汽車車身控制器的設(shè)計(jì)與實(shí)現(xiàn)
2017-02-23 12:58:57張麗
電子技術(shù)與軟件工程 2016年24期
舒適性、安全性和多樣性已成為汽車行業(yè)的發(fā)展趨勢(shì)。車身控制模塊是實(shí)現(xiàn)車身功能要求的核心。文中設(shè)計(jì)了基于CAN/LIN總線的車身控制總體方案,以CAN總線為主,由LIN總線輔助的控制模式。并對(duì)前車身控制器的硬件進(jìn)行了設(shè)計(jì),在硬件設(shè)計(jì)的基礎(chǔ)上完成了前車身控制器的軟件設(shè)計(jì)。以期為我國汽車電子技術(shù)發(fā)展提供參考和借鑒。
【關(guān)鍵詞】車身控制 CAN總線 LIN總線
在當(dāng)今社會(huì),汽車作為經(jīng)濟(jì)發(fā)展和生活之中最重要的交通工具之一。隨著計(jì)算機(jī)技術(shù)和汽車技術(shù)的發(fā)展,電子控制技術(shù)已廣泛應(yīng)用于現(xiàn)代汽車工業(yè),用于提高車輛安全、經(jīng)濟(jì)和舒適性等,已成為現(xiàn)代汽車行業(yè)的發(fā)展趨勢(shì)和重要標(biāo)志。
汽車車身的很多部位都得益于電子控制系統(tǒng),其中包括點(diǎn)火控制、規(guī)則診斷、轉(zhuǎn)向、制動(dòng)、車燈、雨刷器、門鎖等。根據(jù)在不同控制系統(tǒng)中汽車電子技術(shù)的應(yīng)用可分為:發(fā)動(dòng)機(jī)控制系統(tǒng)、車身控制系統(tǒng)、底盤控制系統(tǒng)、通信和信息/娛樂系統(tǒng)。為了縮短與國外汽車電子控制技術(shù)的差距,不斷提高自身的競(jìng)爭(zhēng)力,開發(fā)汽車電子控制系統(tǒng)勢(shì)在必行。
1 車身控制系統(tǒng)總體方案設(shè)計(jì)
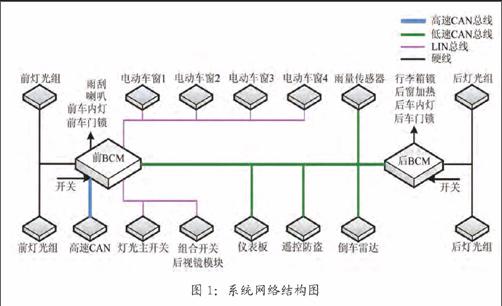
車身控制系統(tǒng)采用分布式控制系統(tǒng),并采用了CAN/ LIN總線混合網(wǎng)絡(luò),如圖1所示為系統(tǒng)結(jié)構(gòu)。以前車身控制系統(tǒng)為核心,協(xié)調(diào)車身各部分的控制。在整個(gè)系統(tǒng)中,前車身控制器作為高、低CAN和LIN總線的網(wǎng)關(guān),實(shí)現(xiàn)不同網(wǎng)絡(luò)的通信和信號(hào)共享。高速CAN網(wǎng)絡(luò)把底盤控制系統(tǒng)信號(hào)傳輸?shù)狡渌行枰目刂撇考?shí)時(shí)顯示在儀表板上。燈控開關(guān)信號(hào)通過LIN網(wǎng)絡(luò)發(fā)送到后端的BCM控制后方左、右燈組。
采用兩路LIN總線,1路采集組合開關(guān)和車燈開關(guān)的信號(hào)。2路用于控制防夾車窗、車窗升降等。前車身控制模塊除了負(fù)責(zé)信號(hào)處理和網(wǎng)絡(luò)管理外,還控制前后燈光組、前車內(nèi)燈、防夾窗、揚(yáng)聲器、智能雨刷等功能。后車身控制模塊主要是控制車輛后部,如左右燈組、后車燈、汽車門鎖、窗加熱等功能。
2 前車身控制系統(tǒng)硬件設(shè)計(jì)
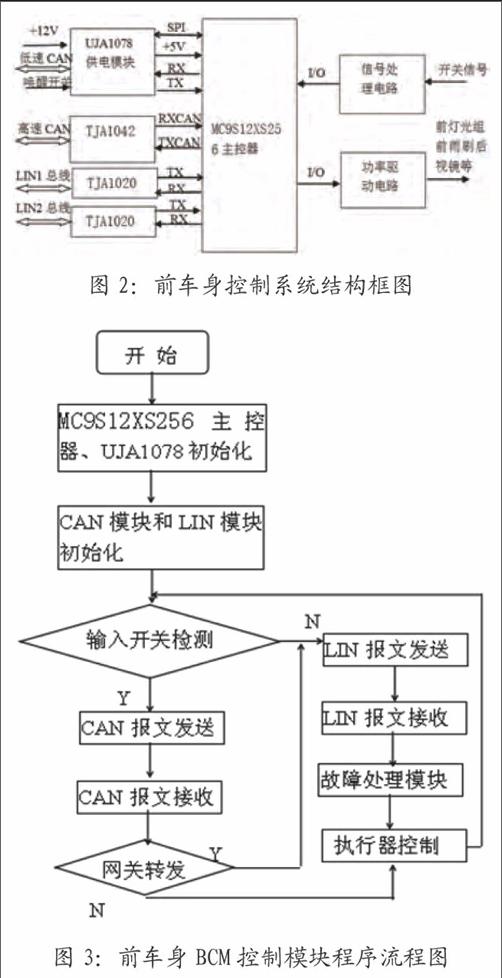
前車身控制器采集大量的開關(guān)信號(hào),輸出控制也多,以及作為CAN網(wǎng)絡(luò)和LIN網(wǎng)絡(luò)的網(wǎng)關(guān)。這就要求選擇具有高性能和高可靠性的微處理器,實(shí)現(xiàn)高速、可靠的數(shù)據(jù)處理。飛思卡爾半導(dǎo)體公司設(shè)計(jì)和生產(chǎn)的應(yīng)用于汽車的mc9s12xs256單片機(jī),集成了MSCAN模塊、串行通信接口,支持CAN總線和LIN總線協(xié)議。
前車身控制器包含兩路CAN總線和兩路LIN總線,低速CAN總線采用集成一路CAN總線的UJA1078 SBC電源芯片,高速CAN總線采用收發(fā)器TJA1042。兩路LIN總線均采用收發(fā)器TJA1020,還有21路開關(guān)信號(hào)的采集、7位A/D信號(hào)采集、11路照明驅(qū)動(dòng)信號(hào)輸出、4雨刮、揚(yáng)聲器輸出。圖2為前BCM模塊系統(tǒng)結(jié)構(gòu)框圖。
3 前車身控制系統(tǒng)軟件設(shè)計(jì)
根據(jù)整個(gè)車身部分的實(shí)時(shí)性要求,高速CAN網(wǎng)絡(luò)通信速率采用500kb/s ,低速CAN網(wǎng)絡(luò)采用250kb/s,2路LIN總線通信速率均采用19.2 kb/s。整車車身部分網(wǎng)絡(luò)通負(fù)載偏低,通信速率可以完全滿足實(shí)時(shí)性和可靠性的要求。汽車控制器軟件設(shè)計(jì)包括系統(tǒng)初始化、系統(tǒng)應(yīng)用、CAN/LIN協(xié)議轉(zhuǎn)換、系統(tǒng)故障程序設(shè)計(jì)。前車身BCM控制模塊程序流程圖如圖3所示。
4 結(jié)論
雖然國內(nèi)的汽車制造技術(shù)和創(chuàng)新能力都在不斷提高,但就目前而言,國內(nèi)自主品牌汽車制造商制造工藝和創(chuàng)新能力偏低。設(shè)計(jì)基于CAN / LIN總線的車身控制模塊,以CAN總線為主,由LIN總線輔助的控制模式。采用合理的網(wǎng)絡(luò)結(jié)構(gòu)和硬件設(shè)計(jì)來滿足復(fù)雜的車身控制系統(tǒng)的要求,具有良好的經(jīng)濟(jì)性,使設(shè)計(jì)變得簡(jiǎn)單。
參考文獻(xiàn)
[1]張華,蔡偉杰,陳文強(qiáng),韋新民,馮擎峰. 基于CANoe的PEPS系統(tǒng)PS功能故障分析[J].汽車電器,2013(10).
[2]Z.A.Ghani,M.A.Hannan,A.Mohamed. Simulation model linked PV inverter implementation utilizing dSPACE DS1104 controller[J].Energy & Buildings,2013(06).
[3]呂峰,歐增開.整車電控系統(tǒng)硬件在環(huán)測(cè)試技術(shù)研究[J].汽車電器,2013(07).
作者簡(jiǎn)介
張麗,女,現(xiàn)供職于聯(lián)合汽車電子有限公司。
作者單位
聯(lián)合汽車電子有限公司 上海市 201206