偏轉使Δα=|αs-αk|和Δγ=|γs-γk|逐步減小,一直到Δα和Δγ為零,即O、K、S三點共線,使太陽能電池板始終對準太陽光入射方向。
4 結束語
北斗衛星導航系統是中國自主研發的衛星導航系統,在國民經濟建設和國防軍事方面都有非常重大的意義。強調低碳環保生活的今天,綠色能源越來越受人們廣泛關注,太陽能作為綠色能源,逐漸受到人們的重視,考慮到太陽能的采集制作成本高,利用效率低的缺點,結合北斗系統授時定位的功能,建立了視日運動軌跡模型,設計了雙軸自動跟蹤太陽運行軌跡的系統。該雙軸裝置利用北斗系統的定位授時功能,得到太陽能電池板所在的準確地理位置及精確的時間信息,通過控制芯片計算太陽的高度角和方位角,通過角度傳感器反饋電池板實時高度角和方位角,將兩個角度的變化反饋到控制系統,不斷地得出太陽光入射角度相對太陽能電池板的角度變化,利用控制芯片計算并輸出脈沖串,控制步進電機使太陽能電池板始終垂直于太陽光的入射方向,這樣在電池板固定的面積上能夠盡可能多的接收到太陽能,這樣可以使太陽能得到最大利用。這系統方案在光伏和光熱等領域都可以適用,特別適合天氣變化比較復雜和無人值守的情況,其能促進太陽能發電和熱能利用在能源領域的廣泛使用,有較好的推廣應用價值。
參考文獻
[1]汪春華,王曉麗,李彬.高精度太陽能聚光雙軸定時跟蹤控制系統設計[J].電子設計工程.2012,20 (4):91-93.
[2]楊元喜,李金龍,王愛兵,等.北斗區域衛星導航系統基本導航定位性能初步評估[J].2014,44(1):72-81.
[3]王國安,米鴻濤,鄧天宏,等.太陽高度角和日出日落時刻太陽方位角一年變化范圍的計算[J].氣象與環境科學,2007,30(B09):161-164.
作者簡介:彭一春(1977-),女,碩士,副教授,主要從事土木工程材料及其檢測。