基于模糊推理的多特征融合粒子濾波算法
2017-03-02 08:31:00盧健潘峰李陽
計算機與數字工程 2017年2期
盧 健 潘 峰 李 陽
(西安工程大學電子信息學院 西安 710048)
基于模糊推理的多特征融合粒子濾波算法
盧 健 潘 峰 李 陽
(西安工程大學電子信息學院 西安 710048)
論文利用模糊推理方法提出了一種基于多特征融合的粒子濾波跟蹤算法。該算法不但有效繼承了傳統的固定權值融合方法,并且依據模糊推理對跟蹤期間信息的可靠性來輸出權值的大小。根據目標模型的形狀信息和顏色信息特征的觀測似然函數獲取各自在跟蹤過程中的權值;依據模糊推理,對跟蹤期間某一個變化明顯而丟失目標的特征信息改變其權值,同時相應的改變另一個特征信息的權值繼續無誤差的來跟蹤目標。與現有的經典的算法相比,提出的算法有更好的跟蹤性能及較小的定位誤差。實驗結果表明了論文所提出算法的有效性。
模糊推理; 特征融合; 觀測模型; 粒子濾波
Class Number TP301
1 引言
隨著人們對目標跟蹤的要求越來越高,目標跟蹤任務也面臨著越來越多的難點與挑戰[1]。在實際場合中目標所處的環境比較復雜且運動軌跡隨機,其外觀和顏色還會發生變化。現有的大多數算法只能在某一方面解決問題,但不可能勝任變化的所有場景[2]。特別是在對目標進行跟蹤時,光照的變化,外物的遮擋,目標本身形態的變化對目標跟蹤提出了非常苛刻的要求[3]。由此引出的基于智能視頻監控的跟蹤算法研究也成為計算機視覺領域的熱門課題之一,由于其良好的應用前景,國內外眾多研究者也一直圍繞其進行了廣泛深入的研究,并且取得了諸多成果。目前研究者已提出諸多目標追蹤算法例如:Mean Shift算法[4]、Kalman濾波算法[5]、粒子濾波算法[6]等。
由于粒子濾波算法對背景噪聲沒有線性和高斯的限制[7],因此為能夠進行多特征的融合[8]提供了先決條件。本文提出了一種改進的粒子濾波算法。與目前幾種經典的目標跟蹤算法相比,所提出的算法解決了復雜環境下單一特征[9]突然消減或消失而造成的跟蹤目標丟失的問題。該算法將基于多特征融合的觀測模型[10~11]結合到粒子濾波算法中,在某一特征突然變弱后,通過模糊邏輯規則賦予另一個特征較高的權值,對另一個特征進行繼續跟蹤,以實現對目標的穩定無間斷地跟蹤。
2 觀測模型
2.1 形狀信息
在目標跟蹤中主要利用物體的形狀信息。例如,人臉一般用橢圓表示,因為人臉近似為橢圓,汽車一般用矩形表示等。在描述兩個物體相似程度的時候,使用模式識別中的Chamfer距離方法。假設目標當前幀圖像二值圖為It,距離圖像為DIt,形狀模板的二值圖為T,則這兩種形狀間的Chamfer距離計算公式為
(1)
T(Xt)表示形狀模板的中心位置和半徑。|T|代表圖像像素值為1的像素個數。k表示第k個像素為1的像素。DIt(k)表示將當前圖像位于圖像T中第k個像素值的位置下DIt中的灰度值。得到Chamfer距離后,觀測似然函數的定義如下:
(2)
其中δs2為高斯方差,一般取0.5,式(2)反映了候選目標與目標形狀模型的相似程度,值越大則相似程度越高。
2.2 顏色信息
采用顏色直方圖的方法描述特征的顏色分布。假設目標狀態為xt,其中目標區域中心X=(x,y),區域半徑R=(rx,ry),各個像素的位置定義為Xi=(xi,yi),i=1,…,nr,nr為目標區域內像素總和。則目標區域內顏色分布概率密度函數為
u=1,…,m
(3)
其中,δ為狄拉克函數,k(x)為權值函數:
(4)
當‖r‖≥1的時候,k(‖r‖)取0。
無論物體具有什么樣的特征,在進行目標跟蹤的過程中,可一般性地認為離中心越遠的地方,像素屬于目標區域的可能性越小,所以在上面引入了k(x)這一權值函數,降低遠離中心區域像素的權值。再用Bhattacharyya系數來表示目標區域和候選區域顏色分布的相似度,則有目標p(u)與候選目標p(u)(xt)的相似程度可表示為
(5)

(6)
顏色觀測似然函數定義為
(7)

3 基于模糊推理的多特征信息融合
3.1 多特征信息融合
給定目標狀態xt,設計目標觀測函數如下:
P(zt|xt)=aps(zt|xt)+bpc(zt|xt),a+b=1
(8)
該式在形式上融合了目標形狀信息和顏色信息兩部分的觀測量,ps(zt|xt)是目標形狀模型的觀測似然函數,pc(zt|xt)是目標顏色模型的觀測似然函數。a和b分別代表兩種模型在整個跟蹤過程中的權重并且有0≤a,b≤1。在跟蹤過程中,如果某一段時間內,顏色信息可靠,則這段時間中a值較大,否則b值較大。
3.2 模糊推理與權值調節
模糊規則定義如下:

其中,Rj為第j條模糊規則,i為模糊規則總數,e為模糊輸入,u為模糊輸出。A和B為模糊集合。模糊推理的原理如圖1所示,即在論域中的模糊集用[0 1]上取值的隸屬函數u來說明隸屬程度。
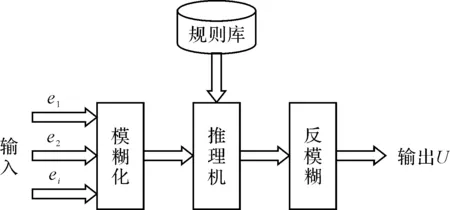
圖1 模糊推理原理圖
在運用到本文算法中的時候,模糊輸入e即為當前幀目標形狀和顏色的的似然函數,分別用es和ec來表示,可由式(2)和式(7)求出。輸出u為形狀權值a和顏色權值b。根據式(8)中的a+b=1,所以只需要求出一個權值,則另一個權值也知道了。模糊推理對跟蹤期間不可靠的信息輸出較小的權值,相反輸出較大權值。
4 基于雙特征融合的粒子濾波算法
在運用特征融合技術的時候,需要知道目標模型的觀測似然函數,而粒子濾波算法無論是對目標狀態還是對目標觀測模型、系統噪聲的分布都沒有限制,因此將雙特征融合同粒子濾波算法結合起來。
4.1 系統初始化

4.2 重要性采樣

求得t時刻目標的真實位置,再根據目標的特征信息計算似然函數:
1) 由式(2)計算形狀觀測似然函數ps(zt|xt);
2) 由式(7)計算顏色觀測似然函數pc(zt|xt);
3) 由式(8)計算總的觀測似然函數P(zt|xt)。
(9)
并對其歸一化處理:
(10)
4.3 重采樣


(11)
(12)
再根據式(2)式(7)分別計算目標形狀特征和顏色特征信息的模糊輸入es和ec。根據es和ec利用模糊推理來調節每個特征信息的權值a和b。
5 實驗結果與分析
本文以Visual Studio 2012為開發工具和微機自帶的攝像頭在無光照變化、有遮擋和顏色發生變化的情況下實現了提出的目標跟蹤算法(如圖2),并與經典的粒子濾波目標跟蹤算法進行比較。其中圖2第一幅圖可知(a)經典粒子濾波跟蹤算法在跟蹤目標時當顏色特征或形狀發生變化時,跟蹤就會發生漂移而脫離目標。而對(b)模糊推理的多特征融合粒子濾波跟蹤算法卻沒有因為某一特征的改變而丟失對目標的跟蹤。

圖2(a) 經典粒子濾波在跟蹤算法

圖2(b) 改進的粒子濾波跟蹤算法
實驗中利用顏色核函數直方圖和Chamfer距離的似然函數兩種信息來共同描述目標的觀測方程,再引入模糊推理理論對兩種不同的特征信息賦權值a和b,當某一個特征變化明顯時,其權值變小而另一個特征的權值變大從而能持續無較大影響的跟蹤目標。圖3所示為經典粒子濾波和本文方法的跟蹤目標曲線,可以看出,改進的粒子濾波能穩定且誤差較小的跟蹤上目標,通過仿真實驗可看出雖然跟蹤時間略長,但在滿足實時性跟蹤處理的要求下能更穩定更低誤差的跟蹤目標。

表1 實驗跟蹤誤差(標準誤差均值)和平均每幀跟蹤時間比較


圖3 跟蹤目標曲線圖
圖4為經典粒子濾波算法和本文提出的算法在該圖像序列上的跟蹤誤差,可以看出采樣次數的增加對本文算法的誤差影響并不大。由圖3和表1可以看出本文算法的穩定跟蹤時間為43.18ms(略大于經典粒子濾波(39.97ms)),但是能滿足實時性跟蹤處理要求。
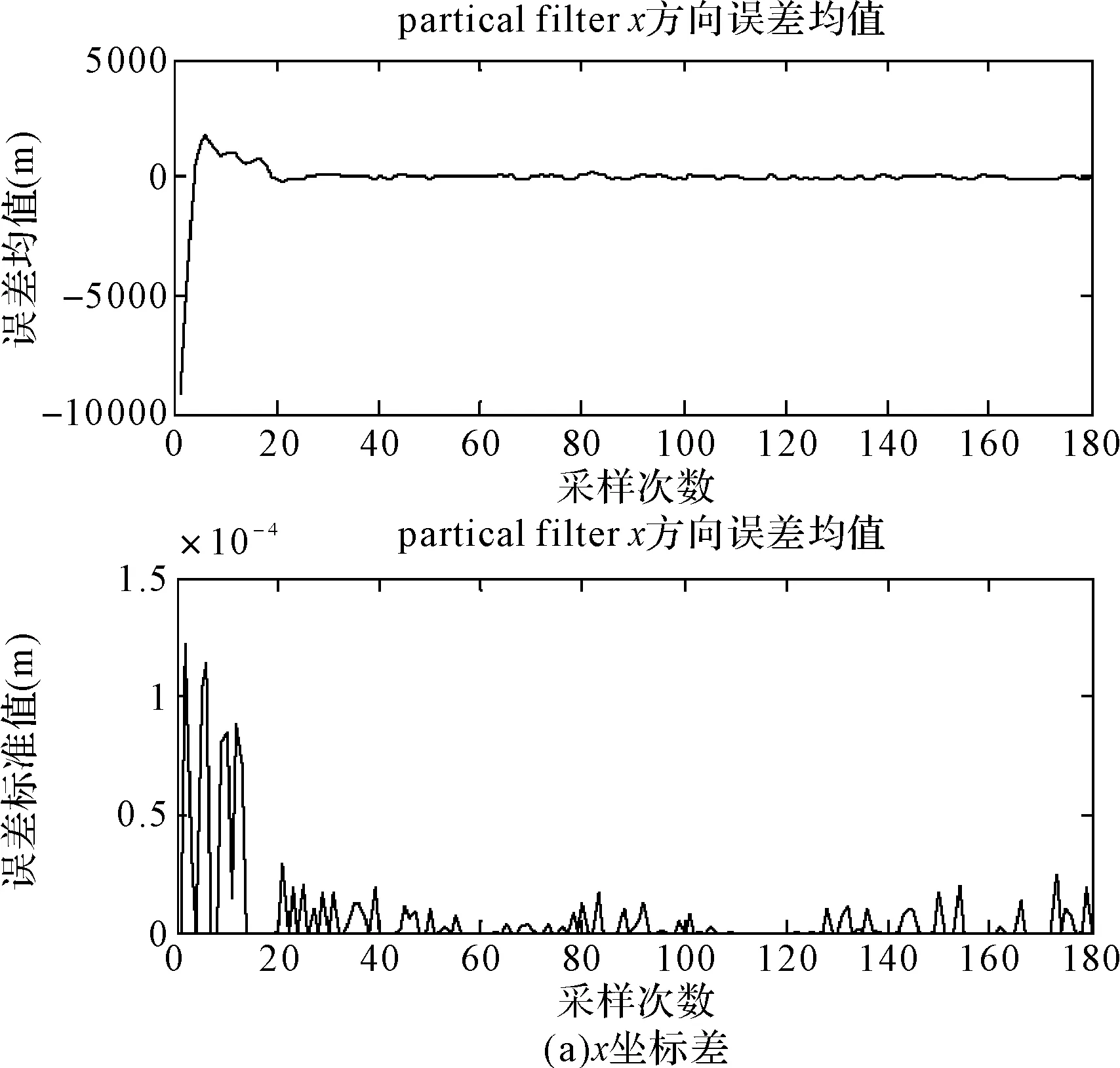


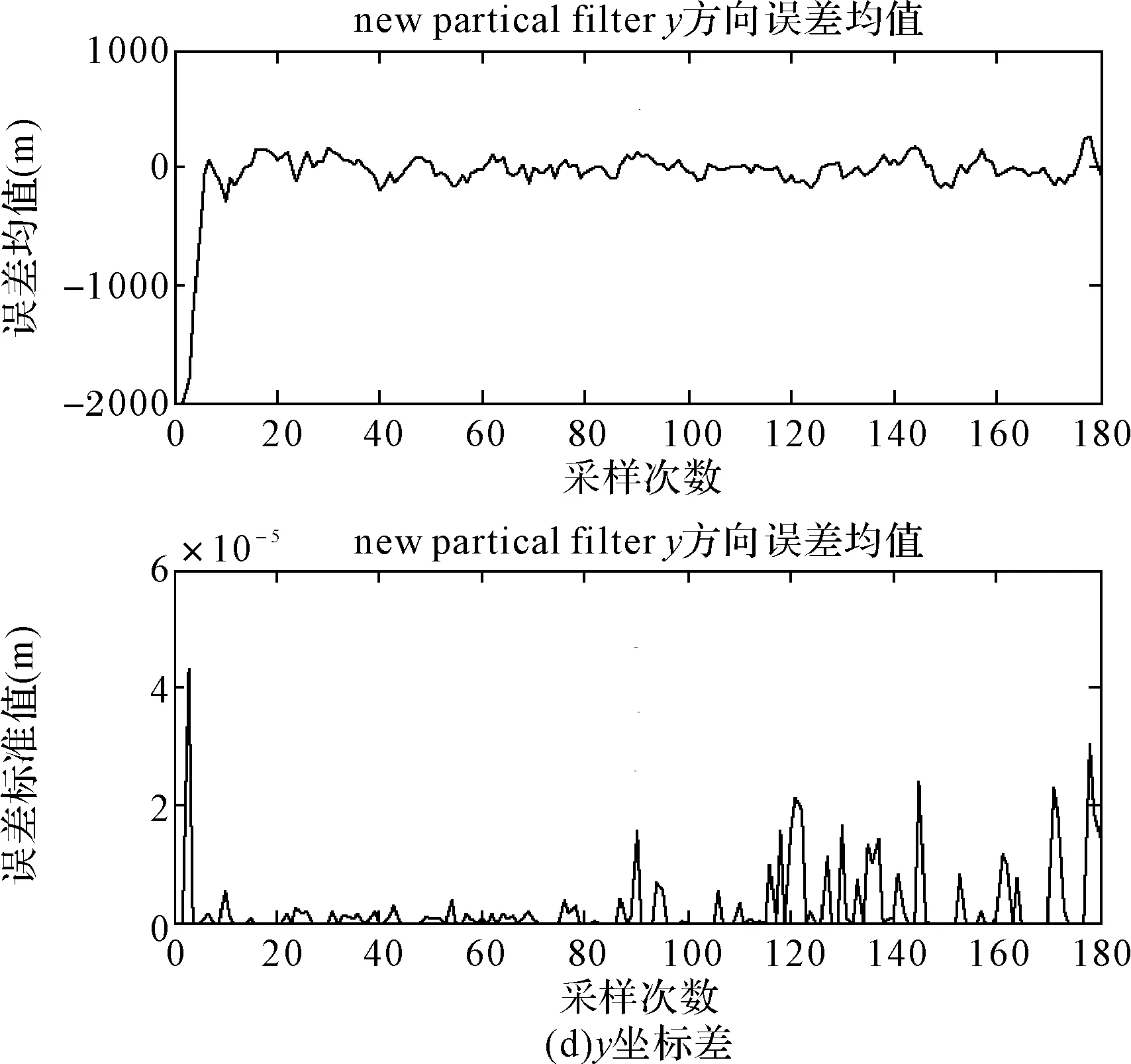
圖2 經典粒子濾波算法與本文算法跟蹤誤差比較
6 結語
基于經典粒子濾波基礎上,提出一種利用模糊推理的多特征融合粒子濾波算法。該算法既能融合目標形狀、顏色雙特征信息,還可以穩定較小誤差的跟蹤目標。本文算法優于經典的particle filter算法。
[1] 楊威,付耀文,潘曉剛,等.弱目標檢測前跟蹤技術研究綜述[J].電子學報,2014,42(9):1789-1792. YANG Wei, FU Yaowen, PAN Xiaogang, et al. Track-Before-Detect Technique for Dim Targets: An Overview[J]. ACTA Electronica Sinica,2014,42(9):1789-1792.
[2] 陳遠.復雜場景中視覺運動目標檢測與跟蹤[D].武漢:華中科技大學博士論文,2008. CHEN Yuan. Research on Visual Object Detecting and Tracking in Complex Environment[D]. Wuhan: For the Degree of Doctor of Philosophy in Engineering of Huazhong University of Science and Technology,2008.
[3] 薛陳,朱明,劉春香.遮擋情況下目標跟蹤算法綜述[J].中國光學與應用光學,2009,5(2):388-394. XUE Chen, ZHU Ming, LIU Chunxiang. Review of tracking algorithms under occlusions[J]. Chinese Optics and Applied Optics Abstracts,2009,5(2):388-394.
[4] 楊璐,李明,張鵬.一種新的改進粒子濾波算法[J].西安電子科技大學學報(自然科學版),2010,37(5):862-865. YANG Lu, LI Ming, ZHANG Peng. New improved particle filter algorithms[J]. Journal of Xidian University(Natural Science),2010,37(5):862-865.
[5] 顧幸方,茅耀斌,李秋潔.基于Mean Shift的視覺目標跟蹤算法綜述[J].計算機科學,2012,12(39):16-24. GU Xingfang, MAO Yaobin, LI Qiujie. Survey on Visual Tracking Algorithms Based on Mean Shift[J]. Computer Science,2012,12(39):16-24.
[6] Yilmaz A, Javed O, Shah M. Object tracking: A survey[J]. ACM Computing Surveys,2006,(4):1-45.
[7] 高秀斌,丁盼盼,蔣長帥,等.一種基于多特征融合的粒子濾波目標跟蹤算法[J].揚州大學學報(自然科學版),2012,41(6):752-759. GAO Xiubin, DING Panpan, JIANG Changshuai, et al. A particle filter object tracking algorithm based on multi-feature fusion[J]. Journal of Yangzhou University(Natural Science Edition),2012,41(6):752-759.
[8] 袁廣林,薛模根,韓裕生,等.基于自適應多特征融合的mean shift目標跟蹤[J].計算機研究與發展,2010,47(9):1663-1671. YUAN Guanglin, XUE Mogen, HAN Yusheng, et al. Mean Shift Object Tracking Based on Adaptive Multi-Feature Fusion[J]. Journal of Computer Research and Development,2010,47(9):1663-1671.
[9] 趙敏.單目視覺多行人目標檢測與跟蹤技術研究[D].重慶:重慶大學博士論文,2010. ZHAO Min. Study on Multi-pedestrian Detection and Tracking Technology with Monocular Vision[D]. Chongqing: A Thesis Submitted to Chongqing Unitersity in Partial Fulfillment of the Requirement for the Degree of Doctor of Engineering,2010.
[10] 安國成,高建坡,吳鎮揚.基于多觀測模型的粒子濾波頭部跟蹤算法[J].中國圖象圖形學報,2009,14(1):106-111. AN Guocheng, GAO Jianbo, WU Zhenyang. Particle Filter Algorithm for Head Tracking Based on Multi-observation Models[J]. Journal of Image and Graphics,2009,14(1):106-111.
[11] 曹潔,李偉.基于多特征融合的目標跟蹤算法[J].蘭州理工大學學報,2011,37(2):80-84. CAO Jie, LI Wei. Object tracking based on multi-feature fusion[J]. Journal of Lanzhou University of Technology,2011,37(2):80-84.
[12] 郭瑛,艾渤,鐘章隊.重要性采樣研究進展[J].信息與電子工程,2011,5(9):604-609. GUO Ying, AI Bo, ZHONG Zhangdui. A review of importance sampling research[J]. Information and Electronic Engineering,2011,5(9):604-609.
Multi-Feature Fusion Particle Filter Algorithm Based on Fuzzy Reasoning
LU Jian PAN Feng LI Yang
(College of Electronic and Information, Xi’an Polytechnic University, Xi’an 710048)
This paper proposes a modified particle filter algorithm based on multi-feature fusion by using the fuzzy reasoning method. The method effectively follows fusion methods with the fixed weight, at the same time, the fuzzy inference based upon the reliability of tracking information to decide the weight. We seek the each tracking weight ratio according to the observation likelihood function of target model’s sharp and color feature. On the basis of fuzzy reasoning, when the feature information changed during the course of tracking, we can change its weight ratio, at the same time change another feature information weight ratio to continue tracking target without error. Compared with the existing classic algorithms, the proposed algorithm has a better tracking performance property and smaller positioning error. The experimental result shows the better effectiveness than the presented algorithm.
fuzzy reasoning, feature fusion, observation model, particle filter
2016年8月1日,
2016年9月17日
國家自然科學基金項目(編號:61040055);陜西省教育廳科學研究項目(編號:2013JK1109)資助。
盧健,男,博士,副教授,研究方向:AUV協同導航,目標跟蹤,圖像處理與模式識別。潘峰,男,碩士研究生,研究方向:圖像分割與融合。李陽,男,碩士研究生,研究方向:圖像壓縮。
TP301
10.3969/j.issn.1672-9722.2017.02.028
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
現代出版(2020年3期)2020-06-20 07:10:34
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
