基于改進遺傳算法的ROV推進器伺服系統辨識
2017-03-14 05:20:05丁漢卿王旭陽葛彤
哈爾濱工程大學學報 2017年2期
丁漢卿,王旭陽,葛彤
(上海交通大學 船舶海洋與建筑工程學院,上海200240)
基于改進遺傳算法的ROV推進器伺服系統辨識
丁漢卿,王旭陽,葛彤
(上海交通大學 船舶海洋與建筑工程學院,上海200240)
針對ROV變量液壓推進器伺服控制系統的控制模型,提出了采用改進遺傳算法進行控制模型參數辨識。為解決遺傳算法易早熟,難以找到精確解等問題,采用一種基于均勻設計的種群初始化方法和一種改進變異方式的深度捕食策略,有效提高了ROV變量液壓推進器伺服控制模型辨識算法的全局收斂性和搜索效率。同時,利用液壓試驗平臺搭建液壓回路模擬液壓推進器伺服控制系統,采集試驗數據辨識得到了ROV變量液壓推進器的精確控制模型,仿真和實驗結果證明了辨識算法的可行性和模型的正確性。
ROV推進器模型;變量馬達;遺傳算法;捕食策略;種群初始化
ROV(remote operated vehicle)是人類在海洋探索和開發中的重要工具,運動控制技術是ROV的關鍵技術之一,是各國研究機構的研究熱點,而ROV推進系統模型是設計運動控制策略的基礎。液壓伺服系統具有系統體積小、重量輕、控制精度高、響應速度快的優點,廣泛用于ROV的推進系統。按照所使用的調速方法不同,ROV液壓推進系統又可以分為節流調速系統和容積調速系統兩大類[1]。節流調速系統通過改變控制閥的節流口大小,調節液壓馬達的轉速,如加拿大ASE公司的HYSUB作業型ROV。容積調速系統則是通過改變液壓馬達的排量進行調速,容積調速系統雖然相對復雜且成本較高,但效率較高,發熱量小,控制精確,且變量馬達的排量普遍較大,易獲得大流量高轉速,廣泛應用于大功率ROV,如英國Perry Slingsby公司生產的TRITON系列作業型ROV等。基于其以上優良性質,上海交通大學水下工程研究所研制的“海龍二號”ROV液壓推進系統采用了基于變量馬達的容積調速系統。以往對于ROV推進系統的研究多側重于推力控制分配算法,而對液壓推進器伺服控制系統控制模型研究較少[1-3]。文獻[4]根據推進器的推力-油壓-流量曲線圖來計算定量液壓推進器的控制輸入,文獻[5]對ROV定量液壓推進器控制系統輸入輸出關系進行了線性化,并且利用階躍響應系統辨識法得到了系統的二階模型,但階躍響應法辨識誤差較大。以上均未涉及變量液壓推進器伺服控制系統建模,而液壓推進器伺服控制系統中諸如液壓缸等構件的內部參數難以測量,因此有必要參數化其數學模型,對其進行辨識,以便得到一個可以更客觀的反映推進器性能的控制模型,為控制策略的研究提供一個可靠的基礎。為此,作者設計了辨識試驗,采用改進的遺傳算法對ROV變量液壓推進器伺服控制系統進行了辨識。
遺傳算法源于自然進化與遺傳機制,將‘優勝劣汰,適者生存’的生物進化原理引入待辨識參數形成的編碼串聯群體中,在解空間中進行大規模、全局、并行搜索,使種群朝全局最優的方向收斂。遺傳算法有著極強的魯棒性,與梯度類優化算法相比,遺傳算法可以明顯地改善辨識結果,但本身存在著易早熟,局部搜索能力較低的不足[6-7]。捕食搜索算法是一種用于解決組合優化問題的空間搜索策略,它是在模擬動物捕食行為的基礎上提出的,是一種平衡全局搜索能力和局部開發能力的方法[8]。應用捕食搜索算法尋優時,先在整個搜索空間進行全局搜索,直到找到一個較優解,然后在較優解附近區域進行集中搜索,直到搜索很多次也沒有找到更優解,從而放棄局部搜索轉為全局搜索。
受此啟發,本文提出了一種深度捕食策略,較好地解決了搜索效率問題,特別是變異方式的改進,有效提高了算法的局部搜索能力。同時,遺傳算法初始種群的個體分布狀況直接影響算法的全局收斂能力,在標準遺傳算法中交叉機制能夠搜索包含當前種群極小模式中的所有個體,但卻不能搜索到不在當前種群極小模式中的個體[9]。
當然,初始種群中若最優解的信息較少也可以通過群體的進化來得到,從而達到最優解,但由于算子本身的隨機性,僅靠算子是不能確保算法搜索到最優解區域的,本文基于均勻實驗設計,提出了一種新的種群初始化方法,較好的解決了遺傳算法的全局收斂性性問題。
1 ROV液壓推進器伺服控制系統建模
“海龍二號”ROV變量液壓推進器伺服控制系統的主要部件包括:Star200液壓伺服閥、液壓缸、變量馬達、連接管路、螺旋槳。馬達的排量由伺服閥控液壓缸裝置控制,伺服閥的閥開口大小與給定信號成比例,控制液壓缸活塞運動,活塞位移對應變量馬達斜盤傾角,進而控制馬達的排量,從而控制馬達轉矩與槳的推力。液壓原理如圖1所示。
考慮到伺服閥的帶寬在100 Hz左右,遠高于液壓缸與變量馬達帶寬,因此伺服閥的動態特性可以忽略,近似為比例環節。
1)伺服閥數學模型的建立。
(1)
式中:Kbv為伺服閥增益系數,m/A;Xv為伺服閥芯位移量,m;I為輸入電流,A。

圖1 ROV推進器液壓原理圖Fig.1 Hydraulic schematic diagram of ROV thruster
2)液壓缸數學模型[10]。
(2)
式中:Z為液壓缸活塞位移量,m;Kq為伺服閥在穩定工作點附近的流量增益,m3/s;Kce為總流量壓力系數,m5/N·s;A為液壓缸活塞有效面積,m2;Vt為兩腔的總容積,m3;βe為有效體積彈性模量,N/m3;FL為作用在活塞上的任意負載力,N;w0為綜合固有頻率,Hz;wr為慣性環節的轉折頻率,Hz;ζ0為綜合阻尼比。
3)斜盤環節數學模型的建立。

(3)
式中:L為變量活塞油缸施力點與斜盤鉸接點的距離,m;γ為變量馬達斜盤傾角,rad;K(φ)為變量馬達斜盤傾角系數。
4)變量馬達環節數學模型的建立[10]。
(4)
式中:M為馬達輸出,N·s;Dm0為變量馬達的最大排量,m3;wm0為調節變量馬達時的初始轉速,rad/s;Ct為變量馬達的總泄露系數,m5/N·s;p10為調節變量馬達時高壓側的初始壓力,Pa;V0為馬達工作腔及連接管道的總容積,m3。
5)扭矩-槳推力環節數學模型。
(5)

6)系統的傳遞函數。
(6)
式中:Kz=KbvKqKφDm0KTM(wm0Dm0+Ctp10)/A。
由理論推導知,ROV變量液壓推進器伺服控制系統的控制模型為四階時變線性模型,如式(6),系統傳遞函數方框圖如圖2。
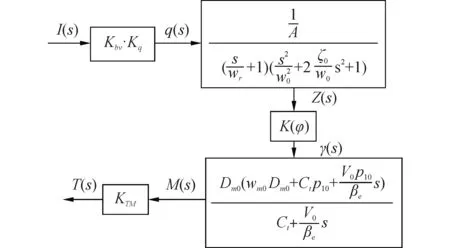
圖2 系統傳遞函數方框圖Fig.2 Block diagram of transfer function
但考慮到工程實際,辨識到三階模型已經足夠,因為彈性模量βe量級在108左右,零點與第四個極點負實部的絕對值很大,且彼此接近,對應的響應分量衰減迅速,對系統性能影響甚微,可以忽略[11]。故系統的傳遞函數可簡化為
(7)
2 改進遺傳算法設計
系統辨識的方法很多,遺傳算法是一種基于進化論的非梯度并行優化算法,能在復雜空間進行魯棒搜索,所以本文采用遺傳算法完成ROV變量液壓推進器伺服控制系統的辨識工作,并針對遺傳算法易早熟,難以找到精確最小值等問題,進行了改進。由式(7)可知:
(8)
(9)

(10)
2.1 基于拉丁方法的種群初始化
無論是從遺傳算法的基礎理論還是從算子的運算方式上講,交叉操作對初始種群的依賴性較強,而遺傳算法的搜索速度主要依賴于交叉計算,所以,初始種群的優劣也會對算法的快速性產生較大的影響。確定初始種群的核心就是希望初始種群擁有合理的多樣性并在盡可能少的代數內將尋優搜索引導到最優解區域[12]。均勻設計是解決這一問題科學而有效的方法。均勻設計可以用最少的信息來獲取空間最多信息。均勻設計表產生的方法很多,從算法簡便性出發,現采用拉丁方法產生均勻設計表Un(ns)[13]。具體構造方法如下:
1)給定水平數n,用1,2,…,n作為拉丁方元素。給定[1,2,…,n]的一個置換,例如[2,1,3,…,n],將該向量每個元素左移一格,第一個元素移到向量的最后位置,得到[1,3,…,n,2] ,重復此操作n-1次,得到的n個向量組成一個拉丁方。
2)任一拉丁方就是一個Un(nn)。該拉丁方共n!個。
3)引入均勻性度量函數中心化L2-偏差:
(11)

5)X0(i,j)=Xmin(j)+(Xmax(j)-Xmin(j))·
2.2 深度捕食搜索策略

為提高局部搜索能力,將變異方式進行改進,從當前種群中隨機選擇三個個體Xp1、Xp2、Xp3,并且i≠p1≠p2≠p3。
Xi,j(t+1)=XB,j+F·(Xp2,j(t)-Xp3,j(t))
式中:F為變異因子,p1、p2、p3為隨機整數,表示個體在種群中序號,XB(t) 為當前種群中最好的個體。變異時利用差異化向量進行變異操作,并且借鑒了當前種群最好個體的信息,可加快收斂速度。
(12)
式中:kg為當前進化代數,G為總進化代數,Pc1max、Pc1min分別為最大、最小交叉概率,Pm1max、Pm1min分別為最大、最小變異概率。
2.3 改進遺傳算法的實現步驟
1 )設置算法運行參數,種群大小n,編碼長度L,最大進化代數G,局部搜索代數nn,遺傳算子操作概率pc1max、pc1min、pm1max、pm1min、Pc2、Pm2,參數搜索范圍向量Xmin、Xmax,初始化種群。
2 )計算種群中個體的適應度。
3) 選擇:根據個體適應度大小按適度比例法選擇個體,采用精英保留策略保留最優個體。
4) 計算當代最佳適應度與歷代最佳適應度之比g,決定交叉和變異概率以及變異方式。若g>k,進行局部搜索,否則轉6)。
5)進行局部搜索。
6)判斷局部搜索代數m是否大于nn,若是則進行全局搜索,否則轉4)。
7)進行全局搜索。
8)進化終止條件判斷,如滿足條件,則停止計算輸出最佳結果,否則轉2)。
改進遺傳算法流程如圖3所示。
3 辨識結果及討論
本文試驗是在上海交通大學水下工程研究所液壓伺服試驗平臺上進行的,該平臺是集機械、電控、液壓與儀表為一體的綜合性能試驗臺, 主要由液壓泵站、伺服閥箱、電控箱、推進測力單元、手操面板、桌面支架和監控操作臺組成,如圖 4所示。

圖3 改進遺傳算法流程圖Fig.3 Flow chart of improved genetic algorithm
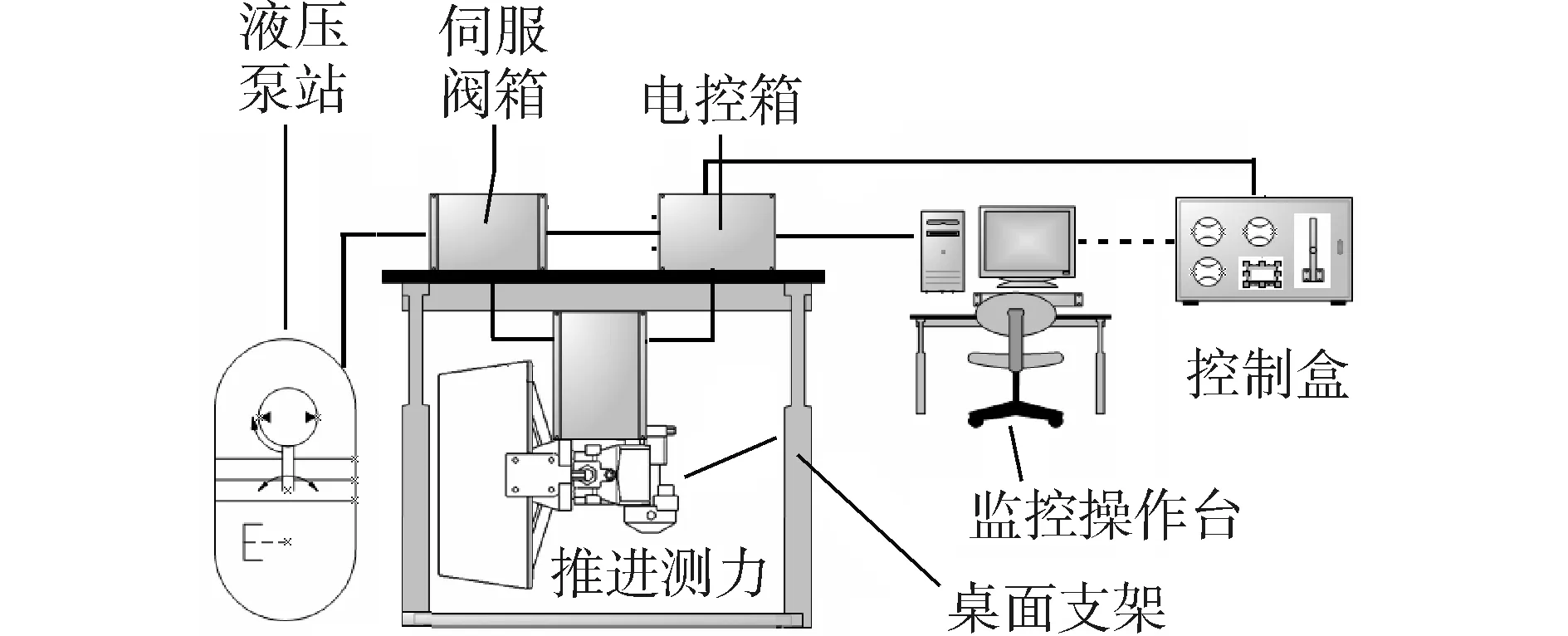
圖4 液壓伺服平臺組成圖Fig.4 Composition diagram of hydraulic platform
利用該平臺能夠實現對單推進器的液壓伺服控制和油壓、推力等關鍵參數的測量與記錄。試驗采樣頻率為100Hz,其輸入電壓范圍為-10~10V,S型拉力傳感器EVT-10A的量程為-4 900~4 900N,精度2.0±10%mV/V。首先對拉壓力傳感器進行標定,驗證其準確性,然后安裝推進器、油壓傳感器和流量傳感器等,將臺架放入水底后,再進行水池測試。選擇正弦信號作為輸入信號,記錄推力數據。試驗布置如圖 5所示。
設定種群規模為n=30,Pc1max=0.8,Pm1max=0.18,Pm1min=0.1,Pc2=0.2,Pm2=0.4,k=1。總迭代次數為100時,可以達到較好的辨識效果。
以試驗輸入和去除高頻擾動后的試驗輸出作為樣本數據,分別采用未改進遺傳算法和改進遺傳算法對參數進行10次重復辨識,結果如表1所示。圖6、圖7為典型算例目標函數變化圖,采用未改進遺傳算法辨識參數時,大約在25代左右目標函數值基本收斂到0.73,繼續運算時目標函數值停滯不前,程序陷入“局部最小值”,很難再進一步得到更準確的結果。而采用改進遺傳算法能夠跳出“局部最優”且收斂速度明顯增快,目標函數值達到0.13,經過相同次數的迭代運算目標函數值更小,因此,改進遺傳算法的計算結果與實際結果的符合程度更高,辯識出的參數更準確。根據改進遺傳算法辨識得到的最優個體建立ROV變量液壓推進器的控制模型:
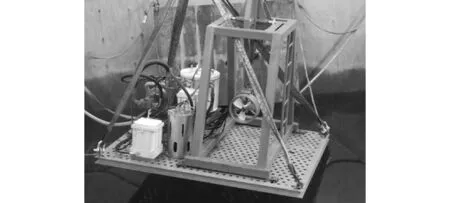
圖5 試驗布置圖Fig.5 Picture of test
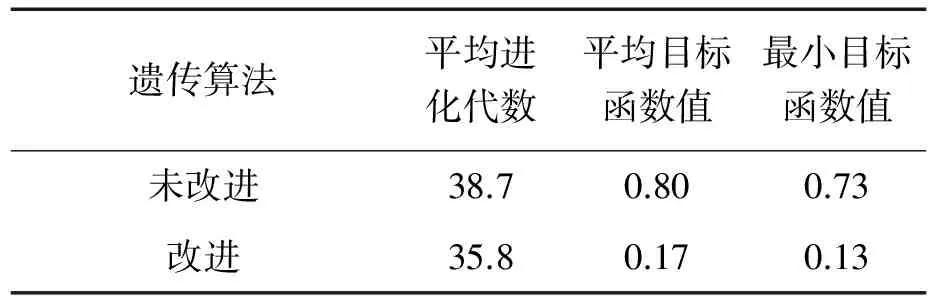
遺傳算法平均進化代數平均目標函數值最小目標函數值未改進38.70.800.73改進35.80.170.13
給予所得模型與試驗相同的輸入信號,模型輸出與試驗輸出比較如圖 8,擬合率達到92.3%,仿真結果與實驗結果的吻合程度很好。模型殘差分析如圖 9,由圖可知,模型輸出殘差與輸入的互相關函數曲線位于99%置信區間內,可以認為輸入與殘差是獨立的,即沒有未被模型識別的輸入輸出關聯。
為進一步檢驗模型的正確性,使用未用于辨識的8組試驗數據進行驗證,如圖10~12。
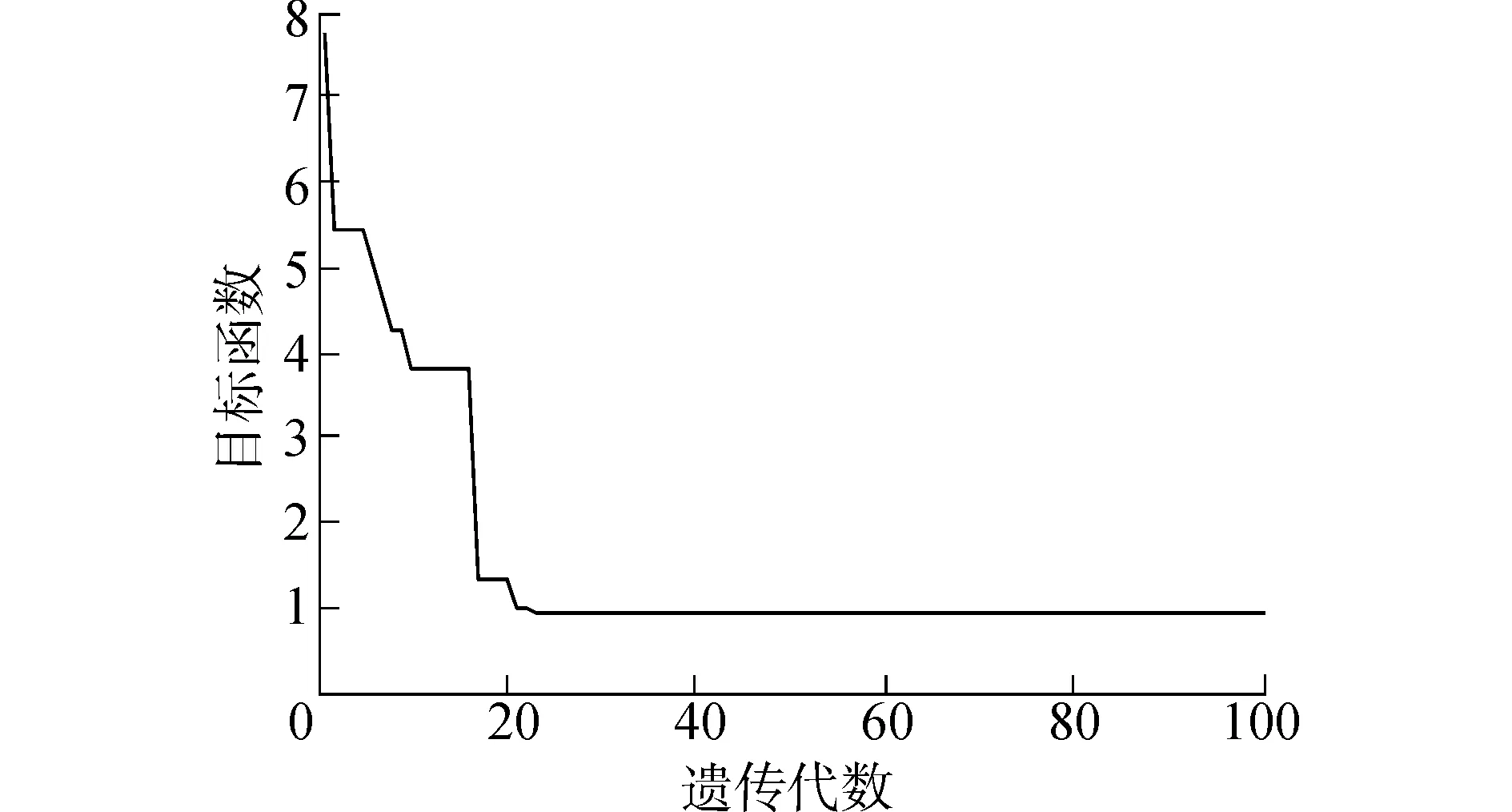
圖6 未改進遺傳算法目標函數Fig.6 Convergence process of unimproved GA
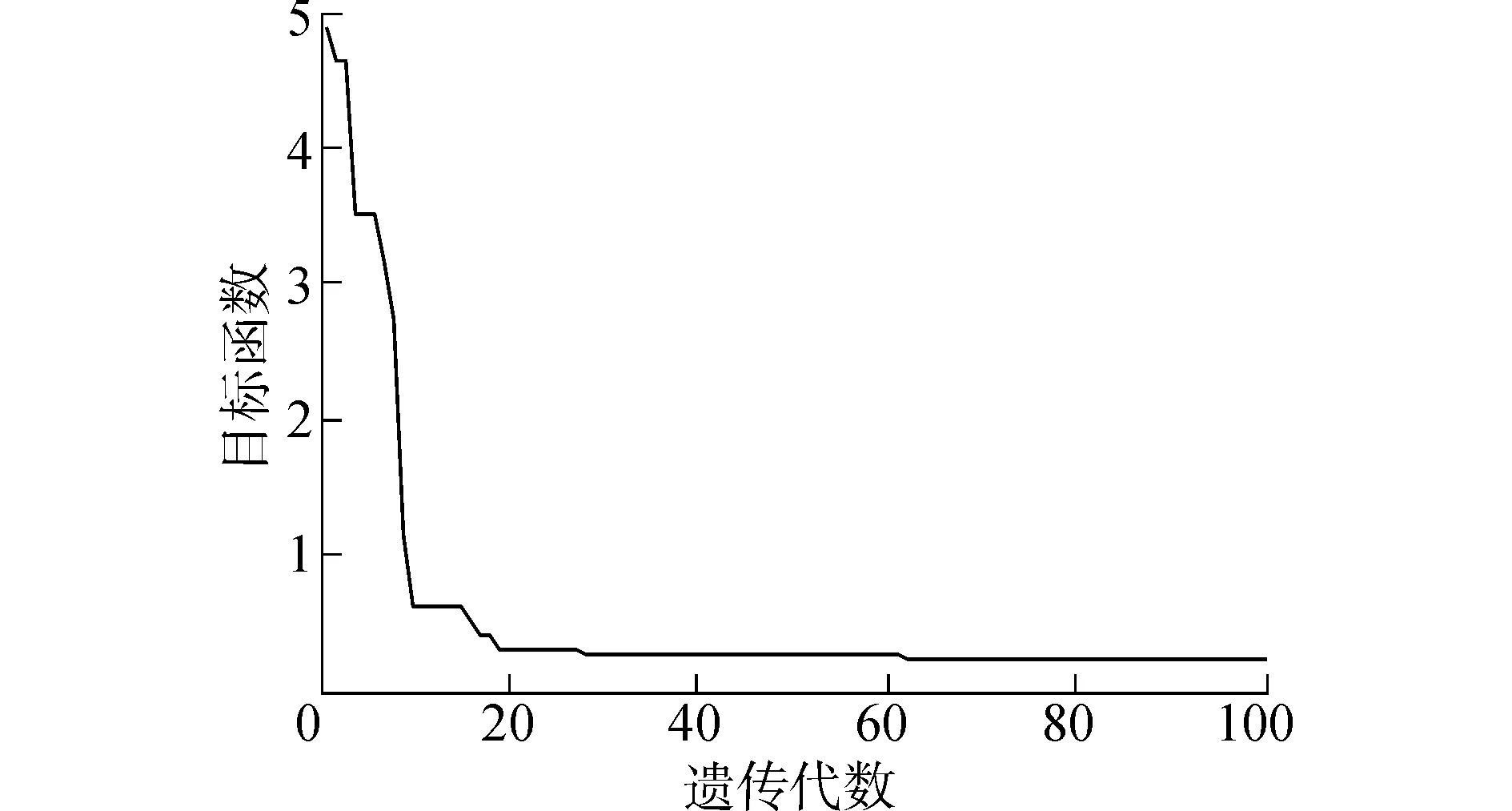
圖7 改進遺傳算法目標函數Fig.7 Convergence process of improved GA

圖8 試驗與模型輸出推力比較圖Fig.8 Trust curve of experiment data and model simulation results
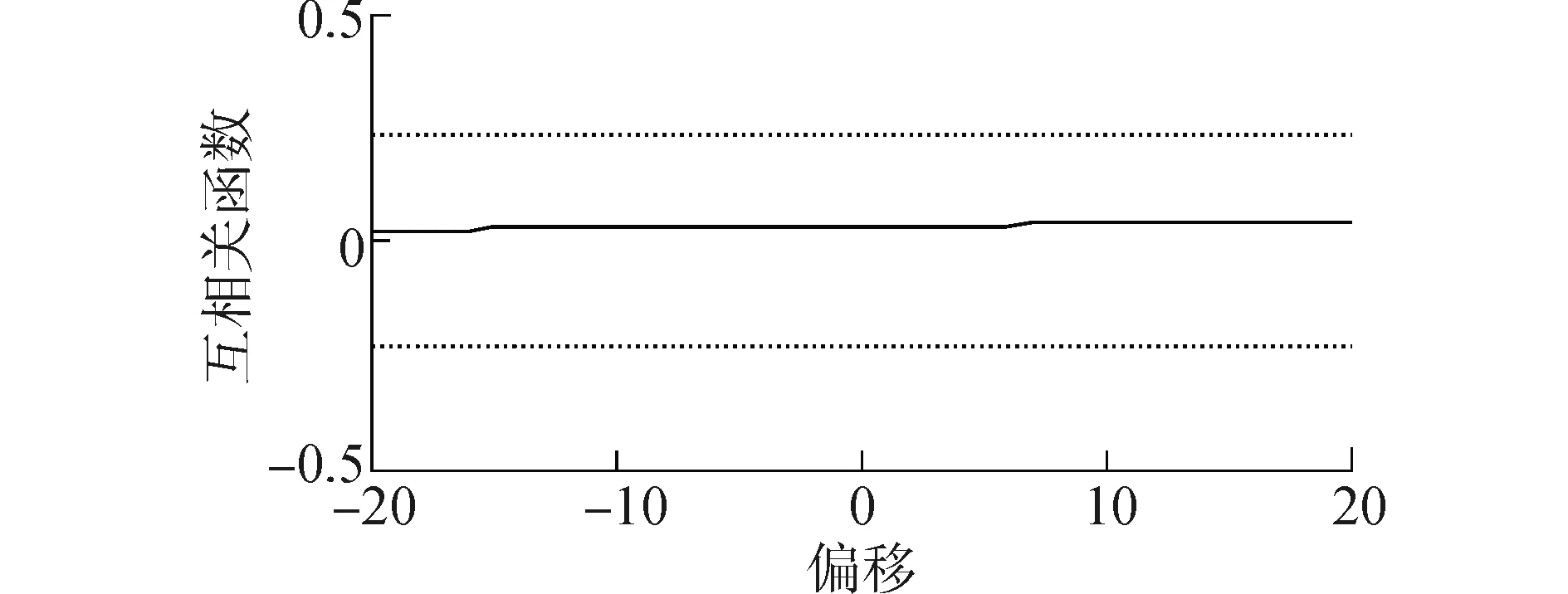
圖9 輸入與模型輸出殘差的互相關函數圖Fig.9 Cross correlation function between input and residuals

圖10 線性輸入下的推力時間曲線(正)Fig.10 Trust curve of linear input(positive)
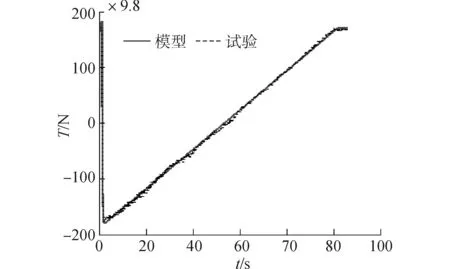
圖11 線性輸入下的推力時間曲線(反)Fig.11 Trust curve of linear input(negative)
圖10、圖11為線性輸入時,模型與試驗輸出對比圖,擬合率分別為91.4%、90.8%。圖12為正弦信號輸入時,模型與試驗輸出對比圖,其中,圖12(a)正弦信號周期為4 s,擬合率為91.4%,圖12(b)為9 s,擬合率為90.4%,圖12(c)為15 s,擬合率為90.2%,圖12(d)為20 s,擬合率為89.1%。由此可知模型具有優良的預報性能。
綜上所述,可以認為采用改進遺傳算法辨識出的模型較高程度地符合實際系統,可以用于后續計算與研究,同時也說明了本文辨識方法的有效性和可行性。
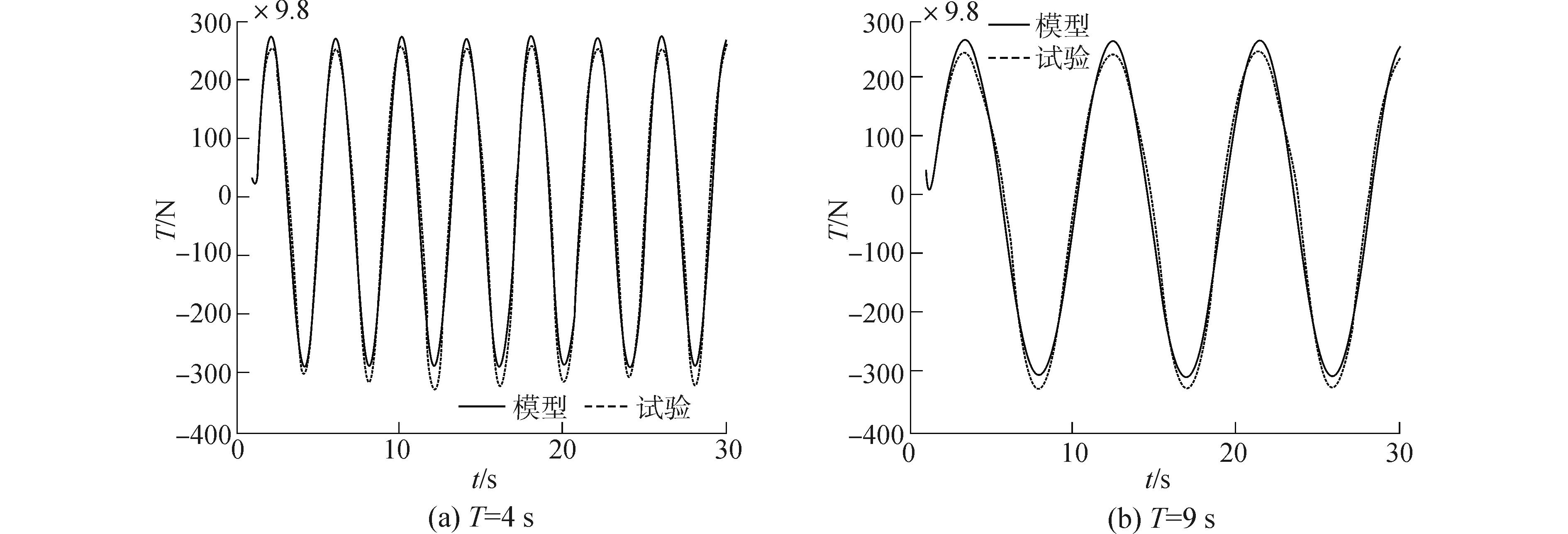
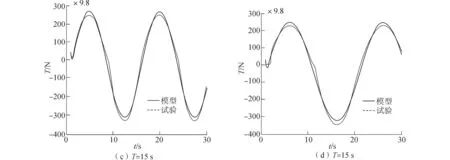
圖12 不同周期下的推力時間曲線Fig.12 Trust curve of different period
4 結論
1)本文對“海龍二號”ROV變量液壓推進器伺服控制系統進行了建模和分析,在難以得到液壓缸及變量馬達內部尺寸等參數的情況下,通過系統辨識試驗得到了較為精確的系統模型,并使用多組試驗數據對模型進行了驗證。
2)ROV變量液壓推進器伺服控制系統的控制模型與實際系統吻合良好,為后續推進系統改進、設計及控制策略分析提供了可靠的基礎。
3)本文所提出的改進變異方式的遺傳算法有效抑制了遺傳算法的早熟現象,具有較快的收斂速度,同時克服了其局部尋優能力差的缺點,并且通過多次運算驗證,改進的算法穩定性較好,此改進遺傳算法可用于其他工程模型的辨識與研究。
[1]朱康武. 作業型ROV多變量位姿魯棒控制方法研究[D]. 杭州: 浙江大學, 2012. ZHU Kangwu. Research on multivariable robust position and attitude control of work-class ROV[D]. Hangzhou: Zhejiang University, 2012.
[2]JIANG Shuqiang, JIN Hongzhang, WEI Fengmei. Bi-criteria optimal fault-tolerable control for SY-II remote operated vehicle[J]. Journal of Shanghai jiaotong university (science), 2013, 18(5): 542-548.
[3]魏延輝, 陳巍, 杜振振, 等. 深海 ROV 伺服控制方法研究及其仿真[J]. 控制與決策, 2015, 30(10): 1785-1790. WEI Yanhui, CHEN Wei, DU Zhenzhen, et al. Servo control method of ROV and simulation[J]. Control and decision, 2015, 30(10): 1785-1790.
[4]劉西佳. 基于AMESim作業型ROV液壓推進系統的設計與仿真[D]. 青島: 中國海洋大學, 2014. LIU Xijia. Design and simulation of work-class ROV hydraulic propulsion system based on AMESim[D]. Qingdao: Ocean University of China, 2014.
[5]馬新軍. 作業型ROV液壓系統研制與艏向控制技術研究[D]. 杭州: 浙江大學, 2013. MA Xinjun. Development of the hydraulic system and research on the heading control technique of work-class ROV[D]. Hangzhou: Zhejiang University, 2013.
[6]AKRAMIZADEH A, FARJAMI A A, KHALOOZADEH H. Nonlinear Hammerstein model identification using genetic algorithm[C]//Proceedings of IEEE International Conference on Artificial Intelligence Systems. Divnomorskoe, Russia: IEEE, 2002: 351-356.
[7]于瑩瑩, 陳燕, 李桃迎. 改進的遺傳算法求解旅行商問題[J]. 控制與決策, 2014, 29(8): 1483-1488. YU Yingying, CHEN Yan, LI Taoying. Improved genetic algorithm for solving TSP[J]. Control and decision, 2014, 29(8): 1483-1488.
[8]LINHARES A. Preying on optima: a predatory search strategy for combinatorial problems[C]//Proceedings of 1998 IEEE International Conference on Systems, Man, and Cybernetics. San Diego, CA: IEEE, 1998, 3: 2974-2978.
[9]徐宗本, 高勇. 遺傳算法過早收斂現象的特征分析及其預防[J]. 中國科學E(輯), 1996, 26(4): 364-375. XU Zongben, GAO Yong. Character analysis and prophylactic of genetic algorithm's premature convergence[J]. Science in China (series E), 1996, 26(4): 364-375.
[10]萬麗榮, 趙勝剛, 沈瀟, 等. 基于MATLAB/SIMU-LINK的變量泵變量馬達調速系統動態仿真[J]. 煤礦機械, 2007, 28(2): 26-28. WAN Lirong, ZHAO Shenggang, SHEN Xiao, et al. Dynamic simulation of variable displacement pump and variable displacement motor volume speed-modulating system based on MATLAB/SIMULINK[J]. Coal mine machinery, 2007, 28(2): 26-28.
[11]李良, 謝建, 黃建招. 動態面滑模控制在大型液壓起豎系統中的應用研究[J]. 兵工學報, 2014, 35(2): 235-240. LI Liang, XIE Jian, HUANG Jianzhao. Dynamic surface sliding mode control for large hydraulic erecting system[J]. Acta armamentarii, 2014, 35(2): 235-240.
[12]何大闊, 王福利, 賈明興. 遺傳算法初始種群與操作參數的均勻設計[J]. 東北大學學報: 自然科學版, 2005, 26(9): 828-831. HE Dakuo, WANG Fuli, JIA Mingxing. Uniform design of initial population and operational parameters of genetic algorithm[J]. Journal of northeastern university: natural science, 2005, 26(9): 828-831.
[13]孫先仿, 范躍祖, 寧文如. U*均勻設計的均勻性研究[J]. 應用概率統計, 2001, 17(4): 341-345. SUN Xianfang, FAN Yuezu, NING Wenru. On the uniformity of U-uniform designs[J]. Chinese journal of applied probability and statistics, 2001, 17(4): 341-345.
[14]袁偉杰, 劉貴杰, 朱紹鋒. 基于遺傳算法的自治水下機器人水動力參數辨識方法[J]. 機械工程學報, 2010, 46(11): 96-100. YUAN Weijie, LIU Guijie, ZHU Shaofeng. Identification method of hydrodynamic parameters of autonomous underwater vehicle based on genetic algorithm[J]. Journal of mechanical engineering, 2010, 46(11): 96-100.
Parameter identification of variable displacement of an remote operated vehicle hydraulic thruster based on an improved genetic algorithm
DING Hanqing,WANG Xuyang,GE Tong
(School of Naval Architecture, Ocean and Civil Engineering, Shanghai Jiao Tong University, Shanghai 200240, China)
An improved genetic algorithm was designed to identify the parameters of variable displacement of an ROV(remote operated vehicle) hydraulic thruster. To avoid premature convergence and determine an accurate solution, a new method to create an initial population based on a uniform design and new mutation method combined with a predatory search strategy were proposed. This approach improved the ability of the algorithm to perform local searches and solved the problem of global convergence and low search efficiency effectively. An identification experiment was performed on a hydraulic test platform to simulate the hydraulic thruster servo control system. Based on the results of the experiment, an accurate control model of the variable displacement of an ROV hydraulic thruster was identified by the improved genetic algorithm. Comparison of the experimental and simulation results confirmed the validity of the improved algorithm and accuracy of the final control model.
ROV(remote operated vehicle) thruster model; variable displacement motor; genetic algorithm; predatory search strategy; initialization of population
2015-12-28.
日期:2016-11-16.
國家高技術研究發展計劃(2012AA092101).
丁漢卿(1992-), 男, 碩士研究生; 王旭陽(1977-), 男, 助理研究員.
王旭陽, E-mail:wangxuyang@sjtu.edu.cn.
10.11990/jheu.201512091
http://www.cnki.net/kcms/detail/23.1390.u.20161116.1613.014.html
TP391.9
A
1006-7043(2017)02-0168-07
丁漢卿 ,王旭陽,葛彤. 基于改進遺傳算法的ROV推進器伺服系統辨識[J]. 哈爾濱工程大學學報, 2017, 38(2): 168-174. DING Hanqing,WANG Xuyang,GE Tong. Parameter identification of variable displacement of an ROV hydraulic thruster based on an improved genetic algorithm[J]. Journal of Harbin Engineering University, 2017, 38(2): 168-174.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
