地磁環境下衛星磁試驗中的外干擾磁場控制補償方法
2017-03-08 12:34:19吳衛權孫曉春鞠秀亮王根源張義成
航天器環境工程 2017年1期
吳衛權,陳 麗,孫曉春,鞠秀亮,王根源,張義成
(上海衛星裝備研究所,上海 200240)
地磁環境下衛星磁試驗中的外干擾磁場控制補償方法
吳衛權,陳 麗,孫曉春,鞠秀亮,王根源,張義成
(上海衛星裝備研究所,上海 200240)
針對地磁環境下外干擾磁場影響衛星磁試驗精度問題,綜合分析外干擾源場和衛星近場特性;通過合理布局(包括位置和方式)外干擾磁場監測傳感器和衛星磁場采集傳感器,增設動態磁場采集的A/D取樣掃描頻率循環控制、信號統計、濾波、數據擬合等信號處理功能,解決了監測傳感器和采集傳感器所得到的干擾信號的同步性、等效性、一致性,以及采集傳感器信號中衛星真實磁場與干擾磁場之間的不相干性;實現了衛星磁試驗的外干擾磁場有效閉環控制、自動跟蹤、補償和修正。通過24 h實時監測,外干擾磁場波動控制在0.5~1.0 nT 范圍內,獲得地磁環境下衛星24 h“準零磁”環境磁試驗條件,滿足衛星磁試驗對磁環境的技術要求。
衛星;磁試驗;干擾磁場;閉環控制
0 引言
航天器磁測試可在零磁環境中或地磁場環境下進行。在測試方法、測試地點、測試布局等確定以及轉臺、測試儀器研制定型后,環境磁場波動(外干擾磁場)引起的隨機誤差是影響航天器(尤其是大尺寸航天器)磁測試精度的主要因素。
本文針對地磁環境下外干擾磁場影響衛星磁試驗精度問題,通過綜合分析外干擾源場特性及衛星近場特性,通過信號處理手段以及合理布局傳感器等技術措施,實現衛星磁試驗的外干擾磁場有效閉環控制、自動跟蹤、補償和修正,確保衛星磁試驗測試結果的有效性。
1 航天器磁試驗環境條件現狀
1.1 零磁環境試驗條件
大型零磁線圈設備可以在一個相當大(3 m× 3 m× 3m)的空間內建立均勻、穩定的近零磁環境。所謂近零磁環境是指零磁線圈自身磁場波動和環境磁場波動對試驗的綜合影響值小于3 nT,也是國內外有關標準規定作為航天器磁試驗數據有效性的判據。隨著航天器尺寸不斷增大,建設大型零磁線圈設備造價高、技術指標(均勻度、穩定度等)實現難度大,即使建成后也同樣存在著外干擾磁場影響等問題。對于超大型航天器,受目前的零磁線圈尺寸限制,已不能在零磁環境條件下完成試驗,只能選擇在地磁環境下試驗。
1.2 地磁環境試驗條件
地磁環境下影響衛星磁測量的外干擾磁場主要有地磁場波動和工業磁場干擾。地磁場波動可分為由空間磁暴引起的短期變化和地磁場本身的長期變化。工業磁場干擾主要來自衛星磁試驗現場附近的輸電線、公路上運動的車輛、大型工廠、變電站等產生的干擾。
為滿足外干擾磁場波動小于3 nT的要求,地磁環境下航天器磁試驗通常選擇在午夜12點至凌晨4點時段內進行,此時段的地磁場波動及工業干擾場波動能穩定在1 nT左右。地磁環境下航天器磁試驗有效時間較短,且夜間試驗增加了參試人員工作強度。
對上海衛星裝備研究所的磁實驗室進行 24 h監測發現,白天外干擾磁場波動平均達20 nT以上;當附近技術廠房真空設備、行車等機器運轉后,磁場波動可達40 nT左右,因此試驗不能安排在白天進行。可見,如何控制地磁場波動和工業磁場干擾對衛星磁測試的影響并保證試驗測試精度,是地磁環境下衛星磁試驗必須要解決的重要問題。
2 地磁環境下衛星磁測試誤差模型
2.1 磁矩模型
根據航天器近場法磁測試原理,衛星磁試驗時,其磁矩模型可簡單描述為[1]
式中:M為試驗獲取的衛星磁矩,A·m2;Mreal為衛星實際磁矩,A·m2;Merr為試驗誤差產生的磁矩,A·m2;α為與測試距離等相關的綜合系數;Breal為衛星實際產生的磁感應強度,nT;Bfluc為外干擾磁場(地磁場波動和工業干擾場綜合值)引起的磁感應強度,nT;r為探頭中心到試件中心的測試距離,m。
根據上述誤差模型分析,在測試距離確定的條件下,地磁環境下衛星磁測試主要誤差因素為Bfluc。
2.2 外干擾場波動與試驗不確定度關系
根據標準,在測試周期內,航天器在無磁轉臺上繞z軸旋轉1周后由磁傳感器測得的磁場數據波動小于3 nT作為測試有效性判據。表1列出了測試距離確定條件下,外干擾磁場波動與試驗測量磁矩不確定度的關系。

表1 測試距離確定下,外干擾磁場波動與試驗測量磁矩不確定度的關系Table 1 Relation between external interference field fluctuation and test uncertainty
表1數據表明:外干擾磁場波動越大,引起的試驗測量磁矩不確定度也越大。
3 地磁環境下衛星磁測試外干擾場源分析
3.1 外干擾場的頻率特性
1)地磁場波動變化
地磁場的短期波動是隨機的,變化周期一般為幾秒、幾分鐘、幾個小時,而長期變化的周期可以是幾天、幾個月甚至幾十年。長期變化緩慢,對一次磁測量來說可以不考慮。
2)工業磁場干擾源的頻率特性(見表2)
工業磁場干擾源很復雜,大多數由直流干擾源、交流干擾源、鐵磁物質干擾源疊加生成。根據磁場隨時間變化的情況,可分為靜態擾動[2]和動態擾動。其中動態擾動對磁測量有較大影響,它的振幅和頻率取決于干擾源的類型[3]。

表2 一些常見工業磁場干擾源頻率特性參考值Table 2 Reference value of frequency characteristics of some industrial magnetic interference sources
3.2 外干擾場的數值量級
1)地磁場波動量級
地磁日變化是指地磁一天中發生的規則變化,其變化范圍大約50 nT,一般約為該地區總磁場強度的千分之一左右。地磁場白天有幾十nT變化;深夜12點至凌晨4點時間段為最佳平靜期,磁場波動約為1 nT。
2)常見工業磁場干擾源與距離的量值關系(見表3)

表3 一些常見工業磁場干擾源與距離的量值關系Table 3 The relation between some industrial magnetic interference resource and distance

表3(續)
3.3 外干擾源場均勻性、梯度特性
1)地磁場的均勻性、梯度特性
在一個有限的測試區域中(幾百m2的磁實驗室),地磁場變化可以認為是均勻的,不存在梯度場。
2)工業干擾場的均勻性、梯度特性
一般認為工業干擾場存在空間梯度,對于某一種特定工業干擾源場來說,場值隨距離衰減較快(場值以1/r3變化);干擾源和傳感器有一定距離時,可以將不同的干擾源場在空間進行線性疊加或合成計算。
4 地磁環境下衛星磁測試外干擾場補償控制方法
4.1 基本原理
按圖1進行試驗測試,當外干擾磁場有變化時,由監測傳感器與采集傳感器在不同距離(R1、R2)處采集外干擾磁場變化[4]。
如圖2所示的外干擾場控制模塊可以同步自動跟蹤、消除采集傳感器中所受到的外干擾磁場,并將衛星有效磁場數據進行保留和另行處理。因此,一方面,監測傳感器與采集傳感器所采集到的外干擾場變化值必須保持一致性;另一方面,兩傳感器必須滿足不相干性,即監測傳感器僅測得外干擾場信號,而不受衛星磁場信號影響;而采集傳感器僅得到去除外干擾場后的純衛星磁場。也就是說,必須使監測傳感器與采集傳感器所采集的外干擾磁場信號變化值相等,如二者不等則數據處理控制模塊將產生誤差。
4.2 地磁波動控制方法
按圖1所示的單點傳感器布局方式下,當地磁場變化時,圖3所示的控制模塊將監測傳感器測得的地磁波動信號反饋給數據處理模塊以補償采集傳感器獲得的磁場信號(衛星磁場+地磁波動場)[5]。由于傳感器的控制線路串聯閉環、二者信號同步;由外干擾場源特性分析知,地磁場在實驗室區域空間內是近似均勻的,即,監測傳感器與采集傳感器兩處獲得的地磁場的波動變化值可認為是相同的,只要傳感器每個分量軸的方向嚴格以地磁東西向零磁為基準一一對應保持一致,則單點布局方式對控制地磁場變化是有效的,在去除地磁波動變化部分后,采集傳感器獲得的磁場即為衛星磁場值。
4.3 工業磁場干擾控制方法
對于工業磁場干擾,按圖1進行測試。如果工業磁場干擾源距離監測傳感器與采集傳感器的距離不一樣,由于工業干擾場存在空間梯度,對于單點布局方式,同一干擾源2種傳感器所測得的值是不相等的,即干擾不一致。此時,若近似將干擾源場看作隨空間線性變化,則按圖2采用在衛星兩邊對稱布置監測傳感器及均值數據處理方法,可以大大減小梯度場引起的工業磁場干擾場的不一致性。且與單點布局方式相比,對稱布置及均值處理方法對地磁場波動控制更加有效。
至此,可認為對稱布置模式下均值法對地磁環境下衛星磁測試外干擾控制是有效的,可以成功解決工業磁場干擾的不一致性。盡管實際的工業干擾場是上述分析的各種特性場源的疊加,但是根據場的可疊加性,平均值外干擾控制法對于實際疊加的工業磁場干擾也是有效的。
4.4 交流干擾場控制方法
通過工業磁場干擾特性、干擾量值分析及式(1)、表1~表3所示,工業磁場干擾對磁試驗設備的影響主要集中在磁矩測量上,其中對于磁試驗影響最大的工業干擾場源因素主要是交流干擾源。
常規三分量磁通門磁強計頻率響應為 10~30 Hz,在磁強計及相關硬件一定的條件下,可通過測量方法和數據處理方法控制工業交流磁場干擾。具體方法:將交流干擾源分為高頻交流干擾源和低頻交流干擾源,其中高頻信號按圖3[6-7]由控制模塊采用濾波方式處理,解決高頻交流場引起的外干擾不一致性;低頻部分仍由控制模塊采用均值法數據處理方式消除或減輕工業磁場干擾引起的不一致問題。
通過上述外干擾源分類和特性分析、外干擾場頻率特性分析和磁傳感器頻率響應特征分析,采用對稱布置、均值、濾波等數據處理方法,可獲得地磁環境下外干擾場控制的最佳方案。
5 外干擾磁場控制方法的試驗驗證
為驗證外干擾磁場控制方法的有效性,在地磁環境下(白天惡劣外干擾磁場背景)開展衛星磁試驗驗證,并進行連續12 h外干擾場實時跟蹤、補償、控制試驗驗證。
驗證試驗時間段選擇在空間環境模擬設備(該設備距磁實驗室中心區30 m)運行情況下進行。試驗期間,本方法對外干擾環境磁場波動控制約為 0.5~1 nT(見表4),在采集傳感器與衛星之間測試距離3.475~4.630 m范圍內,衛星的磁矩測試誤差在幾十到 200 mA·m2范圍內變化(見表5),外干擾場控制值滿足GJB 7679—2012規定的衛星磁試驗環境要求。
在地磁環境下衛星磁試驗時,由于采用了外干擾磁場波動閉環跟蹤補償控制技術,即:衛星磁矩測試時,計算機根據監測傳感器獲得的干擾源磁場數據對采集傳感器同步獲得的磁場數據進行實時補償和修正,大大地減少了外干擾磁場波動對測試精度影響,實際外干擾磁場波動控制在0.5~1.0 nT 范圍內。

表4 12 h地磁環境下衛星磁試驗外干擾磁場波動及控制監測結果Table 4 12-hour monitored results of external magnetic interference & control value for satellite test in geomagnetic environment
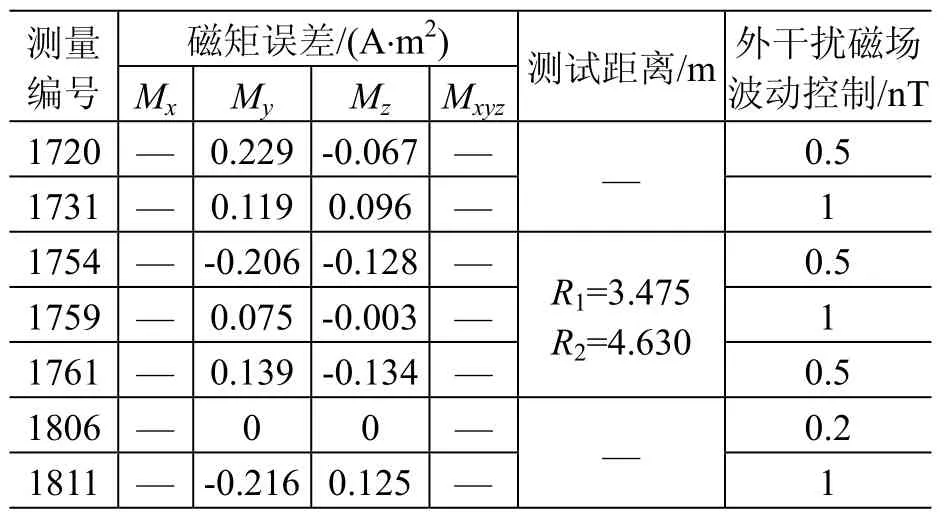
表5 12 h地磁環境下衛星磁試驗外干擾磁場控制方法磁矩測試誤差結果Table 5 12-hour magnetic-moment results with external magnetic interference control for satellite test in geomagnetic environment
6 結束語
衛星磁試驗主要在零磁環境和地磁環境下進行。地磁環境下衛星磁試驗外干擾磁場閉環控制方法可將實際環境磁場干擾波動控制在 0.5~1.0 nT 范圍內,大大減小外干擾磁場波動對磁測試精度的影響。該方法在數十顆衛星研制中得到成功應用,在不具備高均勻度、高穩定度大型零磁設備條件下,很好解決了以往地磁環境下外干擾波動場影響衛星磁試驗精度難題,滿足衛星24 h“準”零磁環境試驗條件,具有較高經濟性、實用性。方法可應用于航空航天、船舶、海洋、地質等相關領域的磁性檢測、監測。
(References)
[1]EICHHORN W L.Magnetic dipole moment determination by near-field analysis: NASA TN D-6685.19[S]: 10
[2]趙凱華, 陳熙謀.電磁學(上)[M].北京: 高等教育出版社, 1985: 335
[3]趙凱華, 陳熙謀.電磁學(下)[M].北京: 高等教育出版社, 1985: 460-670
[4]航天器磁場暴露情況的監測: NASA TM-4322 PD ED 1207[S], 1991: 5
[5]科學儀器的磁設計控制: NASA TM-4322 PD ED 1207[S], 1991: 8
[6]MOSKOWITZ R, LYNCH R.Magnetostatic measurement of spacecraft magnetic dipole moment[J].IEEE Trans Aerospace, 1974, 2(2): 110
[7]Assessment and control of spacecraft magnetic fields: NASA-SP8037[R], 1970: 66
(編輯:閆德葵)
Control and compensation of external magnetic field interference in magnetic-moment test for satellite in geomagnetic environment
WU Weiquan, CHEN Li, SUN Xiaochun, JU Xiuliang,WANG Genyuan, ZHANG Yicheng
(Shanghai Institute of Spacecraft Equipment, Shanghai 200240, China)
This paper analyzes the characteristics of the external interference field and the near-field of a satellite to see how the precision is affected by the outer interference magnetic field in the magnetic tests under geomagnetic environment.By properly placing the sensors monitoring the outer interference magnetic fields, arranging the satellite’s magnetic sensors, with the help of signal processing functions for the dynamic magnetic fields such as A/D sampling scan frequency cycle control, the signal statistics, the filtering waves, and the data fitting, we have achieved the synchronization, the equivalencies, the consistency of the interference signals between the monitoring sensors and the collection sensors, and the non-interference between the real and the interference magnetic fields in signal collection, the effectiveness of the closed-loop control, the auto-detection, and the compensation and the revision of the outer interference magnetic fields under dynamic magnetic environment.The outer interference effects are avoided in the magnetic tests.In the real-time monitoring under the harsh environment, the magnetic interference fluctuations are kept within the range of 0.5 - 1 nT.The test environment conditions of 24h quasi-zero magnetic field are achieved with satisfaction of the technical requirements of the magnetic environment for the magnetic tests of satellites.
satellite; magnetic test; interference of magnetic field; closed-loop control
P318.6+3
:A
:1673-1379(2017)01-0104-05
10.3969/j.issn.1673-1379.2017.01.017
吳衛權(1965—),男,研究員,從事航天器磁設計、磁測試工作。E-mail: 13636581835@163.com。
2016-06-10;
:2017-01-24
吳衛權,陳麗,孫曉春,等.地磁環境下衛星磁試驗中的外干擾磁場控制補償方法[J].航天器環境工程, 2017,34(1): 104-108
WU W Q, CHEN L, SUN X C, et al.Control and compensation of external magnetic field interference in magnetic-moment test for satellite in geomagnetic environment[J].Spacecraft Environment Engineering, 2017, 34(1): 104-108
猜你喜歡
當代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
華人時刊(2020年13期)2020-09-25 08:21:42
中學生數理化(高中版.高二數學)(2020年1期)2020-02-20 13:22:30
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀智能(英語備考)(2019年12期)2020-01-13 06:07:18
中國生殖健康(2019年11期)2019-01-07 01:28:02
中國生殖健康(2018年6期)2018-11-06 07:09:28