一種挖掘機作業手柄自動操縱機構的設計與分析
2017-03-25 05:28:13廖明涂群章蔣成明陳青鄭偉杰
裝備制造技術 2017年1期
廖明,涂群章,蔣成明,陳青,鄭偉杰
(解放軍理工大學野戰工程學院,江蘇南京210007)
一種挖掘機作業手柄自動操縱機構的設計與分析
廖明,涂群章,蔣成明,陳青,鄭偉杰
(解放軍理工大學野戰工程學院,江蘇南京210007)
利用擺動導桿原理將兩個擺動導桿機構垂直交叉組合,設計了一種某型挖掘機作業手柄操縱機構。基于Matlab/simulink建立了機構橫向擺動過程的數學模型,完成了運動學分析。運用ADAMS軟件對手柄操縱機構的操縱工況進行了動力學仿真分析,驗證了機構設計的合理性。
操作手柄;機構設計;運動仿真
工程機械經常需要在一些工作環境較為惡劣甚至危險的場合進行作業,如搶險救災、排雷排爆、核能化工污染區作業等,這類工作環境嚴重威脅駕駛員的身體健康和生命安全。本文研制一種可安裝于工程裝備駕駛室內的遙控駕駛機器人,將駕駛員從高危作業環境中解放出來,實現工程機械的遙控操縱具有十分重要的意義。作業手柄操縱機構是整個駕駛機器人機構的核心之一。本文以挖掘機為例,設計了一種挖掘機作業手柄自動操作機構,并對其進行運動學和動力學分析。
1 作業手柄操縱機構設計
1.1 手柄運動分析
挖掘機作業過程中,駕駛員需要對左右兩個作業手柄進行前、后、左、右的單向操縱和協調操縱以實現對駕駛室回轉平臺、鏟斗、動臂和斗桿的聯合控制。如圖1所示,令OP為作業手柄,其中O為手柄與駕駛室的鉸接點,P為手柄操縱機構在作業手柄上的夾持點,作業手柄的工作空間為以鉸接點O為球心,在XY兩個方向擺動的空間夾角∠POZ≤30°的球面區域,手柄操作力需求約為25 N.

圖1 作業手柄工作空間
1.2 操縱機構運動簡圖設計
為了實現挖掘機手柄運動要求,設計了作業手柄操縱機構,其運動簡圖如圖2、圖3所示,其中,圖2為縱向擺動導桿機構運動簡圖,圖3為橫向擺動導桿機構運動簡圖,縱向擺動電機的轉動將帶動手柄在XOZ平面內擺動,橫向擺動電機的轉動將帶動手柄在YOZ平面內擺動。

圖2 縱向擺動(XOZ平面內)連桿機構運動簡圖
縱向擺動的輸入為電機轉動,輸出為手柄繞支點的擺動,縱向擺動電機帶動縱向擺動主動桿擺動,經由平移夾持裝置帶動手柄擺動[1]。
橫向擺動的輸入、輸出與縱向擺動相同,但結構不同。如圖3所示。
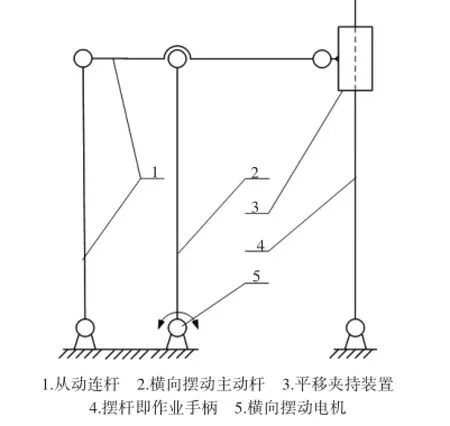
圖3 橫向擺動(YOZ平面內)連桿機構運動簡圖
將縱向擺動連桿機構與橫向擺動連桿機構進行組合,設計出空間擺動導桿式手柄操縱機構,圖4為基于上述原理,在Creo環境下構建的手柄操縱機構模型。當縱向擺動電機8轉動時,運動經由縱向擺動主動桿1、連桿4、銜接裝置3、手腕結構5和平移夾持裝置6傳遞給作業手柄,此時,兩橫向擺動主動桿為從動桿,手腕結構的作用是實現機構縱向擺動時連桿能夠繞自身軸線的轉動,而當橫向擺動電機轉動時,縱向擺動主動桿作為從動桿。

圖4 作業手柄操縱機構建模
2 手柄操縱機構運動學分析
對手柄操縱機構而言,主要研究機構末端的角位移、擺動速度、擺動加速度相對于運動時間的關系,機構的運動學分析能夠為機械運動性能和動力性能研究提供必要的依據,是實現機構運動控制的基礎[2]。以橫向擺動為例,對機構進行運動學分析,縱向擺動運動學分析與此類似。
機構橫向擺動運動簡圖如圖5(a)所示,M為平移頭與平移座的接觸點,σ為平移頭與平移座的接觸點中心與手柄支點O1的連線與Y軸的夾角,P點為平移頭與平移座的接觸點在手柄上的垂直點,令橫向擺動傳動軸轉角為αh,手柄在橫向平面內的擺動角為θh.對機構擺動過程進行分析易得,調整連桿AN的長度對手柄的角位移沒有影響,故在對機構的橫向擺動過程進行運動分析時,可以將基點O2等效移動到O'2處,機構運動過程中的位置關系如圖5(b)所示。記O1O'2與Y軸的夾角為φ,將O1O'2記為l1,記O'2N為l2,記MN為l3,記O1M為l4,規定由X軸負方向旋轉到矢量的矢量端順時針為正[3]。

圖5 橫向擺動運動簡圖
則根據圖5(b)可建立矢量方程式:

分別得到矢量方程的在X方向和Y方向的分量表達式:

將(2)(3)式對時間求一階導數后得:
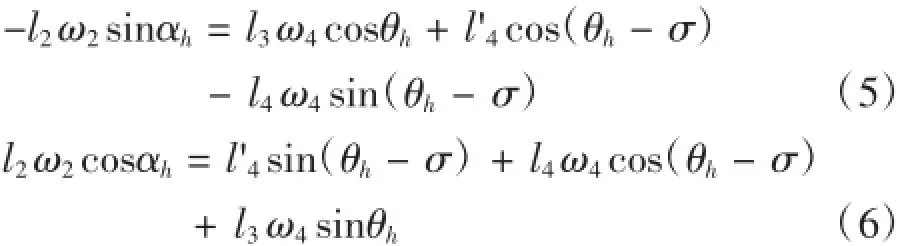
假設橫向擺動主動桿的角速度ω2為已知,則將(5)(6)式轉化為矩陣形式并進行整理變換即解得手柄橫向擺動角速度正解:

將(5)(6)式再次求導可得:
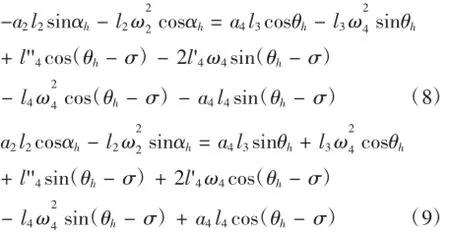
假設縱向擺動主動桿的角加速度a2為已知,則將(8)(9)式轉化為矩陣形式并進行整理變換即解得手柄操縱機構縱向擺動角加速度的正解:
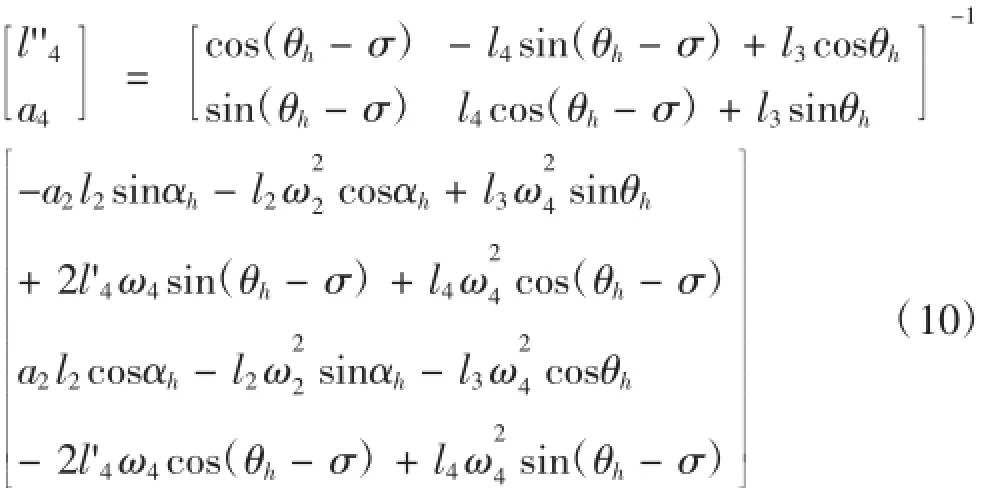
設運動初始狀態下αh=0,a2=0且ω2=π/6,單位rad/s,又已知l1=82 mm,l2=180 mm,l3=31 mm,運用MATLAB的fsolve函數對式(2~4)進行6次迭代計算,解得θh=0.464 3 rad,l4=243.836 mm,σ=0.139 9 rad.
在求得θh、l4和σ的基礎上,根據式(10)編制M函數“hengbai”,在simulink系統中建立計算模型,如圖6所示,對各積分器設置初始值,令仿真時間為6 s,并進行計算。

圖6 橫向擺動運動學計算模型
“hengbai”數據表中從上至下依次為仿真時間t、αh、l4、l'4、l''4、θh、ω4、α4和eta.運用plot(hengbai.signals. Values(:,1),hengbai.signals.value(:,i))(i=3,6,7,8)指令,分別繪制l4、手柄與水平面的夾角θz、手柄擺動角速度ω3和手柄擺動角加速度α3與時間t的關系,如圖7所示。
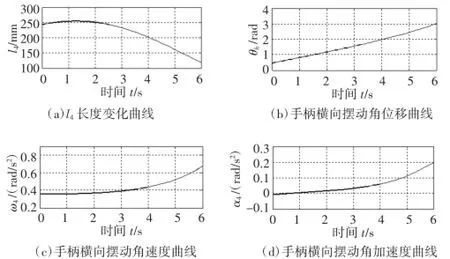
圖7 手柄橫向擺動運動學分析
圖7 (a)即為安裝在操縱手柄上的夾持機構在手柄上做直線滑動的位移曲線,可以為實際安裝機構提供依據。由圖7(b~d)可以看出機構操縱手柄的擺動速度平滑,擺動軌跡滿足作業手柄運動要求。
3 手柄操縱機構動力學分析
3.1 動力學建模
將Creo中的關鍵零件的準確模型通過Parasolid格式轉換成ADAMS中的部件,并設置好相應的計算單位、重力方向,再給每個導入的部件設置質心、約束連接點MARKER以及質量等重要參數,通過對零件的旋轉、平移等操作,將零件移動至相應的全局坐標,最后在部件之間存在球鉸連接、平面鉸接、平移等約束的連接點處添加約束副,完成挖掘機手柄操縱機構在ADAMS中的建模[4],如圖8所示。
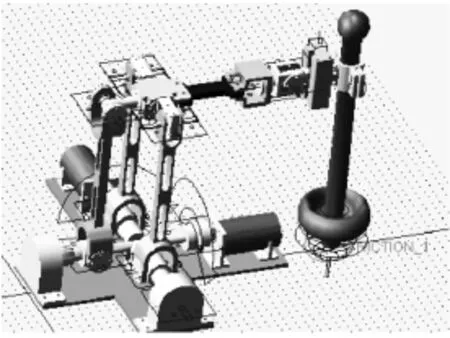
圖8 挖掘機手柄操縱機構ADAMS模型
為分析挖掘機手柄操縱機構在極限擺角情況下各關鍵關節的載荷情況和驅動電機的輸出轉矩,模擬挖掘機做“挖掘—回轉—卸土”作業時右先導作業手柄的動作,確定手柄操縱機構的操縱步驟[5-6],如圖9所示,其中,挖掘過程中還包含了斗桿的擺動動作,抬升大臂和卸土之間包含回轉動作,這些操作由左先導作業手柄操縱。

圖9 挖掘工況下右作業手柄操作流程
將手柄的角位移曲線生成.txt文件導入ADAMS中生成樣條曲線SPLINE_1和SPLINE_2,在ADAMS模型中的手柄與ground的球鉸支點處利用函數表達式AKISPL(time,0,SPLINE_1,0)*1d設置手柄的general_motion_1,如表1所示。
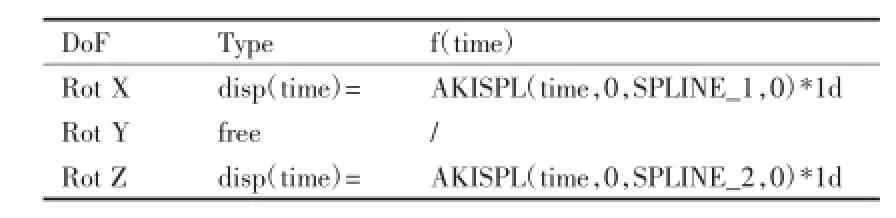
表1 手柄運動函數
設置好仿真時間和步長,進行仿真,得出縱、橫向擺動驅動電機的輸出軸角度變化曲線,如圖10所示。

圖10 縱、橫向擺動驅動電機的轉角變化曲線
刪除作業手柄支點處初始運動general_motion_1,用同樣的方法將驅動電機轉角變化曲線導入到ADAMS中,生成樣條曲線SPLINE_3和SPLINE_4,分別在兩驅動電機輸出軸與傳動軸之間的鉸接副上添加motion,再次利用AKISPL函數設置縱、橫向擺動驅動電機的motion,在運行仿真前,還要根據駕駛裝置技術指標設置手柄支點處的阻力轉矩。設置仿真時間與步長,進行仿真,觀察兩驅動電機的轉速變化過程和輸出轉矩[7]。
3.2 仿真結果分析
電機的轉速變化和輸出轉矩曲線分別如圖11和圖12所示。
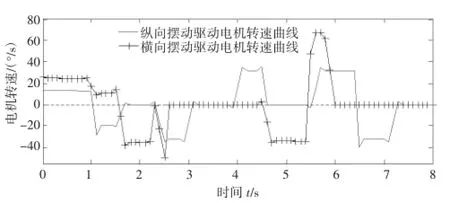
圖11 驅動電機轉速曲線
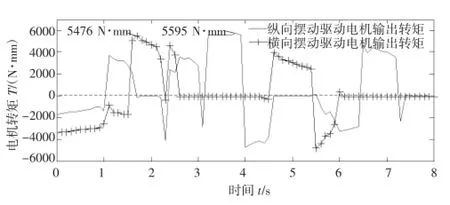
圖12 驅動電機輸出轉矩曲線
由電機轉速曲線、輸出轉矩曲線得,在手柄操縱機構操縱右先導作業手柄完成“挖掘—回轉—卸土”作業過程中縱向擺動驅動電機最大轉速約為35.59°/s,橫向擺動驅動電機最大轉速約為67.85°/s,縱向擺動驅動電機最大輸出轉矩為5 595 N·mm,橫向擺動驅動電機最大輸出轉矩為5 476 N·mm.根據以上結果,可以對驅動電機進行選型設計,本挖掘機手柄操縱機構采用57BYGH280-3004型步進電機搭配減速比為4:1的行星減速器。
4 結束語
手柄操縱機構根據擺動導桿原理能夠實現對挖掘機作業手柄的控制,可操縱作業手柄在工作空間內XY兩個方向上擺動。通過運動學分析和動力學仿真得到了電動機轉動角度和擺動手柄擺動角度的關系,模擬了挖掘機作業手柄工作過程,為控制系統的設計提供了依據。
[1]陳剛.汽車排放耐久性試驗用駕駛機器人開發[D].重慶:重慶大學,2006.
[2]蘇有良.偏置擺動導桿機構的解析設計與運動仿真[J].機械設計,2013,30(10):21-24.
[3]李新成,樊琳,張振.擺動倒桿機構的MATLAB運動學仿真[J].機械研究與應用,2008,21(1):94-99.
[4]賈雪峰.基于虛擬樣機的4DOF碼垛機器人分析與仿真驗證[D].泰安:山東農業大學,2014.
[5]楊揚.液壓挖掘機工作裝置動力學分析與控制系統研究[D].哈爾濱:哈爾濱工業大學,2013.
[6]盧偉,陳浩,王玲,等.拖拉機駕駛機器人換擋機械手運動分析[J].農業機械學報,2016,47(1):37-44.
[7]李婷婷.車輛傳動試驗臺自動換檔機械手的設計及實現[D].北京:北京交通大學,2008.
Design and Analysis of the Automatic Operation Mechanism of the Operating Handle of the Excavator
LIAO Ming,TU Qun-zhang,JIANG Cheng-ming,CHEN Qing,ZHENG Wei-jie
(College of Field Engineering,PLA University of Science and Technology,Nanjing Jiangsu 210007,China)
The design of the operating mechanism of a certain type of excavator is accomplished by using the principle of the swing guide-bar to cross the two swing guide-bar mechanisms.Based on Matlab/simulink,the mathematical model of the mechanism of lateral swing process is established,and the kinematic analysis is completed.Using ADAMS software,the dynamic simulation analysis of the operating conditions of the handle control mechanism is carried out,and the rationality of mechanism design is verified.
operating handle;mechanism design;motion simulation
TH113.2
:A
:1672-545X(2017)01-0076-04
2016-10-15
廖明(1992-),男,云南祥云人,碩士研究生,研究方向為駕駛機器人;涂群章(1969-),男,湖北黃梅人,教授,博士生導師,研究方向為機電一體化。
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
故事大王(2016年7期)2016-09-22 17:30:08
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06
兒童故事畫報(2013年3期)2013-06-24 05:40:30
