羅經復示器的航向跟蹤方法設計與優化
2017-03-14 11:15:24樊明波
船電技術 2017年2期
高 楊,樊明波,蔡 君
(鎮江船艇學院,江蘇鎮江212003)
羅經復示器的航向跟蹤方法設計與優化
高 楊,樊明波,蔡 君
(鎮江船艇學院,江蘇鎮江212003)
為提高步進電機式羅經復示器跟蹤船舶航向的實時性、準確性及穩定性,提出了速率-位置控制及Kalman濾波兩種跟蹤方法,通過對航向數據的預處理有效提高了航向跟蹤的連續性、平滑性。結果表明采用速率-位置控制方法的羅經復示器動態復示效果好,能較好的滿足船用要求。
羅經復示器 Kalman濾波 速度-位置控制
0 引言
精確的航向是船舶安全航行的一個重要保證。傳統的航海儀器中的航向角位置檢測常用自整角機(synchro)、旋轉變壓器(resolver)完成檢測、傳輸、接收和變換等工作,它們用于船舶導航以來,對船舶的自動操舵航行、雷達天線跟蹤等提供精確的航向發揮了重要作用。但是自整角機或旋轉變壓器使用了大量的機械器件,機械間的嚙合不良、摩擦力增加、機械磨損等原因[1],使傳遞的航向產生偏差,操舵人員需經常與標準羅經航向比對,消除分羅經的誤差,不但傳向精度低,還存在可靠性較差、故障率高以及檢查、調整、消除誤差及維護保養繁瑣等缺陷。為適應現代船舶設備發展的要求,能接收數字航向的復示器被廣泛使用,尤其是表盤式的航向復示器,這類航向復示器跟蹤航向與傳統的自整角機式分羅經相比存在跟蹤航向跳躍性大、運轉不平滑等問題。
本文從數字控制器件-步進電機設計的羅經復示器出發,分別通過建立 Kalman濾波模型的方法和速度位置控制的方法分析、處理及復示接收的航向優化復示器動態跟蹤效果。
1 系統結構
羅經復示器[2]航向跟蹤系統如圖1所示,系統包括:模擬數字羅經航向單元,航向信息接收處理單元,航向顯示單元。
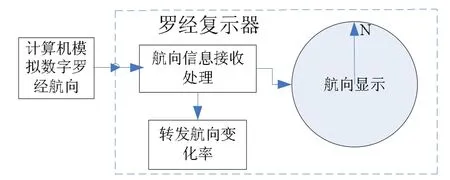
圖1 羅經復示器航向跟蹤系統結構圖
1.1 模擬船舶航向單元
該單元主要完成數字羅經航向輸出,采用C++ Builder 6.0軟件編寫“數字羅經航向輸出模擬程序”的小軟件(見圖 2),只需在軟件的航向模擬參數框中設定震蕩的幅值、周期、發送格式等相關參數,就可以生成符合NEMA0183(美國電子航海儀器信號標準)格式標準的航向信息,通過RS232C接口發送出來,包含直航向震蕩保持、回旋航向等船舶航行常見規律的航向信息。RS232C通信協議為:波特率4800bps,8位數據位,1位停止位,無校驗位,ASCII碼數據格式。
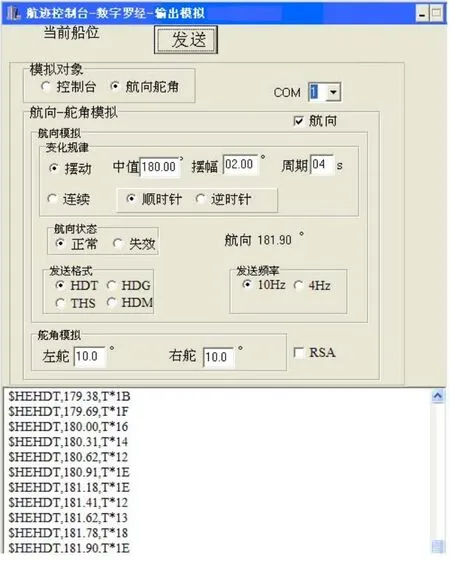
圖2 數字羅經航向輸出模擬程序主界面
1.2 航向信息接收處理及航向顯示單元
航向信息接收處理單元包括RS232C/TTL電平轉換電路、單片機控制電路、零位初始對準電路、步進電機驅動電路等[2],硬件結構見圖3。
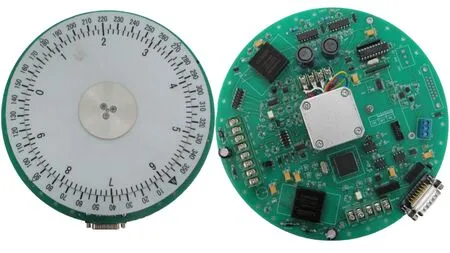
圖3 羅經復示器硬件結構圖
單片機主控程序是羅經復示器的核心,它實現與上位機的通信,對羅經復示器的運行狀態進行控制。主程序采用Keil-C語言編寫,程序采用模塊化設計,主要由3部分組成:
1)數據通信程序:實現接收及轉發PC機生成的航向信號,并發送復示器經計算得到的航向變化率。
2)步進電機控制程序:實現步進電機的轉動及方向控制。
3)數字航向信息處理:處理接收的航向信息。
2 數字航向處理算法設計思路
實際船舶航向變化一般符合一定的規律:船舶轉向時航向變化是一個連續的過程,保持航向時航向的變化量一般較小且變化也是連續的。但實際數字航向信息卻是離散信息,航向信息本身是不連續的,羅經復示器接收到航向信息后,如果對航向信息不做任何處理而簡單的將數字航向信息復現出來,復示器處理器因處理不來導致航向的顯示將出現嚴重滯后性,此外實際反映出來的航向也具有較大跳躍性。因此,對接收的航向進行預處理很必要。下面分別介紹速率、位置聯合控制方法及基于船舶K-T方程利用Kalman濾波器[3]的方法對航向進行處理。
2.1 速率、位置控制
所用的羅經復示器采用步進電機帶動航向碼盤轉動的方式,脈沖的個數決定步進電機正轉或反轉相應的角位移[4-8],步進電機的轉速與脈沖頻率成正比。位置、速率精確控制的實現方法的基本思想:復示器當前顯示的航向與接收到的航向之間的差值決定復示器轉動的速率及轉動方向,而復示器的轉動速率由控制程序發送的脈沖頻率決定,差值決定脈沖個數:航向差值越大,脈沖頻率越高,復示器轉動越快;航向差值越小,脈沖頻率越低,復示器轉動越慢。但是,這種跟蹤方式沒有考慮復示器的轉動趨勢,當航向變化率較小時,跟蹤的效果不錯,但當航向高頻震蕩時,復示器復示出現嚴重滯后,滯后的關鍵問題是復示器的轉動速率沒有跟上接收航向的變化率。
程序中將航向的歷史數據保存起來,通過這些數據計算當前船舶的航行變化率,再結合該變化率估算下一時刻的航向,最后比較當前航向與估計航向的差值。為了保證發送的脈沖頻率準確,確保復示器航向變化能跟上接收的航向變化,采取如下措施:運用單片機定時器2模式2自動重裝載計數器初始值,定時器的高低8位裝載的初始值采用查表法查詢預先計算好的的脈沖定時時間間隔;由專用單片機及驅動芯片控制步進電機,專機專事避免主單片機的各種中斷影響程序的精確控制。
2.2 Kalman濾波器設計
在船舶航行環境中,將船舶航行看作質點作平面運動,表達式近似為:
式中:kv為航向變化率,ku為航向加速度,kP為航向。為速度白噪聲項,為航向噪聲項,T為采樣周期。定義濾波器模型的狀態向量,則系統可表示為:
船舶航行過程中通常是保持航向狀態,忽略船舶的航向加速度 uk,將操舵產生的航向加速度看成噪聲,則式(3)可進一步簡化為:

對應式(3)的Kalman濾波方程為:
3 試驗結果分析
試驗分別進行了靜態復示試驗和動態復示試驗,前期試驗復示器對固定航向的復示精度,驗證電路的可實現性,并進行了通訊協議、極限轉速、最低轉速等實驗,初步證明了該復示器具有較好的靜態復示效果。后期航向跟蹤主要采用動態模擬跟蹤,模擬了航向保持、航向回轉等實驗,驗證復示器動態復示效果。這里給出速度聯合控制方案和 Kalman濾波方案在航向保持情況下的跟蹤效果。
仿真參數及條件為:船舶航向初始值180°,擺動幅值2度,擺動周期20 s。
從圖中可以看出,單純的位置控制方法,控制方法簡單,理論上不考慮延時的話顯示的航向與實際接收的航向一致,但航向跟蹤的平滑程度較差,航向變化率不能結合當前實際航向的變化趨勢,做不到提前控制,這樣航向碼盤的轉動存在抖動現象,延時現象很嚴重。
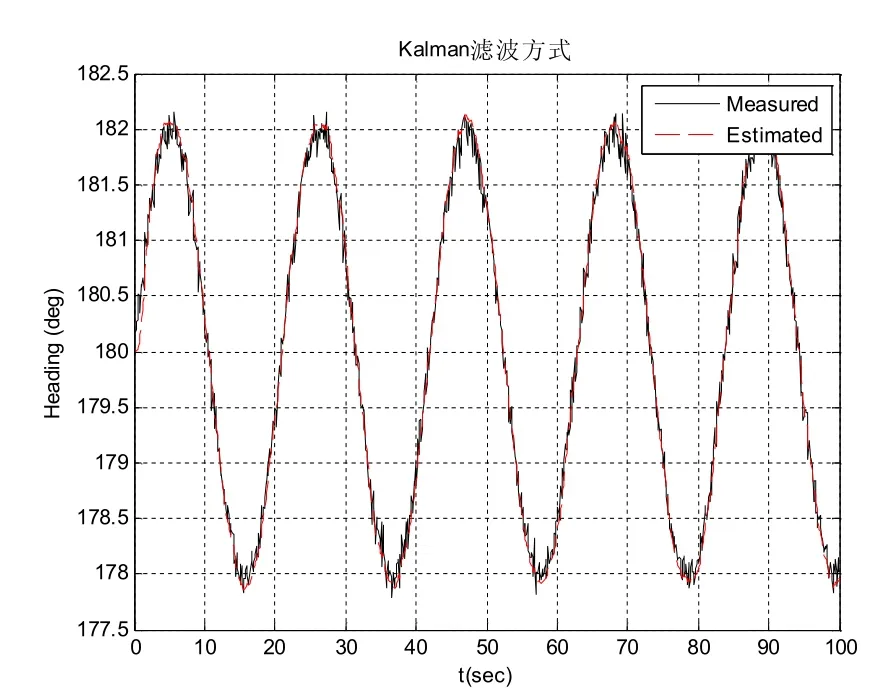
圖4 Kalman濾波方案跟蹤效果

圖5 Kalman濾波方案跟蹤誤差
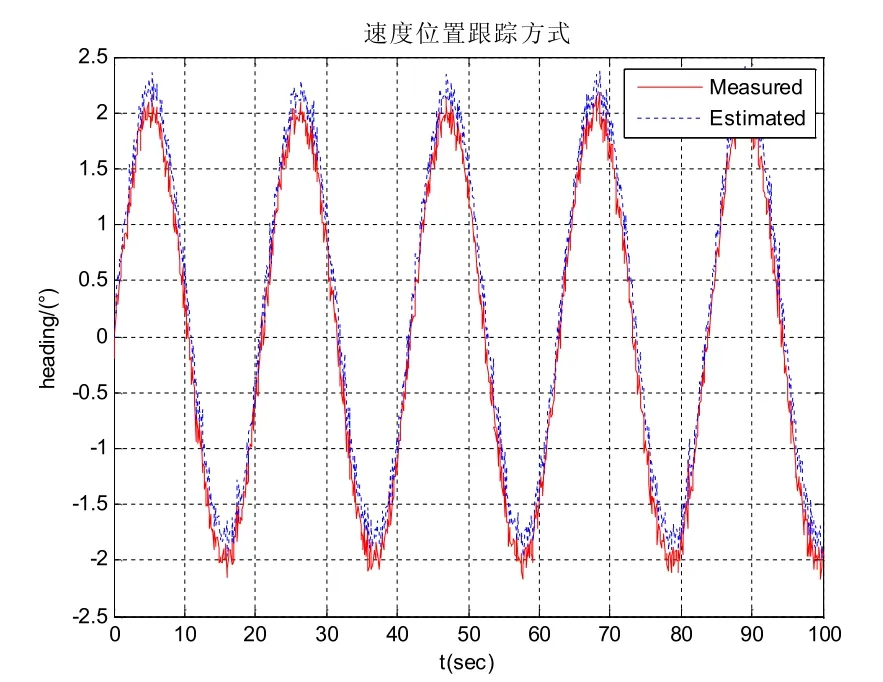
圖6 速度位置跟蹤效果
Kalman濾波的方法也存在一點延時的問題,這與航向中沒包含舵角信息有關,模型建立不能結合舵角信息(舵角能反映偏航變化的快慢及方向),但Kalman濾波的方法可以濾掉航向中包含的一些較為明顯的錯誤航向,跟蹤的平滑度較好(即碼盤顯示很平滑),基本符合實際航向的變化規律,碼盤顯示的航向與實際接收航向基本吻合。此外,船舶在實際航行過程中擺動幅值及擺動周期都相對要大一些,實際在跟蹤過程中誤差可進一步減小。
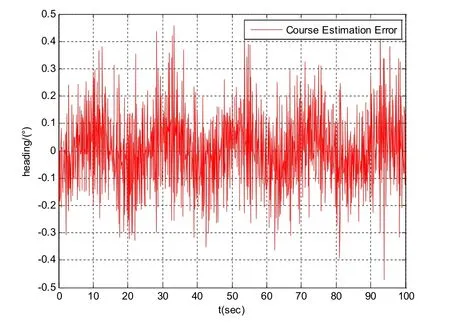
圖7 速度位置跟蹤誤差
速度位置控制的方法避免了單純位置控制的缺點,加入了與偏航速度有關的控制作用,有一定的預測效果,跟蹤效果較位置控制有明顯改善,但跟蹤的平滑度不及濾波算法,精度也稍差一些。
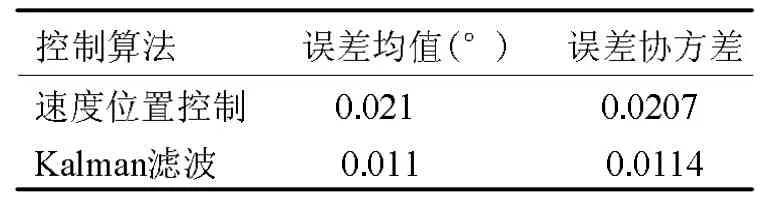
表1 各控制方案的跟蹤誤差比較
表1給出各控制算法的誤差均值及協方差,可以看出 Kalman濾波控制精度更高,但就結合單片機而言,速度位置控制方法的控制算法容易在單片機中實現,且控制精度能滿足要求,因此,速度位置控制方法更適用于此羅經復示器。
4 結語
航海儀器采用數字技術是儀器發展的必然趨勢[1]。本文介紹了以步進電機式羅經復示器為核心的兩種數字航向處理算法,通過仿真實驗驗證了兩種方案的跟蹤效果。從試驗結果來看,Kalman濾波方案和位置、速度聯合控制方案達到了船舶動態航向跟蹤的要求,但步進電機還存在低頻共振及高頻負載能力較弱等問題,還需進一步完善其硬件結構,如加入細分控制電路等。在后續的算法完善過程中,還需通過模擬各種船舶航行規律驗證及建立結合船舶舵角的算法。
[1] 寇連坡. 數字技術在陀螺羅經的應用[J]. 青島遠洋船員學院學報, 2006, 2: 48-50.
[2] 高楊, 陳永冰, 周崗. 數字羅經機械復示器的設計與實現[J]. 艦船電子工程, 2010, 12: 186-188.
[3] 張顯庫, 賈欣樂. 船舶運動控制[M] . 北京: 國防工業出版社, 2006.
[4] 王鴻鈺. 步進電機控制技術入門[M] . 上海: 同濟大學出版社, 1990.
[5] 劉勇, 李文魁, 陳永冰等, 低能耗船舶航向保持混合靈敏度 H∞控制算法[J]. 武漢理工大學學報, 2010, 6: 95-97.
[6] 彭秀艷, 胡忠輝. 帶有海浪濾波器的船舶航向反步自適應輸出反饋控制[J]. 控制理論與應用, 2013, 7: 55-58.
[7] 王志文, 彭秀艷. 基于自適應輸出反饋的船舶航向控制[J]. 北京理工大學學報, 2011, 31(4): 425-429.
[8] Unar M A , Murray Smith D J . Automatic Steering of Ships Using Neural Networks[J] . Int J of Adaptive Control Signal Processing , 1999, 13 (6): 203-218.
Design and Optimization of the Course Tracking for Compass Repeater
Gao Yang, Fan Mingbo, Cai Jun
(Zhenjiang Watercraft College, Zhenjiang 212003, Jiangsu, China)
In order to improve the stability, accuracy, and real-time property of stepping motor compass repeater, two tracking method of velocity-position control and the kalman filter are proposed. Continuity and smoothness of course tracking can be improved by preprocessing the heading data. The test result shows that the dynamic display effect of the compass repeater with velocity-position tracking control method is good which can satisfy the requirements for ship.
compass repeater; Kalman filter; velocity-position control
TP273.3
A
1003-4862(2017)02-0054-04
2016-10-09
高楊(1987-)男,碩士,講師。研究方向:導航技術。E-mail:gaoyang441@126.com
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中華手工(2017年2期)2017-06-06 23:00:31
電子設計工程(2015年15期)2015-02-27 12:07:30
中外會展(2014年4期)2014-11-27 07:46:46
航海(2005年4期)2005-04-29 00:00:00