煮糖結晶過程數據驅動控制方法
2017-03-21 08:02:34蒙艷玫謝延鵬鄭康元
江蘇農業科學 2016年11期
關鍵詞:仿真
蒙艷玫+謝延鵬+鄭康元
摘要:煮糖結晶過程是蔗糖生產行業唯一沒有實現全自動化的工序,由于該過程存在大時滯、非線性的特點,目前的研究尚難以從機理模型方向對煮糖結晶過程進行控制。針對煮糖結晶過程尚未實現全自動化的問題,研究基于緊格式動態線性化的無模型自適應數據驅動控制方法。結合煮糖結晶過程控制的實際要求,對數據驅動控制系統框架進行設計與實現。利用緊格式動態線性化方法構建動態線性化模型,將非線性系統線性化。實現無模型自適應控制和預測控制的融合,既保留了無模型自適應控制單調收斂性和有界輸入輸出穩定性的顯著特點,又加入預測控制方法控制效果好、魯棒性強的優點。與比例-積分-導數(proportion-integral-derivate,簡稱PID)控制方法的仿真對比分析表明,所用方法取得了更好的控制效果,驗證了基于緊格式動態線性化的無模型自適應數據驅動方法的有效性和優越性。
關鍵詞:煮糖結晶;過程數據;緊格式動態線性化;無模型自適應控制;預測控制;仿真
中圖分類號:S126 文獻標志碼: A
文章編號:1002-1302(2016)11-0405-03
煮糖結晶過程的數據驅動控制是指僅根據煮糖系統結晶過程中產生的離線或在線輸入輸出數據(輸入數據主要為物料流量或物料閥門開度,輸出數據主要為糖膏錘度、液位、溫度或糖液過飽和度)設計控制器,設計的控制器不顯含或隱藏煮糖結晶系統的機理模型信息,而且能夠保障系統的收斂性、穩定性和魯棒性。由此可見,基于數據驅動的煮糖結晶過程控制方法擺脫了傳統控制器設計對煮糖結晶過程機理模型的依賴,避免了傳統控制器在機理模型復雜的情況下存在的魯棒性、可靠性等問題 。
公開文獻報道的數據驅動控制方法主要有侯忠生于1994年提出的無模型自適應控制(model free adaptive control,簡稱MFAC)法[1-4]、Spall于1992年提出的同步擾動隨機逼近(simultaneous perturbation stochastic approximation,簡稱SPSA)法[5]、Uchiyama于1978年提出的迭代學習控制(iterative learning control,簡稱ILC)法[6]、George等于1995年提出的去偽控制(unfasified control,簡稱UC)法[7]、Hjamarsson等于1994年提出的迭代反饋整定(iterative feedback tuning,簡稱IFT)法[8]、應用于控制領域的懶惰學習(lazy learning,簡稱LL)控制方法[9]以及廣泛應用于工業過程中的PID控制方法[10]。其中,SPSA方法雖然能夠實現自適應調節,但其適應性易受系統結構或參數變化的影響,而且與UC、IFT、比例-積分-導數(proportion-integral-derivate,簡稱PID)法一樣,這些方法都需要提前確定控制器結構,而MFAC、ILC、LL則不需要事前確定。雖然MFAC、LL方法采用相同的動態線性化原理,但是LL沒有系統化的控制理論分析體系。MFAC法和ILC法類似,有1套完善的系統分析框架,但MFAC方法由于計算負擔小、易于實現和魯棒性較強的特點,特別是它可保證閉環系統跟蹤誤差的單調收斂性和有界輸入輸出穩定性,使得這種基于數據驅動的控制方法在煮糖結晶過程領域具有巨大的發展潛力。因此,基于MFAC單調收斂性和有界輸入輸出穩定性的顯著特點,本研究應用MFAC這種數據驅動的控制方法研究煮糖結晶過程的控制。
1 總體方案設計
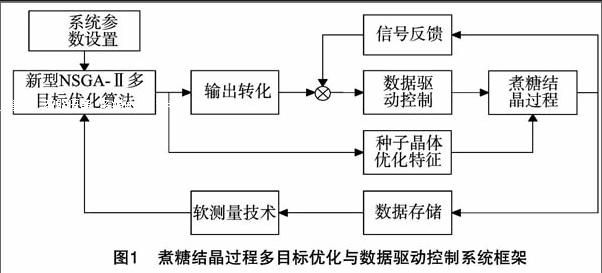
煮糖結晶過程數據驅動控制系統框架如圖1所示,其實現的基本思想主要分為離線部分、在線部分。關于總體方案的具體介紹如下。
(1)離線部分。包括參數設置模塊、新型NSGA-Ⅱ多目標優化算法模塊、軟測量技術模塊、數據存儲模塊、輸出轉化模塊和種子晶體優化特征模塊。首先,軟測量技術模塊從數據存儲模塊中獲取存儲的有關煮糖結晶過程的歷史數據,再計算出不可測量變量,即糖液過飽和度、糖液純度和晶體體積;然后,新型NSGA-Ⅱ多目標優化算法模塊從軟測量技術模塊獲取所需有關參數,再進行優化,將過程優化變量傳輸給種子晶體優化特征模塊,為煮糖結晶過程實施在線操作部分作準備。
(2)在線部分。包括數據驅動控制模塊、煮糖結晶過程模塊、信號反饋模塊和數據存儲模塊。在線過程實施的第1步為根據獲取的種子晶體優化特征指導投種或抽種過程的優化操作;隨后,數據驅動控制模塊根據輸出轉化模塊的參考目標信號、信號反饋模塊的反饋信號實施控制策略,并將產生的輸入信號作用于煮糖結晶過程模塊,再通過信號反饋實現煮糖結晶過程的閉環自適應控制。
2 煮糖結晶過程無模型自適應預測控制方法
2.1 緊格式動態線性化方法
煮糖結晶過程是個大時滯、強耦合、非線性的系統。線性化方法是處理非線性系統的常見做法,其主要目的是為了簡化控制器的設計過程。緊格式動態線性化方法(compact form dynamic linearization,簡稱CFDL)具有結構簡單、輸入輸出數據可直接利用的特點[11-13],本研究選擇該方法構建煮糖結晶過程的動態線性化模型。
由文獻[11]可知,對于單輸入單輸出離線非線性系統,緊格式動態線性化模型建立的條件如下:
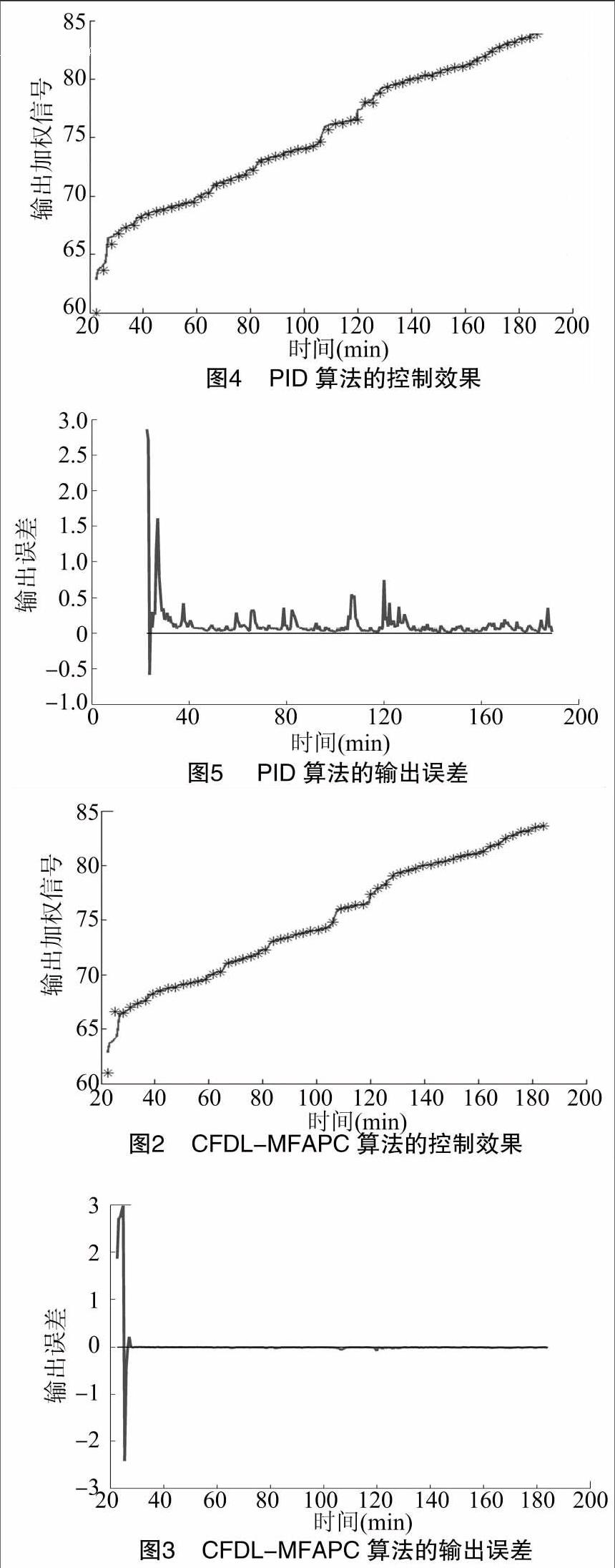
通過對CFDL-MFAPC和傳統的PID控制方法的仿真結果分析可知:2種控制方法在跟蹤期望輸出信號的控制過程中,都表現了良好的跟蹤性能(圖2~圖5);但是根據其對應的控制輸出誤差變化情況可知,CFDL-MFAPC控制方法的控制誤差最小,而且趨近零誤差的速度比PID控制方法都要快。此外,其控制過程的誤差跳變也很小,這充分說明 CFDL-MFAPC 相對PID具有更好的快速反應能力和收斂性,顯示其具有更好的優越性。同時,PID算法的控制效果對參數變化非常敏感,很容易出現失調,參數調整過程非常不方便。而CFDL-MFAPC的參數調整過程比PID控制算法更加方便,在其可調參數中,基本上只需要調節λ參數,λ參數的調節變化對最后的控制效果影響沒有PID算法敏感。因此,CFDL-MFAPC控制算法具有更寬、更靈活的參數可調性。
綜上所述,采用基于CFDL-MFAPC的煮糖結晶過程優化與控制方法在仿真過程中,相對傳統PID控制方法控制效果更好,說明CFDL-MFAPC控制方法的有效性、優越性。
4 結論
針對目前尚無解決煮糖過程多目標優化和協同控制的有效算法的問題,本研究采用基于CFDL-MFAPC的數據驅動控制方法,構建煮糖結晶過程的數據驅動控制系統,設計總體方案,并詳細研究基于數據驅動的CFDL-MFAPC控制方法。利用緊格式動態線性化模型實現線性化處理,結合無模型自適應控制與預測控制,完成煮糖結晶過程多目標優化與控制方法的融合實現。通過仿真對比分析,驗證了基于CFDL-MFAPC的數據驅動控制方法的有效性、優越性。
參考文獻:
[1]侯忠生. 非線性系統參數辨識、自適應控制和無模型學習自適應控制[D]. 沈陽:東北大學,1994.
[2]侯忠生. 非參數模型及其自適應控制理論[M]. 北京:科學出版社,1999.
[3]Hou Z S,Jin S T. A novel data-driven control approach for a class of discrete-time nonlinear systems[J]. IEEE Transactions on Control Systems Technology,2011,19(6):1549-1558.
[4]Hou Z,Jin S T. Data-driven model-free adaptive control for a class of MIMO nonlinear discrete-time systems[J]. IEEE Transactions on Neural Networks,2011,22(12):2173-2188.
[5]Spall J C. Multivariate stochastic approximation using a simultaneous perturbation gradient approximation[J]. IEEE Transactions on Automatic Control,1992,37(3):332-341.
[6]Uchiyama M. Formulation of high-speed motion pattern of amechanical arm by trial[J]. Transactions of the Society of Instrument and Control Engineers,1978,14(6):706-712.
[7]George Z,Bruce A F,Allen T. Feedback control,nonlinear systems and complexity[M]. Heidelberg:Springer-Verlag,1995:196-214.
[8]Hjamarsson H,Gunnarsson S,Gervers M. A convergent iterative restricted complexity control design scheme[C]. Lake Buena Vista:Proceedings of the 33rd IEEE Conference on Decision and Control,1994:1735-1740.
[9]]Schaal S,Atkeson C G. Robot juggling:implementation of memory-based learning[J]. IEEE Control Systems Magazine,1994,14(1):57-71.
[10]Silva G J,Datta A,Bhattacharyya S P. New results on the synthesis of PID contrllers[J]. IEEE Transactions on Automatic Control,2002,47(2):241-252.
[11]侯忠生,金尚泰. 無模型自適應控制:理論與應用[M]. 北京:科學出版社,2013.
[12]侯忠生,徐建新. 數據驅動控制理論及方法的回歸和展望[J]. 自動化學報,2009,35(6):650-667.
[13]Xu J X,Hou Z S. Note on data-driven system approaches[J]. Acta Automatica Sinica,2009,35(6):668-675.
猜你喜歡
中國教育技術裝備(2016年20期)2016-12-12 10:09:15
中小企業管理與科技·下旬刊(2016年10期)2016-11-18 20:57:34
科技資訊(2016年18期)2016-11-15 20:09:22
科技資訊(2016年18期)2016-11-15 07:55:28
價值工程(2016年29期)2016-11-14 02:01:16
電子技術與軟件工程(2016年18期)2016-11-14 00:46:54
數字技術與應用(2016年9期)2016-11-09 23:25:33
數字技術與應用(2016年9期)2016-11-09 22:09:07
科技視界(2016年18期)2016-11-03 21:44:44
科技視界(2016年18期)2016-11-03 20:31:49
